Two-Dimensional Parameters Estimation

Author: Shiv Gehlot, Harish Parthasarathy, Ravendra Singh
Journal: International Journal of Image, Graphics and Signal Processing(IJIGSP) @ijigsp
Article in issue: 9 vol.8, 2016.
Free access
A parametric approach algorithm based on maximum likelihood estimation (MLE) method is proposed which can be exploited for high-resolution parameter estimation in the domain of signal processing applications. The array signal model turns out to be a superposition of two-dimensional sinusoids with the first component of each frequency doublet corresponding to the direction of the target and second component to the velocity. Numerical simulations are presented to illustrate the validity of the proposed algorithm and its various aspects. Also, the presented algorithm is compared with a subspace based technique, multiple signal classification (MUSIC) to highlight the key differences in performance under different circumstances. It is observed that the developed algorithm has satisfactory performance and is able to determine the direction of arrival (DOA) as well as the velocity of multiple moving targets and at the same time it performs better than MUSIC under correlated noise.
Direction of arrival, high resolution, two-dimensional, velocity estimation
Short address: https://sciup.org/15014009
IDR: 15014009
Text of the scientific article Two-Dimensional Parameters Estimation
Published Online September 2016 in MECS
The applications of high-resolution parameters estimation span a wide domain ranging from detection to surveillance. The two methods used to accomplish this are spectral based approach and parametric approach [1]. Speaking in the context of MUSIC, it is a high-resolution subspace based technique falling under the category of spectral based approach which utilizes covariance matrix to estimate the parameters of interest. MUSIC [2], [3] has a very high resolution and it assumes noise to be uncorrelated which leads to the diagonal correlation matrix. As a major drawback [4] MUSIC cannot be termed as a general approach as it requires advance information about the number of elements.
Estimation of Signal Parameter via Rotational Invariance Matrix (ESPRIT) [5] is also based on subspace-based approach and is a key contributor to the estimation theory. ESPRIT again is a high-resolution parameter estimation technique and has the additional advantage of lesser computational complexity. Its assumptions include sources to be centered at the same particular frequency and doublets of arrays that are not displaced rotationally [6], [7].
Parametric approach methods include Least Square Estimation (LSE) and Maximum Likelihood Estimation (MLE) [8], [9]. The maximum-likelihood method unlike least square method which models the estimation problem as a deterministic procedure demands probabilistic interpretation of all the interferences rather than the information of the parameters. Also, MLE output the parameter that is most likely responsible for producing data while LSE shortlists the parameter that seems to be the closest interpretation of the received data.
But, MLE estimates differ from LSE estimates when received data is not normally distributed and uncorrelated and different results are obtained depending upon the choice of the method between the two. However, in such a scenario MLE is preferred over LSE if probability distribution function description of the data is available. Also, both MLE and LSE arrive at same estimates if the data is normally distributed with constant variance [10], [11], [12].
In this paper, a MLE based algorithm is proposed for the estimation of different parameters of moving targets using electromagnetic sensor array. MLE suffers the disadvantage of higher computational complexity because it spans the entire signal space but has the side advantage of high-resolution parameter estimation even when the received data is corrupted by correlated noise, a condition under which MUSIC fails.
The rest of the paper is organized as follows. Section II deals with the problem formulation and derivation of the data model for the proposed algorithm. In section III, the developed data model is used for parameters estimation (DOA and velocity) using MLE. Section IV covers the simulations used for the verification of the algorithm. In section V, the MUSIC is discussed briefly and simulations are carried out to analyze the performance of the MUSIC under different circumstances with a motive of comparison between MUSIC and developed algorithm. Section VI discusses the Cramer- Rao bound, its role in the classification of the different estimators and Cramer-Rao bound calculation for the present algorithm. Section VII finally concludes the observations and results of the paper.
-
II. Data Model
For the illustration of the proposed algorithm, the discussion to be considered here is focused on DOA and velocity estimation. In signal processing, for solving such a problem, the sensors array is deployed to collect the data from the radiating sources for estimating their different parameters. Few assumptions are further invoked for the analytical compliance of the problem. The radiations from the sources are assumed to be propagating in straight lines. A dispersive and isotropic transmission medium is required to validate the above assumption. Also, the radiations striking the array can be considered as plane waves if sources are within the far-field of the array. The narrowband signals ( s ( t )) are assumed to have center frequency ( to ) so that the general wave equation is given as:
E ( r , t ) = 5 ( t ) Re[e (^ - k . r ) ] (1)
where k is propagation vector and r is position vector.
