Управление полётом Российского сегмента Международной космической станции

Автор: Калашников Д.А., Коваленко А.А., Станиловская В.И.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 1 (44), 2024 года.
Бесплатный доступ
Статья содержит описание основных этапов управления полётом российского сегмента Международной космической станции: планирование полёта, реализация полётных операций, контроль полёта и анализ телеметрической информации. Рассмотрены методы и средства решения задач планирования и реализации полётных операций, отображения и анализа телеметрической информации.
Международная космическая станция, управление полётом, планирование космических полётов, полётные процедуры, командно-программное управление, контроль, анализ телеметрической информации
Короткий адрес: https://sciup.org/143182572
IDR: 143182572 | УДК: 629.786.2.014.18
International Space Station Russian segment mission control
The article describes main stages of flight control of the Russian Segment of the International Space Station, namely, flight planning, implementation of flight operations, flight monitoring and telemetry data analysis. Consideration is given to methods and techniques of solving planning tasks and implementing flight operations, displaying and analyzing telemetry data.
Текст научной статьи Управление полётом Российского сегмента Международной космической станции
20 ноября 1998 г. в 09:40 по московскому времени был запущен функционально-грузовой блок (ФГБ) «Заря», который стал первым элементом Международной космической станции (МКС). С этого запуска началась работа по управлению полётом российского сегмента (РС) МКС. Сначала полётом управляла оперативная группа управления (ОГУ) ФГБ, а после запуска служебного модуля (СМ) «Звезда» 12 июля 2000 г. — Главная оперативная группа управления (ГОГУ) РС МКС. В настоящее время завершена сборка РС МКС, который включает в себя следующие модули и космические корабли: ФГБ «Заря», СМ «Звезда», малые исследовательские модули «Поиск» и «Рассвет», многоцелевой лабораторный модуль «Наука», узловой модуль «Причал», транспортные космические корабли «Союз» и «Прогресс» различных модификаций.
Процесс управления полётом российского сегмента МКС
Процесс управления полётом РС МКС базируется на трёх основных звеньях системы управления полётом: 1) наземном комплексе управления (НКУ), 2) бортовом комплексе управления (БКУ); 3) экипаже (рис. 1). Каждое из этих звеньев стало основой для построения контуров управления полётом: контура автоматического управления 1
(управляющее звено — БКУ); контура ручного управления 2 (управляющее звено — экипаж) и контура управления НКУ 3 [управляющее звено — центр управления полётами (ЦУП)] [1].
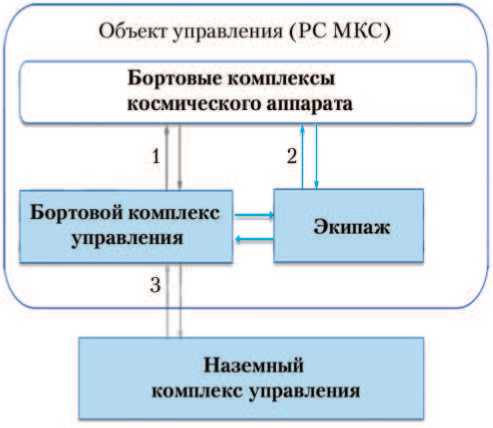
Рис. 1. Схема процесса управления полётом Российского сегмента МКС (рисунок создан авторами)
Процесс управления
полётом кос-
мических аппаратов в целом описан в известной книге В.А. Соловьёва, Л.Н. Лысенко и В.Е. Любинского [2]. В данной статье сделан акцент на реше- ние основных задач главных этапов процесса управления полётом РС МКС: планирование полёта, реализация запланированных полётных операций, контроль полёта и анализ состояния бортовых систем. Указанные задачи решаются персоналом ГОГУ РС МКС в Центре управления полётом РС МКС.
Планирование полёта РС МКС
В процессе управления полётом орбитального комплекса (ОК) РС МКС был выявлен ряд особенностей, связанных с обеспечением эффективности планирования, основными из которых являются следующие:
-
• сложность и постоянное видоизменение объекта управления;
-
• возрастание сложности задач управления, вызванной увеличением количества различных требований и ограничений, которые необходимо учитывать, иногда одновременно, увеличением количества объектов управления, участвующих в полётных операциях, влиянием одних операций на другие и т. д.;
-
• увеличение объёма поступающей с борта ОК информации, которая должна быть оперативно проанализирована в ЦУП для принятия решения по дальнейшему проведению полёта;
-
• высокая стоимость расходуемых в космическом полёте ресурсов;
-
• территориальная удалённость групп планирования международных партнёров по программе МКС, что затрудняет разработку и согласование единого плана полёта;
-
• постоянная необходимость перепланирования и принятия решений о перепланировании при дефиците времени по причине возникновения различного рода нештатных ситуаций (НШС).
Необходимость комплексного решения обусловила разработку новых методов и автоматизацию планирования полётных операций для ОК, управляемых из территориально удалённых центров с использованием наземных и спутниковых средств управления.
В планировании полётных операций МКС широко используются два альтернативных принципа — «от частного к общему» и «от общего к частному». По принципу «от частного к общему» удобно планировать полёты небольшой продолжительности, например, полёты космических кораблей типа «Союз» и Space Shuttle. При этом каждые сутки разрабатываемого плана детально «прорисовываются». На их основе составляется сводка операций, преобразуемая затем в номинальный или общий план полёта. Такой подход нашёл отражение в российских и американских документах, регламентирующих управление полётом объектов указанного типа.
Однако при планировании длительных полётов ОК этот метод не эффективен. Даже если заранее разработать все 180–200 детальных планов для полугодовой экспедиции, то их придётся значительно уточнять или переделывать в ходе полёта. Причина в том, что до начала реализации плана исходные данные планирования имеют вид вероятностного прогноза (например, даты ресурсных замен приборов и агрегатов, замен ёмкостей для воды, урины и т. д. рассчитываются по среднестатистическим данным). Данные баллистики, прихода/расхода электроэнергии, расхода топлива, воды, воздуха на этом этапе могут быть определены с существенной погрешностью. Очевидно, что переносы дат стартов транспортных и грузовых кораблей, отказы научной аппаратуры и служебных систем, прочие НШС могут основательно видоизменять первоначальные планы. Поэтому в основу технологии планирования полётных операций на МКС положен принцип «от общего к частному» [3].
Планирование — это сложный итерационный процесс, включающий в себя в т. ч. элементы переговоров, в которых задействовано много специалистов из различных уровней организационной структуры.
В результате длительного согласования международные партнёры решили создать международную группу исполнительного планирования IEPT ( International Executive Planning Team ), которая включает в себя представителей всех космических агентств — участников программы МКС. На основе опыта управления долговременными космическими станциями («Мир», «Салют») российскими специалистами предложены методы и технология планирования, которые были согласованы и приняты всеми международными партнёрами. Международной группой планирования разработаны способы обмена исходными данными и продуктами планирования. В итоге международные партнёры приняли технологию планирования, принципы которой были разработаны и апробированы при управлении российскими ОК.
