Управление движением навигационного робота мощностью приводов ведущих колес

Автор: Калинкин Михаил Николаевич, Алюшин Юрий Алексеевич, Вержанский Петр Михайлович
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 2, 2012 года.
Бесплатный доступ
Для описания движения мобильного навигационного робота использован принцип суперпозиции с описанием движений в форме Лагранжа с наложением трех простых движений. Уравнения для скоростей и ускорений получены дифференцированием уравнений пространственного движения. Угловые скорости и ускорения ведущих колес использованы в качестве аргументов при расчете составляющих кинетической энергии поступательного и вращательного движения, скорости их изменения и мощности, подаваемой на ведущие колеса. Приведены примеры управления простыми и сложными движениями робота.
Принцип суперпозиции движений в форме лагранжа, кинетическая энергия, мощность приводов, ведущие колеса
Короткий адрес: https://sciup.org/140215461
IDR: 140215461 | УДК: 531.8+681.51
Текст научной статьи Управление движением навигационного робота мощностью приводов ведущих колес
В последнее время навигационные роботы получают широкое распространение для работы в особо опасных условиях, в том числе в горной промышленности. Алгоритмы управления ими реализуются, как правило, на основе точных аналитических выражений, которые не требуют интегрирования дифференциальных уравнений и поэтому могут быть использованы при моделировании работы навигационных систем на продолжительных интервалах времени [1, 2]. В данной работе предложен один из возможных вариантов управления роботом через мощности независимых электроприводов колес с использованием описания движения в форме Лагранжа [3, 4].
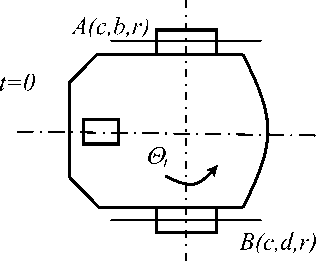
Систему отсчета наблюдателя (рис. 1а) принимаем так, чтобы в исходном состоянии оси ведущих колес робота были ориентированы вдоль оси у, а их пересечения с плоскостями симметрии колес имели координаты А(с, b, r) и В(с, d, r) . Движение робота в пространстве переменных Лагранжа можно рассматривать как наложение трех движений:
-
а) вращательного движения колес относительно собственных осей,
-
б) дополнительного вращения робота относительно оси, проходящей через произвольно выбранный полюс параллельно оси z , которое
возникает за счет разности окружных скоростей ведущих колес,
-
в) поступательного движения полюса.
y
О
a)
x
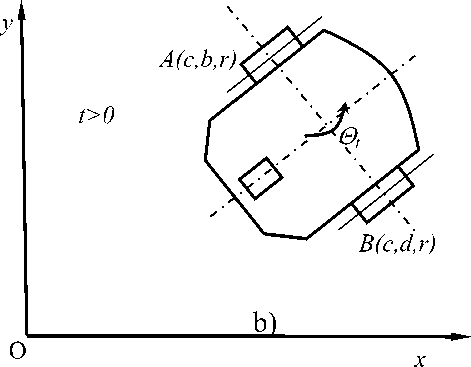
Рис 1 Исходное (a) и текущее (b) положения навигационного робота
С учетом ориентации колес в исходном состоянии, вращение принадлежащих им частиц в плоскости xOz описывают уравнения
-
x = c + ( a — c )cos А ф + ( у — r )sin А ф ,
y = β , (1)
z = r — (a — c)sin Аф + (у — r) cos Аф, где a, в, у - лагранжевы (начальные) координаты рассматриваемой частицы по направлениям осей x, y и z, соответственно.
Разность угловых скоростей ведущих колес приводит к вращению относительно оси, параллельной оси z . В качестве полюса для описания этого вращательного движения можно принять точку А. Тогда уравнения внешнего наложенного движения принимают вид
-
x = с + ( a — с )cos Аб — ( в — b )sin Аб ,
y = b + ( a — с )sin А б + ( в — b )cos А б , (2)
z = γ .
