Угловые колебания амортизируемого объекта с активной системой демпфирования

Автор: Хамитов Р.Н., Коновалов В.Е.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 4 (25), 2009 года.
Бесплатный доступ
Исследуются угловые движения амортизируемого объекта с активной системой демпфирования на управляемых пневмоамортизаторах. Рассмотрены приближенные решения для нестационарного сейсмовоздействия и приводятся результаты численного моделирования переходных процессов с помощью прикладной программы MATLAB.
Угловые движения, активная система демпфирования, пневмоамортизатор
Короткий адрес: https://sciup.org/148176022
IDR: 148176022 | УДК: 531:519.6
Angular fluctuations of the damped object with active damping system
Angular movements of the damped object with active damping system on controlled pneumoshock absorbers are investigated. The approximate solutions for non-stationary seismic influence are considered and the results of numerical modeling of transients by means of applied program Matlab are given.
Текст краткого сообщения Угловые колебания амортизируемого объекта с активной системой демпфирования
Исследование угловых колебаний амортизируемого объекта (АО) показали, что даже при больших значениях коэффициента демпфирования в элементах подвески, достигаемых как в пассивных, так и управляемых упруго-демпфируемых элементах вызываются при больших габаритах АО недопустимые величины угловых колебаний при сейсмовоздействиях [1]. В связи с этим возникает необходимость создания активной системы демпфирования продольно-угловых колебаний АО в низкочастотной области, так как частота сейсмических колебаний основания практически совпадает с собственной частотой АО. Анализ принципиальной возможности создания такой системы сделан в работе [2]. Расчетная принципиальная схема активной системы демпфирования АО с управляемыми пневмоамортизаторами (ПА) показана на рис. 1. В качестве ПА могут использоваться как многоэлементные ПА [3], так и ПА комбинированного типа с активным подводом энергии [4].
Будем полагать, что давление в ПА будет определяться системой автоматического управления процессом актив- ного демпфирования колебаний АО. В этом случае дифференциальное уравнение угловых колебаний имеет вид
Jc ϕ..+2bl2ϕ.+2cl2ϕ= c . (1)
= P1l1Sэф - P2l2Sэф -сΔlξ-bΔlξ+2c1ηl3+2b1ηl3, где Jc – момент инерции АО относительно центра масс; c – коэффициент жесткости упругой подвески 5; b – коэффициент вязкого трения в пассивных демпферах 4 (рис. 1); l1, l2 – расстояние от центра масс до линии приложения упругих и демпфирующих сил; Zc, ϕ – обобщенные координаты; ξ – вертикальные перемещения основания; η – горизонтальные перемещения основания; c1 – коэффициент жесткости горизонтальной упругой подвески 3; b1 – коэффициент вязкого трения в демпферах 2.
Система управления должна содержать измерители угловой скорости (с использованием акселерометров), которые управляют процессами наполнения и выпуска воздуха из ПА. Структурная схема системы автоматического управления показана на рис. 2. Система управления
Рис. 1. Расчетная принципиальная схема активной системы демпфирования: 1 – амортизируемый объект;
2 – горизонтальный демпфер; 3 – горизонтальный упругий элемент; 4 – демпфер; 5 – упругий элемент; 6 – основание;
7 – ПА; 8 – акселерометр; 9 – система управления заполнения и выпуска газа из ПА с РКО
работает следующим образом. При определении логическим устройством 2, что ф > 0, реле 1 включает электромагнитный клапан ЭМК-1 на подачу воздуха под давлением из ресивера в пневмоамортизатор ПА-1 и выключает электромагнитный клапан ЭМК-2, открывая выход воздуха из пневмоамортизатора ПА-2 в атмосферу. При ф < 0 реле 2 подключает через ЭМК-1 ПА-1 на выход в атмосферу и через ЭМК-2 ПА-2 подключается к ресиверу.
Постоянная времени электромагнитного клапана много меньше времени наполнения и опорожнения объема ПА [5], вследствие чего динамика процессов ПА может быть представлена в первом приближении инерционным звеном первого порядка
Время опорожнения объема ПА при тех же условиях определяется по выражению [5]
10 = ln ^min V0—, pmax RTαfc
где c =
0,58 qNRT RT
; V 0 – объем ПА в статическом поло-
жении объекта; R – газовая постоянная.
