Управление автономным подводным аппаратом хорошо обтекаемой нецилиндрической формы

Автор: Смирнов М.Н., Смирнова М.А.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Физико-математические науки
Статья в выпуске: 9-4 (96), 2024 года.
Бесплатный доступ
Автономные подводные аппараты играют огромную роль в проведении современных исследований в самых разных областях знаний, таких как океанология, экология, климатология и многих других. Кроме того, без подводных аппаратов невозможно представить проведение картографических, поисковых, мониторинговых работ. Особенно востребованными являются необитаемые подводные автономные аппараты, которые не требуют присутствия оператора и способны добраться туда, куда человек попасть не может. Перед подобными аппаратами постоянно ставятся новые цели, что требует разработки новых и улучшения существующих методов создания автоматических систем управления. Формированию управления для одного из таких аппаратов и посвящена данная статья.
Управление, подводный, аппарат
Короткий адрес: https://sciup.org/170207282
IDR: 170207282 | DOI: 10.24412/2500-1000-2024-9-4-275-279
Control of an autonomous underwater vehicle with a well-streamlined non-cylindrical shape
Autonomous underwater vehicles play a huge role in conducting modern research in a wide variety of fields of knowledge, such as oceanology, ecology, climatology and many others. In addition, it is impossible to imagine carrying out cartographic, search, and monitoring work without underwater vehicles. Uninhabited underwater autonomous vehicles are especially in demand, which do not require the presence of an operator and are able to get where a person cannot get. New goals are constantly being set for such devices, which requires the development of new and improvement of existing methods for creating automatic control systems. This article is devoted to the formation of control for one of these devices.
Текст научной статьи Управление автономным подводным аппаратом хорошо обтекаемой нецилиндрической формы
Автономные подводные аппараты играют огромную роль в проведении современных исследований в самых разных областях знаний, таких как океанология, экология, климатология и многих других. Кроме того, без подводных аппаратов невозможно представить проведение картографических, поисковых, мониторинговых работ. Особенно востребованными являются необитаемые подводные автономные аппараты, которые не требуют присутствия оператора и способны добраться туда, куда человек попасть не может. Перед подобными аппаратами постоянно ставятся новые цели, что требует разработки новых и улучшения существующих методов создания автоматических систем управле- ния. Общие принципы управления подвижными объектами и формирования математических моделей представлены в [15]. Данная статья посвящена формированию автоматического управления для необитаемого аппарата хорошо обтекаемой нецилиндрической формы, представленного на рисунке 1.
Аппарат имеет сплюснутую форму и два тоннельных гребных винта. Подводные аппараты такой формы являются наиболее универсальными, поскольку их форма позволяет достаточно легко навешивать на них разнообразное дополнительное оборудование прямо на месте перед спуском в воду.
Рис. 1. Необитаемый автономный подводный аппарат
Нелинейная математическая модель движения подводного аппарата в горизонтальной плоскости имеет вид [6, 7]:
m
u -
vr + wq - Xg lq + r
2)+ yG(pq - r)+zg (pr+q) = X,
m
v + ur - wp +
xg (pq + r)- yG(p2 + r2)+ zg (qr- p) = Y,
mw - uq + vp + Xg (pr - q) + yG (qr + p) - zg
(p2 + q2
)]=Z.
После линеаризации и перехода от системы обозначения SNAME к обозначениям, принятых в российских исследованиях, получаем следующую математическую модель:
V z = anVz + a^ y + b i S + F,
® y = a21Vz + a22 ^ y + b2 S + M,
S = u,y = ф.
ствие; y - выход системы; F и M -внешние силы и моменты.
Рассмотрим математическую модель закона управления, который гарантирует определенную величину угла курса ф z :
Здесь Vz и My - проекции линейной и угловой скоростей соответственно на оси Oz и Oy системы координат, начало которой расположено в центре масс подводного аппарата; ф - угол курса; S - угол отклонения рулей; u - управляющее воздей- z 1 = a11z1 + a12z2 + b1Sr + g1(ф - z3), z2 = a21z1 + a22z2 + b2Sr + g2(ф - z3),
z3 = z2 + gз(ф - z3),u = P1z 1 + P2z2 + P3z3 + ^(ф - Фz )+ X.