Используя принцип суперпозиции, получаем уравнения совмещенного движения для любых частиц колес А и В с начальными координатами ( a , в , у )
-
x = с + [( a — c )cos А ф + ( у — r )sin A ф ]cos А б — ( в — b )sin А б ,
y = b + [( a — c )cos А ф + ( у — r )sin A ф ]sin А б + ( в — b )cos А б , (3)
z = r — ( a — c )sin А ф + ( у — r )cos А ф .
Для частиц колеса А уравнения (3) за счет β=b принимают более простой вид x = с + [(a — c) cos Аф + (у — r) sin Аф] cos Аб,
У = b + [( a — c )cos А ф + ( у — r )sin A ф ]sin А б , (3а)
z = r — ( a — c )sin А ф + ( у — r )cos А ф .
Расстояние от любой частицы колеса В до точки А остается постоянным
( x - с )2 + ( y - b )2 + ( z - r )2 =
{ [( a - c ) cos A ф + ( y - r ) sin A ф ]cos A O - ( в - b ) sin A O } 2 +
+ { [( a - c ) cos A ф + ( у - r ) sin A ф ] sin A O + ( в - b ) cos A O } 2 +
+ [ - ( a - c )sin A ф + ( y - r )cos A^ ] =
= [( a - c )cos A ф + ( y - r )sin A ф ] 2 + ( в - b ) 2 + [ - ( a - c )sin A ф + ( y - r )cos A ф ] 2 =
= ( a - c )2 + ( в - b )2 + ( y - r )2
или
( x - a )2 + ( y - b )2 + ( z - r )2 = ( a - a )2 + ( в - b )2 + ( y - r )2 . (4)
Траектории точек А и В , ассоциируемых с осями колес, после наложения движений «а» и «б», можно найти по приведенным уравнениям с учетом указанных выше значений переменных Лагранжа. Точка А , которая принята в качестве полюса, остается неподвижной и сохраняет координаты (см. ур - ие 3а) х = с, у = b, z = r, а точка B перемещается по окружности (см. ур-ие 3)
x = с - (d -b)sin AO, y = b + (d -b)cos AO, z = r(5)
или
(х - с)2 + (у - b)2 = (d - b)2, z = r.(5а)
Будем считать, что точка А совершает поступательное движение по некоторой плоской кривой х = х(t) , y = y(t), z = r = const ^ z(t) .(6)
Платформа и ось колеса В в этом внешнем движении также перемещаются поступательно в соответствии с уравнениями х = a + uA (t) , y = в + vA (t), z = r = const ^ z(t) .(7)
Особо отметим, что если заданы угловые скорости, тогда компоненты перемещения точки А должны быть получены интегрированием линейных скоростей по времени. Поэтому в дальнейшем сначала находим скорости
( x t ) A = ^ t r cos O , ( yt ) A = ^ t r sin 0 , (8)
а затем перемещения tt tt uA (t) =J (xt) Adt = rj^t cos[0( t)]dt , vA (t) = J (yt) Adt = rJ^t sin[0( t)] dt .
0 0 0 0
Для простейших вариантов движения, например, для движения по кругу, интегрирование может быть выполнено в явном виде (см. ниже).
Уравнения совмещенного движения можно записать через компоненты вектора перемещения x = a + u(t) + [c - a + (a - c)cos Aф + (y - r)sin Aф]cos AO - (в - b)sin AO, y = b + v(t) + [c - a + (a - c) cos Aф + (y - r) sin Aф] sin AO + (в - b) cos AO, (10)
z = r - ( a - c )sin A ф + ( y - r )cos A ф .
При одновременном вращении обоих колес кинематические связи сводятся к дифференциальным соотношениям
r ( d ф - d y ) = Ld O или d O = ( r I L )( d ф - d ^ ) = ( r / L ) ф - ^ ) dt .