¥
x ( r , t ) = y ( 9 ) 5 ( t ) Re [ e ( m " t — k ( l — 1) d cos 9 ] (2)
Also, to0 will get shifted according to Doppler’s classical shift formulae i.e. to = to (1 — v / c )
Then, the output of lth sensor after dropping the term e*™01 gets modified to:
x ( r i , t ) = y ( 9 ) 5 ( t ) e — j to vt / c
— jk ( l — 1) d cos 9
In case of L sensors ULA, having same response for all sensors i.e. y ( 9 ) = y ( 9 ), the output can be represented as a vector
x ( t ) = 5 ( t ) e — j to vt / c a ( 9 ) (4)
where, x( t) = [ x (t) x2 (t) . . xL (t)] and ag = y(9)[1 e—jkdcos9 . . e—j(L—1)kdcos9] which is also called steering vector. Consider the case of p sources each located at an angle 9 . If the medium is considered to be linear then the output of each sensor can be written as:
xL ( t ) = 5 ( t ) y ( 9 ) e —' / c e — jk ( L — 1) d cos 9 1
+ s 2 ( t ) y ( 9 ) e — ^' / c e — jk ( L — 1) d cos 9 2
+ sp ( t ) y (9, ) e — jv to ‘ / c e — jk ( L — 1) d cos 9 p
If the sensor’s response is same for every source i.e. y ( 9 ) = y( 9 ) = y(9p ) = y ( 9 ) then the above equation can be written as:
x 1 ( t )
x 2 ( t )
— jkdcos 9 e 1
— jkdcos 9
e 2
— jkdcos9p
= y ( 9 )
X
- X l ( ‘ ) -
— jk ( L — 1) cos ^
— jk ( L — 1) cos ^
— jk ( L — 1) cos9p
-
• - • « •-----------------* —► X
o d Id 3d (L-Y)d
Fig.1. Uniform linear array
If we have a uniform linear array (ULA) [13] having L sensors and separation d between them (Fig. 1), then position vector at the Vh sensor is given as r = (l — 1)da. Consider the case of a source moving with velocity v and having a component along the direction of the line joining the origin and impinging angle 9 at the Vh sensor having a constant response y (9). Then, k = cos 9a + sin 9a and output of the sensor is given as: xy s, (‘) e—jtoV1‘ / c s2 (‘) e ""'2 ‘"
sp ( t ) e
— j to Vpt / c
It can be represented as:
x ( t ) = A ( 9 ) s v ( t ) (5)
Taking sensor’s noise into consideration:
x ( t ) = A ( 9 ) s v ( t ) + n ( t ) (6)
If the sensor’s output is sampled at t = m S where m = 0,1....... k — 1 then:
x ( m S ) = A ( 6 ) sv ( m S ) + n ( m S ) (7)
From above equation the output for the lth sensor can be written as:
x, ( m S ) = ^Л ( m S ) e - j ( 1 — 1) d cos 6 .eJjOm S / c (8)
n = 1
If 8И ( m S ) = Sn , the above equation can be rewritten as:
p
X 1 = Z S n e ( 6 n ) 0 f ( V n ) + W | (9)
n = 1
here X represents the time samples of the sensor output x .
