Traffic sign detection based on color segmentation of obscure image candidates: a comprehensive study

Author: Dip Nandi, A.F.M. Saifuddin Saif, Prottoy Paul, Kazi Md. Zubair, Seemanta Ahmed Shubho
Journal: International Journal of Modern Education and Computer Science @ijmecs
Article in issue: 6 vol.10, 2018.
Free access
Automated Vehicular System has become a necessity in the current technological revolution. Real Traffic sign detection and recognition is a vital part of that system that will find roadside traffic signs to warn the automated system or driver beforehand of the physical conditions of roads. Mostly, researchers based on Traffic sign detection face problems such as locating the sign, classifying it and distinguishing one sign from another. The most common approach for locating and detecting traffic signs is the color information extraction method. The accuracy of color information extraction is dependent upon the selection of a proper color space and its capability to be robust enough to provide color analysis data. Techniques ranging from template matching to critical Machine Learning algorithms are used in the recognition process. The main purpose of this research is to give a review based on methods and framework of Traffic Sign Detection and Recognition solution and discuss also the current challenges of the whole solution.
Color-based detection, Shape-based detection, Uncontrolled Environment, Multi-class classification
Short address: https://sciup.org/15016771
IDR: 15016771 | DOI: 10.5815/ijmecs.2018.06.05
Text of the scientific article Traffic sign detection based on color segmentation of obscure image candidates: a comprehensive study
Published Online June 2018 in MECS DOI: 10.5815/ijmecs.2018.06.05
-
I. Introduction
Embedded and Intelligent Automated Solution for vehicles for safety in transportation has been the limelight of research in the Computer Vision and Pattern Recognition community for more than thirty years. Pacilik [1] outlined the development of Traffic Sign Detection and Recognition tracking it from its currently popular methods to the paramount study of it in Japan, 1984. The most common automated systems belonging to Traffic Sign Detection and Recognition comprise one or two video cameras mounted on the front of the vehicle (e.g. a geo van). The cars are retrofitted with a PC system
for acquiring the videos, or specialized hardware for driving assistance applications Ref. [64]. For convenience Traffic Sign Detection and Recognition will be termed as “TSDR” in this review.
TSDR is a technology that is being researched and enforced within the business industries. Many automobile manufacturers (such as Tesla, Inc., Continental AG) develop the technology to detect and recognize the road traffic signs as a part of the smart vehicle. In 2010, the BMW initiated the project for the production of a TSDR system which was tested by ADAC, the renowned automobile club in Germany Ref. [61]. Volkswagen has also introduced it on the Audi A8 Ref. [62]. Furthermore, Mercedes-Benz has developed traffic sign recognition systems on their E and S class vehicles. Additionally, Google has also started industrialization of self-driving vehicles. Google’s autonomous vehicle is able to securely operate in complex urban situations Ref [63].
Road signs have specific properties that distinguish them from other outdoor objects. Operating systems for the automated recognition system of road signs are designed to identify these properties. TSDR usually follows the steps shown in Figure 1. Detection by verification of the hypothesis of the presence of the sign (e.g. equilateral triangles, circles, etc. ). Categorization/Recognition of the type of traffic sign and then detection of the signs from outdoor images is the most complex step in the TSDR system Ref. [2].
Many issues make the problem of the automatic detection of traffic signs difficult such as changeable light conditions which are difficult to control (lighting varies according to the time of the day, season, cloud cover and other weather conditions) Ref. [14]. Presence of other objects on the road (traffic signs are often surrounded by other objects producing partial occlusions, shadows, etc.) also hinders the detection process Ref. [54-56].
The research takes a precarious turn when considering the possibilities that can cause false positives since the algorithm has to take camera distance and view angle of the recorded image along with possible deformation caused by external factors to the signs’ appearance into account.