Оценка времен t н и t о показывает, что постоянная времени звена первого порядка будет находиться в диапазоне t = 0,05…0,2 с в зависимости от объема используемой РКО ПА и рабочего давления.
Таким образом, система дифференциальных уравне-
к
W ( р ) = — т р + 1
ний, описывающих процесс наполнения и опорожнения объема ПА (без учета постоянной времени электромаг-
где к - коэффициент передачи; т - постоянная времени.
Будем полагать, что процессы наполнения и опорожнения объема РКО ПА происходят в надкритическом режиме, для которого справедливы следующие неравенства [5]:
pp
> £ кр и < £ кп, pр pa p где Р – давление в ПА; Ра – атмосферное давление; Рр – давление в ресивере.
Для адиабатического процесса при показателе адиабаты N = 1,4 и е к р = 0,589, если принять, что Р р = 1 МПа, Р а = 0,1 МПа, то максимальное рабочее давление в ПА Р max = 0,589 МПа, а минимальное Р min = 0,172 МПа. При повышенном давлении в ПА Р р = 3 МПа и Ра = 0,1 МПа максимальное рабочее давление в ПА Р max = 1,77 МПа при Р min = 0,172 МПа.
Известно, что время наполнения объема ПА при изотермическом процессе определяется по выражению [5]
нитного клапана) будет иметь вид
если ф ' > 0
если ф ' < 0
т P 1 + Р = Р р , т Р 2 + Р 2 = P a ,
т Р 2 + Р 2 = Р р , т P 1 + P 1 = P a .
. р max р min
1 =/^=, н 10αfРp TN где a = 0,7; f- площадь проходного сечения электромагнитного клапана; Т – абсолютная температура; N – показатель адиабаты.
Коэффициент жесткости РКО определяется по выражению
NPS 2 d S с =---- эф + эф р .
A V d z
Если принять в первом приближении, что величина эф мала, а объем V является линейной функцией дz относительно перемещения, то коэффициент СА можно найти по выражению
NP 1 S эф С ~ ,
А h 0
где h о – высота РКО в среднем положении.
В соответствии с последним выражением дополнительный упругий элемент (РКО ПА активной системы д емпф иров ания) имеет переменную упругость
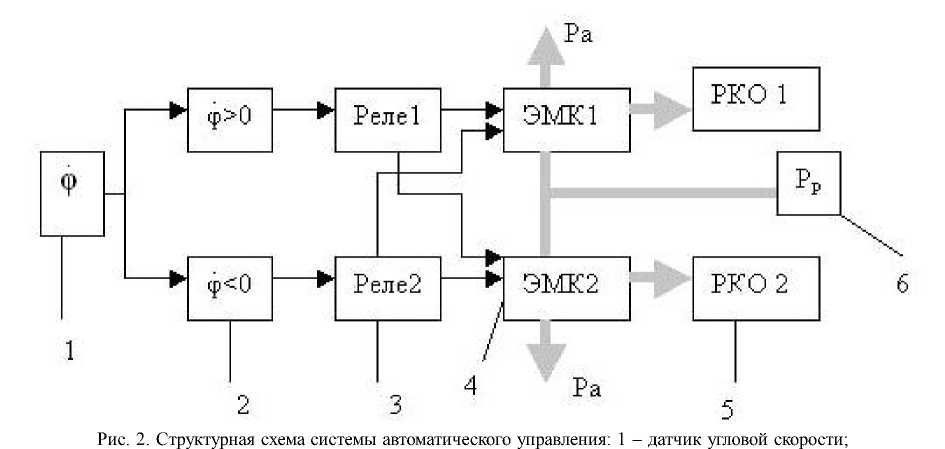
2 – логическое устройство определения; 3 – реле, переключающее подачу электрического сигнала на ЭМК-1или ЭМК-2;
4 – двухпозиционный электромагнитный клапан; 5 – ПА; 6 – ресивер системы подачи давления газа в ПА ( Р а – атмосферное давление, Р р – давление в ресивере)
и уравнение (1) с уч етом того, что L 1 = L 2 = L , пр имет вид
1 c ф"+ 2 bl 2ф'+ 2 12
-
c +
NS эф h 0
( P i + P 2 )
NS эф
( P 1 + P 2 )
= 1S эф ( P i + P 2 ) -
A 1 ^ + b A 1 ^'+ 2 qn 1 3 + 2 b i n' 1 3
Таким образом, уравнение (4) совместно с системой уравнений (3) достаточно адекватно будет описывать процесс развития угловых колебаний в АО с активной системой демпфирования.
