Управление потоком мощности в многотерминальных электротехнических комплексах с учетом влияния сопротивления линии постоянного тока

Автор: Ибрагим Майсам, Пантелеев В. И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 4 т.16, 2023 года.
Бесплатный доступ
Потери из-за снижения напряжения в линии постоянного тока оказывают значительное влияние на точное управление потоком мощности в многотерминальных системах ПИН-ВППТ с использованием управления напряжением на шинах постоянного тока. Когда управление напряжением на шинах постоянного тока используется в многотерминальных системах ПИН- ВППТ, из-за неравных напряжений на шинах постоянного тока снижения напряжения в линии постоянного тока возникают большие отклонения потока мощности. Потери мощности в линии постоянного тока и в преобразователях также вызывают отклонения потока мощности в сети постоянного тока от желаемого значения. Для точного управления потоком мощности в сети постоянного тока необходимо устранить отклонения мощности, возникающие из-за каждого из этих факторов. При моделировании пятитерминальной системы ПИН-ВППТ в Matlab/ Simulink показано, как добиться точного управления потоком мощности в системе с учетом снижения напряжения постоянного тока и потерь мощности в линии постоянного тока (учет потерь мощности преобразователя выходит за рамки данной статьи).
Многотерминальный пин-вппт, снижение напряжения, потери мощности, управление потоком мощности, опорное напряжение, опорная мощность
Короткий адрес: https://sciup.org/146282637
IDR: 146282637 | УДК: 621.3.051.024
Power flow control in multi-terminal electrical complexes, taking into account the effect of dc line resistance
Losses due to voltage drop in the DC line have a significant impact on the accurate control of power flow in multi-terminal VSC-HVDCs using DC voltage droop control. When DC voltage droop controls are used in multi-terminal VSC-HVDC, due to unequal DC bus voltages, voltage drops in the DC link cause large power flow variations in the DC grid. Power losses in the DC link and converter power losses also cause deviations in the power flow in the DC network. To accurately control the power flow in a DC network, it is necessary to eliminate the power deviations that occur due to each of these factors. Modeling a five-terminal VSC-HVDC system in Matlab/Simulink shows how to achieve precise power flow control in a multi-terminal VSC-HVDC, taking into account the reduction of DC voltage and power losses in the DC line (accounting for converter power losses is beyond the scope of this article).
Текст научной статьи Управление потоком мощности в многотерминальных электротехнических комплексах с учетом влияния сопротивления линии постоянного тока
Цитирование: Ибрагим М. Управление потоком мощности в многотерминальных электротехнических комплексах с учетом влияния сопротивления линии постоянного тока / М. Ибрагим, В. И. Пантелеев // Журн. Сиб. федер. ун- та. Техника и технологии, 2023, 16(4). С. 412–425. EDN: LUYDAG нию многотерминальным ПИН-ВППТ рассматривали распространение стратегии управления, используемой для двухтерминальных систем ВППТ, а именно: один терминал ПИН-ВППТ управляет напряжением постоянного тока, тогда как каждый из других терминалов ПИН-ВППТ реализует стабилизацию мощности в функции нагрузки через изменение сигнала опорной мощности. Этот подход к управлению для многотерминального ПИН-ВППТ был предложен в [4], [5], [6].
Другой подход к многотерминальному управлению ПИН-ВППТ, который в последнее время привлек значительное внимание, заключается в использовании управления уровнем напряжения постоянного тока (стабилизации) на всех терминалах ПИН-ВППТ [7]. При использовании такого управления два или более терминалов ПИН-ВППТ могут участвовать в управлении напряжением постоянного тока, тем самым разделяя обязанности по балансировке мощности в сети постоянного тока [8]. Управление уровнем напряжения постоянного тока может обеспечить требуемую надежность системы, в то же время сохранив относительно простую структуру управления [9]. Первое предложение по использованию управления по отклонению напряжения постоянного тока в многотерминальном ВППТ на основе классического преобразователя можно найти в [10]. Самая ранняя из доступных в литературе работ, в которой предлагалось использовать отклонение напряжения постоянного тока для многотерминальных ПИН-ВППТ, в [7]. С тех пор в литературе [8] и [11] были предложены различные варианты стабилизации напряжения постоянного тока.
Несмотря на то что было проведено много работ по системам стабилизации напряжения на шинах постоянного тока, остаётся неизученной возможность применения управления напряжением на шинах постоянного тока для получения желаемых потоков мощности без каких-либо отклонений от заданных опорных значений мощности.
Целью данной статьи является исследование возможности точного управления потоком мощности в многотерминальной системе ПИН-ВППТ с учётом влияния сопротивления линии постоянного тока при настройке опорных значений напряжения постоянного тока и мощности преобразователей.
Точное управление мощностью
Точное управление мощностью – это задача получения постоянного профиля потока мощности на уровне, заданном опорным значением, которое, в свою очередь, определяется таблицей потока мощности.
Задача оператора сети МППТ состоит в том, чтобы определить правильные опорные значения для преобразователей, чтобы постоянный поток мощности во всей сети МППТ стал равным указанному в таблице потока мощности.
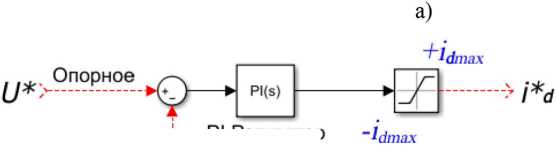
Чтобы понять проблему точного управления потоком мощности в сети МППТ, рассмотрим характеристики зависимости напряжения постоянного тока от мощности ( U-P ) для трех типов регуляторов внешнего контура управления (рис. 1).
