Управление мобильным сферическим информационным роботом с тремя ортогональными маховиками

Автор: Павловский Владимир Евгеньевич, Терехов Георгий Павлович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 3, 2012 года.
Бесплатный доступ
Рассматривается новая концепция мобильных роботов − шарообразные аппараты, которые могут быть использованы для получения информации из труднодоступных мест. Проведен анализ существующих моделей таких роботов, рассмотрены различные их реализации, сформулированы возможные направления применения таких аппаратов. На основе использования теоретико-механической модели подробно изучен робот, приводимый в движение вращением трех маховиков на взаимно-ортогональных осях, при принятии гипотезы о непроскальзывании шара в точке контакта с опорой. Для этого аппарата построен алфавит базовых движений, в явном виде выписаны управляющие функции
Робот, информационный робот, неголономная механическая система, управление
Короткий адрес: https://sciup.org/14967097
IDR: 14967097
Текст научной статьи Управление мобильным сферическим информационным роботом с тремя ортогональными маховиками
В настоящее время все больший интерес представляют так называемые «нетрадиционные» робототехнические средства передвижения. Одним из вариантов таких средств является сфероробот. Подобные аппараты активно развиваются за рубежом, например, шведский Rotundus [1]. Эти аппараты в силу своей герметичной конструкции могут использоваться для исследования зон с неблагоприятной и даже агрессивной средой, например, мест аварий или зон интереса на других планетах. В задачах сбора информации с подобных объектов сферическая форма робота дает ему ряд преимуществ перед другими аппаратами. В отличие от иных моделей роботов, у робота-шара нет ни невозможных направлений движения (он омнимобилен), ни мест сопряжения узлов или частей, куда могли бы попасть загрязняющие или мешающие движению объекты, жидкости, газы из внешней среды.
Помимо упомянутого исследования мест с неблагоприятной средой, эти роботы могут быть использованы для широкого класса других задач. Одним из вариантов применения является система таких роботов - «ночных стражников» для охраны периметров или внутренних участков (например, в цехах на заводах), когда роботы объезжают вверенную им территорию по сложным траекториям или в неблагоприятных по- годных условиях, отслеживая и контролируя ситуацию. Интересен также вариант с использованием сферороботов в качестве «гидов» в современных инновационных технических музеях (такие предложения имеются). Подобные конструкции могут также служить наглядным примером для обучения принципам теоретической механики (такое направление развивается в Италии). Вышеупомянутый робот Rotundus, в свою очередь, представляет собой попытку вывода роботов из разряда концептов на коммерческий рынок. Таким образом, диапазон применения сферороботов является достаточно широким.
Роботы-шары используют различные системы приводов, наиболее интересными из них представляются те, которые используют специальные внутренние механизмы. Здесь наиболее часто используются механизмы, обеспечивающие смещение центра масс внутри робота, это системы типа маятников или системы с подвижными массами. Укажем некоторые примеры [1 - 5]. На рис. 1 показан робот Rotundus. В роботе реализован маятниковый механизм, аппарат предполагается широко использовать как охранное устройство. На рис. 2 показан робот фирмы Sony (Япония) [2]. Его отличительная особенность - управление голосом. Специалисты фирмы Sony