Первый принцип — принцип поэтапного планирования , который заключается в последовательной разработке планов исполнительного уровня: номинального, общего и детального, другими словами, планирование «от общего к частному».
Второй принцип — принцип распределённого планирования . Он реализован следующим образом. В разработке единого плана ОК принимают участие все международные партнёры. Используя свои базы данных и программы-интерфейсы между системами планирования, стороны обмениваются информацией по планированию и создают единый план. При необходимости согласования или координации планов партнёры используют теле- и видеоконференции, электронную почту, буфер обмена (так называемый Drop Box) .
Третий принцип — принцип сепарации, который предполагает, что каждый партнёр, ответственный за свой сегмент либо модуль ОК, разрабатывает план полётных операций, которые должны проводиться на его сегменте или модуле. При этом учитываются общие правила и ограничения по планированию, доступные ресурсы, приоритеты и т. д.
Четвёртый принцип — принцип интеграции, который включает в себя три этапа. На первом этапе разработанные международными партнёрами планы направляются в тот ЦУП, который на данный момент является интегратором. На втором этапе происходит интеграция планов партнёров в единый план и его анализ по таким параметрам, как совместимость операций, распределение ресурсов, полнота информации, наличие конфликтов. На третьем этапе происходит утверждение интегрированного плана.
Все планы разрабатываются за некоторое время до реализации их на борту ОК. За период времени между разработкой и реализацией плана может возникнуть необходимость его изменения, вызванная различными причинами. Для того чтобы проанализировать эти причины и принять решение об изменении плана, введён инструмент перепланирования PPCR-tools (Planning Product Change Request). Заявка на перепланирование PPCR рассматривается специалистами в каждом ЦУП, и после согласования необходимые изменения вносятся в детальный план полёта (ДПП).
Для того чтобы каждый партнёр мог самостоятельно формировать план для своего сегмента (модуля), были разработаны регламентирующие документы (правила). К их числу относятся Основные правила и ограничения исполнительного планирования ( GGr & Cs — ISS Generic Groundrules and Constrains Part 2: Execute Planning ), Правила и ограничения исполнительного планирования для конкретной экспедиции ( Gr & Cs — Groundrules and Constraints Part 2: Execute Planning ISS Increment XX Specific ), Стандарты базы данных (документ служит для определения стандартов базы данных полётных операций, экспортных файлов, документации по планированию), ( OIP — Operations Interface Procedures ).
Первые два документа определяют правила для разработки плана. Этими планами партнёры, говорящие на разных языках, имеющие разные системы планирования, должны обмениваться, однозначно понимать друг друга. Для этого был разработан документ «Стандарты базы данных». Этот документ определяет состав параметров, описывающих полётную операцию, и параметров, характеризующих непосредственно план. Руководствуясь этим документом, каждый партнёр делает описание полётных операций своего сегмента в таблицах базы данных. Была разработана классификация полётных операций (ПО), информация о ПО была формализована. На основании этого разработана база данных полётных операций, которая содержит знания о правилах и ограничения планирования ПО.
Планы отдельных сегментов разрабатываются в виде набора данных, хранящихся в базе данных систем планирования партнёров. Для обмена информацией на исполнительном этапе планирования между международными партнёрами используются экспортные файлы со строго определённой структурой. Эти файлы становятся доступными всем партнёрам.
При разработке технологии взаимодействия специалистов разных стран в ходе управления полётом МКС необходимо было учитывать несколько факторов.
Во-первых, разницу в часовых поясах. Как правило, график работы специалистов по долгосрочному и краткосрочному планированию совпадает с графиком рабочего времени в организациях международных партнёров в разных часовых поясах. Поэтому необходимо было создать механизм взаимодействия групп планирования, при котором специалист по планированию может контактировать как с кураторами систем, научных экспериментов, руководством своего сегмента, так и с партнёрами по разработке планов, находящимися по другую сторону океана.
Во-вторых , в каждом космическом агентстве существует административная структура, которая может отличаться от структуры партнёров. Это касается в первую очередь NASA , где созданы два центра управления: в Центре им. Джонсона в Хьюстоне — ЦУП-Х, ответственный за интеграцию операций; и в Центре им. Маршала в Хантсвилле — POIC ( Payload Operations Integration Center ), отвечающий за операции по полезной нагрузке. В России управление служебным бортом и научными экспериментами происходит из одного центра — ЦУП-М в г. Королёв.
В ЦУП-Х осуществляется интеграция всех поступивших файлов с планами в единый план. Выявившиеся при интеграции конфликты разрешаются на теле- и видеоконференциях международной группы планирования.
Как уже было сказано, при составлении и корректировке планов полёта Центру планирования приходится оперировать большим количеством информации о полётных операциях, учитывать множество различных требований и ограничений. Количество полётных операций по сравнению с начальными периодами планирования увеличилось на несколько порядков.
В этих условиях решить проблему составления эффективных, гибких планов и проблему оперативной корректировки этих планов в процессе полёта МКС возможно лишь путём передачи большего числа функций автоматизированным системам планирования с использованием экспертных подсистем. Автоматизация должна охватить решение таких многократно повторяющихся задач, как анализ исходных данных, математическое моделирование, прогнозирование параметров функционирования бортовых систем, формирование и сравнение вариантов планов, распределение ресурсов, оптимизация, верификация и оценка реализуемости планов.
С формальной точки зрения задача создания планов полёта заключается в определении порядка выполнения всех работ, предусмотренных программой полёта и в установлении временного интервала выполнения каждой полётной операции в целом, и для каждого члена экипажа в частности, с учётом используемого оборудования, требуемых ресурсов, передаваемой на борт командно-программной информации. Размещение полётных операций во времени выполняется с учётом множества ограничений и условий планирования. Целью планирования является реализация задачи возможно более полного и эффективного обеспечения выполнения программы полёта с учётом имеющихся ресурсов и соблюдением установленных ограничений. Задача является многовариантной и реализуется в несколько этапов.
По результатам анализа возможных вариантов концепции планирования были выявлены составляющие этого процесса, методика выполнения которых в настоящее время реализована в автоматизированной системе планирования полёта (АСП) РС МКС и американской системе автоматизированного планирования, между которыми разработан интерфейс.
Процесс планирования исполнительного уровня делится на долгосрочное, краткосрочное, детальное планирование, перепланирование в реальном времени.
Продуктом долгосрочного планирования является номинальный план полёта (НПП) на период длительности основной экспедиции МКС, который представляет собой перечень всех ПО с учётом приоритетов, совместимости, требуемых и располагаемых ресурсов.
Продуктом краткосрочного планирования является общий план сопровождения (ОПС) — полный перечень ПО, подлежащих выполнению на планируемый период времени с указанием требуемых ресурсов и реперных точек, а также условий выполнения ПО и процедур, по которым они выполняются.
