Улучшение системы управления транспортным средством

Бесплатный доступ
В статье описываются требования к системам рулевого управления и конструкции рулевого управления, которые позволят устранить боковое скольжение автомобиля и улучшить его устойчивость при движении на повороте. Использование этой системы позволяет уменьшить центробежный эффект, приводящий к скольжению на начальном этапе прихода в угол. Использование этой системы позволяет вам вначале вводить поворот, чтобы уменьшить эффект центробежной силы, что приводит к появлению заноса.
Трактор, рулевое управление, траектория, устойчивость движения, поворотное движение, угол поворота колеса, передаточное отношение, центробежная сила, центр масс, боковая скольжение
Короткий адрес: https://sciup.org/147124240
IDR: 147124240 | УДК: 629.3.05-514.5
Improving the system of vehicle steering
The article describes the requirements for steering systems and a construction of the steering, which would eliminate sidewise skidding of car and improve its stability when moving on turn. The use of this system allows reducing the centrifugal effect resulting in the sideslip at the initial stage of coming into corner. The use of this system allows you to initially enter the rotation to reduce the effect of centrifugal force, resulting in the appearance of the skid.
Текст научной статьи Улучшение системы управления транспортным средством
Актуальность данного вопроса обусловлена тем, что техническое состояние рулевого управления автомобиля непосредственно влияет на безопасность движения [1 ,4 ,5] . Поэтому к его состоянию предъявляются повышенные требования. Чувствительность системы рулевого управления к управлению рабочей машиной должна позволять квалифицированному оператору уверенно вести её по заданной траектории движения при выполнении всех операций, для которых предназначена данная машина.
Качество и совершенство рулевого управления автомобилем могут быть оценены с нескольких точек зрения, но наиболее важной из них является оценка с точки зрения удовлетворения эксплуатационных требований.
Рулевое управление следует считать хорошим тогда, когда оно более полно отвечает требованиям эксплуатации, основными из которых являются:
-
– надежность и выносливость в работе;
-
– возможность и простота регулировки, ремонта;
-
– легкость управления автомобилем.
Для характеристики легкости приняты следующие критерии [1] :
-
1. По рулевому механизму: а) обратимость механизма, т.е. возможность обратной передачи толчков от управляемых колес к рулевым колесам; б) потери на трение в механизме; в) характеристика изменяемости угла передаточного числа;
-
2. По рулевому приводу: а) взаимосвязь между управляемыми колесами, определяющая возможность передачи колебаний одного колеса относительно шкворня на другое; б) расположение рулевых тяг, определяющее возможность устранения колебаний управляемых колес относительно шкворни при качении этих колес относительно рамы автомобиля.
Зависимость между усилием на рулевом колесе и угловым перемещением может быть получена из выражения силового передаточного числа:
i = P р Pr ’
где i – силовое передаточное число; P – суммарная сила, приложенная к управляемым колесам и препятствующая их повороту; Р – усилие на рулевом колесе, Н.
Но известно, что сила передаточного числа есть произведение углового передаточного числа рулевого управления на отношение радиусов рулевого колеса и радиуса поворота контактной площадки управляемого колеса относительно оси поворота:
i р
RПМR i® I i® i® , r' r'
тогда
Р R
Р K
М i ®
П
®
R ,
r '
где iМ – угловое передаточное число рулевого механизма; iП – угловое передаточное число рулевого привода; R - радиус рулевого колеса, м; r ' - радиус поворота контактной площадки, м.
Суммарная сила Р может быть выражена как отношение суммарного момента на поворотных цапфах от силы Р и радиуса поворота контактной площадки управляемых колес относительно оси поворота:
F K =
Mсум r' ’
где M – суммарный момент, действующий на поворотные цапфы от сил сопротивления, Н·м.
В числе других факторов на величины M оказывают влияние и скорость автомобиля, так как при его движении на повороте возникает центробежная сила Р (рис. 1).
При равномерном движении на повороте постоянного радиуса R величина центробежной силы, приложенной к центру тяжести автомобиля, может быть найдена из общих законов механики:
Рс = МсР®\
где М – масса автомобиля, кг; ρ – радиус вращения центра масс, м; ω – угловая скорость автомобиля, рад/с.
