Учёт мультиколлинеарных атрибутов пространственно-распределённых данных, полученных с помощью беспилотных летательных аппаратов

Автор: Михеев Сергей Владиславович, Федосеев Александр Андреевич, Головнин Олег Константинович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Перспективные информационные технологии
Статья в выпуске: 2-5 т.17, 2015 года.
Бесплатный доступ
Рассматриваются вопросы получения данных об объектах и состоянии транспортной инфраструктуры с использованием беспилотных летательных аппаратов. Рассматриваются вопросы обработки получаемых пространственно-распределённых данных, включая комплексирование и интеллектуальный анализ.
Беспилотный летательный аппарат, транспортная инфраструктура, транспортный поток, технические средства организации дорожного движения
Короткий адрес: https://sciup.org/148203702
IDR: 148203702 | УДК: 004.9
Taking into account of multicollinearity attributes of unmanned aerial vehicles spatial distributed data
Problems of objects and transport infrastructure data acquisition via unmanned aerial vehicles are discussed. Problems of spatial-distributed data interpretation (fusion, intelligent analysis) are also described.
Текст научной статьи Учёт мультиколлинеарных атрибутов пространственно-распределённых данных, полученных с помощью беспилотных летательных аппаратов
Процесс поддержки принятия решений при управлении современной транспортной инфраструктурой (ТрИ) требует наличия оперативных, достоверных и детализированных данных о её параметрах. Для получения оперативной информации, наряду с классическими методами средствами и инструментами [3, 6, 7, 9], сегодня используются беспилотные летательные аппараты (БПЛА). Метод исследования (обследования) ТрИ с помощью БПЛА значительно расширяет возможности передвижных мобильных лабораторий, а также увеличивает охват возможной зоны анализа ТрИ.
Модель предметной области «Транспортная инфраструктура» (рисунок 1) включает в себя задачи управления ТрИ, а также модели улично-дорожной сети (УДС), транспортного потока (ТрП), технических средств организации дорожного движения (ТСОДД).
В зависимости от типа БПЛА основными областями их применения являются:
-
- мониторинг, оценка и диагностика состояния статических объектов ТрИ;
-
- проектирование УДС и объектов ТрИ;
-
- мониторинг, оценка и анализ характеристик ТрП;
-
- информационная поддержка дислокации ТСОДД и других объектов ТрИ;
-
- оценка очагов аварийности.
на рабочей высоте полёта до 3 км в зависимости требований к уровню детальности целевой информации, а также ширине кадров. Помимо стандартного навигационного бортового оборудования и автопилота, включающего в себя датчик измерения углового положения, БПЛА опционально оснащается одно- или двухчастотным геодезическим навигационным приёмником GPS/Глонасс (в комплекте с базовой станцией) для получения точных географических координат центров фотографирования. Технология получения данных о ТрИ с применением БПЛА самолётного типа включает в себя несколько основных этапов:
-
- предполётная подготовка беспилотного комплекса;
-
- подготовка полётного задания;
-
- выполнение полёта;
-
- послеполётная подготовка беспилотного комплекса;
-
- предварительная обработка полученных данных;
-
- обработка данных в соответствии с конкретной тематической задачей.
На этапе предполётной подготовки беспилотного комплекса производится сборка и монтаж оборудования в полевых условиях на месте старта. Выполняется настройка и проверка систем БПЛА, устанавливается базовая навигационная станция GPS/Глонасс. При подготовке полётного задания учитываются текущие и прогнозируемые погодные условия, особенности рельефа и типа местности, на которой выполняются съёмочные работы. Устанавливаются режимы работы БПЛА и целевой аппаратуры. Несмотря на оснащение БПЛА автопилотом в задачи оператора входит контроль выполнения полётного задания и при необходимости его корректировка, а также принятие оперативных решений, особенно на этапе посадки. Послеполётная подготовка беспилотно-

Рис. 1. Декомпозиция предметной области на классы объектов
го комплекса предполагает укладку парашюта, передачу в блок наземной станции управления целевой и навигационной информации, а также демонтаж оборудования. Предварительная обработка полученных данных является этапом подготовки полученных снимков к дальнейшей обработке и как правило включает в себя сортировку данных, проверку их комплектности и конвертацию в требуемые форматы.