Детальное планирование — это привязка ПО и процедур к определённому моменту времени. Продуктом планирования является ДПП. Интервал детального планирования выбран равным одним суткам.
Перепланирование в реальном времени осуществляется на основе ДПП и существующей на определённый момент времени конкретной оперативной ситуации. Основанием для проведения работ по перепланированию является заявка специалистов группы управления, утверждённая руководителем полёта РС МКС.
На каждом из этапов планирования исполнительного уровня осуществляется взаимодействие и согласование планов с международными партнёрами — участниками управления МКС. Это взаимодействие обуславливает необходимость работы в единых стандартах данных по планированию с одной стороны, и использования совместимого программного обеспечения для обмена информацией — с другой [3].
Помимо непосредственного планирования работ на борту РС МКС требуется проведение анализа выполнения запланированной программы полёта. Эта работа заключается в последовательном сравнении тактического плана с НПП, НПП с ОПС, ОПС с ДПП, а ДПП — с фактической реализацией работ на борту. По результатам этого сравнения проводится корректировка соответствующих правил и ограничений планирования на различных уровнях. Схема процесса планирования на исполнительном уровне отображена на рис. 2.
Автоматизированная система планирования РС МКС строилась как развивающаяся, гибкая модульная структура, которая базируется на использовании современной сервисно-ориентированной архитектуры. В этом случае все её программные модули имеют унифицированный интерфейс, и изменение состава модулей и информационных связей между ними не приводит к необходимости переработки ранее созданной системы. Таким образом, обеспечивается возможность последующего непрерывного развития системы и наращивания её функций.
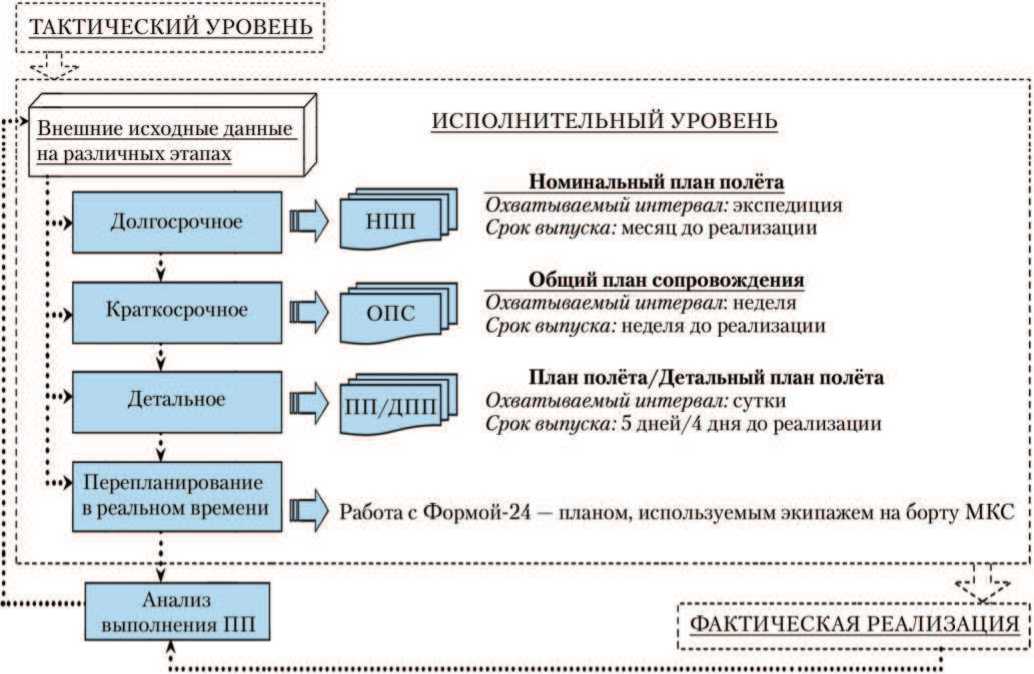
Рис. 2. Процесс планирования на исполнительном уровне (рисунок создан авторами)
Все модули АСП взаимосвязаны и составляют единую систему планирования, которая имеет возможность оперировать всеми потоками информации (рис. 3). Это позволяет создавать комплексную модель плана полёта с информационным отражением связей между входящими в неё объектами [4].
Оценка качества АСП РС МКС и создаваемых на её основе планов может проводиться по следующим критериям:
-
• степень полноты и качество формируемых на основе АСП РС МКС планов полёта;
-
• время формирования планов и степень оперативности работ, связанных с перепланированием при необходимости срочной корректировки плана;
-
• удобство пользователей — специалистов группы планирования, осуществляющих эксплуатацию АСП РС МКС;
-
• сервис, предъявляемый системой для сокращения времени выполнения операций и повышения эффективности работы;
-
• устойчивость и надёжность работы средств, обеспечивающих формирование планов полёта;
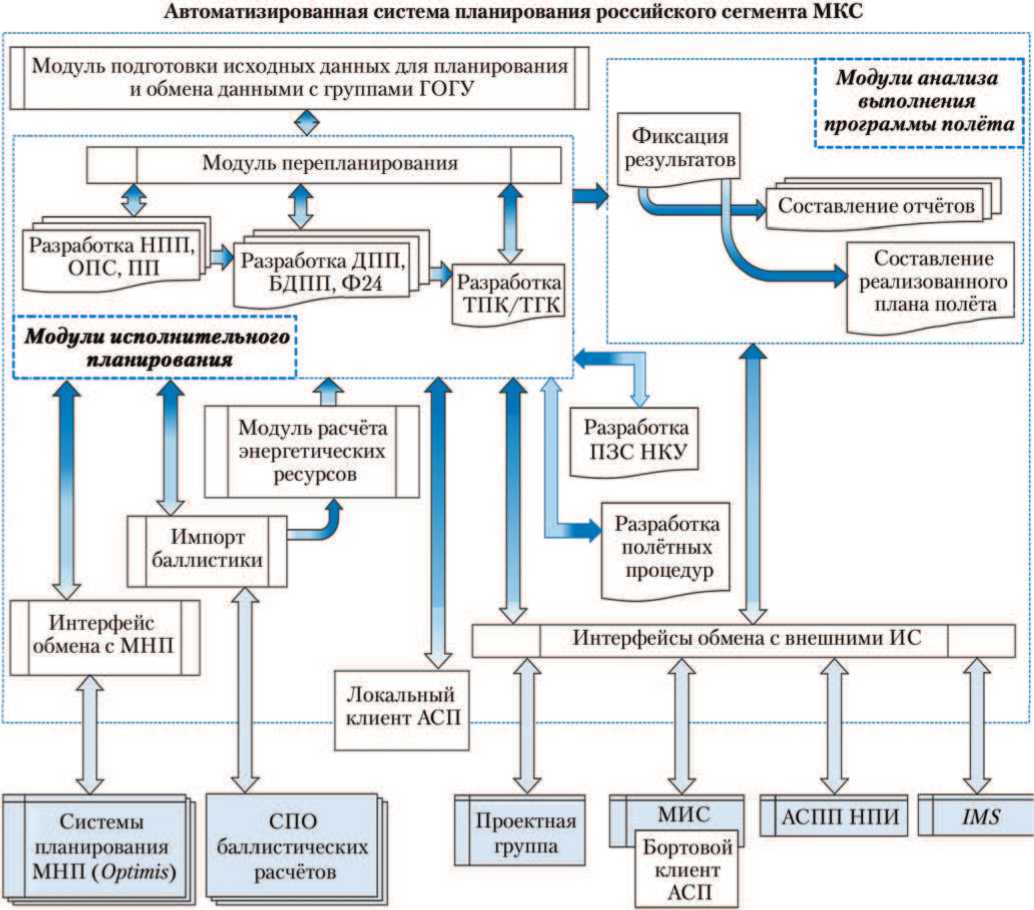
Рис. 3. Структура автоматизированной системы планирования (АСП) российского сегмента МКС: ГОГУ — главная оперативная группа управления; НПП — номинальный план полёта; ОПС — общий план сопровождения; ПП — план полёта; ДПП — детальный план полёта; БДПП — бортовой детальный план полёта; Ф24 — Форма-24, план, используемый экипажем на борту МКС; ТПК— транспортный пилотируемый корабль; ТГК — транспортный грузовой корабль; МНП — международные партнёры; ПЗС НКУ — план задействования средств наземного комплекса управления; ИС — информационные системы; СПО — специальное программное обеспечение; МИС — многофункциональная информационная система; АСПП НПИ — автоматизированная система поддержки процесса формирования и выполнения программ научно-прикладных исследований на РС МКС; IMS — система инвентаризации на борту МКС (рисунок создан авторами)
-
• своевременность и полнота предоставления информации о результатах планирования лицам, которые участвуют в разработке программы космического полёта и в реализации оперативного управления полётом;
-
• обеспечение полноценного обмена информацией с международными партнёрами в процессе формирования интегрированных планов;
-
• обеспечение в перспективе развития АСП РС МКС и расширения её возможностей на основе модульности, унификации, реализации таких архитектурных решений, которые позволят в последующем включать новые задачи, новые функциональные компоненты, не изменяя принципиально структуры ранее созданной системы.