Also e6) = [ e
— jk ( 1 — 1)cos 6 ,,
]
and e - jSvn / c e -j 25vn / c f (Vn ) = e - j (k -1) Svn / c
This concept can be extended to all the sensors and the resulting output can be written as:
p
X = E sn e ( 6 n ) 0 f ( V n ) + w (10)
n = 1
here
e ( 6 n ) = [1
— jkd cos 6
e — j ( L — 1) kd cos 6 n ] T
The above equation can also be written as:
X = S[e(6) 0 f (V1) e(62) 0 f (v2) . . e(6p) 0 f (vp)] + W where
S = [ S S 2 . . S p f
We define
A ( n ) = [ e ( 6 ) 0 f ( v , ) e ( 6 2) 0 f ( v 2) . . e ( 6p ) 0 f ( vp )]
here S is p x 1 and A ( n ) is Lk x p matrix. Using above representations, the final form of the data model is:
X = A ( n ) S + W (11)
-
III. Parameter Estimation
In the data model signal waveforms are assumed to be deterministic but unknown and noise is modelled as i.i.d. spatio-temporal white Gaussian random process with constant variance i.e. 2 . As a result X is also a
Lk x 1
Gaussian random process with mean A ( n ) S and variance о 2 I . The PDF of a Gaussian random variable is given by:
p ( x ) = —--- e -( x - ^ )2/2 ° 2 (12)
V 2 по о
Here ц and о 2 represent mean and variance of the random variable. Using (12), the PDF of observation vector X is given by:
Y = ce—lix—A(n)S||2/2o2^^
where, C is a constant and does not contribute to decision making. Taking log of both sides of (13), we get
Z = — ||X — A(n)S ||2
Neglecting the term — C , we get PDF as: 2 o2
Y =|| X — A(n)S ||2
The maximum-likelihood estimation rule dictates that (15) is to be minimized with respect to n . First, to obtain maximum-likelihood (ML) estimate of S , the derivative of (15) with respect to S is set to zero. This will result in
5 ' = ( AHA ) — 1 A H X (16)
where A is a function of n . Using (15) and (16), we get
Y = || X — P ( n ) X||2 (17)
where P( n ) = A(A H A ) 1 A H . The above expression can be rewritten as:
Y=( IMI2 -IP(n)MГ ) (18)
Minimizing the above expression implies maximizing! | P ( n ) M ||2. So, the ML estimate of parameter П is given by:
П = Arg max n |P ( n ) M||2 (19)
The MLE estimate can be determined by exploiting the non-linear optimization algorithms. The basic principle behind non-linear optimization is to find the optimal parameters so that log-likelihood function is maximized [14]. This can be achieved by dividing the multi-dimensional parameter space into smaller sub-sets and applying trial and error approach such that for next iteration parameters value is modified so that it leads to better performance than that for previous parameters values.
0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
Direction in radians
Fig.2. Direction estimation of the first target at 10dB
2.5
Noise effect
Ideal
IV. Simulations

Many simulations have been conducted to explore the various aspects of above discussed algorithm. The numbers of sensors on the array were chosen to be five with uniform spacing between them. Also, the centre frequency was chosen as 100* c , where c the velocity of light. The sampling interval 5 was chosen to be equal to the wavelength ( Я ) of the signal. The spacing ( d ) between
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4
Direction in radians
sensors was chosen to be X /10 . Also, the numbers of targets were chosen to be two and it was also assumed that numbers of targets are known in advance. The noise was assumed to be additive white Gaussian noise with zero
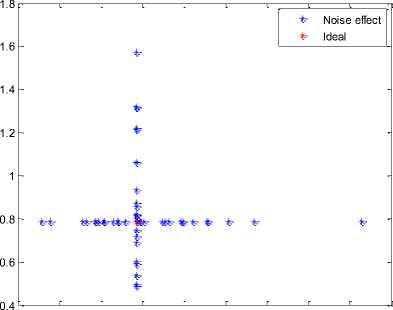
Fig.3. Direction estimation of the second target at 10dB
B. Velocity Estimations of the Targets
mean and unit variance. Also, the velocity of targets was
restricted between 1/50 to 1/10 m/sec i.e.
v =
50,10
Targets were having a velocity of 1/40 and 1/20 m/s. Other conditions were same as for direction estimation. Estimations are illustrated in Fig.4 and Fig.5.
m/sec., however, no restriction was made in the direction of targets i.e. 0 = [0, 2 n ] radians.
0.032
0.03
Noise effect Ideal
-
A. Direction Estimations of Targets
0.028
0.026
0.024
0.022
0.02
0.018
0.016
0.014
0.01
0.015 0.02 0.025 0.03 0.035
Two targets were located at π/4 and π/2 radians respectively and were of unequal power. Also, the signal to noise ratio (SNR) for each target was 10dB and 51 iterations were conducted, one for estimation under the ideal condition and other 50 for estimation when the noise was present. In each trial noise was different. Estimations are illustrated in Fig.2 and Fig.3.
