Управление мощностью синхронной машины с маховичным накопителем энергии

Автор: Блинников М.Е., Пантелеев В.И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 4 т.19, 2026 года.
Бесплатный доступ
В работе предложена система управления активной и реактивной мощностью синхронной машины с маховичным накопителем энергии. Система управления активной мощностью учитывает запас кинетической энергии вращения маховика, не имеет обратной связи, не зависит от конструкции синхронной машины, но требует точного учёта параметров маховика и характеристик потерь мощности в накопительном комплексе. Система управления реактивной мощностью основана на математической модели неявнополюсной ненасыщенной синхронной машины, не имеет обратной связи, но учитывает параметры синхронной машины. Полученная система управления проверена на имитационной модели явнополюсной синхронной машины в среде SimInTech. Наибольшая погрешность при задании активной составляющей тока – 2,18 %, наибольшая погрешность при задании реактивной составляющей тока – 38 %, наибольшая угловая погрешность 12°. Предложенная система управления активной мощности может быть использована для управления как серийными явнополюсными и неявнополюсными машинами, так и машинами с постоянными магнитами. Для повышения точности регулирования реактивной мощности возможно применение замкнутой системы управления с обратной связью.
Маховичный накопитель энергии, обратимый преобразователь энергии, система управления, синхронная машина, имитационное моделирование, SimInTech-модель
Короткий адрес: https://sciup.org/146283304
IDR: 146283304 | УДК: 621.31, 621.3.072
Power Control of a Synchronous Machine with a Flywheel Energy Storage
The paper proposes a control system for the active and reactive power of a synchronous machine with a flywheel energy storage. The active power control system takes into account the reserve of kinetic energy of the flywheel rotation, has no feedback, does not depend on the design of the synchronous machine, but requires precise consideration of the flywheel parameters and the characteristics of power losses in the storage complex. The reactive power control system is based on a mathematical model of a non-salient-pole unsaturated synchronous machine, has no feedback, but takes into account the parameters of the synchronous machine. The obtained control system was tested on a simulation model of a salient-pole synchronous machine in the SimInTech environment. The maximum error in setting the watt current was 2.18 %, the maximum error in setting the wattless current was 38 %, and the maximum angular error was 12°. The proposed active power control system can be used to control both standard salient-pole and non-salient-pole machines, as well as machines with permanent magnets. To improve the accuracy of reactive power regulation, it is possible to use a feedback-control system with feedback.
Текст научной статьи Управление мощностью синхронной машины с маховичным накопителем энергии
Цитирование: Блинников М. Е. Управление мощностью синхронной машины с маховичным накопителем энергии / М. Е. Блинников, В. И. Пантелеев // Журн. Сиб. федер. ун-та. Техника и технологии, 2026, 19(4). С. 476–488. EDN: OHYVDQ синхронной машины и преобразователя частоты [20]. Основными режимами работы ОПЭ являются пусковой режим синхронной машины, заряд накопителя или разгон в двигательном режиме и разряд маховичного накопителя или торможение в генераторном режиме синхронной машины.
Данная работа посвящена управлению мощностью синхронной машины с маховичным накопителем энергии в режиме заряда и разряда без рассмотрения пускового режима работы. С помощью синхронной машины явнополюсной и неявнополюсной конструкции возможно регулировать не только активную, но и реактивную мощность. Регулирование реактивной мощности в контуре преобразователь частоты–синхронная машина необходимо для регулирования напряжения в звене постоянного тока преобразователя частоты для его нормальной работы. Регулирование реактивной мощности электротехнического комплекса в контуре преобразователь частоты–внешняя сеть осуществляется с помощью преобразователя частоты.
Целью данной работы является разработка системы управления активной и реактивной мощностью синхронной машины с маховичным накопителем энергии.
Описание математической модели
Баланс мощности в узле подключения ОПЭ при заряде накопителя, кВт:
PGS = РМНЭ + ^ОПЭ, (1)
где P GS – переток мощности между накопительным комплексом и внешней сетью, кВт; P МНЭ – мощность потребления маховичного накопителя, кВт; Δ p ОПЭ – потери мощности в рассматриваемом электротехническом комплексе, кВт.
