Управление при развертывании тросовой системы на эллиптической орбите

Автор: Ван Чанцин, Заболотнов Юрий Михайлович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-1 т.19, 2017 года.
Бесплатный доступ
Рассматривается управление при развертывании тросовой системы, находящейся на эллиптической околоземной орбите. Орбитальная система состоит из двух космических аппаратов, соединенных тросом. Предлагается новая номинальная программа управления, зависящая от параметров эллиптической орбиты и обеспечивающая развертывание системы в заданное вертикальное положение. Методом Лагранжа построена математическая модель движения тросовой системы, учитывающая особенности данной задачи. Проверочные расчеты осуществляются с использованием математической модели движения системы с распределенными параметрами, записанной в неподвижной геоцентрической системе координат. Используется система стабилизации, реализующая обратную связь по длине и скорости троса.
Космическая тросовая система, управление, эллиптическая орбита, программа развертывания
Короткий адрес: https://sciup.org/148205021
IDR: 148205021 | УДК: 629.7.087
Managment at deploying a tethered system in elliptical orbit
Management at deploying a tethered system, located in an elliptical Earth orbit is viewed. Orbital system consists of two spacecraft connected by a tether. The new nominal control program depending on the elliptical orbit parameters and providing deployment of the tether system in a given vertical position is offered. Lagrange's method of mathematical model of motion of the system, taking into account the peculiarities of this problem is obtained. Testing calculations are carried out using a mathematical model of motion of the system with distributed parameters recorded in the fixed geocentric coordinate system. System of the stabilization, implementing feedback on the length and speed of the tether is used.
Текст научной статьи Управление при развертывании тросовой системы на эллиптической орбите
тической орбиты, что позволяет уменьшить ошибки приведения КТС в заданное конечное состояние при работе системы регулирования выпуском троса.
В настоящей работе рассматривается КТС, состоящая из базового и малого космических аппаратов (КА). Предполагается, что масса базового КА, с которого осуществляется выпуск троса, много больше, чем массы малого КА и троса. Предлагается номинальная программа развертывания КТС на эллиптической орбите в вертикальное положение, обеспечивающая выпуск троса на заданную конечную длину. Рассматриваемая программа не требует решения краевой задачи о приведение системы в заданное состояние, так как конечное положение КТС обладает свойством асимптотической устойчивости.
Для определения программы развертывания КТС построена математическая модель движения КТС в орбитальной подвижной системе координат, учитывающая массу троса [13] и параметры эллиптической орбиты. Параметры программы управления выбираются из условия приведения КТС в заданное состояние. Программы управления предназначены для механизмов выпуска троса, работающих только на торможение и не втягивающих трос [2].
Проверка возможности использования предлагаемой программы и принятых допущений проводится с применением конечно элементной модели движения КТС, в которой трос представляется как дискретная совокупность материальных точек, связанных между собой упругими связями. Данная модель записана в геоцентрической системе координат, при этом предполагается, что на каждом элементарном участке сила натяжения подчиняется закону Гука. Сила в механизме управления представляет собой сумму двух составляющих: программной силы и поправок к управлению, которые вычисляются в соответствии с принципом обратной связи по измерениям длины и скорости выпуска троса. При моделировании работы системы стабилизации не учитываются запаздывание, ошибки измерений и другие возмущения, связанные с функционированием реальной системы управления.
МОДЕЛЬ ДЛЯ ПОСТРОЕНИЯ ПРОГРАММЫ РАЗВЕРТЫВНИЯ КТС
При выводе уравнений движения предполагается, что центр масс системы движется по невозмущенной эллиптической орбите и совпадает с центром масс базового КА. Трос считается нерастяжимым. При описании движения КТС

Рис. 1. Взаимное положение систем координат Cxo yo zo и Cx t y t z t
используется следующие правые прямоугольные системы координат (рис. 1): 1) орбитальная подвижная система координат Cxoyozo, где C – центр масс системы, ось Cxo направлена по радиус–вектору Rc , ось Cyo – в плоскости орбиты по направлению орбитального движения; 2) система координат, связанная с тросом Cxtytzt, где ось Cxt направлена по тросу от малого КА, ось Cyt лежит в плоскости, прохо- дящей через радиус–вектор Rc и трос. Матрица перехода между системами координат Cxo yo zo и Cxt yt zt определяется стандартным образом через углы 9, в (рис. 1).
