Угловые колебания амортизируемого объекта с пассивной системой демпфирования

Автор: Хамитов Рустам Нуриманович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-1 (22), 2009 года.
Бесплатный доступ
Исследуются угловые движения амортизируемого объекта с упругим подвесом и пассивным демпфированием. Рассмотрены приближенные решения для нестационарного сейсмовоздействия и приводятся результаты численного моделирования переходных процессов с помощью прикладной программы Matlab.
Угловые движения, пассивная система демпфирования
Короткий адрес: https://sciup.org/148175817
IDR: 148175817 | УДК: 531:519.6
Angular fluctuations of the damped object with passive damping system
Angular movements of the damped object with passive damping system and elastic hanger are investigated. The approached decisions for non-stationary seismic influence are considered and results of numerical modelling of transients by means of applied program Matlab are resulted.
Текст научной статьи Угловые колебания амортизируемого объекта с пассивной системой демпфирования
Особое место при анализе динамики амортизируемых объектов (АО) занимают угловые движения. Крупногабаритный объект можно рассматривать в первом приближении как абсолютно твердое тело на упругом подвесе, а возмущение, действующее на объект со стороны основания, как кинематическое возмущение. В этом случае, как это следует из справочника [1], для простейшего одномерного случая прямолинейного движе- ния и при кинематическом гармоническом возмущении со стороны основания цель защиты объекта может заключаться в уменьшении амплитуды абсолютного ускорения (перегрузки) объекта. Степень реализации цели характеризуется безразмерным коэффициентом эффективности К:
К = a / (w2 хо), где a – ускорение объекта; w – частота возмущения; xo– амплитуда возмущения.
С учетом безразмерных параметров z = w / w o и n = n / w o, где w o– собственная частота колебаний объекта; n – коэффициент демпфирования в подвеске объекта. Коэффициент К имеет вид
1 + 4 u 2 z 2 К = (1 - z 2)2 + 4 u 2 z 2.
Величина К ≤ 1 обеспечивается в частотном диапазоне z ≥ √ 2. При этом эффективность виброизоляции выше, если подвес обладает малым демпфированием и, естественно, для этого случая идеальным будет подвес с n = 0. Отметим, что все вышесказанное относится, при сделанных предположениях, и к угловым колебаниям. Однако при негармонических воздействиях (типа ударная волна и т. д.) приходится разрешать очевидные противоречия:
– слабое демпфирование обеспечивает хорошую виброизоляцию при длительных гармонических воздействиях (т. е. при рассмотрении только установившихся колебаний объекта), но при единичных воздействиях в такой системе могут возникать колебания со значительной амплитудой на собственной частоте w o;
– увеличение коэффициента демпфирования наряду с уменьшением амплитуды собственных колебаний повышает величину усилия, передающегося из-за движения основания на объект через упругий подвес с демпфированием.
Вследствие вышеизложенного, решение проблемы амортизации объекта с кинематическим возбуждением представляет всегда компромиссную задачу. Эта задача, для пассивных упруго-демпфирующих элементов подвеса, решается подбором оптимальных значений коэффициентов упругости и демпфирования и может быть успешно решена для любого вида кинематического воздействия введением управляемой виброзащиты (активных виброзащитных систем) [2].
При исследовании угловых движений объекта в первом приближении можно рассматривать только плоское движение, так как взаимовлияние колебаний достаточно мало. Расчетная схема для анализа движения объекта в случае пассивных упруго-демпфирующих элементов представлена на рис. 1.
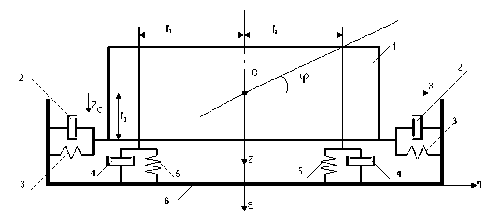
Рис. 1. Расчетная схема подвеса объекта: 1 – амортизируемый объект; 2 – горизонтальный демпфер; 3 – горизонтальный упругий элемент; 4 – демпфер; 5 – упругий элемент;
6 – основание
При составлении дифференциальных уравнений движения будем полагать, что в статическом положении сила тяжести тела с массой m уравновешена силами упругос- ти, координата Zс отсчитывается от положения равновесия, движение по координате Х не рассматривается. При таких предположениях и в случае упругих элементов с линейной нагрузочной характеристикой дифференциальные уравнения малых движений можно записать в следующем виде:
mz c =- b ( z 1 + z 2) - c ( z 1 + z 2);
Jc ϕ=- bl 1 z 1 + bl 2 z 2 - cl 1 z 1 + cl 2 z 2 + η⋅ 2 cl 3 +η⋅ 2 bl 3;
z 1 = zc +ϕ l 1 -ξ ;
z 2 = zc -ϕ l 2 -ξ , (1)
где Jc – момент инерции объекта относительно центра масс; c – коэффициент жесткости упругой подвески 5 ; b – коэффициент вязкого трения в пассивных демпферах 4; l 1, l 2 – расстояния от центра масс до линии приложения упругих и демпфирующих сил; Z c, ϕ – обобщенные координаты; ξ – вертикальные перемещения основания; η – горизонтальные перемещения основания; c 1 – коэффициент жесткости горизонтальной упругой подвески; b 1 – коэффициент вязкого трения в демпферах 2 .