Баланс мощности в узле подключения ОПЭ при разряде накопителя, кВт:
“ PGS = “^МНЭ + ^ОПЭ , (2)
где P МНЭ – мощность генерации маховичного накопителя, кВт.
Мощность, развиваемая маховичным накопителем, для обеспечения требуемого перетока мощности с внешней сетью определяется выражением, кВт:
± РМНЭ = ±PGS - ^ОПЭ ’ (3)
где положительные значения величин принимаются для режима потребления мощности, а отрицательные значения для режима выдачи мощности во внешнюю сеть.
Потери мощности в обратимом преобразователе энергии представляют зависимость от загрузки комплекса и скорости вращения маховичного накопителя. В общем виде потери в электротехническом комплексе можно описать выражением, кВт:
ДРОПЭ (А ю) = АРМНЭ (Л »)+ЛРСМ (Л »)+ЛРПЧ U) + ^РСУ, (4)
где Δ p МНЭ – потери мощности в маховичном накопителе энергии, кВт; Δ p СМ – потери мощности в синхронной машине, кВт; Δ p ПЧ – потери мощности в преобразователе частоты, кВт; Δ p СУ – потери мощности в системе управления, кВт; I – ток нагрузки, А; ω – скорость вращения маховика, рад/с.
Маховичный накопитель энергии накапливает механическую энергию вращательного движения. Потребление мощности синхронной машиной и накопление энергии в маховичном накопителе обусловлены разгоном ротора с маховиком. В то же время при торможении маховика синхронная машина выдаёт в сеть запасённую в маховичном накопителе энергию, разряжая его.
Наиболее простой системой управления является разомкнутая система управления без обратных связей. Для синхронной машины регулирование скорости ротора можно выполнить с помощью регулирования частоты напряжения. Регулирование реактивной мощности осуществляется регулированием напряжения возбуждения. В общем виде требуемую систему управления можно представить в виде блока или «чёрного ящика», на вход которого подаются значения активного и реактивного тока или мощности согласно заданию, а на выходе блока формируются управляющие значения частоты напряжения статора и напряжение возбуждения (рис. 1).
Система управления

Рис. 1. Модель «чёрного ящика» системы управления мощностью
-
Fig. 1. Black box model of power control system
Изменение энергии, связанное с изменением скорости, определяется выражением, о.е.:
где T j – инерционная постоянная, с; ωн – начальная скорость вращения маховика, о.е.; ωк – конечная скорость вращения маховика, о.е.; p – количество пар полюсов синхронной машины, шт.; t б – базисное время, с.
Мощность, развиваемая маховичным накопителем, о.е.:

где Δ t – продолжительность изменения запаса энергии, с; Δ t* – то же, о.е.
Работа маховичного накопителя свыше номинальной скорости синхронной машины осуществляется при ослабленном поле, величина напряжения равна номинальной и не изменяется. В относительных единицах номинальное напряжение равно 1, поэтому свыше номинальной скорости активная составляющая тока равна активной мощности в относительных единицах, о.е.:

Выразим конечную скорость, о.е.:
Для обеспечения заданного активного тока ia маховичный накопитель должен быть на- гружен током, о.е.:
ZMH9 - za “ Д/, (9)
где Δ i – потери токовой нагрузки, обуславливающие потери мощности в электротехническом комплексе, о.е.
Закон изменения частоты имеет вид, о.е.:
где s – оператор дифференцирования.
Угловые характеристики активного и реактивного токов неявнополюсной машины соответственно, о.е.
za =—sin0, (11)
xd
. _ E a zp = — cos 0--, (12)
xd xxd где E – ЭДС взаимоиндукции, о.е.; xd – сопротивления статора по продольной оси, о.е.; U – напряжение статора, о.е.; v – частота напряжения источника энергии, о.е.; θ – угол нагрузки, рад.