Отсюда находим
-
0 , = ( r I L Уф -Wt ) при L = V( x A - x B )2 + ( У а - У в ) 2 = 1 b - d I • (11)
Если изменение углов и угловых скоростей колес во времени будет известно, решение сводится к последовательному определению кинематических характеристик вращательного, а затем поступательного движения, мощности, момента и сил на осях ведущих колес
-
0, = r (Ф, - W,), 0,, = r (Ф« - Wtt), 0 = 00 + r (Ф - w),(12)
tt uA(t) = xA - aA = r Jw cos0dt, vA(t) = Уа — Pa = rJw sin 0dt •(13)
Все последующие соотношения представлены через независимые функции угловых скоростей или углов поворота, которые определяют поведение робота в любой момент времени.
Ниже приведены уравнения для скоростей и ускорений осей колес и центра масс платформы симметричного робота при rA = rB = r, а с = 0,5( « а + а в ) , в = 0,5( Д + в ) :
точка А
( x t ) A = W t r cos 0 , ( yt ) A = W t r sin 0 ,
( x tt ) A = W tt r cos 0 - W , 0 r sin 0 = W tt r cos[ r ( Ф - W )] - r- W t ( Ф - W t ) sin[ r ( Ф - W )] ,
( x tt ) A = r 1 W tt cos[ r ( Ф -W )] - r W t Ф - W t ) sin[ r ( Ф - W )] f ,
( У , ) A = W tt r sin 0 + W t O t r cos 0 ,
( У„ ) A = r 1 W tt sin[ r ( Ф - W )] + r W t ( Ф , - W t ) cos[ r ( Ф - W )] f ,
t xA = a + r J wz cos Odt,
t
Уа = P a + r J W t sin ^ ,
точка В xb = xa - (d - b)sin AO, yB = yA + (d - b)cos AO,
( x t ) в = ( x t ) A - O t ( У в - У а ) = ( x t ) A - O t ( d - b )cos 0 ,
( У , ) в = ( У , ) а + 0 , ( х в - ха ) = ( у , ) а - 0 , ( d - b )sin 0 ,
( xtt)B = ( xt)A - 0t ( d - b )cos 0 + 0 /( d - b )sin 0 ,
( У и ) в = ( Уи ) a - 0 tt ( d - b ) sin 0 - 0 , ( d - b ) cos 0 ,
( xtt ) в = ( xtt ) a - 0 tt ( У в - У а ) - 0 ° ( х в - xa ) ,
( y ,t ) в = ( y ,t ) a + 0 tt ( х в - x a ) - 0 t ( Ув - У а ) •
Для точки С из простых геометрических соотношений находим
1/ хС = 2( хА + хв ) , (х,)С = 1[(х,) А + (х,)В ] , (хи )С = |[(хи ) А + (хи )В ] ,
1/
У с = -( У а + У в ) ,
( У, ) c = 1[( У, ) a + ( У, ) в ] , ( у ,, ) c = 1[( у ,, ) a + ( у ,, ) в ] •
Составляющие кинетической энергии, характеризующие поступательное (Екп) и вращательное (Екv) движение колес и платформы, а также скорости их изменения (Wkn , WKv) для каждого элемента робота определяют уравнения:
колесо А
( E kn ) a = 0,5 m A ( r ^ t ) 2 , ( E ) a = 0,5 J a (Yt ) 2
( W kn ) A = m A ( x t x tt + ytytt ) A = 0,5 m A r2^ t = m A r'YY „ ,
(W kv ) a = 0,5 J a ( Y ) t = J A ^ t ^ tt ,
(Wk )A = (mAr2 + JA Wtt = JpAYtYtt , колесо В