Для вывода уравнений пространственного движения КТС используются уравнения Лагран- жа второго рода d (5 T ) 5 T 5P
--c —c =-- + Q i ;
dt к 5 q i ) 5 q t 5 q t
где Q x = L , q 2 = 9 , q 3 = в - обобщенные координаты, Tc и P – кинетическая и потенциальная энергии системы, L - длина троса, 9 и в - углы, определяющие положение троса относительно плоскости орбиты базового КА, Qi – обобщенные непотенциальные силы.
Кинетическая энергия в уравнениях (1) представляет собой сумму
Тс = 2 m ( X 2 + y 2 + z 2 ) + Tt , (2)
где Tt – кинетическая энергия троса; x , y , z – координаты малого КА в неподвижной геоцентрической системе координат, связанной с невозмущенной эллиптической орбитой центра масс системы.
Координаты центра масс малого КА вычисляются следующим образом x = (Rc -LcosOcosP)cosu + LsinOsinu , y = (Rc -LcosOcosP)sinu -LsinOcosu, (3) z = - LcosOsinP, где u – аргумент широты.
При выводе уравнений предполагается, что параметры эллиптической орбиты за время развертывания КТС не изменяются.
Кинетическая энергия троса как любой механической системы складывается из кинетической энергии движения центра масс и кинетической энергии движения троса относительно своего центра масс ( Tr ). Поэтому
1 э
T. = L a V , 2 + T , (4)
где V t - скорость центра масс троса, a - линейная плотность троса.
Вектор скорости центра масс троса состоит из следующих составляющих
V = V C + V S + V r , (5)
г д е Vc – вектор скорости центра масс системы, Vs – вектор скорости центра масс троса относительно центра масс системы за счет вращения тросовой системы координат, Vr – вектор скорости центра масс троса относительно центра масс системы, обусловленный изменением длины троса Vr = L .
Составляющие вектора Vc в неподвижной системе координат имеют вид
■
V™ = RP cos u - Ru sin u , cx c c
■
V cy = R c sin u + R c u cos u , (6)
V cz = 0 .
Компоненты вектора Vs определяются следующим образом
|
V sx |
to sx |
|
|
у sy |
= D |
to sy |
|
V V sz 7 |
V to sz 7 |
L
,
где D = D T D T D T - матрица перехода от тросовой системы координат Cxt yt zt к неподвижной системе координат, D u , D p , D о - матрицы элементарных вращений [16], ( T ) - знак транспонирования матрицы, to sx , to sy , to sz - проекции вектора угловой скорости вращения тросовой системы координат Cxt yt zt относительно неподвижной геоцентрической системы координат (проекции определяются в системе Cxt yt zt ).
Угловые скорости tosx, tosy, tosz определяются из следующих выражений to= psinO- U cosOsinp, to sy = pcosO + U sinOsinP, (8)
to sz = O + U cosp .
Компоненты вектора Vr в неподвижной системе координат определяются следующим об-
щении относительно своего центра масс опре- деляется из выражения
Tr = I J ( to ? y + to^ z ) , (10)
где Jt = n L 3 /12 - момент инерции троса относительного своего центра масс.
Выражения (3–10) определяют зависимость кинетической энергии КТС от обобщенных координат и скоростей, что позволяет использовать их в уравнениях Лагранжа (1).
Для получения обобщенных сил, обусловленных гравитационным полем Земли, воспользуемся выражениями
П m = - Km / r , n t = J dn t , (11)
L где K – гравитационный параметр Земли, r = д/RC + L - 2LRc cos O cos p,
K p ds
JR ^ + s 2 - 2 sRc cos Ocosp
Потенциальная энергию троса запишем в виде nt=-KpL12 2 ds-----------. <12> о ^RC + s2 - 2sRc cosOcosp
Разлагая функции Пт , dn t в ряды по параметрам L , s и сохраняя члены до второго порядка включительно, получим
Пт =- Km 1 + L cosOcosp + 2 L 2 ( 3cos2Ocos2p - 1 ) ,(13)
c
, _ K p ds t ~- r
1 + s cosOcosp + 2- s 2 ( 3cos2 Ocos2p - 1 ) .(14)
Приближенные выражения (13–14) можно использовать, когда L / R c << 1 и x / R c << 1 . Вычисляя интеграл (12) с учетом (14) и дифференцируя потенциальные энергии по обобщенным координатам, получим
Q L = L ( m + L p / 2 ) v 1 U 2 ( 3cos2 Ocos2 p - 1 ) ,
Qo = - 2 JevVz 2cos2psin2O, (15) Qp = - 2 Je v-1U2 cos2 Osin2p, где Je = L2(m + Lp/3), v = 1 + ecos^, 9 - истинная аномалия, e – эксцентриситет орбиты, Rc = p / v - уравнение орбиты, p - параметр орбиты.