На рис. 1а видно, что вводимая мощность в сеть МППТ терминалом ПИН-ВППТ, который работает в режиме управления постоянной мощностью, всегда равна опорной P * . Это соответствует выражению установившегося сигнала ошибки [13]:
р-— р = е = 0. (1)
Аналогично на рис. 1б видно терминал ПИН-ВППТ, который работает в режиме управления напряжением на шине постоянного тока и определяется значением опорного U * . Это соответствует выражению установившегося сигнала ошибки [14]:
U - U = е = 0. (2)
Терминал ПИН-ВППТ, который работает в режиме управления постоянным напряжением постоянного тока, при его наличии в сети МППТ обеспечивает баланс полезной мощности (дефицит/избыток). Этот терминал называется главным [15].
Стоит отметить, что для корректной работы при номинальном напряжении сети МППТ необходимо наличие в сети преобразователя терминала, работающего в режиме управле-

Измеренное
Ивертор режим
PI Регулятор
Ограничитель
Выпрямитель режим
о р*
>Р
PI Регулятор
Ограничитель
Измеренное
U
и*
Измеренное!
и* >
Ивертор режим
Выпрямитель режим
р* .. Опорное
PI Регулятор
Ограничитель
U
в)
Ивертор режим
Выпрямитель режим
7^^
Рис. 1. Характеристики (U-P) различных конфигураций управления: а) управление постоянной мощностью; б) управление постоянным напряжением постоянного тока; в) управление стабилизации напряжения постоянного тока
Fig. 1. Characteristics (U-P) of various control configurations: a) constant power control; б) DC voltage control; в) DC voltage droop control ния постоянным напряжением постоянного тока. А чтобы добиться стабильной работы сети МППТ, в ней не должно быть более одного преобразователя терминала, работающего в системе управления постоянным напряжением постоянного тока [16].
Из вышеизложенного отметим, что точное управление потоком мощности не может быть проблемой в сети постоянного тока МППТ, если в эту сеть входит терминал, работающий в системе управления постоянным напряжением постоянного тока (главный терминал), и остальные терминалы в сети, работающие в системе управления постоянной мощностью (вторичные клеммы), потому что поток мощности на вторичных терминалах будет определяться в соответствии с их опорными значениями.
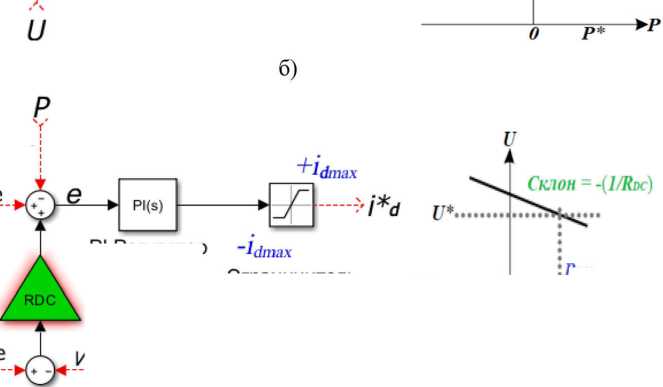
На рис. 1в видно, что вводимая мощность в сеть МППТ терминалом ПИН-ВППТ, который работает в режиме стабилизации напряжения постоянного тока, равна опорной P* только при разности напряжений на шине постоянного тока, равной нулю. Это следует из уравнения установившегося сигнала ошибки [17]:
(Р* - Р) + Rdc (U*-U) = e = 0.
Между шинами постоянного тока всегда существует разница напряжений из-за ненулевого сопротивления линии, и всякий раз, когда поток мощности отличен от нуля в сети постоянного тока МППТ, будет иметь место разница в напряжении шины постоянного тока на разных терминалах. Хотя разность напряжений на шинах постоянного тока невелика по сравнению с номинальным напряжением сети постоянного тока МППТ, ее влияние на управление потоком мощности велико из-за высокого коэффициента усиления RDC регулятора напряжения постоянного тока [18].
Если сеть МППТ состоит из терминалов ПИН-ВППТ, работающих только в режиме стабилизации мощности и в режиме стабилизации напряжения постоянного тока (главного терминала нет), то возникнет проблема с получением требуемого потока мощности на терминалах, работающих в режиме стабилизации напряжения постоянного тока [19]. Это легко доказать с помощью уравнения (3): если сигнал ошибки напряжения постоянного тока равен ( U - U ) = 0, то можно получить точный поток мощности, но это условие должно быть выполнено для каждого терминала, работающего в режиме стабилизации напряжения постоянного тока. Если один из терминалов не выполняет это условие, другие терминалы также будут иметь отклонение в потоке мощности в установившемся режиме. Одной из возможных причин такого отклонения в потоке мощности является невозможность учета снижения напряжения в сети постоянного тока при выборе опорных значений напряжения постоянного тока. Это явление освещается в данной статье. Управление снижением напряжения постоянного тока (стабилизация) необходимо для безопасной работы МППТ.
-
1. Определение опорной мощности и опорного напряжения постоянного тока
Многотерминальная система передачи электроэнергии постоянного тока МППТ подвержена отклонению потока мощности в установившемся режиме на всех терминалах ПИН-ВППТ, работающих в режиме стабилизации напряжения постоянного тока [20], [21], [22].
Возможными источниками отклонения мощности от требуемых уровней являются:
-
1. Неучитываемые стохастические снижения напряжения в сети постоянного тока;
-
2. Неучитываемые стохастические потери мощности в сети постоянного тока;
-
3. Неучитываемые стохастические потери мощности преобразователя.