( E kn ) в = 0,5 m ( x t 2 + yt 2 ) в = 0,5 m . [ r Y + ( d - b ) 2 0 2 - 2 r ( d - b>t0t ] ,
( E kv ) в = 0,5 J b ( ф , ) ,
(Wkn)В = mB (xtxtt+ У ,У tt)В = Жв {r2YYtt + (d - b)2 0t0tt - 2r(d - b)(0ttYt + 0tYtt)}, или x 2r d b - bx, 2/, d - bx_
-
( W kn ) в = mB Y Y [ Y tt - Y tt (1 + ——)] + m B ^ t r (1 +-----)(2 Y tt - Y tt ) ,
Lr
(Wkv)в = 0,5Jb(ф2)t = JвФtФtt, платформа С
-
( Ekn ) С = 0,5 m e ( x t 2 + yt 2 ) С = (1/8) m e { [ 2( x t ) A - O t ( У в - У а ) ] ' +[ 2( yt ) A + 0 ( XB - XA )Г } ,
(Ekn) с = Л me [4( xt2 + yt2) a - Yfr (d - b) + L Of], (Ekv ) c = 0,5 JO , x 1 2r1 /1 d - b_ 1 2r Д d - bx ,5 dd - bx,
-
( W kn ) c = T m c ^ t r [T Ф tt - ¥ tt (T + —— )] + T m c ^ t r [ -Ф tt (T + ——) + ^ tt (T + 2—— )]
2 2 2 L 2 2 L 2 L
,
, 2
, 2
W kv ) C = J00 = r ? ( ^ t - Y t ^)^^ >tt - Y tt ) JC = r ? J C [ ^ t ( Ф« - Y tt ) - Y t ( Ф« - Y tt )] .
При движении по прямой ( ф = Yt ) выполняются соотношения (W> . ) а = Ж а Г 2 YY,, = ( Wh ) в = т в Г 'ФЯ>„ , ( W tn ) C = Ж с Г 2YY „ = Ж с Г 2ФФ>„,
( W kv ) C = 0 .
( W kv ) A = J A ^^ n = (W kv ) B = J в Ф t Ф tt , Энергетический баланс
W e = M aY, + М в Ф , = ( W kn + W kv ) A + (W„ + W ., ) B + ( W kn + W kv ) C (14)
должен выполняться при любом соотношении угловых скоростей
-
We = mAr2 Y Y tt + mBr2 Ф [ Фи - Y tt (1 + d^b )] + mBr2 Y t (1 + d^b )(2 Y tt - Ф , t ) +
-
1 2 r1 Д d - b„ 1 2 r Z1 d - b, ,5 dd - b„
+ тЩсг Ф [- Ф> - Y ,,(- +----- )] + m/nrr Yt[-Yt (- +----- ) + Y ,,(- + 2-----)] +
CtttttCttttt r2
+ J AYtYtt + J BYYtt + "J jc ( Y t - Y t )( Фп - Y tt ) .
Обобщенные силы в виде моментов на приводных валах можно найти по уравнениям
-
2 2/, d - bx_ х 1 2т /1 d - bx z5 dd - b_
M A = m A r Y tt + m B r (1 + —— )(2 Y tt - Y tt ) + T m c r [ - Y tt (T + ——)+ Y tt (T + 2 ——)] +
L 2 2 L 2 L r ,
+ JAV u - "J J C ( Фи -Vtt ) ,
2r , d — bM 1 2г1 z1 , d — b M r . r 2 r x
M B = m B r [ ф tt - V tt (1 + )] + “ m cr [- P tt - V tt (t + )] + Jв Ф tt + "J JC ( Ф и - V tt
L 2 2 l L L
Проверку расчета проводим по выполнению баланса (14)
M a V. + M в Ф t = ( W kn + W kv ) A + ( W kn + W kv ) B + ( W kn + W kv ) c .
Расчеты проведены для нескольких вариантов изменения углов поворота и угловых скоростей ведущих колес.
Вариант 1:
, . - nt n , nt
Ф = A + A sin — , Ф = — A cos — ,
1 2 T 2 Tx 1 2 T
„ , nt n . nt
V = Bn + B , cos--- , v =-- B . sin---
0 1 2 T 2 T2 1 2 T2
P tt =
V tt
—
n
A2
V 2 T 7
. nt
A sin —
1 2 T
2 2
TT
V 2 T2 7
n t cos---- .