Целью последнего этапа является создание продукта, используемого для решения конкретной тематической задачи. На данном этапе производится обработка навигационной информации, привязка снимков к центрам фотографирования и их выравнивание на основе навигационной, а также информации об угловом положении БПЛА в момент съёмки. Строится разреженное облако точек. При необходимости повышение точности координатной привязки снимков достигается использованием опорных точек на УДС, точные координаты которых измеряются навигационным приёмником, как правило, в дифференци- составе беспилотного комплекса точная координатная привязка может также осуществляться на основе опорной сети дорог, создаваемой с использованием нескольких приёмников также в дифференциальном режиме. При этом, один из приёмников устанавливается на мобильную дорожную лабораторию, а один или два базовых приёмника стационарно устанавливаются на смежные станции дорожной геодезической сети (СДГС) с шагом не более 30 км (рис. 2, 3). Дорожная лаборатория должна перемещаться таким образом, чтобы расстояние от подвижного приёмника до любого из базовых приёмников не превышало 30 км. Для участков протяжённостью более 30 км всю дорогу предварительно разбивают на фрагменты, назначая их границы в зоне СДГС (рис. 3). В результате выполнения полевых измерений и пост-обработки имеется массив координат, полученных в результате прямого и обратного проездов. Итоговый файл содержит координаты требуемых объектов [5].
альном режиме. При отсутствии геодезического навигационного комплекта оборудования в

Рис. 2. Пример построения опорной сети
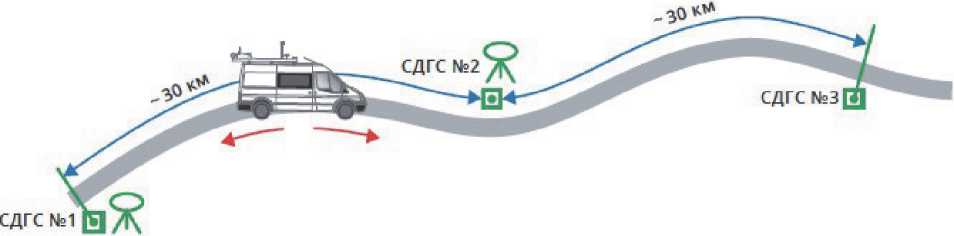
Рис. 3. Пример записи пространственной модели оси дороги
Далее на этапе создания продукта для решения тематической задачи производится построение плотного облака точек. Затем строится модель заданного участка, а также ортофотоплан района интереса. При необходимости возможно создание цифровой модели местности.
Для анализа площадных участков ТрИ и УДС, а также для исследования характеристик ТрП целесообразно использовать БПЛА коптерного типа, позволяющего получать большие серии разноракурсных перекрывающихся снимков, обеспечивающих построение высокодетальных моделей объектов интереса. Результаты высотных съёмок используются для оценки характеристик ТрП. Получение данных о дислокации ТСОДД и мониторинга их состояния требует проведения горизонтальной маловысотной аэрофотосъемки.
Помимо данных с БПЛА, для исследования ТрИ используются также разнородные и разновременные данные дистанционного зондирования Земли (ДЗЗ), получаемые мульти-, гиперспектральными, радиолокационными системами ДЗЗ. Комплексирование разнородных и разновременных данных ДЗЗ позволяет улучшить процесс обнаружения и классификации объектов транспортной инфраструктуры, а также выявления различных изменений [8]. В связи с этим имеется актуальная потребность в создании специальных систем, позволяющих:
-
- комплексировать спектрозональные изображения с пространственными особенностями (например, контуры границ, текстура и трёхмерные особенности) с учётом пространственноспектральных паттернов объектов транспортной инфраструктуры;
-
- проводить интеллектуальный анализ изображений для выявления скрытых закономерностей, присущих отдельным объектам интереса;
-
- осуществлять формирование базы данных спектральных сигнатур объектов интереса для автоматизации поиска их в больших наборах данных;
-
- использовать обученные «поисковые агенты» для доступа к комплексированным изображениям и оценки изменений в объектах транспортной инфраструктуры.
