Tree-serial parametric dynamic programming with flexible prior model for image denoising

Author: Thang Pham Cong, Kopylov Andrei Valerievich
Journal: Компьютерная оптика @computer-optics
Section: Обработка изображений, распознавание образов
Article in issue: 5 т.42, 2018.
Free access
We consider here image denoising procedures, based on computationally effective tree-serial pa-rametric dynamic programming procedures, different representations of an image lattice by the set of acyclic graphs and non-convex regularization of a new type which allows to flexibly set a priori pref-erences. Experimental results in image denoising, as well as comparison with related methods, are provided. A new extended version of multi quadratic dynamic programming procedures for image denoising, proposed here, shows an improved accuracy for images of a different type.
Image denoising, dynamic programming, bayesian optimization, markov random fields (mrfs), gauss-seidel iteration method
Short address: https://sciup.org/140238485
IDR: 140238485 | DOI: 10.18287/2412-6179-2018-42-5-838-845
Text of the scientific article Tree-serial parametric dynamic programming with flexible prior model for image denoising
A low-level processing is an important preliminary step in almost every image analysis system. Images may be corrupted by a disruptive noise during acquisition and transmission process. Thus, one of the main objectives of this low-level processing is to suppress noise, taking into account the essential requirement to preserve the local image structure for accurate and efficient subsequent analysis.The practical importance of noise suppression for image processing and computer vision keeps up a constant attention from the scientists. Many methods for edgepreserving image denoising [1 – 7] have been proposed in the literature, but none of them can simultaneously achieve both sufficient accuracy to provide a highly reliable data and computational speed to process super-resolution or dynamic images at a practice-relevant time. Therefore, denoising is still a challenging problem.
We apply here Bayesian approach as, perhaps, one of the most conceptually attractive and popular approaches to image processing. In the Bayesian framework, the problem of image denoising can be expressed as the problem of estimation of a hidden Markov component X = ( x t , t ∈ T ), T =( t = { t 1 , t 2 }, t 1 = 1... N 1 , t 2 = 1... N 2 ) of a two-component ( X , Y ) Markov random field (MRF), where the analyzed noisy image Y = ( y t , t ∈ T ) plays the role of the observed component.
In the case of a singular loss function, the Bayesian estimation of the component X can be found as a maximum a posteriori probability (MAP) estimation. It leads to the minimization problem of the objective function of a special kind related to the equivalent representation of Markov random fields in the form of Gibbs random fields in accordance with Hammersley–Clifford Theorem [8]. This function is often called the Gibbs energy function [9] and is formed as a sum of elementary objective functions of one or two variables associated, respectively, with nodes and edges of the pixel neighborhood graph.
The undirected graph that reflects occurring of pairs of variables in the given pairwise separable objective function is called the adjacency graph. Functions of one or two variables represent Gibbs potentials on cliques of adjacency graph and will be called node and edge functions correspondingly.
The edge functions are used to define the prior model of a hidden field X and have a crucial influence on the edge-preserving properties. Different types of prior assumptions result in different types of edge functions. Various non-convex pairwise edge functions are considered in the literature [9-11] for preserving significant differences of values in the corresponding pairs of adjacent elements and smoothing the other differences. Convex edge-preserving pairwise potential functions were proposed to avoid the numerical involutions arising with non-convex regularization. However, non-convex regularization offers the best possible quality of image reconstruction with neat and exact edges [10]. One of the main problems in these approaches is the high computational complexity of corresponding minimization procedures which can hardly be applied to high-resolution images.