2 T 2
Если углы и угловые скорости изменяются пропорционально, например
V = k p , тогда получаем движение «по кругу» (рис. 2) с соотношениями
V t = k Pt , V tt = к Фи ,
П
Ф = A 0 + A jSm — ,
п , n t
Ф = —A cos— , Y. 2 T 1 2 T

п
2T
A 1
. nt sin —, 2T
rr r r
6 t = -( 9 t - V t ) = -Ф . (1 - k ) , 6 tt = -( 9 tt - V tt ) = ф^<Ри (1 - k ) ,
9 = 9 o + - ( ф - V ) = 9 o + - Ф (1 - к ) ,
t
t
uA ( t ) = xA - aA = r j V cos 9 dt = rk j cos
r
— (1 - к^p d p = L
t
t
va ( . ) = У а - P a = r j V t sin O d = rk j sin у (1 - k )> Ф d P = - L
k
1 - k
k
1 - k
sin -L(1 - k ) Ф ,
{ cos L (1 - k ) Ф - 1 ^ .
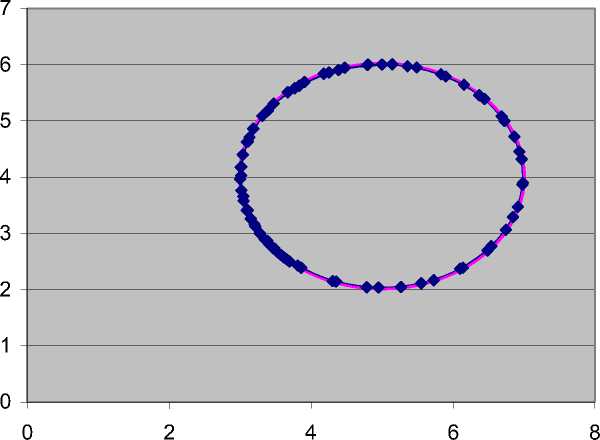
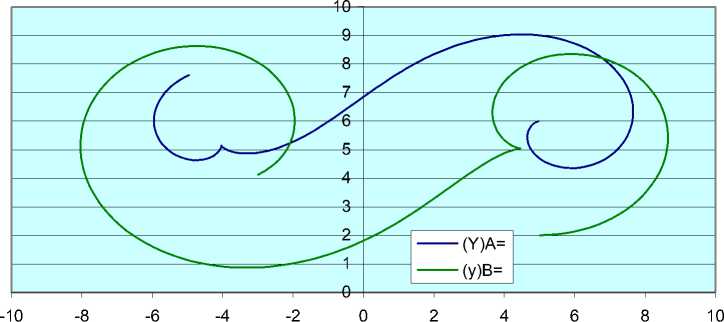
При вращении относительно центра масс (рис. 3) моменты и угловые скорости на колесах А и В равны по величине, но противоположны по знаку. Результаты расчетов для более сложных траекторий, а также соотношения моментов на ведущих колесах приведены на рис. 4 и 5.