Hence, any robust TSDR solution must provide straightforward results that are not affected by perspective distortion, lighting changes, partial occlusions or shadows [3]. Ideally, the solution should also provide additional information on the lack of visibility, poor conditions and poor placement of traffic signs. In Section III, the methods applied in various TSDR solutions are going to be discussed. An in-depth analysis of the proposed frameworks for TSDR and the experimental results of some frameworks are going to discussed in Section IV and IV respectively
-
II. Analysis Aspects of Traffic Sign Detection
And Recognition
Generally, TSDR can be divided into four phases: Video/Image/Frame Acquisition, Preprocessing,
Detection and Recognition. Among them, Detection and
Recognition is the most crucial part of the solution
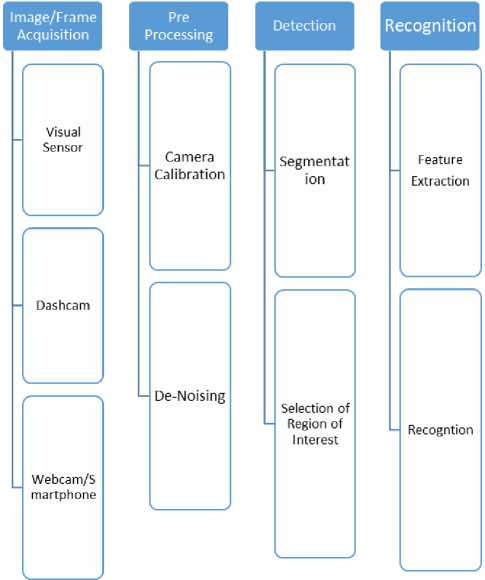
Fig.1. General framework followed in Traffic Sign Detection and Recognition
All TSDR generally follows the framework described in Figure 1. One of the currently followed frameworks is deep learning based framework such as Convolutional Neural Network (CNN) Ref.[29, 30, 31].CNN pioneered the way parallel programming with high-end GPU which provides high efficiency in real time application Ref.[29].In the field of Bengali based TSDR progress is only little. The existing state of earth frameworks is not feasible for real-time implementation.
From experimental results, we can see that CNN produce a much greater result if the datasets increases which result in need of memory spaces. Shortage of public dataset is also a huge problem, for this reason, all TSDR are limited to only certain country's traffic sign.
-
III. Review based on Methods
A comprehensive review of the common methods used in TSDR solutions as represented in the image below is the scope of this section.
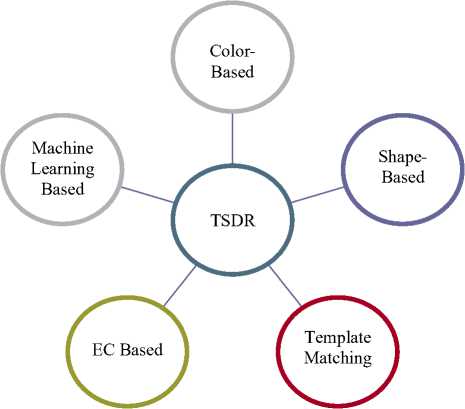
Traffic Sign detection using color is based on the five typical colors defined in standard traffic signs (red, blue, yellow, white and black). Robust color segmentation especially considering non-homogeneous illumination is given priority, since errors in segmentation may be propagated in the following steps of the system.
Color is usually perceived as a combination of three primary colors: Red, Green, Blue is also known as RGB. From RGB other color transformations such as HSV, YUV and CIECAM97 can be extrapolated using linear and non-linear transformation Ref. [58]. RGB is the most commonly used method for any type of display system and photos acquired by digital camera Ref. [59]. The drawbacks of using RGB color space in segmentation includes the complexities caused by the 3D nature of the system and the high correlation present between color components. The latter results in the variation of ambient light intensity, affecting the RGB components by shifting the cluster of colors towards the white or the black corners. Therefore segmenting an object using RGB space using the same set of thresholds will not be possible under varying lighting conditions.
To reduce intensity dependency another color space has been introduced known as HSV. HSV stands for Hue, Saturation, and Value. Since the HSV color space is less sensitive to variable lighting conditions, many researchers considered using this method for traffic sign segmentation. For instance, Paclik et al. Ref. [1] used this color space due to its similarity to human perception of colors. The hue channel of HSV color space was thresholded by Malik et al. Ref. [9] for color segmentation of red traffic signs. Segmentation was done by Shadeed et al. Ref. [13] by implementing the U and V chrominance channels of YUV space where "U" is regarded as positive and "V" as negative for red colors. The hue channel of HSV color space, in combination with YUV space information, was used to segment red colored traffic signs. Gao Et Al. Ref. [15] applied a quadtree histogram method to segment the image based on the hue and chroma values of the CIECAM97 color model. The CIECAM97 color model consisting of hue and chroma values were used by Ref. [15] to segment images implementing the quad-tree histogram method. Recently in digital images and video streams, another color space named YCbCr is frequently used. Y represents the luminance component which indicates the light intensity of the color. Cr and Cb are the chrominance components of which Cb is the blue and Cr is the red component relative to the green component respectively. These components are less sensitive to the human eyes. Dean and Jabir in [40] used RGB to YCbCr o thresholding based on red and blue color of the traffic sign.
Traffic signs are mostly designed and constructed using basic shapes like circles, triangles, pentagons etc. to make it easily visible. But similarly shaped objects also exist in the surroundings that are not traffic signs. Traffic signs are prone to physical damage and being obstructed from view. The size of traffic signs compared to its real size depends on factors such as the distance between the camera lens and traffic sign. The camera view might also be disoriented vertically or horizontally. Moreover, factors like small object size of a traffic sign in images and slanted angle of view create difficulties in the detection phase due to change in aspect ratio. Small roughly distinguishable traffic signs in images make it rather difficult to approximate contours and so robust edge detection and recognition algorithms are necessary.