-
2. Моделирование и симуляция системы МППТ
Первое условие означает, что напряжения шины постоянного тока на разных терминалах из-за снижения напряжения в линии постоянного тока имеют небольшие различия, которые, однако, достаточно велики, чтобы повлиять на контроллер снижения напряжения постоянного тока. Единственный возможный случай, когда все напряжения на шине постоянного тока становятся одинаковыми, это отсутствие потока мощности в сети постоянного тока. Если присвоить опорным напряжениям постоянного тока для всех терминалов ПИН-ВППТ одно и то же значение (например, номинальное напряжение постоянного тока), то это, безусловно, приведет к устойчивому отклонению мощности преобразователя.
Второе условие означает, что сумма потока мощности в сети постоянного тока не равна нулю из-за потерь в линиях постоянного тока. Если опорные мощности определяются путем предположения о нулевом потоке полезной мощности в сеть постоянного тока (что верно только для системы без потерь), в потоках мощности терминалов ПИН-ВППТ возникнет установившаяся ошибка.
Третье условие возникает из-за того, что величины измерения мощности переменного и постоянного тока ( P AC и P DC ) отличаются на величину, равную потерям мощности преобразователя.
Чтобы устранить отклонения мощности из-за снижения напряжения в линии постоянного тока и потерь мощности в линии постоянного тока, необходимо провести анализ потока нагрузки постоянного тока для желаемого графика потока нагрузки в сети постоянного тока и использовать результаты анализа потока нагрузки в качестве опорного напряжения постоянного тока и мощности для терминалов ПИН-ВППТ [23]. Анализ потока нагрузки сети постоянного тока в этой статье выполнен в программе RastrWin3.
Для устранения отклонений потока мощности из-за потерь в преобразователе следует либо измерять мощность со стороны постоянного тока, либо учитывать потери преобразователя при назначении опорной мощности преобразователя [24]. На практике мощность измеряется со стороны переменного тока [25].
Схема с пятью терминалами ПИН-ВППТ, показанная на рис. 2, была смоделирована в программной среде Matlab/Simulink.
Значения символов, используемых на рис. 2:
-
UN – номинальное напряжение сети постоянного тока, кВ;
P N – номинальная мощность терминала i, МВт;
ρDC – коэффициент снижения напряжения постоянного тока терминала i;
l ij – протяжённость передачи постоянного тока между терминалами i и j, км.
В имитационной модели ПИН-ВППТ с пятью терминалами два терминала ПИН-ВППТ (терминал-2 и терминал-5) работают в режиме стабилизации мощности, тогда как другие три используются для стабилизации напряжения постоянного тока. Были проведены имитационные испытания с целью:
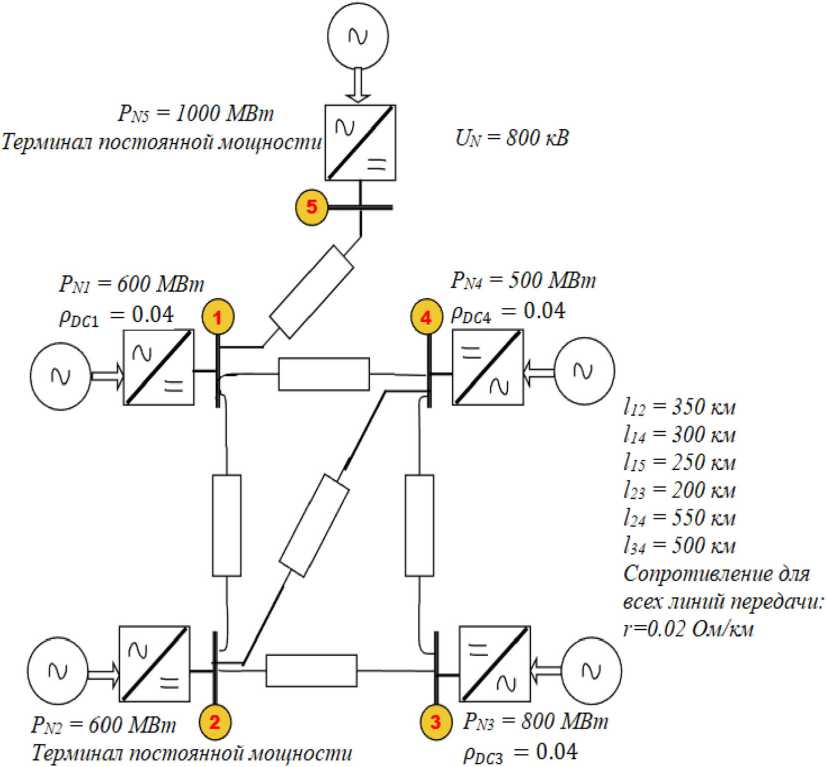
Рис. 2. Схема МППТ, используемая при изучении моделирования и симуляции
Fig. 2. МTDC circuit used in the study of modeling and simulation
– изучить влияние потерь мощности в линии постоянного тока и снижения напряжения в линии постоянного тока на потоки мощности преобразователя;
– продемонстрировать использование анализа потока нагрузки постоянного тока для точной установки опорных значений мощности и напряжения постоянного тока для устранения нежелательных отклонений потока мощности.
Первый вариант моделирования (пренебрежение сопротивлением линии передачи -идеальная сеть):
ПИН-ВППТ терминалы 1, 2, 4 и 5 желательно использовать при уровнях мощности шины постоянного тока 400 МВт, –400 МВт, 300 МВт и –800 МВт. Игнорируя потери при передаче, оставшийся терминал ПИН-ВППТ (терминал 3) должен поставлять баланс, который составляет 500 МВт. Номинальное напряжение шины постоянного тока для всех преобразователей составляет 800 кВ. В этом варианте моделирования использовался набор опорных значений, показанных в табл. 1.