Velocity in m/sec
Fig.4. Velocity estimation of the first target
E
0.08
0.07
0.06
0.05■к
0.04
0.03
0.02
0.01
*-
t
*- Noise effect t- Ideal
0.0265
0.026
0.0255 E
0.025
0.0245
*- Noise effect
*• Ideal
* *■
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
Velocity in m/sec
Fig.5. Velocity estimation of the second target
0.024t---------------Г---------------^---------------Г----------------1---------------1
0.024 0.0245 0.025 0.0255 0.026 0.0265
Velocity in m/sec
Fig.8. Velocity estimation of the first target at 20 dB
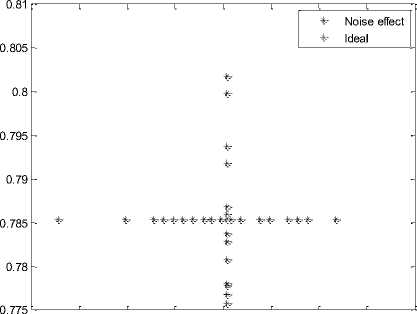
Another 51 iterations were made for these two targets with SNR of 20 dB. Results are shown in Fig.6, Fig.7, Fig.8 and Fig.9.
0.055
0.765 0.77 0.775 0.78 0.785 0.79 0.795 0.8 0.805
Direction in radians
Fig.6. Direction estimation of the first target at 20 dB
0.054
0.053
0.052
0.051
0.05
0.049 к *.
1.58
1.555
1.56
1.575
1.57
1.565
1.56
|
---------------1---------------------------- |
||
|
4=" Noise effect |
||
|
* Ideal |
||
|
*" * *" |
||
1.565
1.57
1.575
1.58
Direction in radians
1.585
Fig.7. Direction estimation of the second target at 20 dB
*• Noise effect
*- Ideal
0.048 t---------------r---------------1--------------^--------------1--------------r---------------1
0.047 0.048 0.049 0.05 0.051 0.052 0.053
Velocity in m/sec
Fig.9. Velocity estimation of the second target at 20 dB
Simulations depict the validity of the algorithm for ideal case and to a greater extent for practical scenario as well (presence of noise). Also, it can be observed that effect of noise is less prominent in case of velocity estimation as compared with the case of direction estimation. Further, the average error in estimations for different SNR is summarized in table 1.
Table 1. Average error in parameters estimation
|
SNR |
Error in direction estimation |
Error in velocity estimation |
|
10dB |
.65 |
.034 |
|
20dB |
.011 |
.033 |
C. Effect of enhanced SNR on estimation error
Fig.10 and Fig.11 depict the effect of SNR on error in estimations.
Error in direction estimation of first target
Fig.10. Effect on direction estimation
x 10-3 Error in velocity estimation
-
4.5
-
3.5
-
2.5
0.5
10 11 12 13 14 15 16 17 18 19 20
SNR
Fig.11. Effect on velocity estimation
It is observed from Fig.10 and Fig.11 that performance of the algorithm is improving drastically with improvement in SNR and theoretically at very high SNR the algorithm will achieve noise immunity.
-
V. MUSIC Estimator
For the sake of completeness and for demonstrating the pragmatic aspect of the developed algorithm, a comparison with MUSIC estimator is made in this section. MUSIC was introduced as a most effective DOA estimation technique which proceeds by decomposition of covariance matrix and forming a spectrum using steering vector. MUSIC works well for ideal case and uncorrelated noise but fails for the correlated noise.
Reconsider the data model
x ( t ) = A ( θ ) s v ( t ) + n ( t )
We define spatial-covariance matrix as:
R = E { x ( t ) x H ( t )}
R = A ( θ ) E { s v ( t ) s vH ( t )} A H + E { n ( t ) n H ( t )}
If noise is assumed to be spatio-temporal white with common variance σ 2 then
E{n(t)nH(t)}=σ2I and if P = E{s (t)s H (t)} then R will become
R = A ( θ ) PA H ( θ ) + σ 2 I
R can be factored as R = U Λ UH with
Λ = diag[λ λ . . λ ] is a diagonal matrix of eigen values λ,λ ,...λ and U is a unitary matrix having eigen vectors corresponding to eigen values λ,λ,...λ . R can also be written as
R=UsΛnUsH +UnΛnUnH(20)
with Λ = σ 2 I . In practise, an estimate of R is found as
R=1∑k x(t)xH(t)
k t = 1
Hence,
Rs =UsΛsUsH+UnΛnUnH(22)
The projector operators onto signal subspace are defined as:
Π=UsUsH=A(θ)(A(θ)HA(θ))-1A(θ)H(23)
Similarly, projection onto noise signal subspace is defined as:
Π ⊥ = UnUnH = I - A ( θ )( A ( θ ) H A ( θ )) - 1 A ( θ ) H (24)
The MUSIC spatial spectrum is then defined as:
P ( θ ) = a H ( θ ) a ( θ )
M a H ( θ ) ∏ ⊥ a ( θ )
Where, a ( θ ) is steering vector.