In order to overcome the problems of color based and shape based detection, some hybrid methods have been proposed. Color segmentation followed by shape analysis is usually done in these hybrid methods Oruklu et al. Ref. [50]. At first, the color segmentation is done in the HSV color space and then boundary boxes are inserted for all the regions detected through the color segmentation. The traffic sign is detected by using the features of the bounding boxes such as mean color, size, and a number of pixels enclosed in the boundary box. Zheng et al Ref. [51] used both the color and shape information to detect the traffic signs. The image is color segmented by using RGB color space and then shape analysis is performed by using the Douglass-Peucker algorithm which is a contour approximation technique and the detection is based on the number of object boundaries which enables it to detect signs despite having some geometric distortions.
TSDR uses Template Matching based algorithms that search for existing similar training samples which are then stored in a database as unknown Regions of Interest (ROIs). Template matching is performed on these ROIs to recognize traffic signs. A robust method was mentioned in Ref. [60] where Template matching was performed for simultaneous detection and recognition. The input was compared with differently shaped sign templates extracted from various ROIs and then were grouped together under a tree structure based on their similarity.
Machine Learning methods in the Traffic Sign Detection and Recognition are the most commonly used. Machine Learning methods can be categorized into three types: Supervised Learning, Unsupervised Learning, and Reinforcement based learning as shown in Figure 2 Ref.[65].
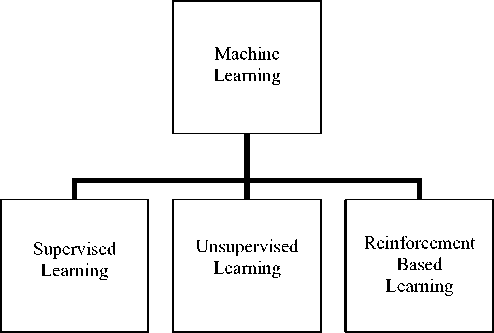
Fig.3. Machine Learning Paradigms
Among the machine learning methods supervised learning methods are the most conventional in the proposed TSDR systems. Supervised learning methods build/learn a model from given datasets then predicts a response to future instances Ref. [52]. Classifier models are created to train feature vectors that can distinguish between different traffic signs in supervised learning paradigm.
Support Vector Machine (SVM) is a supervised machine learning method which classifies points to one of two disjoint half-spaces Ref.[68]. Authors in Ref. [35] uses multilevel SVM to overcome the binary classification. Multi-level SVM is used to recognize different shapes of signs. Ref.[36] and Ref.[39] used linear SVM for recognition purpose. SVM’s advantage is: it’s performance increase while working with non-linear boundary based on a kernel and it works well with high dimensional data. But SVM is prone to overfitting which is a major flaw.
Artificial Neural Network is recently being used in TSDR solutions. ANN gives a major advantage in case of Real Time TSDR because of its fast response and computational time. But during overfitting reduction, it increases computational time. Among ANN multi-layer perceptron (MLP) is most frequently used in TSDR. A multi-layer perceptron, also referred to as MLP, is a feedforward artificial neural network and it consists of multiple layers, which are fully connected to each other Ref.[71]. In other words, every single neuron in a multilayer perceptron is linked to the neurons in the next layer. The advantages of Multi-layer Perceptron are Capability to learn non-linear models. Capability to learn models in real-time (online learning) using partial fit. The disadvantages of Multi-layer Perceptron (MLP) is it requires tuning a number of hyperparameters such as the number of hidden neurons, layers, and iterations and sensitive to feature scaling. In [25] A road sign image which contains 50 × 50 pixels is proceed to classification sub-module, and Multi-Layer Perceptron (MLP) network [4] has been created and trained to classify the type of road signs in this sub-module. The input signal transmits through the network in a forward path, on a layer-bylayer basis. The network has been trained on 300 sets of training patterns taking 75 for each type of road sign and 200 test patterns taking 50 images of each road sign. The network has 7500 input neurons and 4 output neurons. The hidden layer is 5. Authors in Ref. [26, 28, 38, 36] MLP is used in recognition process.
Recently Convolutional Neural Network has become a very popular method in the field of real-time Automated Driving Assistance System. One of the cons of CNN is a large number of datasets which increases training time. But it is also an advantage as the large the dataset the more accurate is the result. Also increase in layer means more features are added to training set which allows CNN to work with high-resolution images. Also, CNN possess complicates structures.