Результаты моделирования представлены в табл. 2 и на рис. 3.
Как и ожидалось, установившийся поток энергии очень близок к желаемым опорным значениям, приведенным в табл. 1.
Таблица 1. Опорные значения, используемые для моделирования
Table 1. Reference values used for simulation
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
Р*с (МВт) |
400 |
-400 |
500 |
300 |
-800 |
|
UDC (кВ) |
800 |
800 |
800 |
800 |
800 |
Таблица 2. Результаты моделирования для набора, опорные значения в табл. 1
Table 2. Simulation results for the set of references in table 1
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P dc (МВт) |
399.6 |
-400.7 |
501 |
300.3 |
-800.2 |
|
U dc (кВ) |
799.6 |
799.6 |
799.6 |
799.6 |
799.6 |
|
Р*с (МВт) |
400 |
-400 |
500 |
300 |
-800 |
|
P dc, еггог (МВт) |
-0.4 |
-0.7 |
1 |
0.3 |
-0.2 |
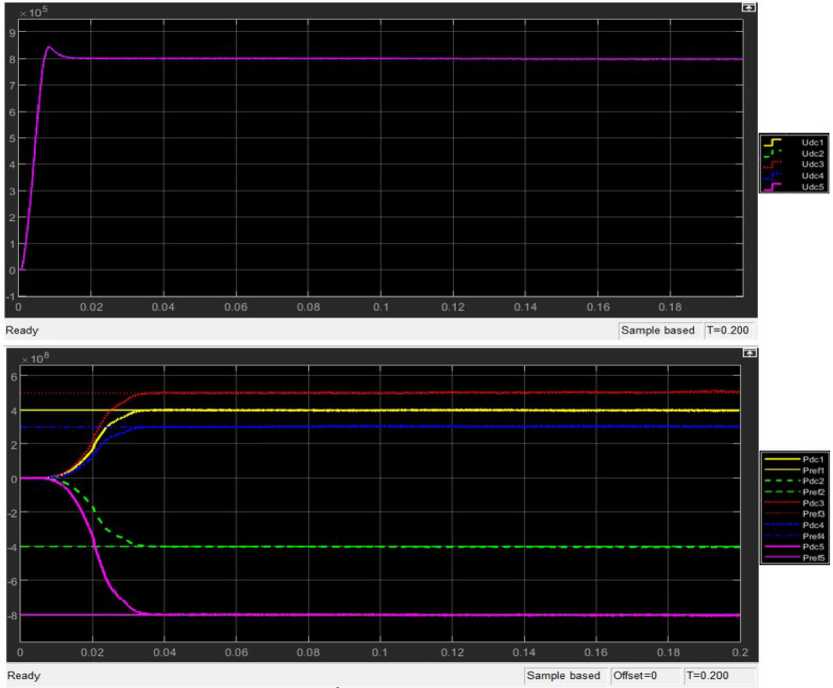
Рис. 3. Реакции управления потоком мощности в идеальной (без потерь) сети постоянного тока
-
Fig. 3. Power flow control responses in ideal (lossless) dc grid
– 419 –
Второй вариант моделирования (с учётом сопротивления линии передачи – реальная сеть):
Результаты моделирования с учетом сопротивления линии передачи и с использованием опорных значений из табл. 1 приведены в табл. 3 и на рис. 4.
Таблица 3. Результаты моделирования для набора опорных в табл. 1 и реальная сеть постоянного тока
Table 3. Simulation results for the set of references in table 1 and non-ideal dc grid
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P DC (МВт) |
461.3 |
-401.8 |
456.8 |
297.3 |
-799.3 |
|
U DC (кВ) |
794.5 |
796.2 |
800.2 |
798.5 |
784 |
|
Pdc (МВт) |
400 |
-400 |
500 |
300 |
-800 |
|
P DC, error (МВт) |
61.3 |
-1.8 |
43.2 |
-2.7 |
0.7 |
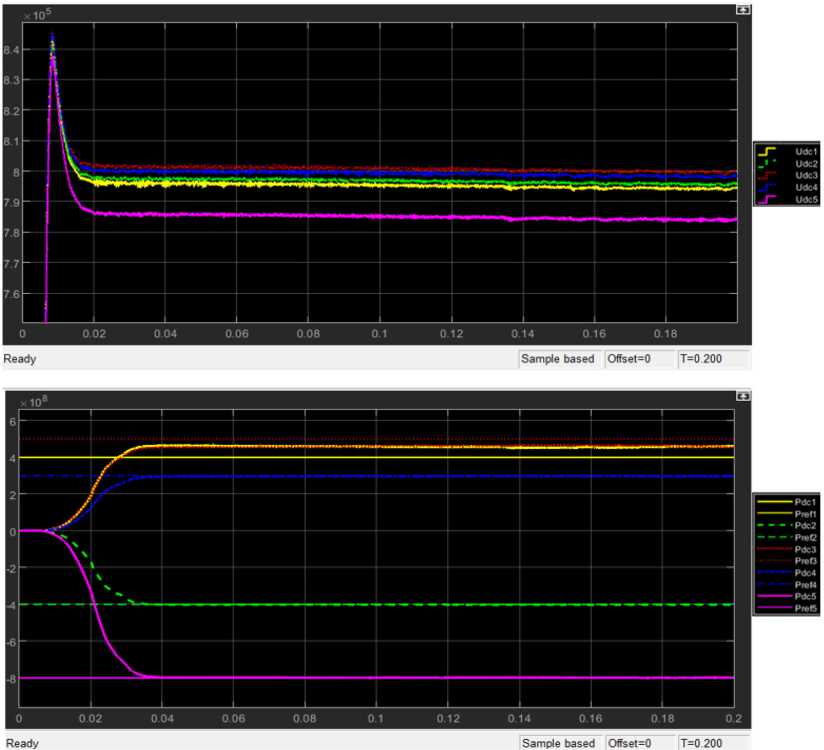
Рис. 4. Реакции управления потоком мощности в реальной сети постоянного тока
-
Fig. 4. Power flow control responses in non-ideal dc grid
Видно, что игнорирование потерь мощности в линии постоянного тока и снижения напряжения в линии постоянного тока при установке опорных значений привело к значительным отклонениям мощности в установившемся режиме на терминал 1 и терминал 3 от первоначально желаемых целевых значений.
