Топология построения систем самодиагностики: вариативность и оптимальность

Автор: Жосан А.А., Ревякин М.М.
Журнал: Вестник аграрной науки @vestnikogau
Рубрика: Инженерно-технические решения в АПК
Статья в выпуске: 2 (29), 2011 года.
Бесплатный доступ
Обоснована причина создания системы самодиагностики мобильных энергетических средств. Рассмотрена топология построения системы самодиагностики. Выявлена оптимальная структура в ее формировании.
Надежность, заявленный ресурс, самодиагностика, уровневая архитектура, структура построения
Короткий адрес: https://sciup.org/147123653
IDR: 147123653
Текст научной статьи Топология построения систем самодиагностики: вариативность и оптимальность
обслуживания предусмотрено диагностирование [1]. Однако все это не решит вопрос достижения заявленного ресурса . Планово - предупредительная система технического обслуживания не учитывает фактическое состояние МЭС и ее цикличность также неудовлетворительна . Большинство диагностических средств способны фиксировать момент наступления отказа в точке m 1 ( m 2 ), удаленной от точки E 1 ( E 2 ) на величину δ 1 ( δ 2 ), что в свою очередь незначительно уменьшит периоды восстановления объекта ∆ t ( рис . 1). Но тогда можно говорить о « незавершенном отказе », т . е . факт наличия отказа зафиксирован при недостижении объектом предельно допустимого значения качества . Однако даже такая величина B 1 m 1 ( B 2 m 2 ) на отрезке отказа F 1 ( F 2 ) способна негативно отразиться на качестве МЭС , что в конечном итоге повлияет на ресурс . Решением этой проблемы является использование программных структур и физических компонентов , позволяющих фиксировать моменты формирования отказов ( точки B 1 , B 2 и близкие к ним ), а также исключить характер внезапности их появления , т . е . применение системы самодиагностики . Это в значительной мере повысит надежность МЭС в целом .
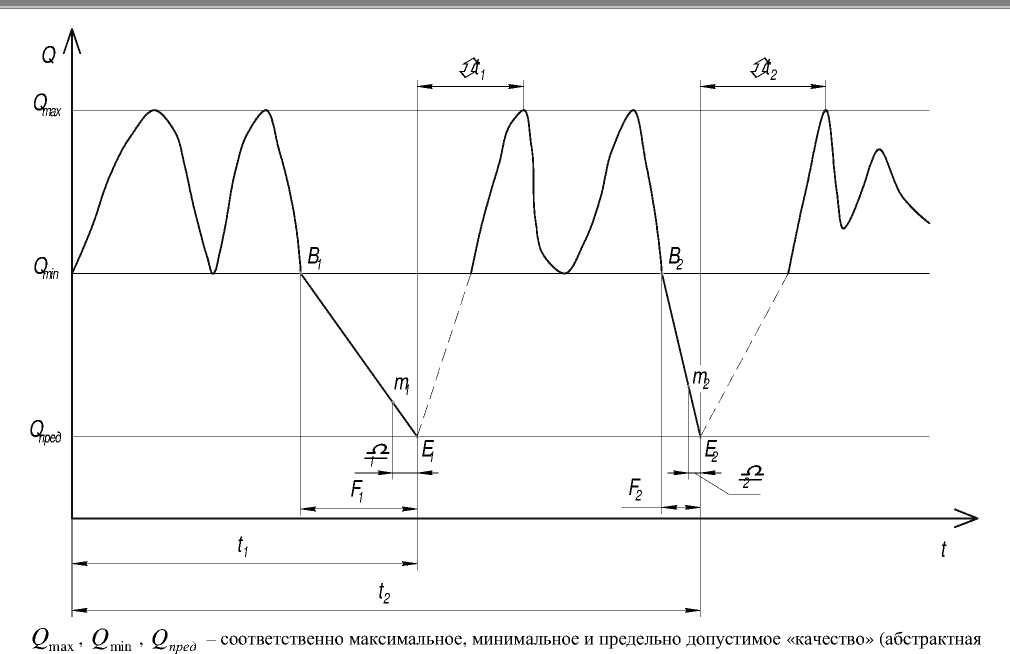
величина ) МЭС ; B 1 , B 2 – начала формирования отказа ; E 1 , E 2 – точки отказа ; ∆ t 1 , ∆ t 2 – периоды восстановления Рисунок 1 – Характер изменения « качества » МЭС в процессе эксплуатации
Одним из вариантов формализации системы бортовой самодиагностики является использование внутренней коммуникационной шины для передачи данных. Таким образом, формируется локальная сеть открытого типа непосредственно на борту МЭС [2].