Принцип комплексирования основан на концепции послойного формирования данных, когда слои включают в себя мультиспектральные и мультивременные изображения, а также трёхмерные модели рельефа. Цифровые модели рельефа используются не только для ортокоррекции изображения, но и для подробных расчётов, когда учитываются крыши домов и стены зданий. Трёхмерная модель рельефа (местности) может быть построена непосредственно на основе снимков, получаемых различными способами (оптикоэлектронная съёмка, радарная съёмка, лидарная съёмка и т.д.).
На рис. 5 представлена концепция комплекси-рования информации от разных датчиков, включая интеллектуальный анализ. Многоаспектные формы изображений формируются с использованием 3D-модели и образуют многослойные данные. Изображения затем размещаются в среде для интерактивной 3D-визуализации и интеллектуального анализа.
Прототип системы, которая включает в себя каждый из этапов мультисенсорного комплекси-рования, приведен на рис. 6.
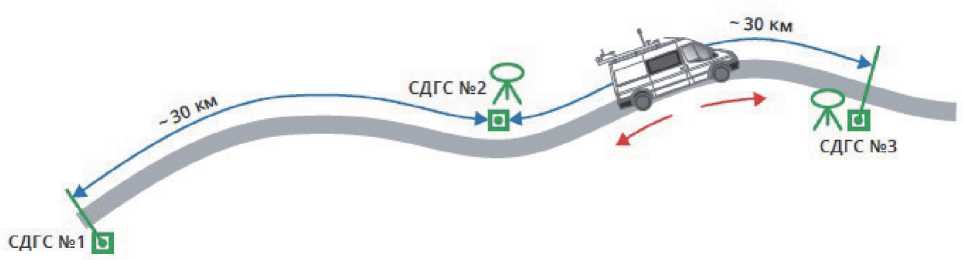
Рис. 4. Пример записи пространственной модели оси дороги по участкам
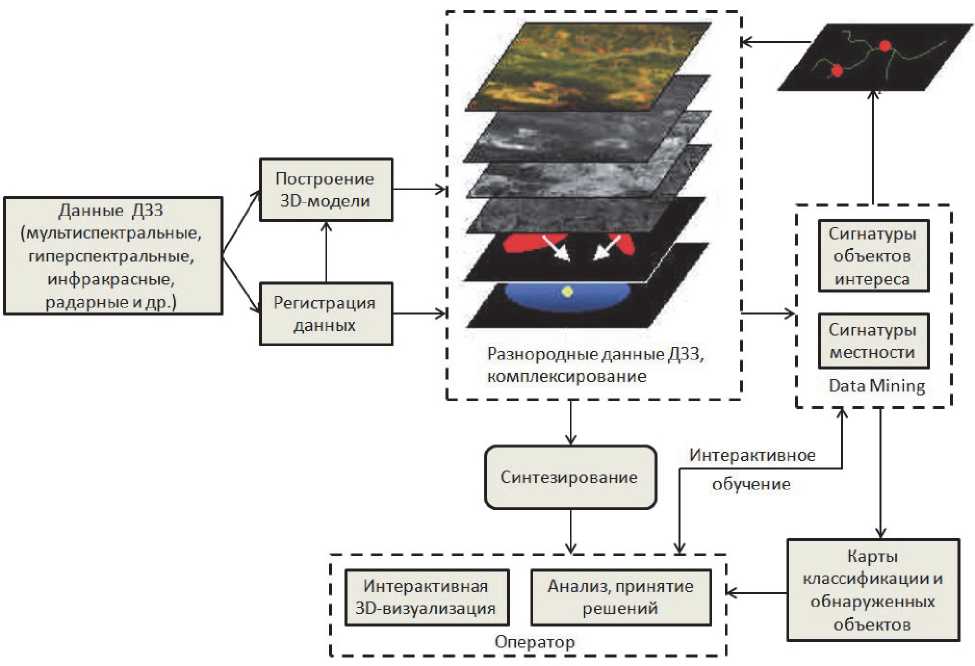
Рис. 5. Концепция комплексирования данных
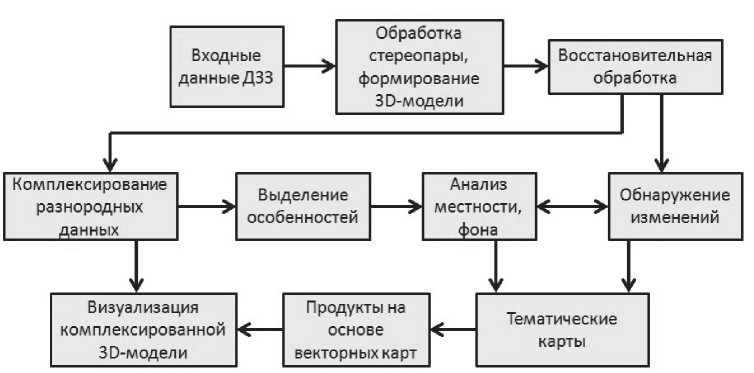
Рис. 6. Последовательность обработки, направленной на комплексирование и интеллектуальный анализ данных
Цепь обработки включает в себя набор модулей, некоторые из которых включают в себя коммерческие инструменты (для получения, ортотрансформирования, векторизации изображений и т.д.), а также специальные инструменты для улучшения, извлечения пространственноспектральных характеристик, интеллектуального анализа данных и т.д. Данный подход может совершенствоваться, так как новые системы ДЗЗ могут обеспечить исходные данные для комплек-сирования, синтеза и анализа, а также могут быть добавлены специальные функции для «добычи» новых данных. Могут быть также использованы различные методы обнаружения изменений.