P ( θ ) is not a true spectrum but instead gives a peak at the point of direction of arrival (DOA).
-
A. Simulations
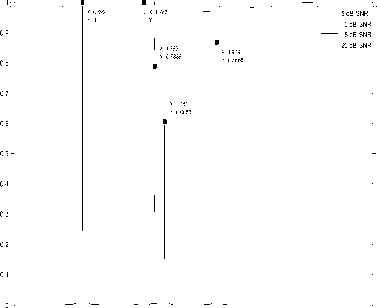
Several simulations were carried out to analyse the performance of MUSIC algorithm and to compare it with the developed algorithm for the case of (DOA) estimation. Two sources were chosen in the far field of sensors array which were located at π/3 and π/2 radians. Also, the numbers of sensors were chosen to be five. Few simulations were carried under ideal conditions (absence of noise) and then under uncorrelated noise conditions. Simulations were also carried for correlated noise with different SNR.
X: 1.047
Y: 1
1.5 2
Direction of Arrival
Fig.14. Estimation under correlated noise for different SNR
Direction of Arrival( in radians)
Fig.12. Ideal estimation
Direction of Arrival (in radians)
Fig.13. Estimation under uncorrelated noise
It can be inference from the simulations that MUSIC and proposed algorithm are contrasting for the case of correlated noise. The performance of MUSIC is compromised drastically for this case but for ideal case and uncorrelated noise MUSIC is always way ahead of the proposed algorithm considering its affordable computational complexity. Table 2 further highlights the key differences between MUSIC and proposed algorithm.
Table 2. Comparison of proposed algorithm and MUSIC
|
Parameter |
Proposed algorithm |
MUSIC |
|
Principle |
Parametric approach |
Spectral decomposition |
|
Performance under uncorrelated noise |
Good |
Good |
|
Performance under correlated noise |
Good |
Degraded |
|
Computational complexity |
High |
Less |
|
Consistency |
Yes |
Yes |
|
Effect of enhanced SNR |
Improved performance |
Improved performance |
VI. Cramer-Rao Bound Calculation
The purpose of an estimation algorithm is to map the message S to S . The adjacency of S and S can be used to specify the integrity of the receivers. For a probabilistic problem the PDF and variance are used to measure the deviation from ideal estimater. A suitable measure of the performance for an unbiased estimation [15] is Cramer-Rao bound. The Cramer-Rao bound [16] is given as:
var ( S, ( x ) | S ) >
E
d , ln p ( x | S )
d S ‘
1— A A-1
a —( a 2 L ) , а2 ( а 2 L )
and asrav asidv a
where x is the observation vector. The unbiased estimator for which Cramer-Rao bound is satisfied with equality is called efficient estimator. In this section we proceed with the Cramer-Rao bound calculation for the developed algorithm.
Again, consider the data model
X = A(n)S + W
Fisher-Information matrix [17] is given as:
a 2J ^ ) = a 2 E f - ^-L- (a ^ a ^ T
This matrix has to be written for parameter ф i.e.
We define
E ( 0 , v ) = col [ e ( 6a ) ® f ( va )], 1 < a < m (27)
Using (13), we get
- log p ( x | S ) = —- || x - ES ||— a
L = —1| x - ES ||- a a2L =|| x -ES ||-
= ( xH - S H E H )( x - ES )
= || x || 2 - 2 « ( ShEhx ) + S H E H ES = || x ||- - — « ( S я - j S i ) T E H x + .. ..( S r - j S I ) T ( E H E )( S r + j S I )
where we have assumed S = S^ + j S; .