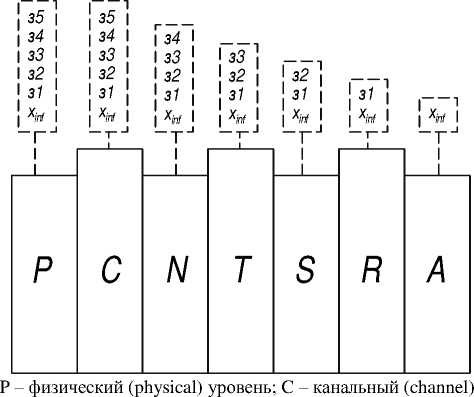
уровень ; N – сетевой (network) уровень ; T – транспортный (transport) уровень ; S – сеансовый (show) уровень ; R – представительный (representative) уровень ;
A – прикладной (applied) уровень ; x inf – блок информации ; з – уникальный заголовок
Рисунок 2 – Уровневая архитектура системы самодиагностики
Представительный уровень определяет синтаксис ( инициализация и формирование ) данных в системе в
Данная структура характеризуется уровневой архитектурой ( рис . 2).
Прикладной уровень осуществляет поддержку прикладных процессов конечных пользователей . Данный уровень фиксирует спектр прикладных задач , реализуемых в локальной сети .
кодированных и форматированных модификациях , свойственных рассматриваемой нами структуре . В целях упрощения архитектуры оправдано его объединение с прикладным уровнем .
Сеансовый уровень реализует установление и поддержку передачи потоков по локациям сети и позволяет производить обмен информацией в режимах , установленных на прикладном уровне , а также завершает сеанс связи .
Рассмотренные уровни , согласно требованиям LAN (Local Area Network), целесообразно суммировать в общий прикладной процесс , который определяет функциональные особенности локальной сети на борту МЭС как прикладной системы .
Транспортный уровень обеспечивает интерфейс между процессами и сетью путем формирования логико - транспондерных каналов ( ЛТК ), что позволяет осуществлять передачу информационных пакетов , которыми обмениваются компоненты системы .
Сетевой уровень определяет интерфейс оборудования оператора с сетевой передачей пакетов , а также отвечает за маршрутизацию в рамках локальной сети и за связь между сетями , тем самым , обеспечивая межсетевое взаимодействие ( на предмет использования диагностической информации системы самодиагностики вне самой системы ).
Канальный уровень обеспечивает передачу информации по логическому каналу между двумя и более идентичными по образующему составу структурными элементами , соединенными физическим каналом . Канальный уровень обеспечивает управление потоком данных в виде фреймов , в которые упаковываются информационные пакеты , обнаруживает ошибки передачи и реализует логическую структуру восстановления информации при фиксации сбоев или потерь данных . Фрейм характеризуется данными об источнике , информацией о конечном объекте приема , информацией о собственном типе , контекстными данными и контрольной информацией .
Физический уровень выполняет все необходимые процедуры в канале связи . Основной задачей является управление аппаратурой передачи данных и подключенным к ней каналом связи .
При транспортировке информационного потока от прикладного процесса в основную сферу локальной сети осуществляется его обработка на каждом уровне ( рис . 2). Каждый уровень добавляет к информации процесса уникальный заголовок , т . е . служебную информацию , необходимую для адресации и для контрольных функций . Канальный уровень суммирует полученный блок фреймов и добавляет контрольную последовательность , которая используется для проверки правильности приема потока из коммуникаций сети .