На сегодняшний день обработка данных ДЗЗ, полученных с БПЛА, осуществляется разработанным подключаемым модулем для системы учета геометрических параметров ТрИ WayMark [6]. При проведении мероприятий по управлению ТрИ, особую роль отводят необходимой и достаточной дислокации управляющих объектов ТрИ – ТСОДД. Реализована система поддержки принятия решений по дислокации ТСОДД в среде ИТС. Эффективная работа системы потребовала выделения отдельных функций по получению из различных источников данных, в том числе, слабоструктурированных и неструктурированных [1]. Анализ данных и неявных зависимостей между ними реализуется с помощью методов интеллектуального анализа данных Data Mining [4, 7]. Визуализация данных о ТрИ и маршрутов 5. движения БПЛА во время обследования осуществляется в среде транспортной географической 6 информационной системы ITSGIS, которая вы- .
ступает единым информационным пространством для реализации и идентификации модели ТрИ.
Список литературы Учёт мультиколлинеарных атрибутов пространственно-распределённых данных, полученных с помощью беспилотных летательных аппаратов
- Автоматизированная система интеллектуальной поддержки принятия решений в распределенных средах/О.К. Головнин, Т.И. Михеева, А.В. Сидоров//Вестник УГАТУ. 2014. Т. 18, № 5 (66). С. 131-138.
- Котов А.А., Поспелов П.И. Мобильный видеомониторинг транспортных потоков для автоматизированного учета интенсивности дорожного движения в районах малой инфраструктурной доступности//Вестник МАДИ. 2013. № 4. С. 65-71.
- Разработка проектов организации дорожного движения: настоящее и будущее/А.Д. Кривопалов, Д.А. Петренко, А.В. Скворцов//САПР и ГИС автомобильных дорог. 2014. № 2 (3). С. 86-92.
- Михеева Т.И. Data Mining в геоинформационных технологиях//Вестник Самарского гос. техн. ун-та. 2006. №41. С. 96-99.
- Петров А.В. Инвентаризация, паспортизация и диагностика автомобильных дорог//Дорожная техника. 2008. №8. С. 38-42.
- Сидоров А.В. Головнин О.К. Программно-аппаратный комплекс учета параметров автодороги//IT & Транспорт: сб. науч. статей. Самара: Интелтранс, 2014. Т. 1. С. 33-40.
- Технология Data Mining в задачах прогнозирования развития транспортной инфраструктуры/А.А. Федосеев, С.В. Михеев, О.К. Головнин//Современные проблемы науки и образования. 2013. №1. URL: http://www.science-education.ru/107-8153 (дата обращения 14.06.2015).
- Построение модели транспортной инфраструктуры на основе разнородных пространственно-распределённых данных/А.А. Федосеев, Т.И. Михеева, С.В. Михеев//Перспективные информационные технологии (ПИТ 2015): труды Международной научно-технической конференции . Самара: Издательство Самарского научного центра РАН, 2015. C. 123-126.
- Intelligent Transport Systems: Methods, Algorithms, Realization/T.I. Mikheeva . Saarbrucken: LAP Lambert Academic Publishing, 2014. 164 p.