Для анализа нелинейных уравнений (3) и (4) примем, что упруго-демпфирующая подвеска имеет коэффициент жесткости много больше, чем дополнительно устанавливаемые ПА, а процесс наполнения и опорожнения объема ПА в надкритическом режиме происходит по
одинаковому закону.
Управляющее звено в первом приближении можно представить в виде идеального релейного элемента
^( Ф ') = X maxsi g n ф ',
где х max– амплитуда перемещения релейного элемента.
При использовании акселерометров в схеме управления после интегратора установлен фильтр, передаточную функцию которого можно представить в виде
T
p p Tp + 1, где Т – постоянная времени фильтра. Фильтр подобного вида исключает ошибку из сигнала датчика, которая возникает в результате интегрирования погрешности акселерометра из-за зоны нечувствительности и неопределенности в определении центра тяжести, что может приводить к появлению в структуре полезного сигнала медленно меняющейся погрешности. С учетом вышеизложенного уравнение (4) запишем в виде
Ф '' + k 2 Ф ' + k 1 Ф+ / 1( ф ') = f ( t ), (5)
где f1(ф') = W), F1(ф) = 1SЭф(Pi + P2), ki = _ lc k2 = 2^ю0 f (t) = — (cA1 ^ + bA1 ^'+ 2c13n + 2b13 n )
I c
Структурная схема колебательной системы, соответствующей АО на упруго-демпфирующем подвесе с активной системой демпфирования в случае точного измерения угловой скорости приведена на рис. 3.
Приближенное исследование движений нелинейной системы (рис. 3) выполнено с помощью метода гармонической линеаризации [6]. Для идеального реле можно записать следующее:
x = q Ф ',
4x где q = —'—, фмах - амплитуда координаты ф. пфтах
Коэффициент линеаризации q определен в соответствии с характеристикой идеального реле.
В соответствии со структурной схемой (рис. 3) передаточная функция линеаризованной системы демпфирования угловых колебаний будет иметь вид
W ( p ) = 774 =
f ( p )
= . (6)
т p 3 + (i + к 2 т ) p 2 + ( k 2 + k i T + qk 3 ) p + k i
В нелинейной системе с релейным элементом возможны режимы с автоколебаниями. Анализ и оценка возможности возникновения автоколебаний [6] показали, что в данной системе автоколебания не возникают.
Определение вынужденных колебаний произведем для внешних воздействий вида f (t) = B sin tobt, где В и wо – амплитуда и частота внешнего воздействия.
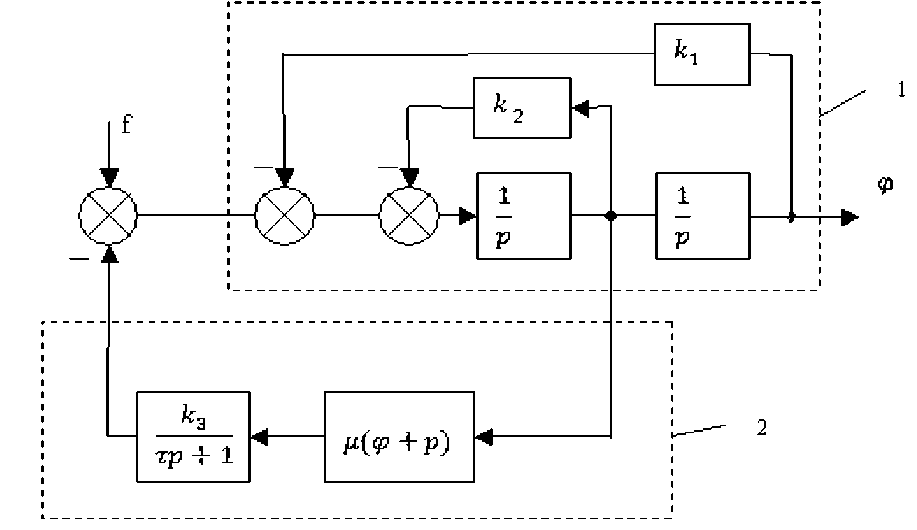
Рис. 3. Структурная схема колебательной системы: 1 – АО на упруго-демпфирующем подвесе; 2 – активная система демпфирования угловых колебаний
Вынужденные колебания АО представим в виде ϕ=ϕ m sin( ω Bt +a ).