In Ref.[30] combination of two architectures (AlexNet AND GoogLeNet) of CNN has been used. Authors in [31] used Faster Region based CNN(R-CNN). The Faster R-CNN network [49] is composed of two modules: Region Proposal Network (RPN) and Fast R-CNN.
RPN produces a set of bounding box object proposals of the input image which Fast R-CNN classifies into the set of predefined categories. Fast R-CNN is highly efficient since it shares convolutions across individual proposals. It also performs bounding box regression to further refine the quality of the proposed regions.
Decision Tree is a supervised learning model for classification and regression. Decision trees are favored because it doesn’t require any domain knowledge, parameter setting and can handle multidimensional data with fast speed and good accuracy. Among Decision Tree methods Random Forest is used in most proposed solution for traffic sign recognition. The main reason behind using Random Forest is the ability for multi-class detection in contrast to common boosting detectors A Random Forest consists of several independent decision trees arranged in a forest. A majority vote over all trees leads to the final decision. Random forests are trained in a supervised way. Authors in [42] used an Error Correcting Output Code also known as ECOC framework, on the Random forest which increases the efficiency.
Adaptive Boosting or AdaBoost is a combination of multiple learning algorithms that can be utilized for regression or classification [72]. In Ref. [24] AdaBoost is used on static images in a different environment to detect text based recognition. In [42] an evolutive Adaboost method has been introduced for illumination invariance and to enhance the recognition rate.
Evolutionary techniques mostly involve meta-heuristic optimization algorithms. The basic evolutionary algorithms (EA) encompass genetic algorithm, genetic programming, and evolution strategies. EA shares the common theme of optimization performed on a population of potential solutions applying techniques inspired by biological evolution to produce better approximations to a solution. Genetic Algorithm is the most used technique of Evolutionary Computation, it is a fast and accurate algorithm which can outperform Neural Networks and SVM in some particular tasks. It is therefore very useful in TSDR solutions.
-
IV. Review based on Frameworks
Most of the TSDR solutions usually follow the framework mentioned in Figure 1. Based on this general framework up to now many frameworks have been proposed and implemented. In this section, some of these existing frameworks from Table 1 are going to be discussed along with their advantages and some possible issues.
In Ref. [25] it was observed that salt and pepper noise reduction in pre-processing, HSV color based segmentation in detection part and Multi-Layer Perceptron (MLP) in recognition phase were used respectively. Even though conversion to HSV, noise reduction etc. in pre-processing minimalizes error, there can be a change in physical color of the object i.e. Traffic Sign in reality which will affect Color Segmentation after detection to HSV.
Ref [26] uses fuzzy logic on color based segmentation, SURF descriptor for feature extraction and MLP for recognition. For using SURF descriptor, Traffic signs are detected and classified after extraction based on fuzzy rules segmentation which provides robustness and also gives a very high accuracy for static detection and recognition. But lack of pre-processing and only using fuzzy techniques with logical AND based results may cause some errors. In Ref. [28] a hybrid method utilizing the combination of RGB color space with shape and size constraint analysis based segmentation is used in detection phase along with auto-associative neural network for sign identification. This framework produces highly accurate results only in static images. But in case of real-time implementation with the change of orientation, weather conditions, lighting and also the speed of the vehicle will decrease its accuracy.
The Framework in Ref. [29] uses multiple HSV color space thresholding with Hough transformation algorithm to detect traffic signs and then uses LeNet-5 Model, a deep convolutional algorithm to recognize the extracted ROIs. It is inefficient for a real-time solution due to its parallel programming through high powered GPU. As for using two separate segmentation on the same frame, overlapping of ROIs produce a redundant result and also increases computational cost. The accuracy is dependent solely on weather and illumination conditions along with the number of datasets used to train the algorithm. Also as LeNet-5 is constrained by computational resources it is not available for higher resolution frames. In case of Ref. [30] a framework using HIS combined with selective search algorithm in detection phase and also AlexNet and GoogLeNet, two convolutional Neural Network Algorithm for recognition was theorized. Selective Search is used mainly for its ability to process at a high speed during an exhausting search along with the robustness it provides for distinguishing objects based on size, color, texture and region similarity. AlexNet and GoogLeNet convolution network are used for attaining accuracy on recognition. Uršič et al. Ref. [31] used data augmented enriched dataset and Fast R-CNN Ref. [49] for both detection and recognition phase. Region-Based Convolutional Neural Networks(R-CNN) and Region Proposal Network Ref. [49] are highly efficient since they share convolutions across individual proposals. They also perform bounding box regression to further enhance the quality of the proposed regions. It enables fast and rapid detection of TSDR solutions. Even though it is very fast it is a three-stage training phase for R-CNN and it requires a large amount of space along with sufficient GPU power. Also in some cases, the overlapping of ROIs increase the computational time.