Предложенные технические решения и разработанные подходы были в полной мере реализованы в процессе внедрения системы и её последующей модернизации. Все планы полёта исполнительного уровня разрабатываются средствами новой автоматизированной системы планирования. Новый подход к кодированию полётных операций и алгоритмы типовых автоматизированных процедур (размещения в плане одиночных и комплексных операций, проверки соблюдения правил и ограничений, привязки полётных операций к зонам видимости российских наземных измерительных пунктов и др.) используются при создании любого плана. В результате применения указанных средств время, затрачиваемое на краткосрочное и детальное планирование, сократилось. Сократилось и возникновение ошибок и случаев некорректного размещения полётных операций в плане. Особенно ощутимый эффект использования предложенных решений при разработке АСП достигается при возникновении НШС, когда появляется необходимость срочного перепланирования. Кроме того, было отмечено общее сокращение количества ошибок операторов системы в процессе выполнения работ [5].
Система автоматически определяет и отображает все изменения, предложенные партнёрами (дополнительные, исключаемые операции, изменение времени выполнения операции и других атрибутов), что даёт возможность оперативно анализировать изменения и принимать эффективные решения при согласовании планов [4].
АСП РС МКС в настоящее время успешно используется в Центре управления полётами. Внедрение и практическое использование описанных выше технических решений позволило в полном объёме выполнить поставленные задачи и обеспечить непрерывное планирование работы экипажа и бортового комплекса управления на всех этапах программы полёта. Система постоянно развивается в целях расширения функциональных возможностей и улучшения эксплуатационных характеристик.
Реализация полётных операций
Следующий этап в процессе управления полётом РС МКС — это реализация запланированных полётных операций. Многомодульные ОК с цифровым БКУ обладают широкими функциональными возможностями. Эти возможности в значительной мере обусловлены применением цифровых бортовых вычислительных систем (БВС) в качестве главного элемента БКУ. Такая расширенная функциональность требует значительного объёма информации для БВС, содержащей программу работы отдельных бортовых систем и БКУ, уставочные (исходные) данные для задания режимов и параметров систем и т. д. Эта информация ежесуточно поступает из ЦУП в БВС в составе командно-программной информации (КПИ) [6].
Необходимость оперативного (в реальном масштабе времени) формирования и ввода в БКУ разнообразных наборов программ функционирования бортовых систем возникла в период полёта ОК «Мир» в 1986–2001 гг. Именно тогда начался переход от командного управления полётом посредством функциональных и числовых команд к программному. Другими словами, командно-программное управление полётом стало переходить от командного метода к координатно-временнóму методу, суть которого заключается в том, что вектор управляющих воздействий стал функцией времени и параметров вектора состояния объекта управления. С запуском и интеграцией в состав РС МКС служебного модуля «Звезда» в 2000 г. координатно-временнóй метод управления стал основным для реализации полётных операций РС МКС. В результате произошло значительное увеличение общего объёма КПИ, разрабатываемой оперативно, т. е. в реальном времени [6].
На рис. 4 изображены потоки управляющей информации и наблюдаемых телеметрических параметров, замыкающих обратную связь. Управление бортовыми системами осуществляется, в основном, средствами БКУ по законам управления (алгоритмам в БВС) в соответствии с уставочными данными и логико-временными бортовыми программами полёта (БПП). БПП оперативно (в реальном масштабе времени) формируются персоналом управления в ЦУП и закладываются в БКУ в виде массивов КПИ посредством командно-измерительных систем (КИС).
Реализация полётных операций ОК представляет собой последовательность типовых технологических процессов, отражающих различные стадии обработки информации о плановом состоянии объекта управления, массивов управляющей информации, необходимой для приведения объекта управления в запланированное состояние, и информации о текущем состоянии объекта управления. Эти стадии представляют собой процессы детального планирования полётных операций, формирования и исполнения КПИ и контроля реализации операций.
Основным методом реализации программы полёта для РС МКС является командно-программное управление: реализация запланированных операций НКУ с использованием БВС в качестве исполняющей подсистемы и интерфейса в виде командной радиолинии (КРЛ). Под операциями в данном случае понимается совокупность управляющих воздействий на космический аппарат, «объединённыхединым замыслом и направленных на достижение заданной цели». Схематично процесс реализации полётных операций изображён на рис. 5. Исходные данные в виде ОПС, ПП и полётных процедур (ППр) используются для разработки ДПП на заданный интервал планирования (одни сутки). ДПП в виде циклограммы ПО и ППр, содержащих описание последовательности выдачи КПИ реального времени (прямого исполнения) и директив бортовых программ полёта (приборного, функционального и верхнего уровней), является набором оперативных исходных данных для формирования массивов КПИ и программ сеансов связи (ПСС) [6].