Физический уровень характеризуется блокацией заголовков . Информационный блок уходит в коммуникационную сеть , где осуществляется дешифрация адресов и определяется предназначение полученных данных . При этом происходит процесс удаления уникальных заголовков каждым уровнем системы . Считывание заголовков верхних уровней нижними уровнями невозможно по принципам прозрачности . Таким образом , перемещаясь по уровням , информация поступает к процессу , которому была адресована .
Рассмотренная уровневая архитектура является оптимальным вариантом , полностью гарантирующим возможность расширения ( терминальное оборудование должно поддерживать расширение системы как альтернативу замены и обновления отдельных частей ). Если между уровнями реализованы однозначно интерфейсы , то замена одного из уровней не влечет за собой необходимости внесения изменений в другие уровни . Таким образом , уровни относительно независимы друг от друга .
Структурные элементы системы самодиагностики ( они же структурные элементы локальной сети ) в рамках отдельного МЭС могут быть расположены в стохастическом порядке . Следует отметить , что для способа обращения к передающей среде и методов управления локальной сетью небезразлично расположение структурных единиц . Поэтому необходимо рассмотреть возможные варианты .
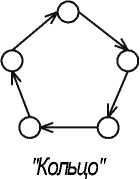
Кольцевая структура ( рис . 3) предусматривает соединение структурных единиц в сети в замкнутый контур кабелем передающей среды . Выход одной единицы сети соединяется с входом другого . Информация по каналу передается от элемента к элементу . Каждый промежуточный элемент между передатчиком и приемником осуществляет ретрансляцию посланной информации . Принимающий элемент распознает и получает только адресованную ему информацию . Для данной схемы характерен симплексный режим обмена информацией , т . е . возможна передача лишь одного модуля . Структура обусловлена отсутствием центрального узла , что повышает ее надежность . Однако последовательный порядок обслуживания элементов в такой сети снижает ее быстродействие , а выход из строя одного из элементов нарушает целостность « кольца » и требует принятия специальных мер для сохранения тракта передачи информации .
" Ш и н а "
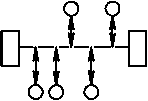

"З в е з д а "
Рисунок 3 – Типы систем обмена в диагностике
Структура типа « Звезда » основана на концепции центрального узла , куда подключаются интерфейсы периферии . Они имеют обособленную линию связи с центром . Поток информации неизбежно проходит через центральный узел , где осуществляется его передача на другие элементы с помощью переключения и маршрутизации потока . Начать передачу потока может любой элемент только в том случае , если линия связи свободна . Это полудуплексный режим обмена . Работоспособность сети полностью зависит от центрального узла .
Структура типа « Ш ина » характеризуется сложным распространением данных от передающего элемента . [3] Промежуточные элементы не транслируют поступающую информацию . Она поступает на все элементы , но прием осуществляется только указанным адресатом . При связи нескольких структурных единиц в такую схему в каждый момент времени связь может быть осуществлена между одной единицей – источником информации и одним или несколькими единицами – приемниками по общему каналу передачи со структурой связи « много – точка ». Это обеспечивает высокое быстродействие сети на борту МЭС .
Таким образом, целесообразно применение бортовых систем самодиагностики для постоянного мониторинга работы узлов и агрегатов. Поскольку для оптимальной работы системы диагностирования необходим обмен данными, поступающими с системы датчиков и других ЭБУ, целесообразность применения схемы типа «Ш ина».
Список литературы Топология построения систем самодиагностики: вариативность и оптимальность
- Никитин, Е. А. Диагностирование дизелей/Е. А. Никитин. -М.: Машиностроение. -1987. -246 с
- Калашников, В. И. Информационно-измерительная техника и технологии/В. И. Калашников, С. В. Нефедов, А. Б. Путилин. -М.: Высшая школа. -2002. -520 с
- Блохнин, С. М. Шина ISA персонального компьютера типа IBM PC/AT/С. М. Блохнин. -М.: ПК «Сплайн». -1995. -76 с