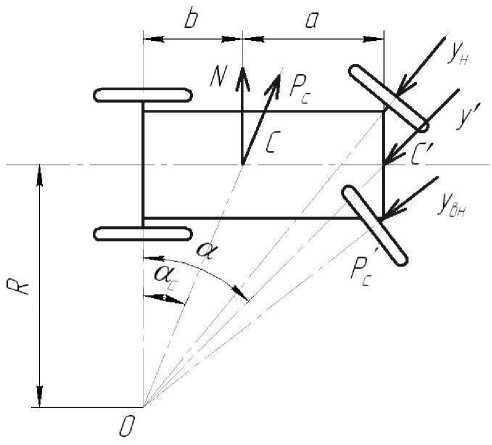
Рисунок 1 - Силы, действующие на автомобиль при движении на повороте
Масса автомобиля определяется по формуле:
Мс = G0 , g где G – вес, Н; g - ускорение свободного падения, м/с2.
Радиус вращения центра масс определяется из выражения:
ρ = ОС = R , (5)
cosα где R – радиус поворота до середины задней оси, м; α – угол, образованный радиусами R и ρ.
Угловая скорость определяется из условий движения по выражению:
ω = Vc R
.
Тогда:
Рc = G 0 ⋅ Vc . (6)
gR cos α
Чудаковым Е.А. установлено, что составляющая N центробежной силы Р распределяется между задними и передними колесами примерно в том же соотношении, что и его вес [5]. Причем действуют эти распределенные силы на высоте центра тяжести, следовательно, может быть определена центробежная сила P′ , действующая на переднюю ось, по формуле:
Pc ′ = Pc ⋅ cos α c ⋅ b ⋅ 1 . (7)
a + b cos α
В результате действующей силы P ′ появляется реакция y ′ , слагающие y ′ и y ′ и которой действуют соответственно на наружные и внутренние колеса.
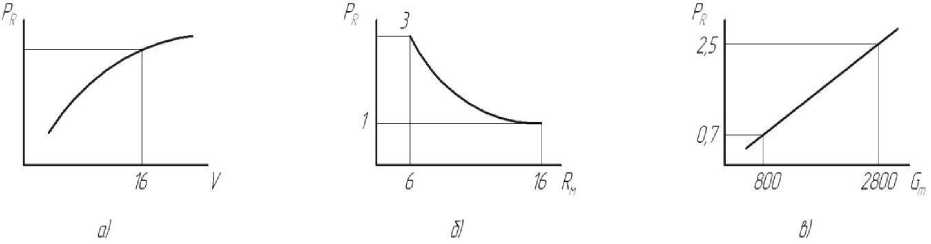
Рисунок 2 - Влияющие скорости движения ( а ), радиуса поворота ( б ) и веса машины ( в ) на усиление поворота ( P )
На повороте движение может быть как равномерным, так и неравномерным.
Причина неравномерного движения обуславливается боковой устойчивостью (рис. 3).
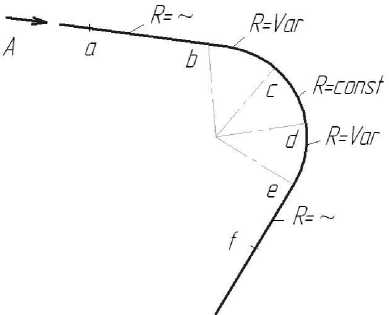
Рисунок 3 - Траектория движения автомобиля на повороте: α - с – поворот рулевого колеса; с - d – устойчивое положение рулевого колеса; d - f – выход из поворота
Переходные участки траектории с переменным радиусом R неизбежны, так как на поворот рулевого колеса затрачивается время t , в течение которого автомобиль совершает движение.
Как известно, под боковой устойчивостью автомобиля на повороте понимается не его опрокидывание, а занос. Оценивается боковая устойчивость величиной боковых реакций.
Авторы исследований в области теории автомобиля [4, 5] дают следующее аналитическое выражение для боковых реакций с учетом переменности угла поворота управляемых колес, при прохождении автомобилем всех участков траектории поворота:
aV2 ab - p2 1 aVa Va da у. = М_--a— + M„---— (---a +---—a---
R ( a + b ) a + b R dt cos2 a ( a + b ) dt
У 1 = М а •
aV a2
R ( a + b )
b 2 + p 2 1 aVa
+ M --— (--- a
a
Vac . da). i cos2 a(a + b) dt cos a
где M – масса автомобиля, кг; V – минимальная скорость автомобиля, км/ч; α – угол поворота управляемых колес, град.; R – радиус поворота до середины задней оси, м; a , b – расстояние до центра тяжести от осей, м; у , у – боковые реакции на задние и передние колеса, Н.