На следующем этапе осуществляется реализация сеансов связи в соответствии с запланированными ПСС. В каждом сеансе связи специалисты ГОГУ осуществляют ввод в БКУ двух видов КПИ: функциональные команды (ФК) — в систему управления бортовой аппаратурой (СУБА) и управляющие воздействия (УВ) прямого и отложенного исполнения; бортовые программы полёта (программы отложенного управления) в виде массивов цифровой информации (МЦИ) — в БВС.
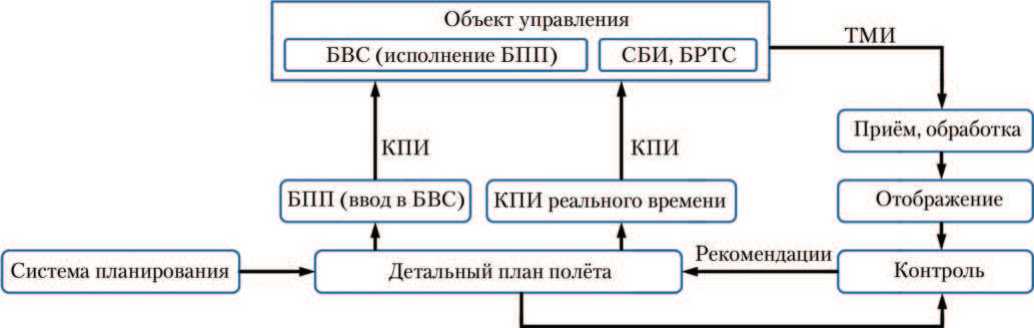
Рис. 4. Контур управления наземного комплекса управления: БВС — бортовая вычислительная система; БПП — бортовые программы полёта; СБИ — система бортовых измерений; БРТС — бортовая радиотехническая система; КПИ — командно-программная информация; ТМИ — телеметрическая информация (рисунок создан авторами)
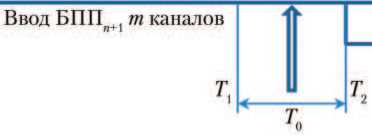
Основную массу КПИ, используемой для реализации полётных операций, составляют МЦИ прямого и отложенного исполнения. Последние представляют собой МЦИ, содержащие сложно структурированные, параллельно исполняемые БПП. Разработку таких программ осуществляют специалисты дежурной смены ГОГУ в масштабе реального времени (рис. 6).
Как видно на рис. 6, для каждого сеанса связи, на котором запланирован ввод БПП на сутки n + 1, есть номинальное время T 0 и время левой и правой границ (самое раннее время и самое позднее) ввода БПП в БВС T 1 и T 2 . Их значения определяются следующим образом:
T0 = TКПИ + ΔTКПИ + ΔTмод + ΔTрез, где TКПИ — время начала формирования КПИ; ΔTКПИ — продолжительность формирования КПИ; ΔTмод — продолжительность моделирования; ΔTрез — резервное время.
Значения T 1 и T 2 определяются следующим образом: T 2 — время исполнения первой директивы (команды) программы БПП n +1 ; T 1 определяется из следующих соотношений:
M ( t ) ≥ n – N ( t );
T1 = t, где M(t) — количество свободных каналов БППn+1 (функция времени); N(t) — количество свободных каналов БППn (функция времени); n — полный объём буфера БПП в памяти БЦВС; t — время.
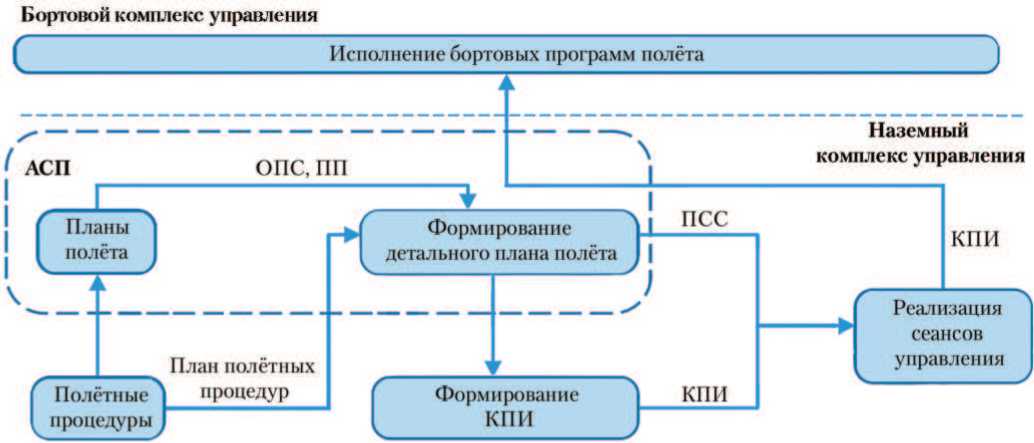
Рис. 5. Обобщённая схема реализации полётных операций: АСП — автоматизированная система планирования полёта; ОПС — общий план сопровождения; ПП — план полёта; ПСС — программа сеансов связи; КПИ — командно-программная информация (рисунок создан авторами)

БППя ^0 каналов
БППяЧ M(t) каналов
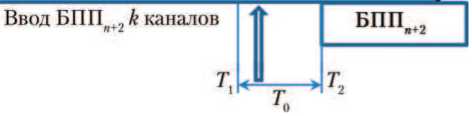
Рис. 6. Временные ограничения на разработку и ввод бортовых программ полёта (БПП) в бортовые вычислительные системы: Т 0 — номинальное время; Т 1 и Т 2 — время левой и правой границ ввода бортовых программ полёта в бортовую вычислительную систему соответственно; N(t) и M(t) — функции количества свободных каналов от времени для суток N и N+1 соответственно (рисунок создан авторами)
Из приведённых выше соотношений следует, что если значение T 0 находится в зоне радиовидимости средств НКУ, где выполняется следующее условие для T 0 :
T1 ≤ T0 < T2, то процесс формирования КПИ не нарушается. В противном случае происходит снижение качества процесса управления, что приводит к невыполнению программы полёта суток n+1.
Моделирование исполнения массивов КПИ включено непосредственно в технологию формирования КПИ и предназначено для решения двух групп задач [2]. К первой группе задач , решаемых непосредственно на этапе разработки КПИ, относятся:
-
• оптимизация использования ресурсов памяти БВС в части обеспечения полного и корректного заполнения зон, выделенных для хранения БПП;
-
• исключение возможности ошибочной записи новых БПП поверх неисполненных или хранящихся в памяти постоянно для повторного использования;
-
• формирование рекомендаций по планированию ввода КПИ с БПП T 0 в память БВС в виде допустимых интервалов времени T 1 и T 2 основного и резервных сеансов связи с РС МКС.
Вторая группа задач моделирования , решаемая по окончании разработки КПИ, но до наступления времени T 1 , обеспечивает:
-
• проверку семантической корректности формирования КПИ;
-
• проверку соответствия КПИ описанию запланированной полётной операции.