Третий вариант моделирования (использование опорного напряжения постоянного тока и опорной мощности, определенных на основе анализа потока нагрузки постоянного тока).
Точное управление мощностью в сети постоянного тока требует использования анализа потока нагрузки постоянного тока для определения правильных опорных значений мощности и напряжения постоянного тока для контроллеров ПИН-ВППТ. Анализ потока нагрузки выполнен в RastrWin3. Из анализа потока нагрузки были найдены численные значения, представленные в табл. 4.
Численные значения из табл. 4 использовались в качестве опорных значений мощности и напряжения постоянного тока.
Чтобы увидеть влияние пренебрежения снижением напряжения постоянного тока и потерями мощности постоянного тока по отдельности, опорные значения для напряжения на шине постоянного тока и опорные значения для мощности на шине постоянного тока были скорректированы в два этапа. Сначала опорные значения напряжения постоянного тока, использованные в предыдущем случае моделирования, были заменены значениями напряжения постоянного тока из анализа потока нагрузки постоянного тока (из табл. 4). Результат моделирования показан в табл. 5.
На втором этапе использовались опорные значения мощности из табл. 4, но без корректив опорных значений напряжения. Мощности в установившемся режиме на шине постоянного тока, наблюдаемые при моделировании, показаны в табл. 6.
Таблица 4. Результаты анализа потока нагрузки постоянного тока в RastrWin3
Table 4. Results from the DC load flow analysis in RastrWin3
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P DC (МВт) |
400 |
-400 |
514.4 |
300 |
-800 |
|
U DC (кВ) |
793.58 |
795.65 |
800 |
798.01 |
783.37 |
Таблица 5. Результаты моделирования с опорными значениями, скорректированными только для разницы напряжений на шине постоянного тока
Table 5. Simulation results with references adjusted only for dc-bus voltage differences
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P DC (МВт) |
404.2 |
-402.9 |
511.4 |
303.4 |
-800.9 |
|
U DC (кВ) |
791.2 |
793.4 |
797.4 |
795.7 |
781.1 |
|
Рас (МВт) |
400 |
-400 |
514.4 |
300 |
-800 |
|
P DC, error (МВт) |
4.2 |
-2.9 |
-3 |
3.4 |
-0.9 |
Сравнивая ошибки потока мощности в табл. 3, 5 и 6, легко заметить, что ошибки значительно уменьшились, когда при моделировании использовались соответствующие опорные значения постоянного напряжения. Это подтверждает версию о том, что большая часть ошибок потока мощности, показанных в табл. 3, возникает из-за неправильной настройки опорного напряжения постоянного тока.
Наконец, моделируем сеть постоянного тока, учитывая на этот раз как разность напряжений на шине постоянного тока, так и общие потери мощности в линии постоянного тока. Это делается путем использования всех результатов анализа потока мощности постоянного тока в табл. 4 для назначения опорного напряжения постоянного тока и опорного мощности контроллеров ПИН-ВППТ. Результирующий профиль потока мощности показан на рис. 5 и в табл. 7.
Из табл. 7 видно, что мощность шины постоянного тока достаточно близка к изначально желаемым уровням, что свидетельствует о вкладе анализа потока нагрузки постоянного тока в точное управление потоком мощности сети постоянного тока.
Сравнивая табл. 5, 6 и 7, мы можем заметить, что примерно 93,5 % отклонений потока мощности на терминале 1 произошло из-за пренебрежения сниженными напряжениями на шине постоянного тока, тогда как остальные 6,5 % отклонений произошли из-за пренебрежения потерями мощности в линии постоянного тока.