Система уравнений, определяющая фильтрующий элемент % :
/ p = ap + ^(ф - z3 ),
X = p2,где p = ( pi p2 Рз )T.
Коэффициенты gi при этом обеспечивают биномиальное распределение корней характеристического полинома асимптотического наблюдателя с заданным пара- метром Ро = 0.6. Коэффициенты Pj являются коэффициентами скоростного закона управления.
Для скорости хода V = 1.5 м/с здесь коэффициентов: приняты следующие значения постоянных
ап = -0.3321, a12 = 1.6444, b1 = 0.1186;
a21 = 0.0633, a22 =-0.5015, b2 = 0.1141.
Отметим, что указанные коэффициенты скоростных законов получены путем решения соответствующей задачи LQR- u = -0.1828 Vz -1.5545 av - 0.6324
zy
Рассмотрим в качестве заданного движения поворот по курсу на заданный угол pz = 10 ° . На рисунке 2 и 3 представлены графики отклонения рулей и курса в процессе стабилизации аппарата при его движении в повороте по курсовому углу для скорости хода V = 1.5 м/с в линеаризованной модели, а на рисунке 4 и 5 – в не- оптимизации. Ее решение в виде управления по состоянию имеет следующий вид:
p - 0.6310 s r .
линейной модели. Этот процесс обеспечивается приведенными выше законами управления. На рисунке 4 проиллюстрированы перекладки вертикальных рулей. Рисунок 5 показывает график изменения курса p (t) с его выходом на заданный уровень.
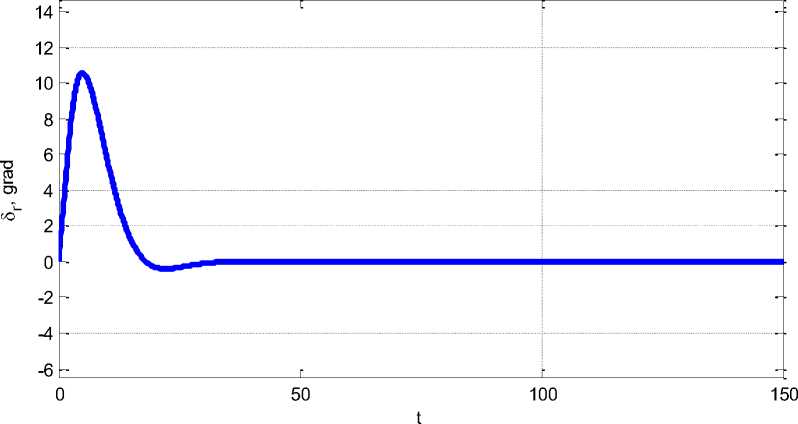
Рис. 2. Отклонение рулей в линейной модели
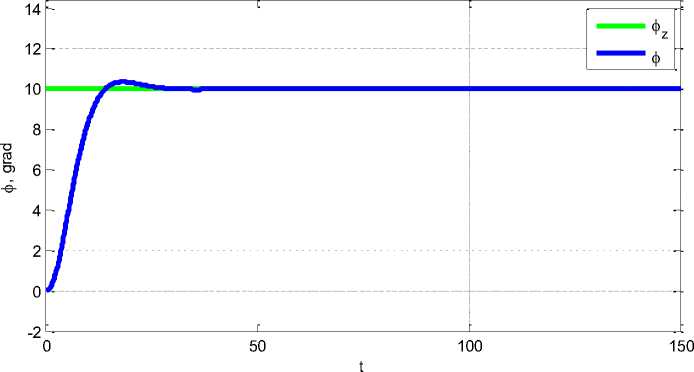
Рис. 3. Изменение курса в линейной модели
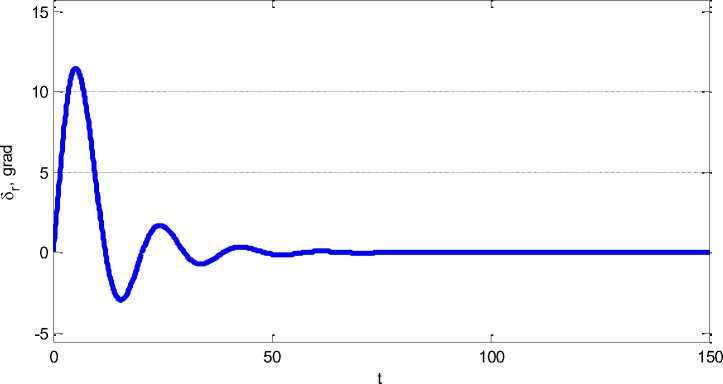
Рис. 4. Отклонение рулей в нелинейной модели
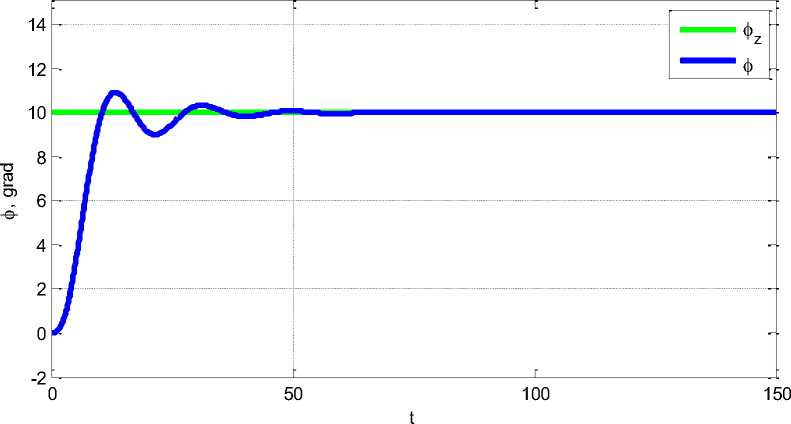
Рис. 5. Изменение курса в нелинейной модели