Now, we calculate the following derivatives:
6>2 L ) t d— ( a2 L )
-----= —E E =-----=- a s „a S T a S, a S T
RR II
8 ( a L T ) = j ( E h E - ( E h E ) t ) = - — 3 ( E h E ) a S„ a S T
RI
8 ( a L ) = - — 3 ( E h E ) t = — 3 ( E h E ) a S, a S T
IR
d^ l = - — « ( s h ^- EL x ) + s h ^E H E s a e „ aep v aeaaep 2 aeaaep
d -^ = - — « ( s h E- !! x ) + s h EE H E s a v a a v p s v a a v p a v „ s v p
a —( q 2 L ) dea 9 v в
= - — « ( S h
8 E x) + SH dE E SH dea d vp dea d vp
J ee , J e v , J e s„ , J e s, , J v e , J v e , J vs „, J vs, , J s„ e , J s„v , R I R IR R
J s„s„ , J s„s, , J s,e , J s,v , J s,s„ , J s,s, RR RI I I IR II
а —( ст2 L ) a s r ae a
=- — « ( d - E H x ) + — «d ( E H E ) Sr s e a s e a R
23 8 (eH E )
s e a
S I
d 2( a2 L ) s s i se a
- 2 3 (-
d 2 e h
s e a
x ) + — «
d ( E H E ) s e a
Sr + 2 3 R
d ( e H E ) s e a
S R
and similarly, we can calculate
After calculating all these terms, the results are substituted in (26) which will provide the Cramer-Rao bound of the developed algorithm.
-
VII. Conclusion
We proposed and investigated an algorithm based on MLE and also contrasted it with MUSIC algorithm. During simulations, it was found that for the case of uncorrelated noise both the algorithms had the same performance, MUSIC, in addition, had the advantage of low computational complexity but for the case of correlated noise MUSIC algorithm had a degraded performance while ML based algorithm continued to work satisfactorily. However, the price paid for this advantage was increased computational complexity as ML uses multidimensional search to find the estimates. For the case of correlated noise, even at high SNR, the performance of MUSIC estimator was not satisfactory while ML based algorithm was showing a significant performance improvement with SNR. Also, the improvement for velocity estimation was more pronounced than for DOA estimation.
References Two-Dimensional Parameters Estimation
- Dong P. "Robust Digital Image Watermarking". PhD thesis, Electrical Engineering in the Graduate College of the Illinois Institute of Technology, Chicago, USA, 2004.
- Terzija N. "Robust Digital Image Watermarking Algorithms for Copyright Protection". PhD thesis, Faculty of Engineering, Duisburg Essen University, Duisburg, Germany, 2006.
- Kazan S. "Digital Image Watermarking Methods Using Moment Based Normalization". PhD thesis, Faculty of Engineering, Sakarya University, Sakarya, Turkey, 2009.
- Potdar VM., Han S. Cahng E. "A survey of digital image watermarking techniques", IEEE International Conference on Industrial Informatics, Perth, Australia,10-12 August, 2005, pp. 709-716.
- Shing P., Chadha R. "A survey of digital image watermarking techniques application and attacks", International Journal of Engineering and Innovative Technology (IJEIT), 2013, vol. 2 19, pp.70-73.
- Haykin S. Adaptive Filter Theory. 4.th ed. New Jersey, Prentice Hall, 2002.
- Bao P., Ma X. "Image adaptive watermarking using wavelet domain singular value decomposition", IEEE Trans. on Circuits and Systems for Video Tech., 2005,vol.15 1, pp.96-102.
- Lai CC., Tsai CC. "Digital Image watermarking using discrete wavelet transform and singular value decomposition", IEEE Trans. on Instrumentation and Measurement, 2011, vol.59 11, pp. 3060-3063.
- Kekre HB., Sarade T., Natu S." Performance Comparison of Watermarking Using SVD with Orthogonal Transforms and Their Wavelet Transforms", I. J. Image, Graphics and Signal Processing, 2015, vol.4, pp. 1-18.
- Giri KJ., Peer MA., Nagabhushan P."A Robust Color Image Watermarking Scheme Using Discrete Wavelet Transformation", I. J. Image, Graphics and Signal Processing, 2015, vol.1, pp. 47-52
- Mohananthini N., Yamuna G." A Robust Image Watermarking Scheme Based Multiresolution Analysis", I. J. Image, Graphics and Signal Processing, 2012, vol.11, pp. 9-15.