In this work, we develop parametric procedures for edge-preserving in image denoising based on dynamic programming (DP) principle, which consists in a recurrent decomposition of the initial problem of minimizing multivariate function into a succession of partial problems, each of which consists in minimizing a function of only one variable. These functions of one variable are called Bellman functions [12].
When the pairwise Gibbs potentials are selected as a minimum of a finite set of quadratic functions, and node functions are in quadratic form, the Bellman functions at each step of the dynamic programming will have a form of a minimum of a finite set of quadratic functions [11, 13, 14]. This lets us keep in memory and recalculate the parameters of these quadratic functions only, instead of using discrete variables and calculation of the DP table, and therefore to reduce the overall computational time.
If the adjacency graph is a tree, then we have a version of a serial dynamic programming procedure [15] namely the tree-serial dynamic programming [16]. For images, the general form of the objective function will be the pairwise separable function with lattice-like adjacency of variables, so the tree-serial DP cannot be applied immediately to the image processing problems.
In our previous works, two different forms of tree-like representation of a rectangular lattice were utilized: treelike approximation by the succession of simple trees [12], and the full set of possible acyclic adjacency graphs [17, 18]. The procedures can effectively remove an additive white Gaussian noise with high quality. Nevertheless, in both methods, the final decision for each variable is made based on a separate graph or the set of graphs. This can lead to inconsistency of the solution with the initial set of prior preferences. To overcome this obstacle, we propose an extended version of a multi quadratic dynamic programming procedure for image denoising based on the partitioning of the initial lattice on the non-overlapping set of chain-like graphs and iterative evaluation of separate groups of goal variables related to these graphs in accordance to the Gauss-Seidel method.
The experimental results show that the method usually converges within five-six iterations and exhibits the clear improvements in the denoising quality. Additionally, we have provided a comparison of the proposed approach with the other procedures for edge-preserving image denoising such asnonlinear total variation (TV) [4], modified Perona– Malik (MP-M) [7], Beltrami [19].
Related work
Within the Bayesian framework, the final decision about the hidden component X = ( x t , t e T) of a two-component ( X , Y ) MRF is based on posterior probability density distribution. The principle of average risk minimization in combination with singular loss function leads to the wide-spread decision rule, known as maximum a posteriori probability (MAP) estimation [9].
It is important that the pixel grid of an image is naturally supplied by the binary neighborhood relation, which turns it into a graph. The simplest case of such a graph is a rectangular lattice G = ( T×T ) (Fig. 1) which considers pairwise relations only and therefore has the clique number equal to two. In this case, the objective function for MAP estimation in the form of so-called Gibbs energy [9], will be the sum of functions of no more than two variables namely, the node and the edge ones [14]:
J ( X | Y ) \ u t ( x 1 1 Y ) + £ Y t ‘, t-( x t ‘ , x t-) . (1) t e T ( t ', t ")
In the papers [11, 14] we proposed to use a non-convex type of pairwise potential functions, that allow to flexibly set a priori preferences, using distinctpenalty coefficients for various ranges of differences between the values of adjacent image elements:
Y t - ( x t - , xf ) = u min[ Y (1) ( x t - , xt " ), • •
Y t ^’ 1) ( x t - , x t - ), A 2 ]
,
,
where A , u - smoothing parameters, L - a number of quadratic functions,
Y t‘) ( x t - , x t -- ) = X ( i ) ( x t - - x t -- ) 2 + d ( i ) -quadratic functions with parameters X (i ) и d ( i ) , i = 1,..., L -1, ( t' , t ") e G .
These pairwise potential functions have the desired properties for the conservation of abrupt changes in the analyzed data.
Node functions are chosen in the quadratic form:
V t ( x t ) = ( x t - y t ) 2 .
When the pairwise Gibbs potentials are selected as a minimum of a finite set of quadratic functions (2), and node functions are in quadratic form (3), the Bellman functions at each step of the dynamic programming will also be a minimum of a finite set of quadratic functions. Therefore, each Bellman function belongs to the same parametric family, which leads to the parametric procedure called multi quadratic dynamic programming procedure (MQDP) [11, 13, 14].The procedure searches for the minimum of theobjective function (1) in two passes according toforwardand backward recurrent relations [13, 14].