К действующим силам необходимо добавить силу натяжения T в точке выпуска троса, совершающую работу только на возможном переме-щении 5 L .
Дифференцируя кинетическую энергию (2), учитывая потенциальные силы (15) и силу натяжения троса, получим в соответствии с уравнениями Лагранжа (1) систему дифференциальных уравнений движения КТС
L = M 1 L [ O2 + (1 - v - 1) U 2 + 20 U cosp -
-
- U 2 cos2 0 sin2 p + 20 U cosp - U 2 cos2 0 sin2 p +
-
+ 20 Ui cos p - Ui 2 cos2 0 sin2 p + p2 cos2 0 +
T + p / "2
+ и|3sinpsin20 + 3v 1 u 2 cos2 Ocos2 p" l---—, (16)
J m + p L
i
0 = - 2 M 2 — (0 + u i cos p) + zi 2 sin 0 cos 0 sin 2 p -
-
- ii cosp - 2p 2 sin 20+2 z i p cos 2 Osinp -
- |-v - 1z i 2 sin20cos 2 p , (17)
P cos2 9 = - M 2 L (2[3 cos2 0 + U sin 20 sin P) +
+0p sin20 - U sin20 sinP - 2/10 cos20 sinP -
- 2v - 1 U 2cos20sin2P, (18)
где M i =
m + n L /2 ... m + n L /2
--------, M 2 =-------- m + nL m + nL / 3
Производные аргумента широты u по времени определяются известными выражениями U = -^3 ( 1 + ecos d ) u = - e sin У , (19) p 3 p 3
,
где У = u - w n , ® п - аргумент перицентра.
Таким образом, в системе уравнений (17–19) имеется параметрическое периодическое возмущение, связанное с неравномерным изменением угла u . При записи уравнений (17–19) полагается R c « 0 .
ПРОГРАММА РАЗВЕРТЫВНИЯ КТС НА ЭЛЛИПТИЧЕСКОЙ ОРБИТЕ
Полученные уравнения (16–18) могут быть использованы для построения номинальной программы развертывания КТС в вертикальное положение при движении центра масс системы по эллиптической орбите. Если e = 0, то урав- нения (16–18) совпадают с аналогичными уравнениями, полученными в работе [13].
Если исходная орбита круговая, то закон развертывания КТС в вертикальное положение получен в работе [13] и имеет вид
T = ( m + n L /2 ) Q 2
• a (L - Lk ) + b ^ + 3 L
, (20)
где LK – длина троса в конечном положении системы, a , b , c – параметры закона, Q = U = const - угловая скорость движения центра масс системы по круговой орбите.
Если программная сила натяжения троса задана в виде (20), то система (16-18) при e = 0 будет иметь асимптотически устойчивые вертикальные положения равновесия 9 = 0 и 9 = п ( 0 = L = p = P = о , L = L K ф 0 ), когда a > 3 , b > 0 [13].
Аналогичный результат можно получить и для эллиптической орбиты ( e > 0 ), если пренебречь u ‘« 0 в уравнении (17). Тогда в положении равновесия КТС L = L = 0 = 0 = P = р = 0 из уравнения (17) следует
( m + р L /2 ) LU 2 ( 1 + 2v - 1 ) - T = 0 . (21)
Здесь производная U определяется для эллиптической орбиты: U = Q e v2 , где Я e = VK / p 3 .
Тогда, чтобы система (16–18) имела устойчивое положение равновесия на эллиптической орбите при L = L k ф 0 , силу натяжения необходимо определять из выражения
T = ( m + р L /2 ) Q2
a ( L - L K ) + b Q + c ( У ) L
,(22)
где c(У) = v(У)3 (2 + v(У)), v (У) = 1 + e cosy.