- Aslantas V., Dogan LA., Ozturk S. "DWT-SVD based image watermarking using particle swarm optimizer", Proc. IEEE Int. Conf. Multimedia Expo, 2008, Hannover, Germany, pp.241–244.
- Bhatnagar G., Raman B. "A new robust reference watermarking scheme based on DWT-SVD", Comput. Standards Interfaces, 2009, vol. 31 5, pp.1002–1013.
- Ganic E., Eskicioglu AM. "Robust DWT-SVD domain image watermarking: Embedding data in all frequencies", Proc. Workshop Multimedia Security, Magdeburg, Germany, 2004, pp.166–174.
- Li Q., Yuan C., Zhong, Y. Z. "Adaptive DWT-SVD domain image watermarking using human visual model." Proc. 9thInt. Conf. Adv. Commun. Technol., Gangwon-Do, South Korea, 2007, pp. 1947–1951.
- Ganic E., Eskicioglu AM. "Robust embedding of visual watermarks using discrete wavelet transform and singular value decomposition", Journal on Electron. Imaging, 2005, vol.14 4, pp.043004-9.
- Nyguyan T H. et al. "Robust and high capacity watermarking for image based on DWT-SVD", The 2015 IEEE RIVF Int. Conf. on Computing & Communication Tech., 2005, pp.83-88.
- Makbol NM., Khoo BE. "Robust blind image watermarking scheme based on redundant wavelet transform and singular value decomposition",Int. J. Electron. Commun.(AEÜ), 2013, vol.67, pp.102-112.
- Lagzian S., Soryani M., "Fathy M. A new robust watermarking scheme based on RDWT-SVD", International Journal of Intelligent Information Processing, 2011, vol. 2(1), pp.1-8.
- Lagzian S., Soryani M., Fathy M. "Robust watermarking scheme based on RDWT-SVD: embedding data in all sub-bands", International Symp. on Artificial Intelligence and Signal Processing (AISP), Tehran,15-16 June, 2011, pp. 48-52.
- Khare P., Verma AK., Srivasta VK. "Digital image watermarking scheme in wavelet domain using chaotic encryption", Students Conference on Engineering and Systems (SCES), Allahabad, 28-30 May, 2014, pp.1-4.
- Liu NS., Guo DH. "Robust digital watermarking based on chaotic maps", Int. Conf. on Anti-Counterfeiting, Security and Identification (ASID), 2012, pp.1-5.
- Yi Z. "Design of watermarking algorithm based on chaos and discrete transform", Fifth International Conf. on Intelligent Systems Design and Engineering App., Hunan,15-16 June, 2014, pp. 404-407.
- Tiwari A., Gupta KK. "An effective approach of digital image watermarking for copyright protection", International Journal of Big Data Security Intelligence, 2015, vol.2 1, pp.7-18.
- Ma N., Zhang Q., Li Y. "Digital image watermarking robust to geometric attacks based on wavelet domain", IEEE Fifth International Conference on Bio-Inspired Computing: Theories and Applications (BIC-TA), 2010, pp. 787-792.
- Liu F., Wu C-K. "Robust visual cryptography-based watermarking scheme for multiple cover images and multiple owners", IET Information Security, 2011, vol. 5 2, pp. 121-128.
- Prodhan C., Saxena V., Bisoi A K. "Non-blind digital watermarking technique using DCT and cross chaos map", International Conference on Communications, Devices and Intelligent Systems (CODIS), Kolkata, 28-29 December, 2012, pp. 274-277
- Anees A., Siddgui AM. "A technique for digital watermarking in combined spatial and transform domains using chaotic maps", 2nd. National Conference on Information Assurance (NCIA), 11-12 December, 2013, Rawalpindi, pp. 119-124.
- Zhou S., Wang B., Zhang X., Zhou C. "Digital watermarking based on chaos game representation and discrete cosine transform", 7th. International Congress on Image and Signal Processing, 14-16 October, 2014, Dalian, pp.335-339.
- Singh S., Bansel S., Singh S. "Robust and secure image watermarking using DWT-SVD and chaotic map", International Journal of Advanced Research in Computer and Communication Engineering, 2015, vol. 4 9:, pp.111-116.