Компоновка амортизируемого объекта обычно тако- ва, что центр масс практически совпадает с центром уп- ругости от элементов 5 и, как показывает проведенное исследование уравнений (1), при неподвижном основа- нии (ξ = 0, ξ = 0) коэффициенты связи продольно-угловых и вертикальных колебаний малы и можно принять допущение о независимости продольных угловых колебаний от вертикальных. В этом случае угловые колебания будут описываться дифференциальным уравнением
Jc ϕ+ 2 bl 2 ϕ+ 2 cl 2 ϕ =
=-cΔlξ-bΔlξ.+2c1ηl3+2b1η.l3, где Δl = l1 – l2 , или приводя к нормальному виду получим ϕ+2ξω0ϕ+ω02ϕ=-n1ξ-n2ξ+d1η+d2η,(3)
где ω 2 0 =
2 c 1 l 3 d 1 = ;
Jc
J ; 2ξω0 = c 2b1l3
d = .
2 J c
2 bl 2 ; Jc
cΔl n1= ; n2=
Jc
Динамика угловых колебаний для математической модели в соответствии с уравнением (3) определена для следующих параметров объекта:
L = 12 м; L 3 = 3 м; С = 1 500 кН/м; Р = mg = 1,55 ⋅ 103 кН;
Jc = 8,731 ⋅ 106 кГ ⋅ м2; w 0= 7,03 1/с; ξ = 0,5–0,7 м; Δ L = 2 м.
Параметры возмущения заданы в виде перемещения ξ основания при сейсмическом воздействии в соответствии с экспериментальным графиком записи перемещения основания (рис. 2).
Оценка угловых колебаний произведена численным интегрированием уравнения (3) правой части с помощью прикладной программы Matlab (рис. 2). Результат решения выражения (3) при сейсмовоздействии показан на рис. 3:
ξ *10–2, м.
Численное решение уравнений и их анализ в среде Matlab при различных значениях коэффициентов ξ , С и С 1, массы амортизируемого объекта, размеров L и L 3 показали, что при сейсмовоздействиях амплитуда колебаний по углу ϕ лежит в пределах 0,01…0,02 рад
(0,57…1,14о). Таким образом, вариации параметров пассивных элементов системы подвеса амортизируемых объектов не меняют существенно величин угловых коле-
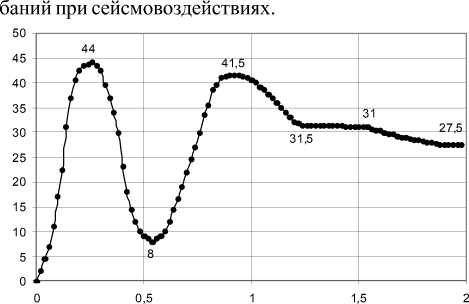
Рис. 2. График перемещения о снования
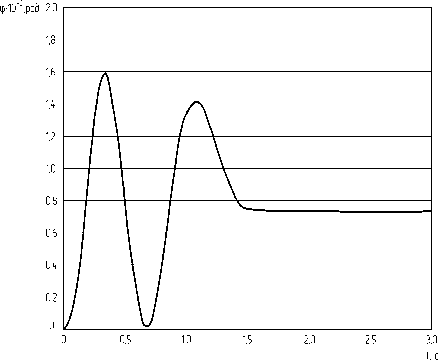
Рис. 3. График угловых колебаний АО
На основе анализа технических характеристик амортизирующего устройства разработки КБСМ (Санкт-Петербург) (максимальная грузоподъемность ≥ 300 т; максимальный рабочий ход по вертикали +350 мм) видно, что при сравнительно больших размерах объекта ход амортизатора по вертикали будет определяться суммой вертикального перемещения центра масс Zo и узлов крепления амортизаторов ϕL. При L > 10 м ход амортизатора будет превышать максимальный рабочий ход (+350 мм) данного амортизирующего устройства, что будет приводить к пробоям амортизаторов (ударамоб упоры).
Для улучшения работы амортизирующих устройств по угловым движениям целесообразно применять активные устройства. Их использование в транспортных средствах [3] и для угловой стабилизации объектов [4] дает хорошие результаты.
Таким образом, угловые колебания амортизируемого объекта cо штатной системой упруго-демпфирующей подвески при сейсмических воздействиях могут достигать величин, при которых прямолинейные перемещения упругих элементов (совместно с вертикальными перемещениями) превышают допустимые значения, поэтому для улучшения работы амортизирующих устройств по угловым движениям целесообразно применять активные устройства демпфирования колебаний.