Таблица 6. Результаты моделирования с опорными значениями мощности, скорректированными на потери мощности постоянного тока
Table 6. Simulation results with power references adjusted for dc power losses
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P dc (МВт) |
461.3 |
-401.8 |
456.8 |
297.3 |
-799.3 |
|
U dc (кВ) |
794.5 |
796.2 |
800.2 |
798.5 |
784 |
|
P*c (МВт) |
400 |
-400 |
514.4 |
300 |
-800 |
|
P dc, error (МВт) |
61.3 |
-1.8 |
-57.6 |
-2.7 |
0.7 |
Таблица 7. Результаты моделирования с опорными значениями, скорректированными как для разности напряжений, так и для потерь мощности в линии постоянного тока
Table 7. Simulation results with references adjusted for both dc voltage differences and dc power losses
|
Терминал № |
1 |
2 |
3 |
4 |
5 |
|
P dc (МВт) |
399.9 |
-402.4 |
518.1 |
299.5 |
-799.8 |
|
U dc (кВ) |
791.4 |
793.6 |
797.7 |
795.8 |
7981.1 |
|
Pdc (МВт) |
400 |
-400 |
514.4 |
300 |
-800 |
|
P dc, error (МВт) |
-0.1 |
-2.4 |
3.7 |
-0.5 |
0.2 |
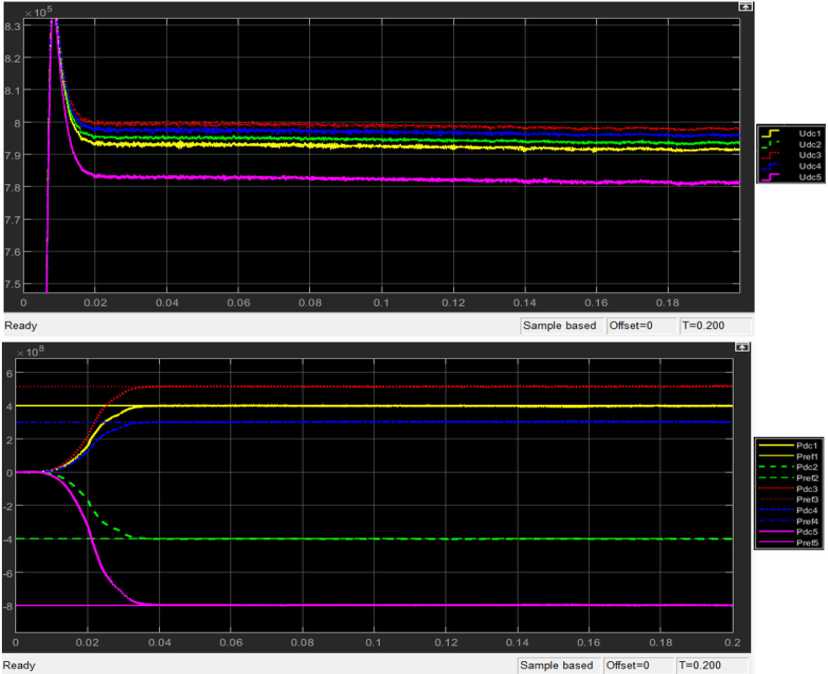
Рис. 5. Реакции управления потоком мощности в неидеальной сети постоянного тока (с влиянием сопротивления линии постоянного тока, компенсируемого соответствующим назначением опорных значений напряжения и мощности)
-
Fig. 5. Power flow control responses in non-ideal dc grid (with impact of dc line resistances offset by appropriate assignment of the voltage and power reference values)
Выводы
Исследование влияния сопротивления линии постоянного тока на управление потоком мощности в многотерминальных ПИН-ВППТ с управлением снижения напряжения постоянного тока показало, что снижение напряжения в сети постоянного тока и потери мощности в линии постоянного тока могут вызывать отклонения потока мощности, если их не учитывать должным образом при определении опорной мощности преобразователя и опорного напряжения постоянного тока.
Результаты моделирования показали, что использование анализа потока нагрузки постоянного тока при определении опорной мощности преобразователя и опорного напряжения постоянного тока позволяет точно управлять потоком мощности в сети постоянного тока.
Большая часть ошибок потока мощности в сети МППТ из-за неправильного определения опорного напряжения постоянного тока преобразователя и небольшая часть ошибок потока мощности из-за неправильного определения опорной мощности преобразователя.
Список литературы / Referenсеs
-
[1] Вафин Ш. И., Видинеев А. В. Оценка экономической целесообразности перевода воздушных линий переменного тока 500–750 кв на постоянный ток. Журнал Энергетика Татарстана , 2015, 4(40), 56–62 [Vafin Sh. I., Vidineev A. V. Estimation of the economic expediency of the transfer overhead lines of alternating current 500–750 kv into the direct current, J. Energy of Tatarstan , 2015, 4(40), 56–62 (in Rus.)].
-
[2] Reiner Foerst., Gerhard Heyner., Karl Weiner Kanngeisser., Herman Waldmann. Multiterminal Operation of HVDC Converter Station, J. IEEE Transactions on Power Apparatus and Systems ., 1969, 88(7), 1042–1052.
-
[3] Tastsuhito Nakajima., Shichi Irowaka. A Control for HVDC Transmission by Voltage Sourced Converters, J. IEEE Power Engineering Society Summer Meeting ., 1999, 99(2), 1113–1119.
-
[4] Weixing Lu., Boon-Teck Ooi. Optimal Acquisition and Aggregation of Offshore Wind Power by Multiterminal Voltage-Source HVDC, J. IEEE Transactions on Power Delivery ., 2003, 18(1), 201– 206.
-
[5] Weixing Lu., Boon-Teck Ooi. Premium Quality Power Park Based on Multi-terminal HVDC , J. IEEE Transactions on Power Delivery ., 2005, 20(2), 973–983.
-
[6] Fernando D. Bianchi., José Luis Domínguez-García., Oriol Gomis-Bellmunt. Control of multiterminal HVDC networks towards wind power integration, J. ELSEVIER. Renewable and Sustainable Energy Reviews ., 2016, 55, 1055–1068.
-
[7] Eduardo Prieto-Araujo., Agustí Egea-Alvarez., Sajjad Fekriasl., Oriol Gomis-Bellmunt. DC Voltage Droop Control Design for Multiterminal HVDC Systems Considering AC and DC Grid Dynamics, J. IEEE Transactions on Power Delivery ., 2016, 31(2), 575–585.