In the case of the graph G is a chain, the forward recurrent relation the Bellman function will be defined [12] in the following way:
Jt (xt) = vt (xt) + min Г Yt (xt-1, xt) + Jt-1 (xt-i)l, (4) xt-1L t = 2,^N, .J1(x1) = V1(x1).
Let F’t (xt) = min pyt (xt-1, xt) + Jt-1(xt-1)!
xt-1 LJ be a partial Bellman function. We have:
Jt ( x t ) = V t ( xt ) + 7^ ( x t ).
The global minimum of the Bellman function (4) of the last variable min xN J N ( x N ) coincides with the global minimum of the total objective function for all variables:
xc n = arg min x N J n ( xn ).
The other variables can be found by applying backward recurrent relation [12]:
x t - 1 ( x t ) = arg min p y t ( x t - 1 , x t ) + J t - 1 ( x t - 1 ) ] .
xt - 1
The amount of quadratic functions grows at each step of the forward move but not all of them take part in forming the minimum. These functions can be dropped using simple enough procedure that considers the position of the minimum point and the points of intersection of quadratic functions with each other (Algorithm 1).
It was proven, that in the case of signal processing the number of quadratic functions Lt , that are required for representation of a Bellman function Jt ( x ), generally, is not increased by more than one at each step.
For images, the general form of the objective function will be the pairwise separable function with lattice-like
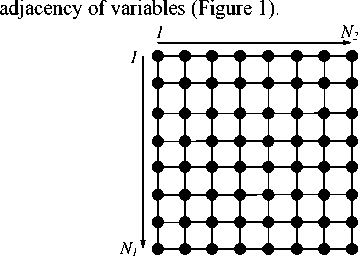
Fig. 1. Neighborhood graph on the set of data array elements: a rectangular lattice n2
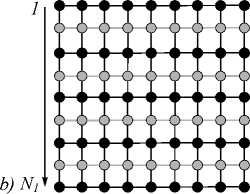
A lattice is not a chain, and Bellman’s DP principle cannot be immediately applied to solving such optimization problems. There are, at least, four ways [16, 17] of using computational advantages of the tree-serial DP for optimization of an objective function with a lattice-like graph of variable adjacency (Figure 2).
The first, and the most often applied to various image processing problems techniqueis based on the following heuristic idea [12]. We can decompose the original lattice-like adjacency graph into several tree-like ones each of which covers, nevertheless, all the elements of the pixel grid. Respectively, instead of the overall objective function, we use several partial functions with tree-like n2
adjacency of variables to evaluate the goal variables at every single row of the original rectangular lattice.
a)
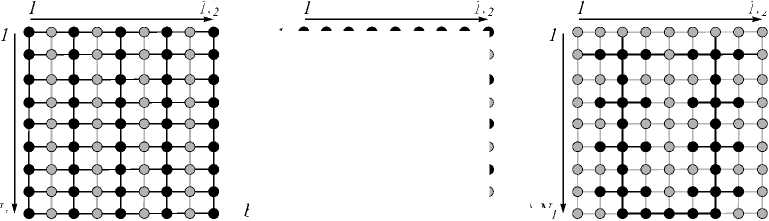
c)
Fig. 2. Examples of the decomposition of a lattice-like adjacency graph into the set of subtrees: (a) odd and even columns, (b) odd and even rows, (c) more complex decomposition into two trees
n2
For this combination of partial pixel neighborhood trees, the algorithm of finding the optimal values of the stem-node variables boils down to a combination of two usual DP procedures, dealing with single, respectively, horizontal and vertical rows of the image.
Hereinafter we will call this procedure the tree approximation algorithm.
We use a separate pixel neighborhood tree, which is defined, nevertheless, on the whole pixel grid and has the same horizontal branches as the others. The resulting image processing procedure is aimed at finding optimal values only for the hidden variables at the stem nodes in each tree. For this combination of partial pixel neighborhood trees, the algorithm of finding the optimal values of the stem-node variables boils down to a combination of two usual dynamic programming procedures, each deal with single, respectively, horizontal and vertical image rows considered as signals on the one-dimensional argument axis [20, 21]. First, such a one-dimensional procedure is applied to the horizontal rows independently for each column to find so-called marginal functions J t ( x t ) which represent the minimum of partial criterion, associated with the particular row with respect to all variables besides x t [22]: ■*■
J t ( X t ) = F t ( X t ) + F t + ( X t ) + V t ( X t ), (6)
where
F t ( x t ) = min [Y t ( x t — 1 , x t ) + F - 1 ( x t — 1 ) + v t - 1 ( x t - 1 ) ] , x t - 1
and
F t + ( x t ) = min [ Y t ( x t , x t + 1 ) + F t + 1 ( X t + 1 ) + V t + 1 ( X t + 1 ) ! .
X t + 1