- Cui S., Wang Y. "Redundant wavelet transform in video signal processing", Int. Conf. on Image Processing, Computer Vision, Matrix Recognition, Las Vegas, 2006, pp. 191-196.
- Haque SR. "Singular Value Decomposition and Discrete Cosine Transform Based Image Watermarking", Department of Interaction and System Design School of Engineering Blekinge Institute of Technology, MSc., Blekinge, Sweden, 2008.
- Stavroulakis P. Chaos Applications in Telecommunications,1st ed., Boca Raton, FL, USA, Taylor &Francis, CRC Press,2006.
- Al-Haj A..Combined "DWT-DCT Digital Image Watermarking", Journal of Computer Science, 2007, vol. 3 9, pp.740-746.
- Rawat S., Raman B. "A publicly verifiable lossless watermarking scheme for copyright protection and ownership assertion", Int. J. Electron Commun. (AEÜ), 2012, vol.66, pp.955-962.
- Rastegar S., Namazi F. "A hybrid watermarking algorithm based on singular values decomposition and radon transform", Int. J. on Electron. Commun. (AEÜ), 2012; vol.66 4, pp.275-28.Hamid Karim and Mats Viberg, "Two Decade of Array Signal Processing,"IEEE Signal Processing Magazine, July 1996.
- Schmidt, R.O, "Multiple Emitter Location and Signal Parameter Estimation," IEEE Trans. Antennas Propagation, Vol. AP-34 (March 1986), pp.276-280.
- Belouchrani, A.; Amin, M.G., "Time-frequency MUSIC," Signal Processing Letters, IEEE , vol.6, no.5, pp.109,110, May 1999.
- Paulraj, A.; Roy, R.; Kailath, T., "A subspace rotation approach to signal parameter estimation," Proceedings of the IEEE , vol.74, no.7, pp.1044,1046, July 1986.
- Roy, R.; Kailath, T., "ESPRIT-estimation of signal parameters via rotational invariance techniques," Acoustics, Speech and Signal Processing, IEEE Transactions on , vol.37, no.7, pp.984,995, Jul 1989.
- GIRD Systems, Inc. 310 Terrace Ave. Cincinnati, Ohio 45220, "An Introduction to MUSIC and ESPRIT".
- Lavate, T.B.; Kokate, V.K.; Sapkal, A.M., "Performance Analysis of MUSIC and ESPRIT DOA Estimation Algorithms for Adaptive Array Smart Antenna in Mobile Communication," Computer and Network Technology (ICCNT), 2010 Second International Conference on , vol., no., pp.308,311, 23-25 April 2010.
- H.L. Van Trees, Detection, Estimation, and Modulation Theory, New York, Wiley 1971.
- Myung, In Jae. "Tutorial on maximum likelihood estimation," Journal of mathematical Psychology 47.1 (2003): 90-100.
- S.K. Gehlot, Ravendra Singh, "Trajectory Estimation of a moving charged particle: An application of least square estimation (LSE) approach", IEEE, Medcom 2014, pp 262-265, Nov 2014.
- Saea A. Van De Geer, Least Squares Estimation, Encyclopaedia of Statistics in Behavioral Science, Volume 2, pp. 10411045.
- C. Radhakrishnan Rao. Linear Statistical Inference and Its Applications,John Wiley Sons 1965.
- H. L. Van Trees, "Optimum array processing – Part IV of detection, estimation, and modulation theory", John Wiley, 2002
- Gholami, M.R.; Gezici, S.; Strom, E.G.; Rydstrom, M., "Positioning algorithms for cooperative networks in the presence of an unknown turn-around time," Signal Processing Advances in Wireless Communications (SPAWC), 2011 IEEE 12th International Workshop on , vol., no., pp.166,170, 26-29 June 2011.
- Voinov, Vassily ; Nikulin, Mikhail (1993). Unbiased estimators and their applications. 1: Univariate case. Dordrect: Kluwer Academic Publishers. ISBN 0-7923-2382-3.
- Zachariah, D.; Stoica, P., "Cramer-Rao Bound Analog of Bayes' Rule [Lecture Notes]," Signal Processing Magazine, IEEE , vol.32, no.2, pp.164,168, March 2015.
- Frieden, B. Roy. Science from Fisher information: a unification. Cambridge University Press, 2004.