Решая совместно выражения (11) и (12), угол нагрузки определяется выражением, рад:
0 = arctg---(13) z p
Требуемое напряжение возбуждения для обеспечения заданного реактивного тока, о.е.:
где r f – активное сопротивление обмотки возбуждения, о.е.; x afd – сопротивление взаимоиндукции между статором и обмоткой возбуждения, о.е.
ЭДС взаимоиндукции целесообразно определять через угловую характеристику реактивного тока (12), поскольку при задании активного тока, равного нулю, угловая характеристика активного тока (11) обращается в нуль, о.е.:
COS0
Токи синхронной машины по поперечной и продольной осям соответственно, о.е.:
■ _ ^osy _ ^^(ф + б)
1 coscp coscp
_ za sin у _ za sin(cp + 0)
^d coscp coscp где ψ – угол между током и ЭДС синхронной машины; φ – угол между током и напряжением синхронной машины; знак «минус» в выражении (17) обусловлен принятой в имитационной модели системой координат.
Для описания синхронной машины рассмотрена модель неявнополюсной машины. Данное допущение значительно упрощает конечные выражения и результаты расчётов, однако требует проверки полученных результатов для явнополюсной машины. Допущение увеличивает погрешность определения угла нагрузки (13) и, следовательно, задание напряжения возбуждения (14), ЭДС взаимоиндукции (15) и расчёт собственных токов машины (16, 17). При этом представленный закон управления активной составляющей тока не зависит от выбора математической модели синхронной машины.
Результаты численного эксперимента
Исследование режимов работы маховичного накопителя выполним с помощью имитационной модели в среде SimInTech. Математическая модель синхронной машины представлена дифференциальными уравнениями Парка-Горева в системе dq-координат [21], вращающихся синхронно с ротором машины в системе относительных единиц. В качестве источника энергии рассмотрим идеальный источник напряжения с управляемой амплитудой и частотой напряжения. В качестве синхронной машины рассмотрим явнополюсный синхронный генератор МС500–1000 с номинальным напряжением 230 В и мощностью 400 кВт [22]. Маховичный накопитель задаётся увеличенным моментом инерции на валу генератора.
Применение явнополюсных машин ограничено скоростью вращения до 1500–2000 об/мин из-за прочности крепления полюсов. Потери в накопительном комплексе представим упрощённо постоянным моментом сопротивления на валу, кВт:
Лропэ ~^c0®> (18)
где M c0 – статический момент нагрузки на валу, Н∙м; ω – скорость вращения ротора, рад/с.
Статический момент нагрузки примем по значению потерь в ОПЭ при скорости вращения маховика 1500 об/мин. В относительных единицах момент нагрузки M c0 = 0,1. Поскольку ротор синхронной машины вращается синхронно с полем, в относительных единицах скорость ротора и поля равны, ω = v .
Тогда потери токовой нагрузки, обуславливающие потери мощности в электротехническом комплексе, о.е.:
Д/=А№Э «McOv. (19)
Для проверки работы системы управления проведём ряд численных экспериментов при задании чисто активного потребления, чисто активной генерации, чисто ёмкостного и индуктивного тока, а также смешанной нагрузки, характерной для каждого из четырёх ква- – 481 –
Таблица 1. Результаты имитационного моделирования
Table 1. Simulation modeling results
На рис. 2 приведены осциллограммы фазных тока и напряжения синхронной машины в относительных единицах при задании потребления чисто активного тока 0,3 в течение 100 мс, а на рис. 3 при задании генерации чисто активного тока –0,3 в течение 50 мс. Частота напряжения сети приведена на рис. 4 и 5 соответственно для режимов заряда в течение 30 с и разряда накопителя в течение 8 с. Токи синхронной машины в dq-координатах и ток возбуждения для режимов чисто активного потребления в течение 30 с и генерации в течение 8 с приведены соответственно на рис. 6 и 7.
При задании на потребление чисто активного тока наибольшая относительная токовая погрешность составила около 2 %, при генерации – около 2,5 %. При этом при росте потребления погрешность увеличивается, а при росте генерации уменьшается. Наибольшая погрешность по углу составила чуть более 10°.