Then, the procedure is applied to the vertical rows independently for each row with the only alteration: the respective marginal node functions J t ( x t ), obtained at the first step, are taken instead of the image-dependent node functions v t ( Xt ). In the case of real-valued variables x t and quadratic pairwise separable objective function, these elementary procedures applied to single horizontal and vertical rows are nothing else than Kalman filters-interpolators [23] of a special kind. Nevertheless, using MQDP for processing two-dimensional data based on the tree approximation of lattice-like neighborhood graph, the number of quadratic functions in the Bellman functions may be too large and leads to a lack of effective implementation of the procedure. In paper [11, 14] the following heuristic technique was proposed to preserve the general form of a Bellman function with several minimums. The idea was to divide the quadratic functions into groups. The number of groups is determined by the number of stored minimum values. For the separation of functions into the group, we used the featureless modification of the most popular clustering algorithms – k-means, which possesses the benefits of speed and ease of implementation [14].
In the paper [17] another way for the tree-like approximation of a lattice based on the full set of acyclic adjacency graphs was proposed. Let a hypothetical covering set of all spanning acyclic graphs (the full set) be given. For the finite set of image elements, the number of such graphs is also finite. Let us assume that all elements of the data array be roots for several unknown for us acyclic adjacency graphs from the full set. Expanding step-by-step vicinities of descendants for each element simultaneously, we can obtain its maximal vicinity including the element itself, and thus obtain the final decision for that element as a combination of decisions based on acyclic adjacency graphs from the full set. The paper describes the general probabilistic framework for dependent objects recognition.
The third way [21] consists in finding such a cut of the graph G that it gets resolved into trees G 1 , G 2 , . , G K ; G = J K = 1 GJ, G i ft G j = 0 , i * j . Then, it will be possible to apply the Gauss-Seidel iteration method to optimize the entire objective function by finding, at each step, the global optimum of each of the partial objective functions on trees G i , i = 1,..., K using tree-serial DP.
Algorithms based on the iterative reevaluation of groups of variables are significantly more robust to local extrema.
The fourth technique considers the lattice as a chain of rows, so, we can consider the variables in each row as an aggregated variable and apply the serial dynamic programming technique which is a particular case of tree-serial dynamic programming [24]. However, the Bellman functions will be functions of as many variables as long are the rows. Nevertheless, the computational complexity of such a procedure will be linear with respect to the number of rows, remaining, though, very high relative to their length. To further reduce the computational complexity of optimization, we heuristically approximate the genuine Bellman functions by appropriate pairwise separable substitutes. However, it is hard to find an appropriate approximation in the case of an edge-preserving Gibbs potentials and we cannot apply this way of approximation in our case.
Approximation algorithms allow constructing the multi quadratic dynamic programming procedures for image processing on the basis of tree-approximation and the full set of adjacency graphs [17, 25]. The second procedure utilizes an increased accuracy of the tree-like representation of a lattice based on the full set of adjacency graphs, described in [18], and let us to sufficiently simplify the recalculation of the intermediate Bellman functions.
Nevertheless, in both methods, the final decision is made based on a separate graph or the set of graphs. This can lead to inconsistency of the solution with the initial set of prior preferences. A construction of an enhanced version of MQDPbased on the partitioning of the initial lattice on the set of non-overlapping set of chain-like graphs and iterative evaluation of separate groups of goal variables related to these graphs in accordance to the Gauss-Seidel method can improve the overall accuracy of image denoising.
Iterative multi-quadratic procedure