Относительная оценка эффективности активной системы демпфирования при периодическом внешнем воздействии может быть произведена по коэффициенту η :
ϕ max 0
η= 0 , где ϕmax – амплитуда вынужденных колеба-ϕmax ний при выключенной активной системе.
Результаты расчета коэффициента h для следующих значений параметров показаны на рис. 4: K 1 = 49 1/c2, K 2 = 7 1/c, K 3 = 70 1/c, B = 100 1/c2, xm = 1 и различных значениях постоянной времени τ .
Графическая зависимость η = f ( w в) показывает, что наиболее эффективно активная система функционирует при совпадении частоты вынужденных колебаний с частотой собственных колебаний (отметим, что для любых пассивных систем демпфирования этот случай – наиболее неблагоприятный вариант).
Анализ показал, что можно всегда подобрать такие величины параметров хm, K 3. Это соответствует выбору ПА с заданной грузоподъемностью, при которых будет достигаться минимальное значение коэффициента η . Необходимо подчеркнуть, что при сейсмовоздействиях на АО колебания основания (грунта) происходят с частотой близкой к величине 1 Гц, что практически совпадает с собственной частотой АО.
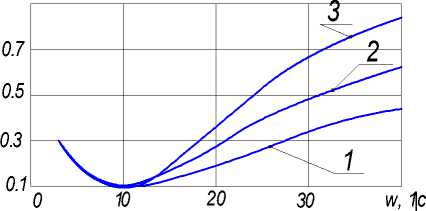
Рис. 4. Зависимости коэффициентов демпфирования от частоты: 1 – τ = 0,05; 2 – τ = 0,1; 3 – τ = 0,2
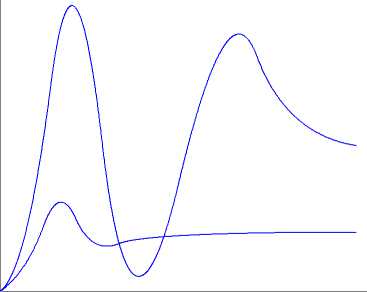
С целью анализа влияния сейсмовоздействий на угловые колебания АО с активной системой демпфирования решение системы нелинейных уравнений произведено с помощью прикладной программы MATLAB c расширением Simulink . Результаты расчета для различных значений x , K 3 и t приведены на рис. 5–6.
При сейсмовоздействиях величина амплитуды колебания по углу ϕ может быть уменьшена по сравнению с АО без активной системы в три раза, а вторые и последующие амплитуды колебаний на порядок и более . При этом, чем меньше величина τ , тем эффективнее работа активной системы, а величина K 3 может быть выбрана для рассматриваемой системы в пределах K 3 = 1,2…1,5. Подобные величины K 3 соответствуют включению дополнительного ПА с грузоподъемностью 6 × 104 Н и рабочим ходом, равным рабочему ходу ПА штатной системы амортизации АО.
Таким образом, можно сделать следующие выводы: активная система демпфирования угловых колебаний АО при гармонических воздействиях наиболее эффективна в низкочастотной области и при малых коэффициентах демпфирования штатной подвески; при сейсмовоздействиях непрерывно действующая активная система демпфирования снижает амплитуду первого колебания в несколько раз и последующих колебаний на порядок.
ф, рад
0.0 16
0.0 14
0.0 12
0.0 1
0.0 0 8
0.0 0 6
0.0 0 4
0. 0 0 2
0 0.5 1
1.5 2
Рис. 5. Угловые колебания АО при сейсмовоздействии: w o = 7, К 3 = 0,7, ξ = 0,5, τ = 0,1 с
t ,c
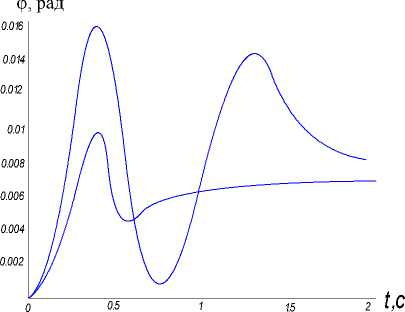
Рис. 6. Угловые колебания АО при сейсмовоздействии: w o = 7, К 3 = 0,7, ξ = 0,5, τ = 0,2 с