Table 1. Existing and Proposed Frameworks for Traffic Sign Detection and Recognition Solution
|
Major Steps Used |
Ref. |
Advantages |
Possible Issues/Disadvantages |
|
Color Feature and Multilayer Perceptron Neural Network |
[25] |
• Less reactive to illumination changes. |
|
|
Fuzzy Color Segmentation, Filtering, Speeded Up Robust Features(SURF) Extraction, Multilayer Perceptron Neural Network |
[26] |
|
|
|
Shape &Size Constraints, Auto-Associative Neural Network |
[28] |
• Highly accurate recognition rate in static images |
• Accuracy reduced in a shadowed environment. |
|
Hybrid Method(HSV segmentation + Hough Transformation), LeNet -5 Model |
[29] |
• Parallel Programming for high powered GPUs enables the validation of signs in real time efficiently. |
|
|
Selective Search Detection, Convolutional Neural Network Learning, and Recognition(CNN) |
[30] |
• Faster Region of Interest extraction. |
|
|
Data Augmentation, Faster Region Based Convolutional Neural Networks (R-CNN) |
[31] |
|
|
|
Coarse classification, Fine classification- Dense-SIFT, LBP, Gabor filter fusion, a fusion of SVM and Random Forests(RF) |
[33] |
• Fusion of different methods increases the rate of success. |
• Low resolution and bad illumination situations along with the specific disadvantages of the different classifiers and feature extractors. |
|
HSI color thresholding, Distance to Borders (DtBs), HOG, LSS, Random Forest. |
[34] |
|
|
|
8 bit Modified Census Transform, 4 stage based cascade AdaBoost classifier, Multilevel SVM |
[35] |
|
• Less accuracy compared to other frameworks. |
|
Bilateral Chinese Transform (BCT), Vertex and Bisector Transform (VBT), HOG feature, Linear SVM, MultiLayer Perceptron |
[36] |
• BCT and VBT reduce the ROI. |
|
|
Color enhancement (red), Chromic filter, Morphological filter. HOG Featured SVM, Random forest classification |
[37] |
|
• Performance reduces with smaller training sets. |
|
Morphological Classification. Principle Component Analysis with MLP. |
[38] |
• Simple and Faster implementation with higher accuracy |
• Failure to recognize damaged, occluded signs |
|
Fast Fourier Transformation. Normalization of ROI, HOG based extraction, Linear SVM |
[39] |
• Reduces computational time of detection. |
|
|
YCbCr Color segmentation, shape filtering based on template matching, Multi-layer Perceptron Neural Networks |
[40] |
• Faster Detection. |
• Shape and color based detection rate can be reduced due to occlusion and distortion. |
|
HSV color segmentation, Hough Transformation, Genetic algorithm based Template matching |
[41] |
|
|
|
Evolutive AdaBoost, Forest Error-Correcting Output Codes(ECOC) |
[42] |
|
• Requires huge computational time. |
Table 2. Experimental Result of Proposed methods for traffic sign detection and recognition
References Traffic sign detection based on color segmentation of obscure image candidates: a comprehensive study
- P. Paclı́k, J. Novovičová, P. Pudil and P. Somol, "Road sign classification using Laplace kernel classifier", Pattern Recognition Letters, vol. 21, no. 13-14, pp. 1165-1173, 2000.
- M. Prieto and A. Allen, "Using self-organizing maps in the detection and recognition of road signs", Image and Vision Computing, vol. 27, no. 6, pp. 673-683, 2009.
- De la Escalera, J. Armingol and M. Mata, "Traffic sign recognition and analysis for intelligent vehicles", Image and Vision Computing, vol. 21, no. 3, pp. 247-258, 2003.
- M.Benallal and J. Meunier, "Real-time color segmentation of road signs", CCECE 2003 - Canadian Conference on Electrical and Computer Engineering. Toward a Caring and Humane Technology (Cat. No.03CH37436), vol. 3, pp.:1823- 1826, 2003.
- M. M. Zadeh, T. Kasvand, and C. Y. Suen, "Localization and recognition of traffic signs for automated vehicle control systems", In Proc. SPIE Vol. 3207, Intelligent Transportation Systems, pages 272–282, 1998.
- A. de la Escalera, L. Moreno, M. Salichs and J. Armingol, "Road traffic sign detection and classification", IEEE Transactions on Industrial Electronics, vol. 44, no. 6, pp. 848-859, 1997.
- C. Bahlmann, Y. Zhu, Visvanathan Ramesh, M. Pellkofer and T. Koehler, "A system for traffic sign detection, tracking, and recognition using color, shape, and motion information", IEEE Proceedings. Intelligent Vehicles Symposium, 2005., pp. 255-260, 2005.