As described in the previoussection, we can find such a cut of the graph G that it gets resolved into two trees. Then, it will be possible to apply the Gauss-Seidel iteration method to optimize the entire objective function by finding, at each step, the global optimum of each of the two-partial objective function using tree-serial dynamic programming. One of the simplest ways to divide a lattice graph into trees is to combine all the variables into two groups, namely the variables corresponding to the odd and even rows of the original lattice. Moreover, a chainlike decomposition let us skip the k-means clustering step of reducing the number of quadratic functions in the representations of Bellman functions [11, 14], as the node functions remain in quadratic form at each iteration step. This can greatly reduce the computation complexity of the procedure.
Further, in accordance with the Gauss-Seidel principle, starting from some initial approximation, we carry out optimization with respect to the first group of variables, for fixed values of the variables of the second group. Then we carry out optimization with respect to the variables of the second group, with the fixed values of the first group found in the previous step, etc. until the procedure converges, and the local minimum of the criterion is reached.
As before [11, 14, 18] we will use Algorithm 1 to select quadratic functions in the representation of the Bellman functions at each step of dynamic programming.
Algorithm 1:Reduction of a number of quadratic functions
Input: F t (i ) ( x t ), i = 1,..., K t t .
Output: F t i ) ( x t ), i = 1,..., K t 't , K t 't < K t t
-
1. In the beginning, sort by ascending values d t ( i ) of
-
2. In case of the presence of a parameter A at each step, we look for the minimum constant D t = d t (1) + u - A 2 and reject all other constants.
-
3. Discard all functions that have minimum greater than or equal to this constant
-
4. Among the remaining functions, select the function with the smallest minimum and keep it.
-
5. Find and check the necessary and sufficient condition of the intersection of quadratic functions by equations. Discard all the functions for which there is no intersection.
-
6. Among the remaining functions, select the function with the smallest minimum and keep it.
-
7. Repeat until there exist functions for which no decision on acceptance or discarding is done.
the array F t ( i ) ( x t ) .
The proposed iterative multi-quadratic procedure for image denoising is described in Algorithm 2.
However, the Gauss-Seidel method guarantees to find the global optimum only if the objective function is convex or concave. But the described above procedure can improve the quality of initial approximation obtained by means of noniterative multi quadratic dynamic programming procedure. Thus, the general algorithmic scheme of solving pairwise separable optimization problem consists in two steps. At first, the initial approximation must be found by means of the fast tree approximation algorithm, and then the iterative tree-decomposition procedure starts from this approximate solution.
To overcome the locality effect of the Gauss-Seidel search, the can change the way of decomposition as soon as the next local minimum is achieved. The computational complexity of each iteration is linear relative to the number of pixels.
The initial approximation X * = ( x * , t e T ) could be chosen in different ways. For example, we can start from the observable image itself, or use the results of treedecomposition based procedure [11] or procedure on the full set of adjacency graphs [18] as the initial approximation for faster convergence.
Algorithm 2: Iterative multi-quadratic procedure
Input: Observed image Y = ( y t , t e T ),
Initial approximation: X * = ( x * t e T ).
MaxIter, oddness = 0.
Output: Resulting image X = ( x t , t e T ).
-
o while k=1 to MaxIter do
-
o t = t + oddness
o ф t ( x t ) = ( x t - y t ) 2 + y ( x t , x * + 1 ) + y ( x t , x * - 1 )
o Calculate functions F t ( x t ) by form (5) with node function ф t ( x t )and applying Algorithm 1.
-
o Calculate marginal node functions J t ( x t ) with node functions (3) by form (6) and applying Algorithm 1 without his steps 2-3.
o x t ( x t ) = arg min J t ( x t )
-
o t = t + 2
o (X * ( x * ) = X ( x t ))
-
o oddness=1 – oddness
-
o Return X = ( x t )
If we apply Algorithm 2 to the rows of the image , then, the t + oddness = { t 1 + oddness , t 2 }, x t –1 means x t 1–1, t 2 , and x t +1 corresponds to xt 1+1, t 2 . In the same time, we can apply Algorithm 2 to the columns of the image, when e.g. the next local minimum is reached. In this case t + oddness = { t 1 , t 2 + oddness }, x t –1 means x t 1, t 2–1 , etc.