-
[8] Enric Sánchez-Sánchez., Eduardo Prieto-Araujo., Oriol Gomis-Bellmunt., Samuel Galceran-Arellano. Systematic and optimal design of droop-controlled MMCs in MT-HVDC networks, J. Electrical Power and Energy Systems ., 2022, 1–6.
-
[9] Thams F., Eriksson R., Molinas M. Interaction of droop control structures and its inherent effect on the power transfer limits in multiterminal VSC-HVDC, J. IEEE Trans Power Deliv ., 2017, 32(1), 182–192.
-
[10] Johnson B. K., Lasseter R. H., Alvarado L. F., Adapa R. Expandable Multiterminal Dc Systems Based on Voltage Droop, J. IEEE Transaction on Power Delivery ., 1993, 8(4), 1926–1932.
-
[11] Hendriks R. L., Paap G. C., Kling W. L. Control jf Multi-terminal VSC Transmission Scheme for Interconnecting Offshore Wind Farms, J. European WindEnergy Conference and Exhibition ., 2007, 1–8.
-
[12] Lie XU., Barry W. Williams., Liangzhong Yao. Multi-terminal DC Transmission Systems for Connecting Large Offshore Wind Farms, J. IEEE Power and Energy Society General Meeting. , 2008, 1–7.
-
[13] Rakibuzzaman Shah., Jesus C. Sánchez., Robin Preece., Mike Barnes. Stability and control of mixed AC–DC systems with VSC-HVDC, J. IET The Institution of Engineering and Technology ., 2018, 12(10), 2207–2219.
-
[14] Agustí Egea-Alvarez., Fernando Bianchi., Adrià Junyent-Ferré., Gabriel Gross., Oriol Gomis-Bellmunt. Voltage Control of Multiterminal VSC-HVDC Transmission Systems for Offshore Wind Power Plants, J. IEEE Transactions on Industrial Electronics ., 2013, 60(6), 2381–2391.
-
[15] Hong Rao. Architecture of Nan’ao Multi-terminal VSC-HVDC System and Its Multifunctional Control, J. CSEE Power and Energy Systems ., 2015, 1(1), 9–18.
-
[16] Biyadgie Ayalew., Mohamed Shawky El Moursi., Ehab F. El-Saadany. Enhanced DC Voltage Regulation and Transient Response for Multi-Terminal VSC-HVDC System Using Direct Power Control, J. IEEE Transactions on Power Systems ., 2022, 37(4), 25382548.
-
[17] Wenyuan Wang., Mike Barnes. Power Flow Algorithms for Multi-Terminal VSC-HVDC With Droop Control, J. IEEE Transactions on Power Systems ., 2014, 29(4), 1721–1730.
-
[18] Li et al B. A novel method to determine droop coefficients of DC voltage control for VSC– MTDC system, J. IEEE Trans. Power Del ., 2020, 35(5), 2196–2211.
-
[19] Prieto-Araujo E., Egea-Alvarez A., Fekriasl S., Gomis-Bellmunt O. DC voltage droop control design for multiterminal HVDC systems considering AC and DC grid dynamics, J. IEEE Trans. Power Del ., 2016, 31(2), 575–585.
-
[20] Yizhen Wang., Weijie Wen., Chengshan Wang., Haitao Liu., Xin Zhan., Xiaolong Xiao. Adaptive Voltage Droop Method of Multiterminal VSC-HVDC Systems for DC Voltage Deviation and Power Sharing, J. IEEE Transactions on Power Delivery ., 2019, 34(1), 169–176.
-
[21] Haileselassie T. M., Uhlen K. Impact of dc line voltage drops on power flow of MTDC using droop control , J. IEEE Trans. Power Syst ., 2012, 27(3), 1441–1449.
-
[22] Wang W., Barnes M. Power flow algorithms for multi-terminal VSC-HVDC with droop control, J. IEEE Trans. Power Syst ., 2014, 29(4), 1721–1730.
-
[23] Chen X., Wang L., Sun H., Chen Y. Fuzzy logic based adaptive droop control in multiterminal HVDC for wind power integration, J. IEEE Trans. Energy Convers ., 2017, 32(3), 1200–1208.
-
[24] Xiao L., Xu Z., An T., Bian Z. Improved analytical model for the study of steady state performance of droop-controlled VSC–MTDC systems, J. IEEE Trans. Power Syst ., 2017, 32 (3), 2083–2093.
-
[25] Kirakosyan A., El-Saadany E.F., Moursi M. E., Acharya S., Hosani K. A. Control approach for the multi-terminal HVDC system for the accurate power sharing, J. IEEE Trans. Power Syst. , 2018, 33(4), 4323–4334.
Список литературы Управление потоком мощности в многотерминальных электротехнических комплексах с учетом влияния сопротивления линии постоянного тока
- Вафин Ш. И., Видинеев А. В. Оценка экономической целесообразности перевода воздушных линий переменного тока 500–750 кв на постоянный ток. Журнал Энергетика Татарстана, 2015, 4(40), 56–62 [Vafin Sh. I., Vidineev A. V. Estimation of the economic expediency of the transfer overhead lines of alternating current 500–750 kv into the direct current, J. Energy of Tatarstan, 2015, 4(40), 56–62 (in Rus.)].
- Reiner Foerst., Gerhard Heyner., Karl Weiner Kanngeisser., Herman Waldmann. Multiterminal Operation of HVDC Converter Station, J. IEEE Transactions on Power Apparatus and Systems., 1969, 88(7), 1042–1052.
- Tastsuhito Nakajima., Shichi Irowaka. A Control for HVDC Transmission by Voltage Sourced Converters, J. IEEE Power Engineering Society Summer Meeting., 1999, 99(2), 1113–1119.