Рис. 1. Робот Rotundus

Рис. 3. Робот-шар с солнечным приводом

Рис. 2. Робот-шар Sony


Рис. 4. Роботы-шары с электроприводами
(батарей). Именно это делает такие роботы в определенном смысле не зависящими от внешней среды. На рис. 4 показан робот с непрозрачной оболочкой, что также интересно с конструкторской точки зрения как возможное решение для блокирования проникновения во внутреннее устройство робота. В России созданием подобных аппаратов активно занимается научно-техническая фирма RCL (Science & Technology Rover Company Ltd.), Санкт-Петербург [6], специалистами фирмы создан большой ряд моделей шаророботов с различными типами приводов.
Помимо упомянутых способов приведения робота-шара в движение интересным и важным представляется реализация робота на принципе гиростата, когда внутри робота распола- гается вращающийся маховик или маховики. В связи со сказанным вызывает интерес задача о нахождении управления для подобного аппарата. Будем согласно [7] рассматривать такую систему, в которой внутри робота расположены три маховика, их оси ортогональны и пересекаются в одной точке.
Описание модели шара с тремя ортогональными маховиками
В исследовании будут использованы две системы координат: абсолютная Sxyz , а также жестко связанная с шаром 0ξ1ξ2ξ3 Точка 0 - центр ш ара, базисны е векторы e ^ e ^ 2 e i 3 направлены по отрезкам G A 1 G A 2 G A 3 соответственно, где A1 - центр i -го маховика. Маховики предполагаются дисками, а G - точка крепления трех маховиков ( рис. 5 ). Примем в модели ряд допущений. В частности, положим геометрический центр шара совпадающим с его центром масс. Кроме того, предположим, что центры масс маховиков лежат в экваториальной плоскости и равноудалены от центра шара. Таким образом, центр масс всей системы будет находиться в геометрическом центре шара - точке 0 .
Далее, примем гипотезу непроскальзывания шара при качении его по плоскости, тем самым наложим на систему две неголономные (неинтегрируемые) связи:
x + R(p sin 0 cos у - RO sin у = 0, y + R(p sin 0 sin у - RO cos у = 0.
Выпишем уравнения Лагранжа с множителями для системы:
Jg (0 +yp sin 0)
„.2
ma
- ^y- ^6 sin 2p -y (sin 0 cos 2y + cos 0 (cosy - sin у))-
-p(cosp-sinp)+ y2^cos20 (cosy + siny) + sin2y sin 20 2
+ p2 (cosy + siny)+2yy (sin0sin2y+cos0 (cosy+ siny)) +
+ 2y0 cos 2y J + C (d\ cos у - с^ф sin у - a , cos ф -
- Ct,У COS у - Ctjy sin ycos0-
- a,у cos 0 cos у + ct3y sin 0) = - \R sin у + X2R cos у;
J 0 ( p + у cos 0 )
t sin 0 (cos p - sin p ) +
2 ma +---
+ у (sin 2p sin2 0 + sin 2 0 (cosу + siny))+
+ 0 (sin0cos2y+ cos0 (cosy-siny))J +
+ C ( c t1 sin 0 sin p + c t2 sin 0 cos p +
+ c t3 cos 0 ) = cz.
Эта система допускает аналитическое решение. Разрешая ее с учетом уравнений связи, придем к следующему результату - решению:
( M + 3 m ) X = X 1 , ( M + 3 m ) y = X 2 .
^ C t1
I a 2
= ID ^ y
+ D
' C x +( M + 3 m ) R 2' c , +( M + 3 m ) R 2
Jn (p+ycos0-y0sin0
I (a3 )
I ® z )
cz
+ ^y-|^0(cosp-sinp)+y sin0 (cosy-sin y)+ ~ sin20z .
+ 6" cos2p — у" I cos2p sin" 0 + —-—(cosy-sinyj 1 +
+2y0 (sin0sin2p + cos0 (cosp + siny))] -
-
- C (ct, - ct,y sin 0 cos p + ct,0 sin p +
-
+ d20 cos у + ct,у sin0 sin y) =
-
= X^R sin 0 cos у + Л,Л sin 0 sin у;
|
( J 0 |
ma 2 |
2 ma |
|
|
3 |
|||
|
I = |
ma 2 |
J 0 |
ma 2 |
|
"Г" |
"Г" |
|
ma 2 |
2 |
|
|
ma |
J 0 V |
|
|
3 V 3 |
3 |
|
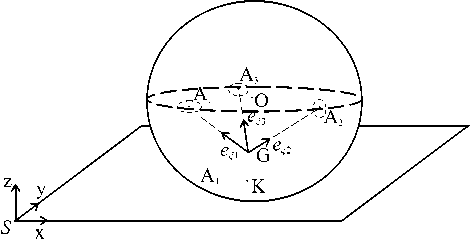
Рис. 5. Модель робота-шара с тремя ортогональными маховиками
Здесь a i - угловые скорости вращения маховиков, которые являются управлениями в задаче, θ,ψ,ϕ – кинематические углы Эйлера, задают ориентацию шара, M и m - массы шара и каждого маховика соответственно, C - главный центральный момент инерции каждого маховика относительно оси, перпендикулярной плоскости его вращения, a - расстояние от точки G до центра каждого маховика, R - радиус шара, J0 - постоянная, имеющая размерность момента инерции, cx , cy и cz - постоянные, определяемые начальными условиями, D - матрица перехода к подвижной системе координат, (У = ( yx,yy,yz) - вектор полной угловой скорости шара.
Благодаря неголономной связи можно заметить, что желаемое движение шара полностью определяется его вектором угловой скорости, т.е. для управления по какому-либо закону нужно реализовать соответствующую ему функцию ω(t) . Стоит также отметить, что x и y - компоненты вектора угловой скорости отвечают за траекторию робота в плоско-