При потреблении и генерации чисто реактивных токов относительная погрешность достигала 20 % в области малых токов, снижаясь до 2–3 % при увеличении тока. При этом в области индуктивных токов смоделированное значение было меньше по амплитуде, а в области ём- – 482 –
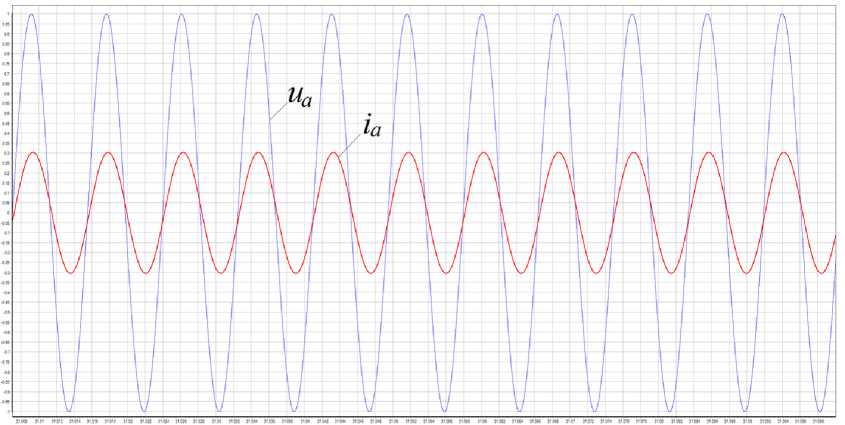
Рис. 2. Осциллограммы фазных тока и напряжения при задании на потребление чисто активного тока
-
Fig. 2. Oscillograms of phase current and phase voltage at consumption of watt current
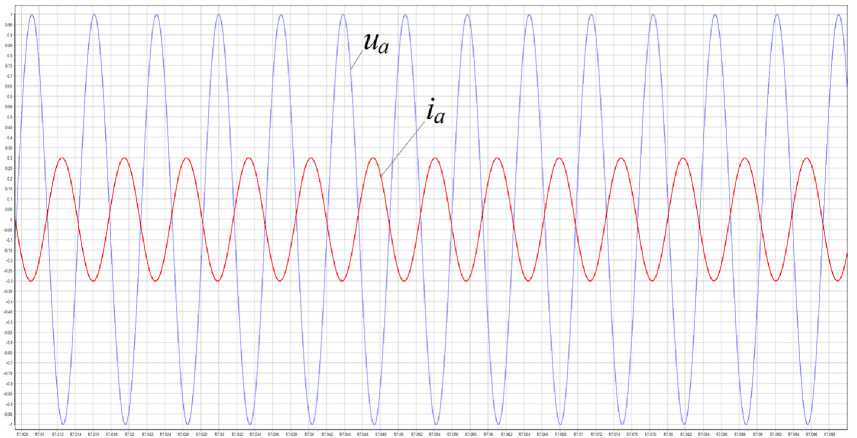
Рис. 3. Осциллограммы фазных тока и напряжения при задании на генерацию чисто активного тока
-
Fig. 3. Oscillograms of phase current and phase voltage at generation of watt current
костных токов смоделированное значение было завышено. Наибольшая погрешность по углу составила около 2°.
При исследовании смешанной нагрузки меньшая погрешность по току до 5–6 % и по углу 3,8–4,4° соответствует режимам работы при потреблении активной составляющей тока. При генерации активной составляющей погрешность по току достигает 12–15 %, а по углу до 12°.