Разработка сложных бортовых программ в условиях реального времени возможна только с использованием описания полётных операций на предметно-ориентированных формальных языках высокого уровня. Запрос на создание и применение таких языков описания исходных текстов КПИ обусловлен необходимостью создания сложных разветвлённых БПП орбитальной станции в непрерывном технологическом процессе с установленными ограничениями на время выполнения всех стадий данного процесса.
Реализация полётных операций начинается с разработки ДПП российского сегмента МКС, содержащего все циклограммы смены режимов полёта и функций отдельных бортовых систем. Помимо режимов систем в ДПП вносится вся КПИ, необходимая для реализации каждой ПО. Большой объём КПИ, требуемой для управления полётом КА, приводит к существенной перегруженности ДПП и усложнению его интерпретации в процессе реализации полётных операций. Одним из методов решения этих проблем стало создание и использование в детальном планировании полётных операций формализованных полётных процедур (ФППр) с использованием переменных исходных данных из состава таблиц описания переменных программного обеспечения БКУ. Разработка ФППр выполняется на специализированном проблемно-ориентированном алгоритмическом языке «Формальный язык описания процедур» (ФОПР).
Разработка ФППр на языке ФОПР обеспечивает автоматизированное формирование эксплуатационной документации, формализованных оперативных исходных данных для последующего формирования массивов цифровой управляющей информации, содержащих описание полётных операций для их реализации средствами программноматематического обеспечения БКУ.
Разработан следующий алгоритм реализации полётных операций по КРЛ:
-
1) разработка оперативной документации по управлению полётом в виде ФППр;
-
2) разработка ДПП с использованием ФППр;
-
3) формирование массивов КПИ, ПСС в соответствии с ДПП и ФППр;
-
4) моделирование полётных операций на имитационных моделях;
-
5) ввод МЦИ в БКУ во время запланированных сеансов управления;
-
6) контроль реализации ПО по телеметрической информации (ТМИ) в реальном масштабе времени.
Разработанные методы реализации ПО были успешно применены в процессе управления полётом ОК РС МКС, обеспечили значительное снижение количества ошибок персонала управления полётом. Под ошибкой в КПИ понимается неправильность, погрешность, неумышленное искажение информации, которые являются причиной ущерба, риска при исполнении КПИ в процессе реализации полётной операции. Указанные ошибки проявляются в виде массивов КПИ, содержащих некорректные данные. Если считать показателем качества (точности) управления соотношение количества ошибок (объёма ошибочной КПИ, введённой в БКУ) Nош к общему объёму КПИ N , ош общ
N
K = 1 –
ош
N общ
то в период полёта МКС в 2000–2022 гг. его значение составило от 0,92 (2000 г.) до 0,99 (2003–2023 гг.). Расчёт значений K выполнялся ежегодно на интервале 12 мес. (в 2000 г. — на интервале 6 мес.). Таким образом, можно утверждать, что произошло существенное повышение качества командно-программного управления полётом РС МКС. Это повышение выражено в сокращении количества ошибок персонала управления, вызывающих сбои в работе БКУ, в условиях многократного роста объёма формируемой КПИ, без увеличения численности персонала [6].
Контроль полёта
Процесс контроля полёта обеспечивает представление информации в контуре обратной связи для решения задач управления и достижения целей полёта КА. За счёт этого процесса вырабатывается заключение о результатах деятельности по управлению КА, необходимости организации дополнительной деятельности. Без наличия обратной связи между элементами системы управления полётом невозможна организация эффективного управления в целом (рис. 7).
Функция контроля выполняется для оценки безопасности экипажа, состояния, работоспособности и ресурсов КА, характера его движения, состояния экипажа, внешней обстановки, выполнения ПО, научно-исследовательской программы и плана полёта в целом и организации своевременного вмешательства в процесс управления. Приоритетными причинами для организации такого вмешательства являются:
-
• угроза безопасности экипажа;
-
• угроза безопасности (живучести) станции;
-
• угроза срыва запланированной программы полёта.
По результатам контроля принимается решение по дальнейшему управлению полётом. Этим решением определяется, продолжать ли полёт по прежнему плану (если фактические значения контролируемых параметров находятся в пределах нормы) или же (если эти значения выходят за пределы допустимых значений) предпринять действия по парированию складывающейся при этом нежелательной ситуации, скорректировать первоначальный ПП и в дальнейшем следовать скорректированному плану. В последнем случае необходимыми компонентами решения являются выбор стратегии управления, выбор варианта первоочередных действий по управлению и корректировка (а при необходимости — и разработка заново) плана полёта.
При формировании решения по управлению полётом во внимание принимаются не только результаты контроля параметров фактического состояния пилотируемого космического аппарата, но также фактическое и прогнозируемое состояние наземных средств, обеспечивающих управление полётом (текущую степень готовности к работе станций слежения, системы связи и передачи данных и т. п.).
Контроль полётных данных служит основой для принятия решений на продолжение штатной программы полёта или, при выявлении отклонений в состоянии контролируемых параметров, переводу КА в режим полёта с ограниченной функциональностью. Контроль полёта КА условно можно разделить на две составные части: оперативный контроль состояния бортовых систем (БС) КА и анализ полётных данных КА.
Основными задачами оперативного контроля являются проверка соответствия фактического состояния совокупности параметров контроля заданному режиму работы БС и оценка корректности работы БС в данном режиме.
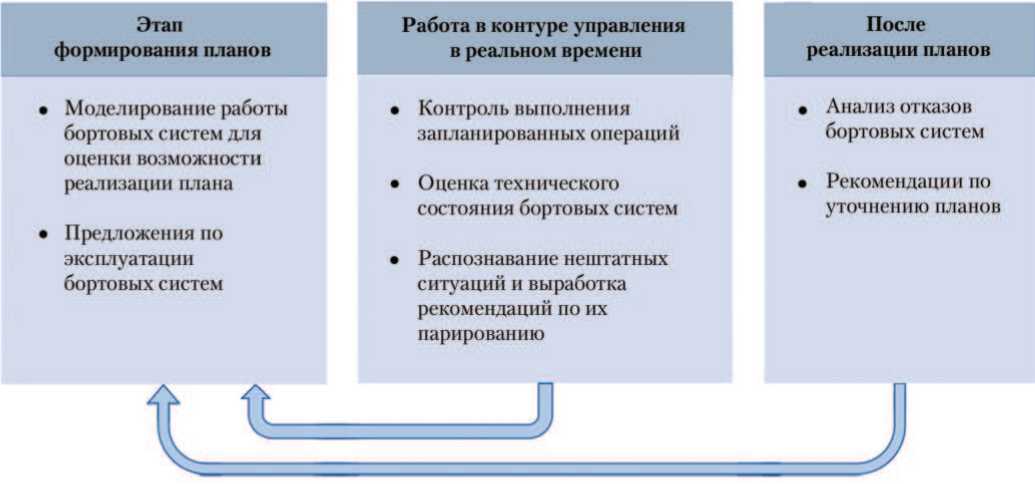
Рис. 7. Деятельность специалиста по контролю работы бортовых систем в контуре управления полётом Российского сегмента МКС (рисунок создан авторами)
Основными задачами анализа полётных данных являются детальное изучение фактов и выявление взаимосвязи контролируемых параметров, а также их изменения во времени для выявления отказов, аномалий и тенденций к их возникновению в работе БС и КА в целом.