- Weixing Lu., Boon-Teck Ooi. Optimal Acquisition and Aggregation of Offshore Wind Power by Multiterminal Voltage-Source HVDC, J. IEEE Transactions on Power Delivery., 2003, 18(1), 201– 206.
- Weixing Lu., Boon-Teck Ooi. Premium Quality Power Park Based on Multi-terminal HVDC, J. IEEE Transactions on Power Delivery., 2005, 20(2), 973–983.
- Fernando D. Bianchi., José Luis Domínguez-García., Oriol Gomis-Bellmunt. Control of multi-terminal HVDC networks towards wind power integration, J. ELSEVIER. Renewable and Sustainable Energy Reviews., 2016, 55, 1055–1068.
- Eduardo Prieto-Araujo., Agustí Egea-Alvarez., Sajjad Fekriasl., Oriol Gomis-Bellmunt. DC Voltage Droop Control Design for Multiterminal HVDC Systems Considering AC and DC Grid Dynamics, J. IEEE Transactions on Power Delivery., 2016, 31(2), 575–585.
- Enric Sánchez-Sánchez., Eduardo Prieto-Araujo., Oriol Gomis-Bellmunt., Samuel Galceran-Arellano. Systematic and optimal design of droop-controlled MMCs in MT-HVDC networks, J. Electrical Power and Energy Systems., 2022, 1–6.
- Thams F., Eriksson R., Molinas M. Interaction of droop control structures and its inherent effect on the power transfer limits in multiterminal VSC-HVDC, J. IEEE Trans Power Deliv., 2017, 32(1), 182–192.
- Johnson B. K., Lasseter R. H., Alvarado L. F., Adapa R. Expandable Multiterminal Dc Systems Based on Voltage Droop, J. IEEE Transaction on Power Delivery., 1993, 8(4), 1926–1932.
- Hendriks R. L., Paap G. C., Kling W. L. Control jf Multi-terminal VSC Transmission Scheme for Interconnecting Offshore Wind Farms, J. European WindEnergy Conference and Exhibition., 2007, 1–8.
- Lie XU., Barry W. Williams., Liangzhong Yao. Multi-terminal DC Transmission Systems for Connecting Large Offshore Wind Farms, J. IEEE Power and Energy Society General Meeting., 2008, 1–7.
- Rakibuzzaman Shah., Jesus C. Sánchez., Robin Preece., Mike Barnes. Stability and control of mixed AC–DC systems with VSC-HVDC, J. IET The Institution of Engineering and Technology., 2018, 12(10), 2207–2219.
- Agustí Egea-Alvarez., Fernando Bianchi., Adrià Junyent-Ferré., Gabriel Gross., Oriol Gomis-Bellmunt. Voltage Control of Multiterminal VSC-HVDC Transmission Systems for Offshore Wind Power Plants, J. IEEE Transactions on Industrial Electronics., 2013, 60(6), 2381–2391.
- Hong Rao. Architecture of Nan’ao Multi-terminal VSC-HVDC System and Its Multi-functional Control, J. CSEE Power and Energy Systems., 2015, 1(1), 9–18.
- Biyadgie Ayalew., Mohamed Shawky El Moursi., Ehab F. El-Saadany. Enhanced DC Voltage Regulation and Transient Response for Multi-Terminal VSC-HVDC System Using Direct Power Control, J. IEEE Transactions on Power Systems., 2022, 37(4), 25382548.
- Wenyuan Wang., Mike Barnes. Power Flow Algorithms for Multi-Terminal VSC-HVDC With Droop Control, J. IEEE Transactions on Power Systems., 2014, 29(4), 1721–1730.
- Li et al B. A novel method to determine droop coefficients of DC voltage control for VSC– MTDC system, J. IEEE Trans. Power Del., 2020, 35(5), 2196–2211.
- Prieto-Araujo E., Egea-Alvarez A., Fekriasl S., Gomis-Bellmunt O. DC voltage droop control design for multiterminal HVDC systems considering AC and DC grid dynamics, J. IEEE Trans. Power Del., 2016, 31(2), 575–585.
- Yizhen Wang., Weijie Wen., Chengshan Wang., Haitao Liu., Xin Zhan., Xiaolong Xiao. Adaptive Voltage Droop Method of Multiterminal VSC-HVDC Systems for DC Voltage Deviation and Power Sharing, J. IEEE Transactions on Power Delivery., 2019, 34(1), 169–176.
- Haileselassie T. M., Uhlen K. Impact of dc line voltage drops on power flow of MTDC using droop control, J. IEEE Trans. Power Syst., 2012, 27(3), 1441–1449.
- Wang W., Barnes M. Power flow algorithms for multi-terminal VSC-HVDC with droop control, J. IEEE Trans. Power Syst., 2014, 29(4), 1721–1730.
- Chen X., Wang L., Sun H., Chen Y. Fuzzy logic based adaptive droop control in multi-terminal HVDC for wind power integration, J. IEEE Trans. Energy Convers., 2017, 32(3), 1200–1208.
- Xiao L., Xu Z., An T., Bian Z. Improved analytical model for the study of steady state performance of droop-controlled VSC–MTDC systems, J. IEEE Trans. Power Syst., 2017, 32 (3), 2083–2093.
- Kirakosyan A., El-Saadany E.F., Moursi M. E., Acharya S., Hosani K. A. Control approach for the multi-terminal HVDC system for the accurate power sharing, J. IEEE Trans. Power Syst., 2018, 33(4), 4323–4334.