На участке b - с
dα
является положительной величиной, поскольку угол dt поворота возрастает, а это способствует увеличению реакций. Если при этом автомобиль идет со скоростью V, близкой к критической, то есть боковые реакции находятся в пределах их максимальных значений:
У 2 = G2^, У1 = b1^, где ϕ – коэффициент сцепления колеса с дорогой при боковом скольжении, то при дальнейшем увеличении этих реакций, за счет положительного значения α , dt произойдет занос. Поэтому для сохранения устойчивости движения необходимо dα снизить скорость движения, то есть положительное значение следует dV компенсировать отрицательным значением a . Следовательно, на участке b-с dt автомобиль должен замедляться. На участке d-е происходит обратное явление и автомобиль может набрать ускорение движения, чтобы восстановить потерянную скорость.
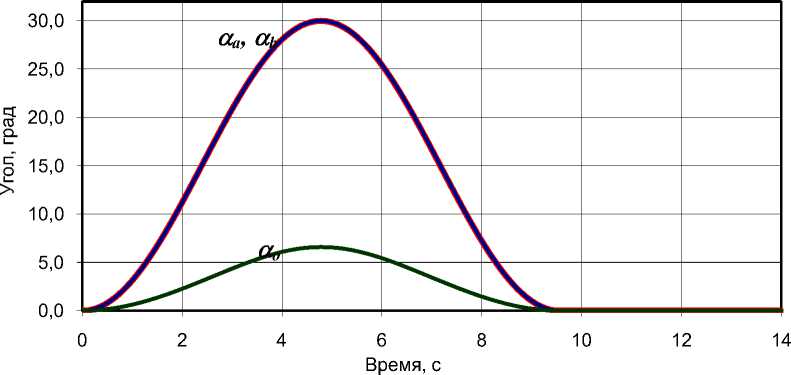
Рисунок 4 - Гармонический закон изменения углов поворота управляемых колес: α а и α b – углы поворота управляемых колес; α o – угол между продольной осью автомобиля и направлением движения центра масс
При переходе с одного участка поворота на другой возникает скачок сил, который может быть связан с резкими изменениями условий движения автомобиля при повороте. Анализируя зависимости (8, 9) и передовой опыт систем рулевого управления, можно сделать вывод о том, что применение системы рулевого управления [3] позволяет осуществлять различные способы поворота в одном транспортном средстве, что улучшит устойчивость его движения и маневренность. Используя предложенную систему рулевого управления при плавном изменении углов управляемых колес по гармоническому закону [2] , как показано на рисунке 4, можно достичь плавного изменения сил действия колес на дорожное покрытие, что приведет к устранению вероятного возникновения заноса на повышенных скоростях движения.
Следовательно, при проектировании систем рулевого управления необходимо руководствоваться тем, что они должны обеспечивать плавное изменение углов поворота управляемых колес, тем самым снижая нагрузки на колеса в переходные моменты при совершении поворота.
Список литературы Улучшение системы управления транспортным средством
- ГОСТ Р 51709-2001. Автотранспортные средства. Требования безопасности к техническому состоянию и методы проверки. -Москва: Стандартинформ, Актуальность 27.01.2015. -78 с.
- Козлов, Д.Г. Снижение динамической нагруженности почвы при криволинейном движении комбинированного МТА на базе трактора тягового класса 2: дис…канд. техн. наук/Д.Г. Козлов. -Мичуринск-Наукоград, 2013. -146 с.
- Пат. 2277488 Российская Федерация, МПК7 С1 7В 62 Д 7/14. Система рулевого управления транспортного средства со всеми управляемыми колесами/А.Н. Беляев, В.А. Калашник, Е.М. Попов, Д.Г. Козлов, В.И. Крюков; заявитель и патентообладатель Воронеж. ВГАУ. -№2277488 опубл. 10.06.2006. Бюл. №16. -7 с.
- Тарасик, В.П. Теория движения автомобиля. -Санкт Петербург: БХВ-Петербург, 2006. -478 с.
- Чудаков, Е.А. Теория автомобиля. Устойчивость автомобиля против заноса/Е.А. Чудаков. -Москва: Академия Наук СССР, 1944. -292 с.