Оперативный контроль, как правило, выполняется в реальном времени, а анализ полётных данных может быть выполнен несколько позже реального времени. Первоначальный контроль ТМИ БС реализуется средствами БКУ, где осуществляется автоматическая оценка состояния БС и инициируются управляющие воздействия для парирования выявленных отказов с формированием аварийных сообщений для специалистов ГОГУ и экипажа МКС [7].
Для проведения процедуры контроля по ходу проведения лётных испытаний необходимо создать и постоянно поддерживать специальные «инструменты». К таким «инструментам» относятся комплекты эксплуатационной технической документации, включающие в себя организационные инструкции персонала управления, процедуры и методики управления, инструкции по оценке работы бортовых систем, инструкции по действиям при НШС. В соответствии с нормативной документацией такой комплект документов содержит:
-
• общие указания по оценке состояния БС;
-
• краткое описание устройства БС и режимов её работы;
-
• описание телеметрических параметров (наименования, диапазоны измерений датчиков, возможные состояния, а также их местонахождение в системе бортовых измерений);
-
• указания по порядку контроля состояния БС и используемому для этих целей методу;
-
• таблицы состояний параметров контроля БС в каждом из режимов работы с указанием номинальных значений или допустимых диапазонов значений;
-
• справочные материалы (структурные схемы с указанием мест установки телеметрических датчиков, перечень команд и управляющих воздействий на систему, форматы отображения ТМИ на средствах ЦУП и др.).
Обязательной частью инструкций по оценке состояния БС являются расчётные НШС, представленные в виде таблиц с соответствующими состояниями телеметрических параметров, а также вариантами действий по восстановлению функциональности БС. Параллельно с технической эксплуатационной документацией разрабатывается документация по организации оценки состояния БС.
Контроль состояния бортовых систем требует наличия специального математического обеспечения (СМО), которое обеспечивает в режиме реального времени предоставление оператору данных по текущим значениям параметров его системы. На этапе подготовки объекта к запуску такое программное обеспечение создаётся в ЦУП по техническим заданиям операторов контроля и, по мере модернизаций версий бортового программного обеспечения модулей РС МКС, оно также корректируется. За период лётных испытаний РС МКС было проведено более 50 модернизаций СМО ЦУП в целях обеспечения контроля работы систем различных модулей и кораблей сегмента.
Головную роль в проведении контроля полёта выполняет персонал ГОГУ, который располагается на рабочих местах центра управления полётом и проводит контроль полёта с использованием данных программно-технических комплексов ЦУП, сообщений экипажа и эксплуатационной документации. В состав данных, используемых при выполнении процедур контроля, входят:
-
• результаты автоматизированной обработки «аналоговой» ТМИ (первичной ТМИ с датчиков, встроенных в бортовые системы; с датчиков медицинской аппаратуры, находящихся на теле космонавтов; приборов, измеряющих параметры внешней среды);
-
• результаты автоматизированной обработки «цифровой» ТМИ (ТМИ, формируемой в БВС КА и включающей в себя как первичную информацию от датчиков КА, так и вторичные данные по результатам работы алгоритмов БКУ);
-
• сообщения экипажа РС МКС о результатах выполняемого им контроля полёта, о выполнении текущих работ и программы научных исследований в соответствии с ПП;
-
• телевизионная информация с внутренних и внешних телекамер КА.
Для решения задач анализа ТМИ на вычислительных средствах ЦУП в реальном масштабе времени автоматизированно обрабатывается ТМИ, при которой формируются физические величины ТМП, привязанные к шкале времени. Полученные данные являются основой для проведения анализа, и в конечном итоге — определения состояния КА. Результаты обработки ТМИ представляются специалистам службы управления на форматах отображения ТМИ и подвергаются анализу непосредственно специалистами управления. На основе анализа выполнения требований эксплуатационной документации и текущей программы полёта делается заключение о техническом состоянии КА и выполнении запланированной программы полёта. Поскольку анализируется значительный объём разнородной информации, большое значение имеют квалификация и опыт специалиста управления.
В течение длительного времени основным способом предоставления результатов автоматизированной обработки ТМИ для специалистов ГОГУ являлись алфавитно-цифровые форматы отображения ТМИ. Данный способ в целом является достаточно эффективным и интуитивно понятным. Достоинствами алфавитно-цифровых кадров являются следующие: возможность разместить большой объём информации на одном кадре, цветовая окраска помогает быстрой оперативной оценке состояния бортовых систем и появления отказов, большая информативность позволяет выполнять детальный анализ функционирования бортовых систем с помощью специализированных кадров.
Наиболее эффективно такой вид предоставления данных работает в том случае, если эти данные формируются по иерархическому принципу (рис. 8). Использование алфавитно-цифровых кадров, представленных в иерархической структуре, позволяет предоставить всю информацию о состоянии объекта управления в удобном для восприятия и анализа виде.
Основные преимущества иерархической структуры кадров: наглядность информации по системам и модулям, возможность при необходимости получить для каждого модуля полную диагностическую информацию по конкретной системе или по её элементу.
В настоящее время совместно с алфавитно-цифровыми форматами отображения широко используется предоставление информации персоналу ГОГУ в виде мнемосхем. Наглядно отображая структуру БС КА, мнемосхема облегчает специалисту запоминание схем объектов, взаимосвязь между параметрами, назначение приборов и органов управления. На мнемосхеме можно также реализовать, правда, в ограниченном объёме, обозначение цветом состояний телеметрических параметров по результатам автоматизированного допускового контроля. В процессе управления мнемосхема является для специалиста важнейшим источником информации о текущем состоянии БС, характере и структуре протекающих в ней процессов, в т. ч. связанных с нарушением технологических режимов, отклонений и авариями. Это позволяет оператору комплексно отслеживать процессы, протекающие в КА, и быстрее давать оценку его состоянию, что крайне важно в условиях ограниченной продолжительности сеансов связи, особенно при возникновении НШС.
Недостатком представления результатов обработки в алфавитно-цифровом виде является невозможность отслеживания тенденций в поведении быстроменяющихся параметров в режиме «реального времени».
Наиболее наглядным способом представления результатов обработки для таких задач является графический способ представления данных. Помимо наглядности в части определения отличия текущего значения параметра от его максимального и минимального допустимых уровней, график позволяет легко уловить динамику изменения параметра или его цикличность. Последнее особенно важно при оценке параметров динамических режимов, так как качественно и количественно позволяет отслеживать способность системы к гашению колебаний и затуханию переходных процессов.