The previously proposed procedures [11, 14, 18] on the basis of MQDP use different tree-like approximations of the lattice-like pixel grid of an image. Thus, such procedures do not search the minimum of the initial criterion (1). Instead, they form a set of partial criteria that is close in some sense to the initial and find the exact global minimum of this criteria.
In contrast, the procedure described here is intended to solve the initial optimization task but it can provide a local minimum only. Therefore it has different behavior in comparison with the methods [11, 18] and can achieve better results, as evidenced by experiments.
Experimental results
All the experiments were run on a machine with Core i7 – CPU 2GHz, SDRAM 4 GB, Windows 10 (64 bit), and implemented in Matlab.
The test images are 8-bit grayscale standard images with various levels of additive white Gaussian noise. Standard deviations are chosen to be о = 10,20, 30. Denoising results are quantified by the Mean Structure Similarity Index (SSIM) and Peak to Signal Noise Ratio (PSNR) [1].
Details of quantified measurements are shown in Table 1 with different Gaussian noise levels. Results of measurements in Table 1 are averaged over multiple tests.
Table 1. Performance of various methods as measured by PSNR and SSIM corresponding to varying noise levels
|
Image |
House 128×128 |
||
|
о |
10 |
20 |
30 |
|
PSNN SSIM |
PSNR SSIM |
PSNR SSIM |
|
|
TV |
28.74 0.8279 |
26.14 0.7440 |
24.06 0.6538 |
|
M-PM |
30.37 0.8559 |
26.58 0.7337 |
24.40 0.6499 |
|
Beltrami |
30.46 0.8695 |
26.63 0.7544 |
24.38 0.6679 |
|
MQDP |
30.48 0.8708 |
26.60 0.7841 |
24.30 0.6886 |
|
Proposed Horizontal |
30.58 0.8801 |
26.68 0.7949 |
24.41 0.7418 |
|
Proposed Vertical |
30.54 0.8798 |
26.62 0.7930 |
24.33 0.7397 |
|
Proposed Combination |
30.68 0.8809 |
26.72 0.7966 |
24.43 0.7429 |
|
Image |
Lake 128×128 |
||
|
TV |
25.67 0.8947 |
23.14 0.8118 |
20.97 0.7173 |
|
M-PM |
27.52 0.9183 |
23.35 0.8192 |
21.19 0.7359 |
|
Beltrami |
26.32 0.8997 |
23.97 0.8438 |
21.61 0.7660 |
|
MQDP |
29.54 0.9220 |
24.09 0.8450 |
21.27 0.7759 |
|
Proposed Horizontal |
29.74 0.9268 |
24.37 0.8591 |
21.37 0.7923 |
|
Proposed Vertical |
29.54 0.9250 |
24.17 0.8564 |
21.37 0.8003 |
|
Proposed Combination |
29.84 0.9293 |
24.52 0.8721 |
21.79 0.8066 |
|
Image |
Parrot 128×128 |
||
|
TV |
26.06 0.8458 |
24.30 0.7984 |
22.76 0.7298 |
|
M-PM |
29.35 0.9041 |
25.90 0.7973 |
23.56 0.7072 |
|
Beltrami |
28.68 0.8919 |
25.98 0.8146 |
23.49 0.7283 |
|
MQDP |
29.64 0.8955 |
26.01 0.8380 |
23.37 0.7376 |
|
Proposed Horizontal |
29.83 0.9087 |
26.15 0.8395 |
23.51 0.7864 |
|
Proposed Vertical |
29.71 0.8977 |
26.09 0.8388 |
23.42 0.7834 |
|
Proposed Combination |
29.84 0.9177 |
26.22 0.8411 |
23.70 0.7886 |
|
Image |
Hill 256×256 |
||
|
TV |
30.30 0.8292 |
27.78 0.7409 |
25.97 0.6587 |
|
M-PM |
30.55 0.8314 |
27.88 0.7470 |
25.69 0.6464 |
|
Beltrami |
30.72 0.8402 |
28.00 0.7534 |
25.82 0.6544 |
|
MQDP |
30.69 0.8579 |
27.98 0.7610 |
26.17 0.6842 |
|
Proposed Horizontal |
30.74 0.8854 |
28.10 0.7985 |
26.32 0.7372 |
|
Proposed Vertical |
30.86 0.8804 |
28.08 0.7916 |
26.28 0.7362 |
|
Proposed Combination |
30.89 0.8865 |
28.16 0.8055 |
26.41 0.7381 |
|
Image |
F16 256×256 |
||
|
TV |
30.22 0.8775 |
26.55 0.7434 |
24.12 0.6187 |
|
M-PM |
30.29 0.8845 |
26.79 0.8005 |
24.64 0.6425 |
|
Beltrami |
30.36 0.8896 |
26.74 0.8244 |
24.87 0.6815 |
|
MQDP |
30.50 0.8913 |
26.88 0.8587 |
24.75 0.7204 |
|
Proposed Horizontal |
30.90 0.8927 |
27.13 0.8688 |
24.88 0.7334 |
|
Proposed Vertical |
30.82 0.8921 |
27.03 0.8668 |
24.86 0.7387 |
|
Proposed Combination |
31.04 0.8944 |
27.18 0.8709 |
25.03 0.7420 |
|
Image |
Bridge 256×256 |
||
|
TV |
27.40 0.7876 |
25.63 0.7183 |
24.16 0.6480 |
|
M-PM |
29.74 0.8878 |
26.12 0.7753 |
24.27 0.6845 |
|
Beltrami |
30.02 0.8908 |
26.23 0.7781 |
24.23 0.6860 |
|
MQDP |
30.08 0.8982 |
26.15 0.7898 |
24.31 0.7079 |
|
Proposed Horizontal |
30.16 0.9141 |
26.31 0.8005 |
24.38 0.7126 |
|
Proposed Vertical |
30.11 0.9087 |
26.26 0.7993 |
24.42 0.7116 |
|
Proposed Combination |
30.22 0.9159 26.32 0.8028 |
24.48 0.7140 |
|
In Fig. 3, we use probe ‘synthetic’ image with the size of 20×20 pixels to compare results of the multi-quadratic procedure (MQDP) [11] and proposed iterative multiquadratic procedure method with iterative horizontal processing, iterative vertical processing, and its combination. A number of iteration steps isequal to 6.