сти, в то время как z – компонента ω(z) обеспечивает необходимое верчение (вращение вокруг вертикальной оси Sz ). Далее для простоты положим, что движение робота начинается из состояния покоя, т.е. cx = cy = cz =0 .
Базовые движения робота
В этом разделе будет построен алфавит базовых движений робота. Последовательным комбинированием этих движений можно реализовать достаточно произвольное движение шара-робота по плоскости.
Поворот на месте
В этом случае шар, а значит и связанная с ним подвижная система координат, вращаются с угловой скоростью ωz относительно вертикали, т.е. совершают чистое верчение. Пусть Ф и Θ - сферические координаты вектора e z в подвижной системе координат (долгота и широта соответственно). Эти координаты зависят от начальной конфигурации и не зависят от времени. Таким образом, искомые управления в векторном виде запишутся так:
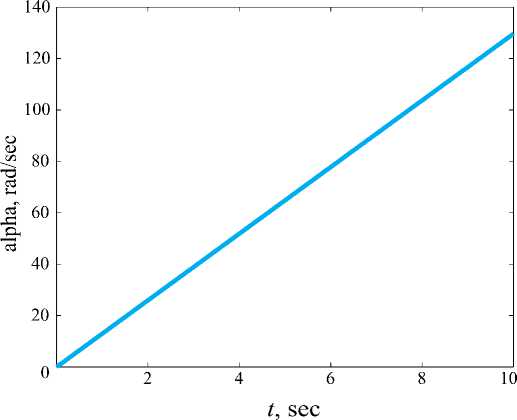
Рис. 6. Управления для поворота на месте
“1
“2
V а з 7
- ^z-I
C
( cos Ф cos 0 )sin Ф cos 0
V sin 0 ,
.
В частности, если начальное положение шара таково, что Θ = π/2 (плоскость одного из маховиков горизонтальна), для реализации поворота на месте необходимо и достаточно раскручивать его с требуемой угловой скоростью. Если же конфигурация такова, что в начальный момент времени плоскость центров маховиков горизонтальна
(0 = arcsin-^, Ф = n/4), 3
то для того, чтобы повернуться на месте, нужно раскручивать все маховики с одинаковой угловой скоростью.
Приведем для последнего случая графики угловых скоростей маховиков при следующих параметрах ( рис. 6 ): М = 4 кг, m = 0,612 г, R = 0,2 м, r = 0,05 м ( r - радиус маховика), ε = 0,2 рад/с2 - постоянное угловое ускорение шара.
Напомним, что здесь все три управляющие угловые скорости одинаковы.
Движение по прямой
Без ограничения общности рассмотрим движение вдоль оси Sx . Ограничимся случаем, когда верчение отсутствует, т.е. ω = ωy (шар вращается и катится только относительно оси Sy ). Как и в предыдущем пункте, введем аналогичные сферические координаты, только на этот раз для вектора e y . В векторном виде выражения для управлений будут следующими:
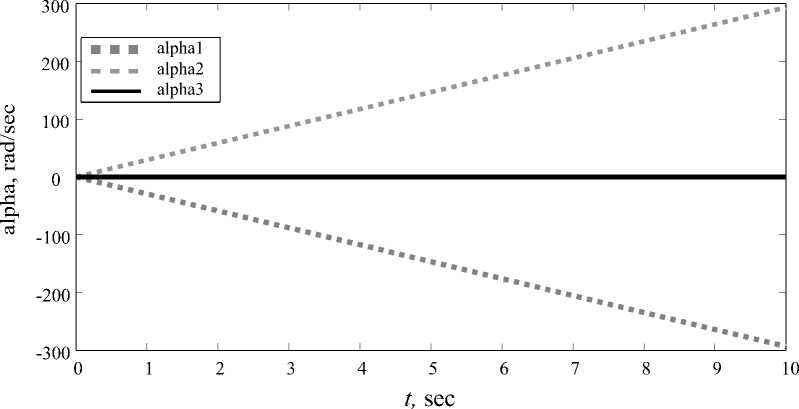
Рис. 7. Управления для движения по прямой