- S. Maldonado-Bascon, S. Lafuente-Arroyo, P. Gil-Jimenez, H. Gomez-Moreno and F. Lopez-Ferreras, "Road-Sign Detection and Recognition Based on Support Vector Machines", IEEE Transactions on Intelligent Transportation Systems, vol. 8, no. 2, pp. 264-278, 2007.
- R. Malik, J. Khurshid and S. Ahmad, "Road Sign Detection and Recognition using Color Segmentation, Shape Analysis, and Template Matching", 2007 International Conference on Machine Learning and Cybernetics, vol. 6, pp. 3556-3560, 2007.
- H. Huang, C. Chen, Y. Jia and S. Tang, "Automatic Detection and Recognition of Circular Road Sign", 2008 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, pp. 626–630, 2008.
- P. Wanitchai and S. Phiphobmongkol, "Traffic Warning Signs Detection and Recognition Based on Fuzzy Logic and Chain Code Analysis", 2008 Second International Symposium on Intelligent Information Technology Application, pp. 508- 512, 2008.
- K. C.G., L. Prabhu, A. V. and R. K., "Traffic Sign Detection and Pattern Recognition Using Support Vector Machine", 2009 Seventh International Conference on Advances in Pattern Recognition, pp. 87- 90, 2009.
- W. Shadeed, D. Abu-Al-Nadi, and M. Mismar, "Road traffic sign detection in color images", 10th IEEE International Conference on Electronics, Circuits, and Systems, 2003. ICECS 2003. Proceedings of 2003, vol. 2, pp. 890 - 893, 2003.
- S. Vitabile, G. Pollaccia, G. Pilato and E. Sorbello, "Road signs recognition using a dynamic pixel aggregation technique in the HSV color space", Proceedings 11th International Conference on Image Analysis and Processing, pp. 572- 577, 2001.
- X. Gao, L. Podladchikova, D. Shaposhnikov, K. Hong and N. Shevtsova, "Recognition of traffic signs based on their color and shape features extracted using human vision models", Journal of Visual Communication and Image Representation, vol. 17, no. 4, pp. 675-685, 2006.
- P P. Paclík and J. Novovičová, "Road Sign Recognition without Color Information", in 6th Annual Conference of the Advances School for Computing and Imaging Conference, ASCI 2000, Belgium, 2000, pp. 84-90.
- G. Loy and N. Barnes, "Fast shape-based road sign detection for a driver assistance system," 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), 2004, pp. 70-75 vol.1.
- S. Chakraborty and K. Deb, "Bangladeshi road sign detection based on YCbCr color model and DtBs vector," 2015 International Conference on Computer and Information Engineering (ICCIE), Rajshahi, 2015, pp. 158-161.
- Z. Malik and I. Siddiqi, "Detection and Recognition of Traffic Signs from Road Scene Images," 2014 12th International Conference on Frontiers of Information Technology, Islamabad, 2014, pp. 330-335.
- C. Liu, F. Chang, Z. Chen and D. Liu, "Fast Traffic Sign Recognition via High-Contrast Region Extraction and Extended Sparse Representation," in IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 1, pp. 79-92, Jan. 2016.
- S. Maldonado-Bascon, S. Lafuente-Arroyo, P. Siegmann, H. Gomez-Moreno and F. J. Acevedo-Rodriguez, "Traffic sign recognition system for inventory purposes," 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, 2008, pp. 590-595.
- J. Greenhalgh and M. Mirmehdi, "Real-Time Detection and Recognition of Road Traffic Signs," in IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 4, pp. 1498-1506, Dec. 2012.
- S. Maldonado-Bascon, S. Lafuente-Arroyo, P. Gil-Jimenez, H. Gomez-Moreno and F. Lopez-Ferreras, "Road-Sign Detection and Recognition Based on Support Vector Machines," in IEEE Transactions on Intelligent Transportation Systems, vol. 8, no. 2, pp. 264-278, June 2007.
- Sin-Yu Chen and Jun-Wei Hsieh, "Boosted road sign detection and recognition," 2008 International Conference on Machine Learning and Cybernetics, Kunming, 2008, pp. 3823-3826.
- M. A. A. Sheikh, A. Kole and T. Maity, "Traffic sign detection and classification using color feature and neural network," 2016 International Conference on Intelligent Control Power and Instrumentation (ICICPI), Kolkata, 2016, pp. 307-311.
- Abedin, P. Dhar, M. K. Hossenand and K. Deb, "Traffic sign detection and recognition using fuzzy segmentation approach and artificial neural network classifier respectively," 2017 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox's Bazar, 2017, pp. 518-523.
- V. Ngoc Hanh and D. Park, "Traffic Sign Detection with Color Probability Map Using Artificial Neural Networks", International Journal of Applied Engineering Research, vol. 11, no. 21, pp. 10655-10658, 2016.