Fig. 3. a) Image “synthetic” with the size of 20×20 pixels;
f )
b)
d)

rion is equal to 2×10 –5 and the maximum number of iterations is set to 2000.
For the M-PM method, the diffusivity parameter is 3, integration constant is set to 0.1 and the number of iterations is the direct proportionality of noise level.
For the TV method, the regularization parameteris set to 0.075, tolerance for convergence criterion is equal to 5×10–4 and the maximum number of iterations is set to 300.

a)

b)

c)
-
b) Noisy PSNR = 18.5907;
-
c) MQDP: PSNR = 29.70, SSIM = 0.9784; d)Iterative horizontal: PSNR = 30.93, SSIM = 0.9862; e) Iterative vertical: PSNR = 31.51, SSIM = 0.9873; f ) Combination: PSNR = 32.94, SSIM = 0.9906

d)

e)
Fig. 4. Original images: a) House, b) Lake, c) Parrot, d) Hill, e) F16, f) Bridge

f)
For illustrations, we use the gray level images House, Lake, Parrot, Hill, F16, Bridge. The original images are presented in Figure 4.
Figure 5 and 6 show comparative result images of proposed and other methods for edge-preserving image denoising: Nonlinear Total Variation (TV) [4], Beltrami [19], Modified Perona–Malik (MP-M) [7], Multi quadratic dynamic programming (MQDP) [11].
For Beltrami method, the aspect ratio is set to 1, balancing parameter between fidelity and regularity is the inverse proportionality of noisy level, gradient descent parameter is set to 0.2, tolerance for convergence crite-
For MQDP method, we use edge functions (2) with fixed smoothing parameters values L = 3, λ = 0.2, d = 0.5 Δ 2 .
The PSNR and SSIM results for various methods are shown to demonstrate the comparison of their performances.
Conclusion
In this paper, we have tried to discuss promising edge-preserving image denoising methods on the basis of different principles of tree-like representation of an image lattice, and MQDP. A new MQDP version based on the tree-decomposition of the image pixel grid searches for the local minimum for the initial criterion (1), instead of the global minimum of its approximations.
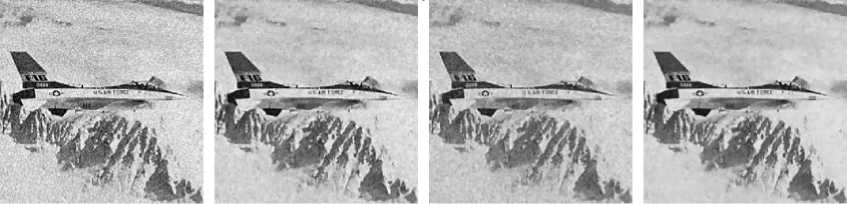
a) Noisy; PSNR= 22.21 b) TV c) M-PM d) Beltrami

e) MQDP f) Horizontal g) Vertical h) Combination
Fig. 5. Results for image “F16” (256×256): Image denoising results of the compared methods