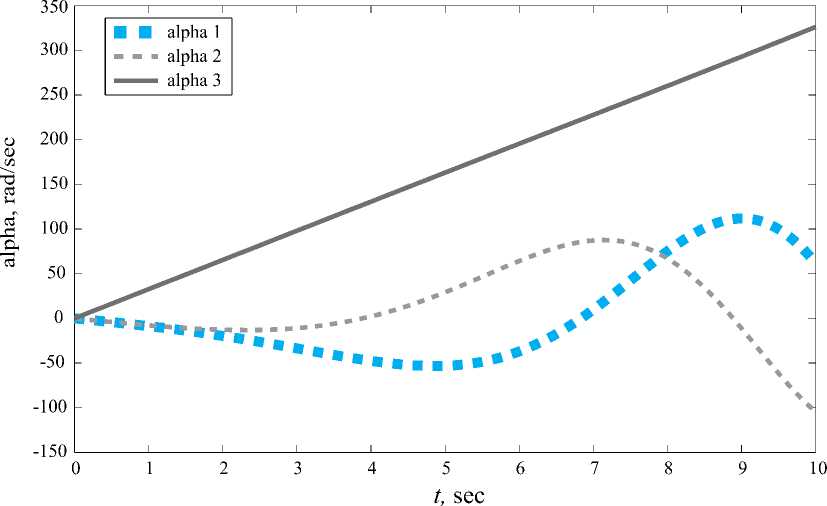
Рис. 8. Управления для движения по окружности
“1
“2
V a з 7
- ^y- [ I + (M + 3 m) R2 E ]
( cos Ф cos 0 )
Sin Ф cos 0
V sin 0 7
.
В частности, в случае если ось Sy параллельна плоскости одного из маховиков ( Θ = 0 , Φ = -π/4 ), получаем, что этот маховик неподвижен, а оставшиеся два вращаются в противоположные стороны с одинаковой по модулю угловой скоростью. Под этот случай попадает уже отмеченная конфигурация шара, когда плоскость, содержащая центры маховиков, горизонтальна.
Графики для этого случая (все параметры такие же, как и в предыдущем разделе, кроме углового ускорения, которое вдвое меньше) приведены на рис. 7 .
Движение по окружности
Рассмотрим равноускоренное движение по окружности с угловым ускорением. Здесь аналитическое решение будет достаточно громоздким, поэтому приведем лишь графики ( рис. 8 ) угловых скоростей маховиков при следующих параметрах: постоянное угловое ускорение шара ε = 0,1 рад/с2. Радиус окружности равен 0, 8 3 м. Массово-инерционные и геометрические характеристики неизменны.
Заключение
В работе предложены схемы управления для робота-шара с маховиками. Получены выражения для управлений произвольного заданного движения шара по плоскости в неголономной постановке, кроме того, разобран ряд частных случаев. Все полученные аналитические соотношения для конкретных управлений верифицированы математи- ческим моделированием в среде пакета «Универсальный механизм» [8]. Модель в «Универсальном механизме» отличалась от рассмотренной аналитически неголономной, модель контакта шара с плоскостью описывалась соотношениями модели Кельвина-Фойгхта, т.е. среда качения была вязко-упругой, деформируемой с малыми деформациями. Но предложенные в работе функции управления оказались работоспособными и в такой постановке, тем самым моделирование подтвердило полученные в работе результаты.
Работа показала принципиальную осуществимость робота-шара с маховиками.
В дальнейшем предполагается более полное исследование влияния свойств контакта «шар-плоскость» на динамику движения робота, рассмотрение обратных задач по синтезу управления робота в конкретных редуцированных (частичных) постановках - от соответствующего траекторного синтеза к вычислению управляющих напряжений для приводов шара.
Предполагается также изучение следующих вопросов:
-
□ синтез управления при ограничениях на управляющее напряжение двигателей робота (приводов маховиков) и связанных с этим ограничениях на функции управления;
-
□ синтез управления для движения по реальной слабонеровной поверхности;
-
□ изучение влияния смещения центра масс системы от идеального расположения в центре шара;
-
□ изучение влияния на динамику системы эффекта подтормаживания маховиков, полный траекторный синтез.
Начаты эксперименты с прототипом шара-робота, показанным на рис. 9 .

Рис. 9. Электромеханический прототип шара-робота с маховиками
Список литературы Управление мобильным сферическим информационным роботом с тремя ортогональными маховиками
- Электронный ресурс http://www.rotundus.se/
- Электронный ресурс http://news.bbc.co.uk/2/hi/science/nature/1898342.stm
- Электронный ресурс http://www.robotliving.com/robot-news/solar-robot-ball/
- Электронный ресурс http://vimeo.com/
- Электронный ресурс http://www.slashgear.com/project-413-makes-xkcd-robot-hamster-a-reality-video-1465950/
- Электронный ресурс http://rovercompany.ru
- Г.П. Терехов. Управление шаром с тремя маховиками на ортогональных осях./Современная мехатроника. Сборник научных трудов Всероссийской научной школы, г. Орехово-Зуево, 22 -23 сентября 2011. -с. 126 -130. -Изд. Орехово-Зуево, РосНОУ, ЗАО «Телеком-Сервис».
- Погорелов Д.Ю. О численных методах моделирования движения систем твердых тел./Журнал вычислительной математики и математической физики, 1995. -№ 4. -С. 501 -506.