- Supreeth H. S. G and C. M. Patil, "An approach towards efficient detection and recognition of traffic signs in videos using neural networks," 2016 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, 2016, pp. 456-459.
- S. Jung, U. Lee, J. Jung and D. H. Shim, "Real-time Traffic Sign Recognition system with deep convolutional neural network," 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi'an, 2016, pp. 31-34.
- S. C. Huang, H. Y. Lin and C. C. Chang, "An in-car camera system for traffic sign detection and recognition," 2017 Joint 17th World Congress of International Fuzzy Systems Association and 9th International Conference on Soft Computing and Intelligent Systems (IFSA-SCIS), Otsu, 2017, pp. 1-6.
- P.Uršič, D. Tabernik, R. Mandeljc and D. Skočaj, "Towards large-scale traffic sign detection and recognition", in 22nd Computer Vision Winter Workshop, Retz, Austria, 2017.
- Z. Chen, X. Huang, Z. Ni and H. He, "A GPU-based real-time traffic sign detection and recognition system," 2014 IEEE Symposium on Computational Intelligence in Vehicles and Transportation Systems (CIVTS), Orlando, FL, 2014, pp.1-5.
- Y. Ma and L. Huang, "Hierarchical Traffic Sign Recognition Based on Multi-feature and Multi-classifier Fusion", Proceedings of the First International Conference on Information Science and Electronic Technology, 2015.
- A. Ellahyani, M. Ansari, I. Jaafari and S. Charfi, "Traffic Sign Detection and Recognition using Features Combination and Random Forests", International Journal of Advanced Computer Science and Applications, vol. 7, no. 1, pp. 686-693, 2016.
- K.Lim, H. Byun and Y. Choi, "A Real-time Traffic Sign Recognition System Based on Local Structure Features", in The 19th International Conference on Image Processing, Computer Vision, & Pattern Recognition, 2015, pp. 65-68.
- J. H. Shi and H. Y. Lin, "A vision system for traffic sign detection and recognition," 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, 2017, pp. 1596-1601.
- F. Zaklouta and B. Stanciulescu, "Real-time traffic sign recognition in three stages", Robotics and Autonomous Systems, vol. 62, no. 1, pp. 16-24, 2014..
- H. Thanh, "Morphological Classification for Traffic Sign Recognition", Electrical and Electronic Engineering, vol. 4, no. 2, pp. 36-44., 2014.
- L. Chen, Q. Li, M. Li and Q. Mao, "Traffic sign detection and recognition for intelligent vehicle," 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, 2011, pp. 908-913.
- H. N. Dean and K. V. Jabir, “Real Time Detection and Recognition of Indian Traffic Signs using Matlab”, International Journal of Scientific & Engineering Research, Volume 4, Issue 5, pp. 684-690, 2013.
- M. Kobayashi, M. Baba, K. Ohtani and L. Li, "A method for traffic sign detection and recognition based on genetic algorithm," 2015 IEEE/SICE International Symposium on System Integration (SII), Nagoya, 2015, pp. 455-460.
- X. Baro, S. Escalera, J. Vitria, O. Pujol and P. Radeva, "Traffic Sign Recognition Using Evolutionary Adaboost Detection and Forest-ECOC Classification," in IEEE Transactions on Intelligent Transportation Systems, vol. 10, no. 1, pp. 113-126, March 2009.
- M. Billah, S. Waheed, K. Ahmed and A. Hanifa, "Real Time Traffic Sign Detection and Recognition using Adaptive Neuro Fuzzy Inference System", Communications on Applied Electronics, vol. 3, no. 2, pp. 1-5, 2015.
- Soetedjo A., Yamada K. "Fast and robust traffic sign detection", Systems, man and cybernetics, vol. 2, pp. 1341-1346, 2005.
- Soetedjo A., Yamada K, "An efficient algorithm for traffic sign detection", Journal of advanced computational intelligence and intelligent informatics, vol. 10, no 3, pp. 409-418, 2005.
- S. Marsi et al., “Video Enhancement and Dynamic Range Control of HDR Sequences for Automotive Applications ” EURASIP J. Advances in Signal Processing, vol. 2007, 2007, p. 9.
- M. García Garrido, M. Sotelo and E. Martm-Gorostiza, "Fast Traffic Sign Detection and Recognition Under Changing Lighting Conditions", in 2006 IEEE Intelligent Transportation Systems Conference, Toronto, Canada, 2006, pp. 811-816.
- W. J. Kuo and C. C. Lin, "Two-Stage Road Sign Detection and Recognition," 2007 IEEE International Conference on Multimedia and Expo, Beijing, 2007, pp. 1427-1430.