Выражение (22) обобщает программу (20) на эллиптические орбиты, причем сила натяжения T теперь зависит от истинной аномалии У , то есть от положения центра масс системы на эллиптической орбите. Очевидно, что при у ( У ) = 1 , когда e = 0 , программа (22) совпадает с программой (20). Вертикальные положения равновесия 9 = 0 и 9 = п в плоском случае ( р = р = 0 ) будут асимптотически устойчивы при любой длине L k , если a > c ( У ) и b > 0 . Данное утверждение доказывается с помощью стандартного метода построения линеаризованной системы относительно исследуемого положения равновесия. Причем в линеаризованной системе уравнения для переменных р,р отделяются, и их характеристическое уравнение имеет всегда чисто мнимые корни. Матрица, соответствующая остальным уравнениям линеаризованной системы, имеет при выполнении условий a > c ( У ) , b > 0 всегда собственные значения с отрицательными действительными частями. Поэтому плоское движение КТС в этом случае при L = L k Ф 0 имеет асимптотически устойчивые заданные вертикальные положения равновесия.
Введение допущения У « 0 позволяет с одной стороны получить явное выражение для силы натяжения троса (22), а другой стороны приводит к возникновению колебаний угла 9 относительно вертикальных положений равновесия. Причем, как следует из выражений (19), эти колебания тем больше, чем больше эксцентриситет e . Однако это не приводит к колебаниям скорости выпуска троса относительно нуля, • ■ так как от переменной У правая часть уравнения (16) не зависит. Приведенные рассуждения подтверждаются также численными оценками по более сложной модели, которые приводятся ниже.
В качестве примера на рис. 2 показаны две траектории малого КА относительно базового КА (начало координат), вычисленные с использованием программы (22), учитывающей эллиптичность орбиты (e = 0.02, сплошная линия), и с использованием программы (20), заданной для круговой орбиты [13]. Не учет эллиптич- ности орбиты ведет к большим отклонениям вывода груза на вертикаль, которые при длине троса LK = 30 км достигают 1.5 км. Параметры законов a — 4, b — 3.7. Начальная высота орбиты 1000 км, масса малого КА m = 20 кг. Кроме того, не учет эллиптичности орбиты приводит к появлению отрицательных значений скорости выпуска троса (рис. 3), что для применяемых в настоящее время механизмов выпуска троса, работающих только на торможение, не допустимо. На рис.3 сплошной линией показана зависимость L (t) , вычисленная с использованием закона (22), а штриховой линией – та же зависимость, определенная в соответствии с законом (20).
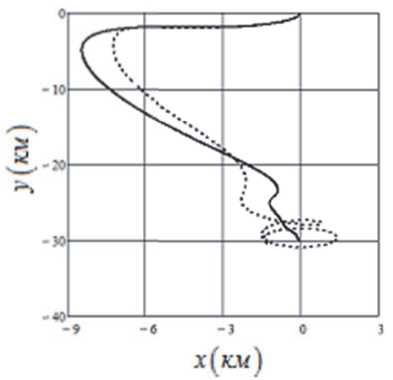
Рис. 2. Номинальные траектории движения малого КА относительно базового КА (начало координат): сплошная линия – программа (22), штриховая линия – программа (20)
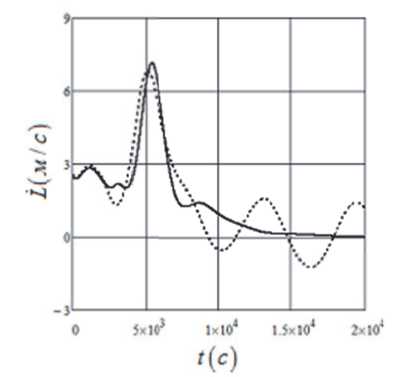
Рис. 3. Скорости выпуска троса: сплошная линия – программа (22), штриховая линия – программа (20)
Здесь надо отметить, что программы развертывания КТС в вертикальное положение часто используются в качестве составной части более сложных программ выпуска троса. Так, напри- мер, в реальном тросовом эксперименте YES2 [2] программа развертывания троса в вертикальное положение использовалась в качестве первого этапа формирования системы, причем на втором этапе применялись программы быстрого развертывания, включающие в себя участки разгона и торможения [2, 14–16]. Возникновение ошибок приведения на вертикаль на первом этапе развертывания троса из–за не учета эллиптичности орбиты неизбежно ведет к резкому возрастанию погрешностей на втором этапе, так как программы быстрого выпуска троса чувствительны к начальным отклонениям.
МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ КТС В ГЕОЦЕНТРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
Оценка допустимости принятых упрощений и предлагаемой программы развертывания КТС на эллиптической орбите проводится по более полной модели движения, в которой трос представлялся как совокупность n материальных точек с упругими и односторонними механическими связями. Данная дискретная модель описывает движение КТС как системы с распределенными параметрами. Подобные модели обычно используются, как эталонные, для оценки применимости более простых моделей [13], [17]. Силы натяжения между точками определяются по закону Гука. Аэродинамические силы, диссипативные силы внутри троса и движение относительно центров масс концевых тел (космических аппаратов) в данном случае не учитываются. Движение происходит в центральном ньютоновском поле и описывается в неподвижной геоцентрической системе координат. При достаточно большом количестве точек n данная модель близка к математической модели с распределенными параметрами, которая представляет собой систему дифференциальных уравнений в частных производных [1].
Уравнения движения КТС записываются в виде drk dVk
---— Vi mi ----— Gi + Ti — T , (23) dt к k dt k k k + 1
Список литературы Управление при развертывании тросовой системы на эллиптической орбите
- Белецкий В.В., Левин Е.М. Динамика космических тросовых систем. М.: Наука, 1990. 336 с.
- Kruijff M. Tethers in Space. The Netherlands: Delta-Utec Space Research, 2011. 432 p.
- Zabolotnov Yu. Introduction of Space tether system motion dynamics and control. Beijing: Science Press, 2013. 140 p.
- Zhong R., Zhu Z. Optimal trajectory design of a deorbiting electrodynamic tether system//Int. J. Space Science and Engineering. 2013. V. 1. No.2. Pp. 128-141.
- Zabolotnov Yu.М., Elenev D.V. Stability of Motion of Two Rigid Bodies Connected by a Cable in the Atmosphere//Mechanics of Solids. 2013. V.48. No. 2. P. 156-164.
- Aslanov V.S., Ledkov A.S. Dynamic of the Tethered Satellite Systems. Cambridge, UK. 2012. 356 p.
- Zhai G., Qiu Y., Liang B., Li C. On-Orbit Capture with Flexible Tether-Net System//Acta Astronautica. 2009. Vol. 65. No. 5. Pp. 613-623.
- Fujii H.A., Ichiki W., Suda S.I., Watanabe T.R. Chaos analysis on librational control of gravity-gradient satellite in elliptic orbit//J. Guid. Control Dyn. 2000. V.23. Pp. 145-146.
- Iсarrea M. Chaos and its control in the pitch motion of an asymmetric magnetic spacecraft in polar elliptic orbit//Chaos Soli-tons Fractals. 2009. V.40. Pp. 1637-1652.
- Icarrea M., Lanchares V., Pascual A.I., Salas J.P. Attitude stabilization of electrodynamic tethers in elliptic orbits by time-delay feedback control//2014. Acta Astronautica. 2014. V.96. Pp. 280-295.
- Kojima H., Sugimoto T. Stability analysis of in-plane and out-of-plane periodic motions of electrodynamic tether system in inclined elliptic orbit//Acta Astronautica. 2009. Vol.65. Pp. 477-488.
- Kojima H., Iwasaki M., Fujii H.A., Blanksby C., Trivailo P. Nonlinear control of librational motion of tethered satellites in elliptic orbits//2004. J. Guid. Control Dyn. 2004. V.27. Pp. 229-239.
- Заболотнов Ю.М. Управление развертыванием орбитальной тросовой системы в вертикальное положение с малым грузом//Прикладная математика и механика. 2015. Т.79. № 1. С. 28-34.
- Ишков С.А., Наумов С.А. Управление развертыванием орбитальной тросовой системы//Вестник Самарского государственного аэрокосмического университета имени академика С.П. Королёва. 2006. № 1(5). С. 81-90.
- Zabolotnov Yu., Naumov O. Methods of the analysis of motion of small space vehicles around the centre of masses at deployment of space tether system//Int. J. Space Science and Engineering. 2014. V. 2. No.4. Pp. 305-326.
- Заболотнов Ю.М., Наумов О.Н. Движение спускаемой капсулы относительно центра масс при развертывании орбитальной тросовой системы//Космические исследования. 2012. Т.50. №2. С. 177-187.
- Дигнат Ф., Шилен В. Управление колебаниями орбитальной тросовой системы//Прикладная математика и механика. 2000. Т. 64. № 5. С. 747-754.