a) Noisy: PSNR = 19.20

b) TV

c) M-PM

d) Beltrami

e) MQDP

f) Horizontal

g) Vertical

h) Combinations
Fig. 6. Results for image “Parrot” (128×128): Image denoising results of the compared methods
The experimental results show that the proposed dynamic programming procedure allows improving the quality of results of multi quadratic dynamic programming. Numerical results show that our proposed algorithms are efficient and allow to obtain result compared or even superior the existed methods.
References Tree-serial parametric dynamic programming with flexible prior model for image denoising
- Wang, Z. Modern image quality assessment. Synthesis lectures on image, video, and multimedia processing/Z. Wang, A.C. Bovik. -Morgan & Claypool Publishers, 2006. -156 p. -ISBN: 978-1-59829-022-6.
- Chambolle, A. Total variation in imaging/A. Chambolle, V. Caselles, M. Novaga. -In: Handbook of mathematical methods in imaging/ed. by O. Scherzer. -New York: Springer Science+Business Media LLC, 2011. -P. 1016-1057. - DOI: 10.1007/978-0-387-92920-0_23
- Chaudhury, K. Fast O(1) bilateral filtering using trigonometric range kernels/K. Chaudhury, D. Sage, M. Unser//IEEE Transactions on Image Processing. -2011. -Vol. 20, Issue 12. -P. 3376-3382. - DOI: 10.1109/TIP.2011.2159234
- Rudin, L.I. Nonlinear total variation based noise removal algorithms/L.I. Rudin, S. Osher, E. Fatemi//Physica D: Nonlinear Phenomena. -1992. -Vol. 60, Issues 1-4. -P. 259-268. - DOI: 10.1016/0167-2789(92)90242-F
- Wang, Y. MTV: modified total variation model for image noise removal/Y. Wang, W. Chen, S. Zhou, T. Yu, Y. Zhang//Electronics Letters. -2011. -Vol. 47, Issue 10. -P. 592-594. - DOI: 10.1049/el.2010.3505
- You, Y.-L. Fourth order partial differential equations for noise removal/Y.-L. You, M. Kaveh//IEEE Transactions on Image Processing. -2000. -Vol. 9, Issue 10. -P. 1723-1730. - DOI: 10.1109/83.869184
- Wang, Y.Q. Image denoising using modified Perona-Malik model based on directional Laplacian/Y.Q. Wang, J.C. Guo, W.F. Chen, W. Zhang//Signal Processing. -2013. -Vol. 93, Issue 9. -P. 2548-2558. - DOI: 10.1016/j.sigpro.2013.02.020
- Hammersley, J.M. Markov random fields on finite graphs and lattices/J.M. Hammersley, P.E. Clifford. -Berkeley preprint; 1971.
- Besag, J.E. Spatial interaction and the statistical analysis of lattice systems/J.E. Besag//Journal of the Royal Statistical Society, Series B. -1974. -Vol. 36, Issue 2. -P. 192-236.
- Nikolova, M. Fast nonconvex nonsmooth minimization methods for image restoration and reconstruction/M. Nikolova, K. Michael, C.-P. Tam//IEEE Transactions on Image Processing. -2010. -Vol. 19, Issue 12. -P. 3073-3088. - DOI: 10.1109/TIP.2010.2052275
- Pham, C.T. Parametric procedures for image denoising with flexible prior model/C.T. Pham, A. V.Kopylov//Proceedings of the Seventh Symposium on Information and Communication Technology (SoICT '16). -2016. -P. 294-301. - DOI: 10.1145/3011077.3011099
- Mottl, V.V. Optimization techniques on pixel neighborhood graphs for image processing/V.V. Mottl. -In: Graph-based representations in pattern recognition/ed. by J.-M. Jolion, W.G. Kropatsch. -Vienna: Springer-Verlag; 1998: 135-145 DOI: 10.1007/978-3-7091-6487-7_14
- Pham, C.T. Image processing procedures based on multi-quadratic dynamic programming/C.T. Pham//Informatica. -2017. -Vol. 41, Issue 2. -P. 255-256.
- Pham, C.T. Multi-quadratic dynamic programming procedure of edge-preserving denoising for medical images/C.T. Pham, A.V. Kopylov//ISPRS -International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. -2015. -Vol. XL-5/W6. -P. 101-106. - DOI: 10.5194/isprsarchives-XL-5-W6-101-2015
- Bertelè, U. On non-serial dynamic programming/UBertelè, F. Brioschi//Journal of Combinatorial Theory, Series A. -1973. -Vol. 14, Issue 2. -P. 137-148. - DOI: 10.1016/0097-3165(73)90016-2
- Mottl, V. Elastic transformation of the image pixel grid for similarity based face identification/V. Mottl, A.V. Kopylov, A. Kostin, A. Yermakov, J. Kittler//Proceedings of 16th International Conference on Pattern Recognition. -2002. -Vol. 3. -P. 549-552. - DOI: 10.1109/ICPR.2002.1047998
- Dvoenko, S.D. Clustering sets based on distances and proximities between its elements /S.D. Dvoenko//Sibirskii Zhurnal Industrial'noi Matematiki. -2009. -Vol. 12, Issue 1. -P. 61-73.
- Pham, C.T. Edge-preserving denoising based on dynamic programming on the full set of adjacency graphs/C.T. Pham, A.V. Kopylov, S.D. Dvoenko//ISPRS -International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. -2017. -Vol. XLII-2/W4. -P. 55-60. -DOI: 10.5194/isprs-archives-XLII-2-W4-55-2017.
- Zosso, D. A primal-dual projected gradient algorithm for efficient Beltrami regularization/D. Zosso, A. Bustin. -Technical report UCLA CAM Report 14-52 2014.
- Kopylov, A.V. Parametric dynamic programming procedures for edge preserving in signal and image smoothing/A.V. Kopylov//Pattern Recognition and Image Analysis. -2005. -Vol. 15, Issue 1. -P. 227-230.
- Kopylov, A. Tree-serial dynamic programming for image processing/A. Kopylov//Proceedings of 19th International Conference on Pattern Recognition. -2008. -P. 1-4. - DOI: 10.1109/ICPR.2008.4761407
- Kopylov, A. A signal processing algorithm based on parametric dynamic programming/A. Kopylov, O. Krasotkina, A. Pryimak, V. Mottl. -In: Image and Signal Processing/ed. by A. Elmoataz, O. Lezoray, F. Nouboud, D. Mammass, J. Meunier. -Berlin, Heidelberg: Springer, 2010. -P. 280-286. - DOI: 10.1007/978-3-642-13681-8_33
- Kalman, R.E. New results in linear filtering and prediction theory/R.E. Kalman, R.S. Bucy//Journal of Basic Engineering. -1961. -Vol. 83, Issue 1. -P. 95-108. - DOI: 10.1115/1.3658902
- Kopylov, A.V. Rowwise aggregation of variables in the dynamic programming algorithm for image processing/A.V. Kopylov//Pattern Recognition and Image Analysis. -2008. -Vol. 18, Issue 2. -P. 309-313. - DOI: 10.1134/S105466180802017X
- Dvoenko, S.D. Recognition of dependent objects based on acyclic Markov models/S.D. Dvoenko//Pattern Recognition and Image Analysis. -2012. -Vol. 22, Issue 1. -P. 28-38. - DOI: 10.1134/S1054661812010130