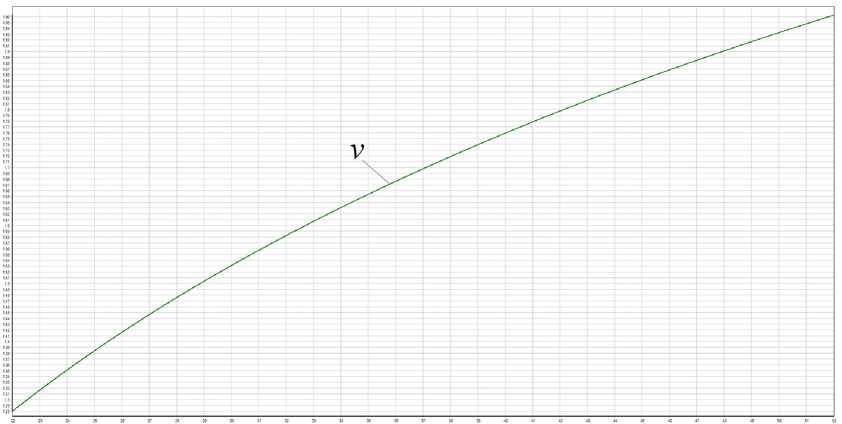
Рис. 4. Осциллограмма частоты напряжения синхронной машины при заряде накопителя
-
Fig. 4. Oscillogram of a synchronous machine voltage frequency during of storage unit charging
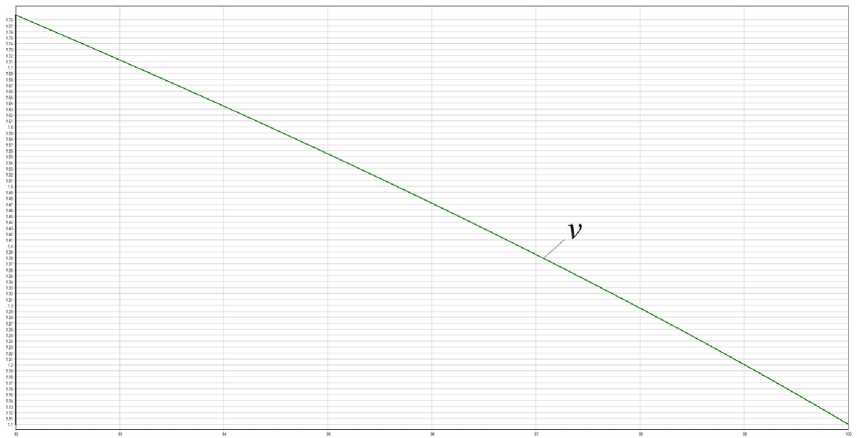
Рис. 5. Осциллограмма частоты напряжения синхронной машины при разряде накопителя
-
Fig. 5. Oscillogram of a synchronous machine voltage frequency during of storage unit discharging
Наибольшая токовая погрешность задания активной составляющей составила 2,18 % при задании чисто активного тока –0,1 в генерирующем режиме. В остальных экспериментах погрешность задания активного тока не превысила 1 %. В то же время погрешность задания реактивной составляющей достигала 38 % при смешанной нагрузке при генерации активной составляющей тока.
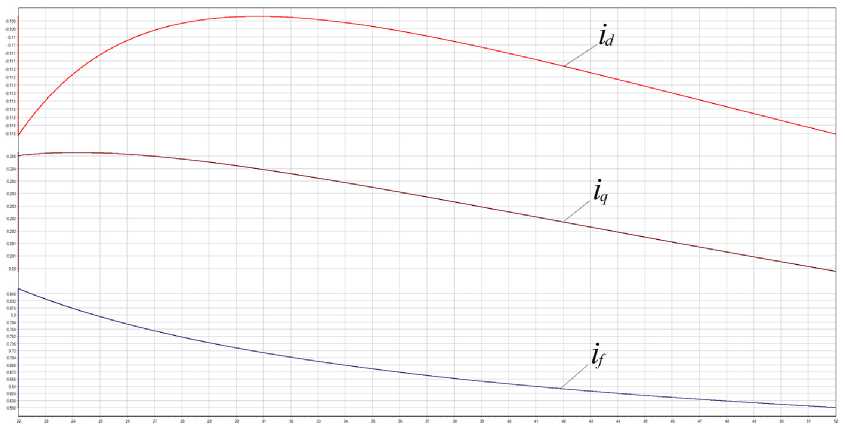
Рис. 6. Осциллограммы токов синхронной машины в dq-координатах и тока возбуждения при заряде накопителя
-
Fig. 6. Oscillograms of a synchronous machine currents in dq-coordinates and the excitation field current during of storage unit charging
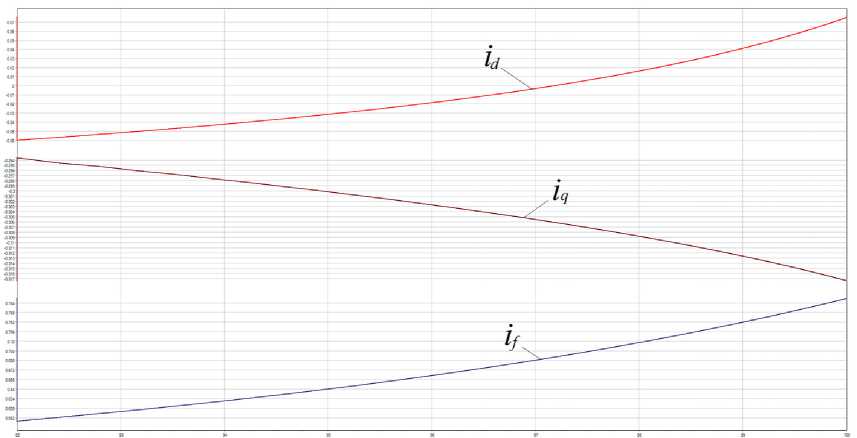
Рис. 7. Осциллограммы токов синхронной машины в dq-координатах и тока возбуждения при разряде накопителя
-
Fig. 7. Oscillograms of a synchronous machine currents in dq-coordinates and the excitation field current during of storage unit discharging
Данные отклонения могут быть объяснены как использованием упрощённой модели неявнополюсной синхронной машины для описания явнополюсной синхронной машины, так и применением формул для статического режима, в то время как частота и напряжение возбуждения – 485 – непрерывно меняются для поддержания заданных постоянных значений. В то же время закон управления частотой, полученный по выражению кинетической энергии маховичного накопителя, даёт хороший качественный и количественный результат для активной составляющей тока.
Заключение