Из приведенных графиков видно, что на 42-й секунде угловая координата выходит на заданное значение p z = 10 ° и находится в этом положении. При этом управление, сформированное для линейной математической модели, хорошо работает и для нелинейной математической модели.
Таким образом, в данной статье представлена система автоматического управления в горизонтальной плоскости для необитаемого автономного подводного аппарата хорошо обтекаемой нецилиндрической формы. Тестирование сформированной системы управления для линейной и нелинейной математических моделей проведено в среде MATLAB.
Список литературы Управление автономным подводным аппаратом хорошо обтекаемой нецилиндрической формы
- Veremei E.I., Korchanov V.M. Multiobjective stabilization of a certain class of dynamic systems // Automation and Remote Control. - 1989. - №49. - P. 1210 - 1219.
- Веремей Е.И. Линейные системы с обратной связью. - СПб.: Изд-во "Лань", 2013. - 448 с. EDN: UGRMRR
- Веремей Е.И., Корчанов В.М. Многоцелевая стабилизация динамических систем одного класса // АН СССР. Автоматика и телемеханика. - 1988. - № 9. - С. 126-137.
- Веремей Е.И. Синтез законов многоцелевого управления движением морских объектов // Гироскопия и навигация. - 2009. - № 4. - С. 3-14. EDN: NTYAHV
- Vitrant E., Canudas-De-Vit C., Georges D., Alamir M. Remote stabilization via time-varying communication network delays // IEEE Conference in Control Applications. - Taiwan, 2004.
- Raja Rout. Control of Autonomous Underwater Vehicles. Master's Thesis, National Institute of Technology, Rourkela, 2013. - 91 p.
- Silvestre C., Pascoal A. Depth control of the INFANTE AUV using gain-scheduled reduced order output feedback // Control Engineering Practice. -2006. - P. 1-13.