При графическом способе представления информации возможно применение таких его особенностей, как:
-
• различные масштабы шкалы времени;
-
• возможность одновременного отображения нескольких взаимозависимых или взаимодействующих параметров;
-
• возможность одновременного отображения контролируемого параметра на равных по величине периодах с различной привязкой их к общей шкале времени.
При графическом способе представления информации телеметрический параметр может также подвергаться различной алгоритмической обработке с отображением результатов этой обработки на графиках. Но, в отличие от алфавитно-цифрового способа представления информации, графический способ требует много места на экране монитора. Поэтому для оперативного анализа он должен применяться выборочно.
Таким образом, в системе управления полётом в настоящее время используется комбинированная схема предоставления данных автоматизированной обработки ТМИ, включающая в себя алфавитно-цифровой вид
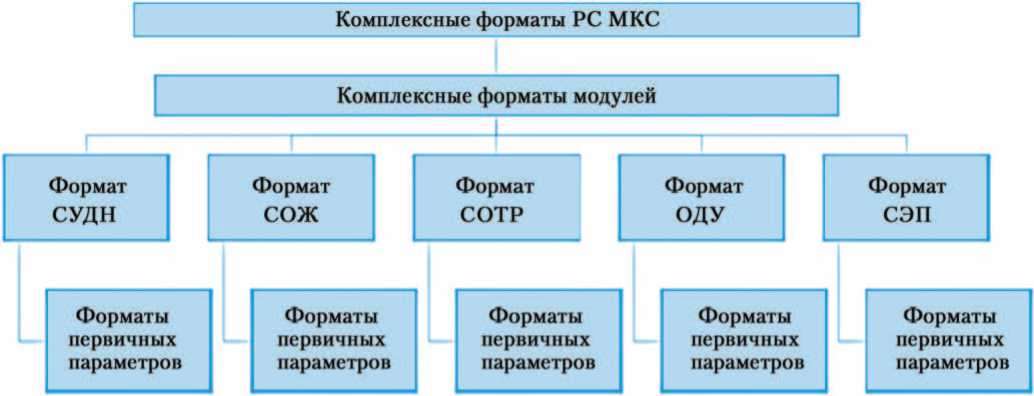
Рис. 8. Иерархическая структура форматов отображения телеметрической информации российского сегмента МКС: СУДН — система управления движением и навигации; СОЖ — система обеспечения жизнедеятельности; СОТР — система обеспечения терморегулирования; ОДУ — объединённая двигательная установка; СЭП — система электропитания (рисунок создан авторами)
с использованием иерархической структуры, а также мнемосхемы для контроля работы различных систем модулей и графический вид для контроля отдельных быстроменяющися параметров. Такой подход используется для проведения контроля в системе управления полётом, начиная с проведения работ с орбитальной станцией «Мир», и подтвердил свою высокую надёжность и эффективность.
Однако по мере наращивания РС МКС количество контролируемых телеметрических параметров бортовых систем РС МКС неуклонно растёт. Для решения задач контроля состояния БС РС МКС в условиях увеличения количества контролируемых телеметрических параметров в настоящее время создаются средства дополнительной информационной поддержки специалистов ГОГУ, в основу которых заложен принцип использования интерактивного режима взаимодействия специалиста с программными средствами обработки ТМИ. Такой подход в полной мере решает задачу автоматизированного распознавания НШС на КА. При этом специалист ГОГУ в режиме реального времени настраивает контролирующие эталоны под текущее состояние БС. Наличие подобных средств информационной поддержки позволяет освободить специалистов от операций контроля наиболее трудоёмких «рутинных» составляющих и, в конечном итоге, минимизировать состав специалистов ГОГУ, обеспечивающих оценку технического состояния БС РС МКС. Эти средства работают совместно со штатными средствами контроля работы объекта и позволяют существенно повысить надёжность процедуры контроля.
Анализ полётных данных, который выполняется после проведения сеансов управления в так называемом «отложенном времени», представляет собой самостоятельный процесс. Основной целью такого процесса является детальное изучение фактов и выявление взаимосвязи контролируемых параметров, а также их изменения во времени для выявления отказов, аномалий и тенденций к их возникновению в работе БС и КА в целом. Такой подход позволяет обеспечить возможность прогнозирования функционирования объекта управления.
Заключение
Методы и технология управления полётом РС МКС обеспечили его многолетний полёт с гарантированным выполнением программы полёта в условиях значительного увеличения количества планируемых и выполняемых полётных операций, объёма формируемой КПИ и поступающей с борта ТМИ в реальном масштабе времени. Технические и программные средства управления полётом РС МКС, которые были созданы к запуску первых элементов МКС и модернизированы по результатам применения, обладают необходимой масштабируемостью. Эта масштабируемость обеспечивает успешное решение задач планирования полёта, реализации полётных операций, контроля полёта независимо от этапа развёртывания или целевого использования РС МКС, количества членов экипажа, в т. ч. при парировании НШС. Опыт, полученный при работах по РС МКС, стал базой для создания технологии управления полётом проектируемой Российской орбитальной станции.
Список литературы Управление полётом Российского сегмента Международной космической станции
- Соловьёв В.А. Система управления полётами пилотируемых космических комплексов // Материалы общих пленарных заседаний 13-й мультиконференции по проблемам управления. СПб.: АО "Концерн "ЦНИИ "Электроприбор", 2020. 65 с.
- Соловьёв В.А., Лысенко Л.Н., Любинский В.E. Управление космическими полётами. В 2 т. /Под общ. ред. Л.Н. Лысенко. М.: Изд-во МГТУ им. Н.Э. Баумана, 2009. 912 с.
- Станиловская В.И. Автоматизация планирования полётов долговременных орбитальных комплексов: диссертация на соискание учёной степени кандидата технических наук: 05.07.09. Место защиты - Московский государственный технический университет им. Н.Э. Баумана. Королёв, 2008. EDN: NPQCHV
- Беляев А.М. Основные принципы построения автоматизированной системы планирования полёта Российского сегмента Международной космической станции // Космическая техника и технологии. 2016. № 3(14). С. 91-99. EDN: XAMFYP
- Станиловская В.И., Беляев А.М., Потоцкий С.И., Козлечков А.Г., Колокольцева О.М., Будникова Т.С. Автоматизированная система планирования полёта Российского сегмента Международной космической станции // Программные продукты и системы. 2013. № 3. 9 с. EDN: SIMOJN
- Брега А.Н., Коваленко А.А. Командно-программное управление полётом Российского сегмента МКС // Космическая техника и технологии. 2016. № 2(13). С. 90-104. EDN: WCKDFH
- Коваленко А.А., Пирогов П.В., Скурский Ю.А., Соловьёв С.В., Станиловская В.И. Перспективы развития технологий управления полётом Международной космической станции // Космонавтика и ракетостроение. 2018. № 5(104). С. 36-47. Статья поступила в редакцию 11.12.2023 г. Окончательный вариант - 22.12.2023 г. EDN: VKXVDP