Разработана система управления активной и реактивной мощностью синхронной машины с маховичным накопителем энергии без обратных связей. При проверке системы управления на имитационной модели наибольшая погрешность задания активной составляющей тока составила 2,18 %. Данная точность закона управления (он не зависит от конструкции синхронной машины) позволяет использовать его как для серийных явнополюсных и неявнополюсных машин, так и для машин с постоянными магнитами, применяемыми в высокоскоростных и высокоёмких маховичных накопителей. Однако для его применения необходимо знать инерционную постоянную маховика с ротором и характеристику потерь мощности в электротехническом комплексе, упрощённый учёт которых увеличит погрешность закона управления.
Закон управления реактивной мощностью разработан на основе математической модели неявнополюсной ненасыщенной синхронной машины. При проверке на имитационной модели явнополюсной ненасыщенной синхронной машины погрешность задания реактивной составляющей тока имела широкий разброс от 2 до 38 %. При этом точность управления может быть дополнительно снижена для реальных машин при их насыщении. Необходимость управления реактивной мощностью обусловлена поддержанием напряжения в звене постоянного тока преобразователя частоты. Для машин с постоянными магнитами регулирование реактивной мощности осуществляется сторонним источником реактивной мощности, который также необходим для серийных явнополюсных и неявнополюсных машин, так как предельные значения реактивной мощности синхронной машины зависят от активной мощности в соответствии с U-образными характеристиками и PQ-диаграммой. Поэтому дополнительное регулирование реактивной мощности со стороны синхронной машины имеет положительный эффект даже при значительной погрешности закона управления.
Для повышения точности регулирования необходимо применение замкнутой системы управления активной и реактивной мощностью с обратными связями. Управляющие воздействия могут быть получены в зависимости от ошибки регулирования токов с помощью ПИ-регуляторов.