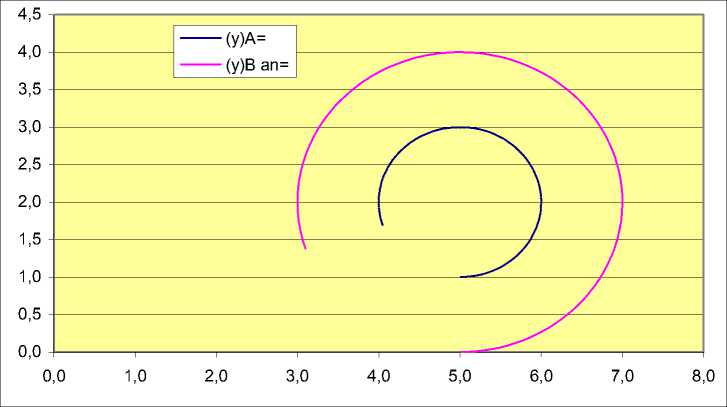
Рис. 2. Движение навигационного робота по кругу
(Y)A= (y)B=
Рис. 3. Вращение навигационного робота относительно центра масс
а)
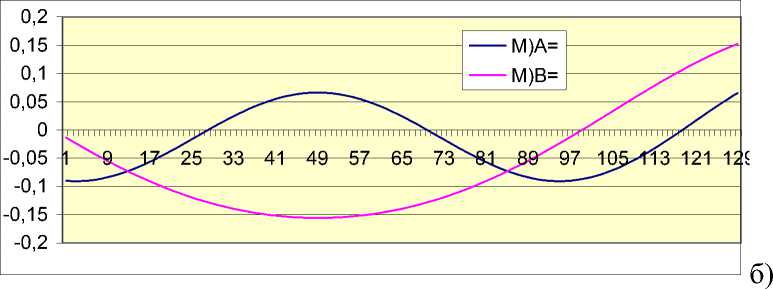
Рис. 4. Движение робота по заданной траектории (а) и соотношения между моментами на ведущих колесах (б)
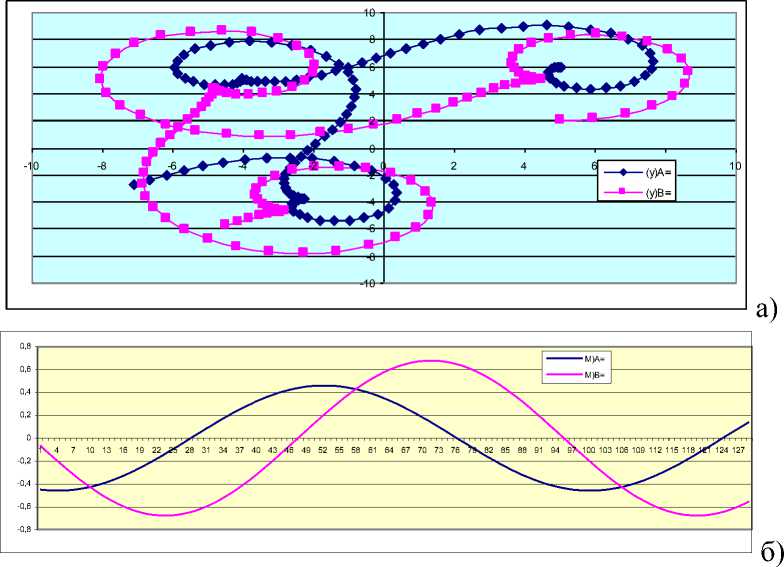
Рис. 5. Траектории точек А и В (а) при соотношении между моментами (б).
Разработанная математическая модель с окончательными зависимостями, записанными через независимые функции угловых скоростей, позволяет определить их по заданной траектории движения робота, а затем найти любые другие кинематические или динамические характеристики, в том числе необходимые для реализации заданного движения мощности, подаваемые на приводы независимых ведущих колес.
Список литературы Управление движением навигационного робота мощностью приводов ведущих колес
- Буданов В.М., Девянин Е.А. О движении колесных роботов.//ПММ, 2003. -т.67, вып.2. -С. 244-255.
- Карпов В.Э. Об одной задаче управления мобильным роботом. Труды конференции по искусственному интеллекту. -Обнинск, 2006. -В. 3-т, т.2 -М: Физматлит, 2006. -310 с., С. 719-727.
- Алюшин Ю.А. Энергетические основы механики. Учеб. пособие для вузов: -М.: Машиностроение, 1999. -192с.
- Алюшин Ю.А. Принцип суперпозиции движений в пространстве переменных Лагранжа.//Проблемы машиностроения и надежности машин, 2001. -№3. -С. 13-19.
- Алюшин Ю.А., Рачек В.М., Балахнина Е.Е. Развитие методов моделирования в механике на основе общих уравнений динамики и описания движения в переменных Лагранжа.//Отчет по НИР 122 стр. Номер гос. регистр. 01.2.006.140822. Инв. номер ВНТИЦ 02200950038