- S. Ren, K. He, R. B. Girshick, and J. Sun, “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks,” in NIPS, 2015, pp. 91–99.
- E. Oruklu, D. Pesty, J. Neveux and J. E. Guebey, "Real-time traffic sign detection and recognition for in-car driver assistance systems," 2012 IEEE 55th International Midwest Symposium on Circuits and Systems (MWSCAS), Boise, ID, 2012, pp. 976-979.
- Z. Zheng, H. Zhang, B. Wang, and Z. Gao, “Robust traffic sign recognition and tracking for Advanced Driver Assistance. Systems,” 15th International IEEE Conference on Intelligent Transportation Systems (ITSC), 2012, pp. 704–709.
- Z . Omary and F. Mtenzi, "Machine learning approach to identifying the dataset threshold for the performance estimators in supervised learning," International Journal for Infonomics (IJI), vol. 3, Sept. 2010, p:314–325.
- R. Michalski, J. Carbonell, and T. Mitchell, Machine Learning: An Artificial Intelligence Approach. Morgan Kaufmann, 1986.
- S. Vitabile, A. Gentile, and F. Sorbello, "A neural network based automatic road sign recognizer," presented at The 2002 Inter. Joint Conf. on Neural Networks, Honolulu, HI, USA, 2002.
- J. Miura, T. Kanda, and Y. Shirai, "An active vision system for real-time traffic sign recognition," presented at 2000 IEEE Intelligent Transportation Systems, Dearborn, MI, USA, 2000.
- S. Vitabile, A. Gentile, G. Dammone, and F. Sorbello, "Multi-layer perceptron mapping on a SIMD architecture," presented at The 2002 IEEE Signal Processing Society Workshop, 2002.
- Bangladesh Road Transport Authority, "BANGLADESH ROAD SIGN MANUAL", Bangladesh Road Transport Authority. Available: http://www.rhd.gov.bd/Documents/ConvDocs/Road%20Sign%20Manual%20Volume-1.pdf [Accessed: 12- Dec- 2017]
- H. Cheng, X. Jiang, Y. Sun and J. Wang, "Color image segmentation: advances and prospects", Pattern Recognition, vol. 34, no. 12, pp. 2259-2281, 2001.
- H. Fleyeh, "Traffic and Road Sign Recognition", Ph.D., Napier University, 2008.
- A. Ruta, Y. Li, and X. Liu, “Real-Time Traffic Sign Recognition from Video by Class-Specific Discriminative Features,” Pattern Recognition, vol. 43, no. 1, 2010, pp. 416–30.
- "ADAC: BMW has best traffic-sign recognition", automotiveIT International, 2010 [Online]. Available: http://www.automotiveit.com/news/adac-bmw-has-best-traffic-sign-recognition/. [Accessed: 23- Jan- 2018]
- J. Levinson et al., "Towards fully autonomous driving: Systems and algorithms," 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, 2011, pp. 163-168.
- J. Markoff, "Google Cars Drive Themselves, in Traffic", The New Work Times, 2010.
- Geonovum, "Self-Driving Vehicles & Geo-Information", Geonovum [Online]. Available: https://www.geonovum.nl/sites/default/files/Self-DrivingVehiclesReport.pdf. [Accessed: 21- Feb- 2018]
- Michalski, Ryszard S., Carbonell, Jamie G. and Mitchell, Tom. M. Machine learning: An Artificial Intelligence Approach. Morgan Kaufmann, 1985.
- H. Bay, A. Ess, T. Tuytelaars, and L. V. Gool, "SURF: Speeded up robust features," Computer Vision and Image Understanding, vol. 110, no. 3, pp. 346–359, 2008
- D. Lowe, “Distinctive image features from scale-invariant key points, “International Journal of Computer Vision, vol. 60, no. 2, pp. 91–110, November 2004.
- L. Auria and R. Moro, "Support Vector Machines (SVM) as a Technique for Solvency Analysis", SSRN Electronic Journal, 2008.
- "Convolutional Neural Networks - Convolutional Neural Networks for Image and Video Processing - TUM Wiki", Wiki.tum.de, 2018. [Online]. Available: https://wiki.tum.de/display/lfdv/Convolutional+Neural+Networks. [Accessed: 27- Feb- 2018]
- M. O. Rahman, F. A. Mousumi, E. Scavino, A. Hussain and H. Basri, "Real time road sign recognition system using artificial neural networks for bengali textual information box," 2008 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 2008, pp. 1-8
- R. Gonzalez and R. Woods, Digital image processing. Upper Saddle River, N.J.: Prentice Hall, 2002.
- Y. Freund and R. E. Schapire, "Experiments with a new boosting algorithm," in International Conference on Machine Learning, 1996, pp. 148–156.
