Управление шаговыми двигателями

Бесплатный доступ
Статья посвящена рассмотрению способов управления шаговыми двигателями. Отличительные особенности шаговых двигателей.
Шаговый двигатель, модуль, постоянныйток, фаза
Короткий адрес: https://sciup.org/140288397
IDR: 140288397 | УДК: 621.313.13
Stepper motor control
The article is devoted to the consideration of ways to control stepper motors.Distinctive features of stepper motors.
Текст научной статьи Управление шаговыми двигателями
Шаговый двигатель – это бесколлекторный двигатель постоянного тока, наиболее общая разновидность которого представлена на Рисунке 1. В некоторой технической литературе его ошибочно относят к многофазным (чаще двухфазным) двигателям. Это не совсем верно. Действительно, и это будет рассмотрено ниже, есть такой режим управления, который с некоторой натяжкой можно отнести к фазовому, но это совершенно не означает «фазовость» такого двигателя в общем понимании этого термина, применимом к двигателям переменного тока.

Рисунок 1 - Биполярный гибридный шаговый двигатель
Что делает шаговые двигатели такими привлекательными для разработчиков, и что недостижимо с двигателями других типов? Шаговый двигатель имеет значительно бóльшую надежность и, что совсем немаловажно для целого ряда практических применений, он, в отличие от коллекторного двигателя, практически не увеличивает уровень паразитных электромагнитных и радиопомех. Причина кроется как раз в отсутствии подвижного контакта токосъемника. Однако отсутствие коллектора, переключающего для формирования момента вращения направление тока в обмотках, требует внешнего управления - коммутатора. Тут, повторю французскую пословицу - «За каждое удовольствие нужно платить»[1].
Имеется несколько вариантов управления шаговым двигателем (Рисунок 3). На рисунках приведена не форма напряжения, что вы обычно встретите в литературе и на интернет сайтах, а форма тока. Это важно! В управлении шаговым двигателем важен именно ток, а не приложенное к обмоткам напряжение, которое имеет прямоугольную форму [2].
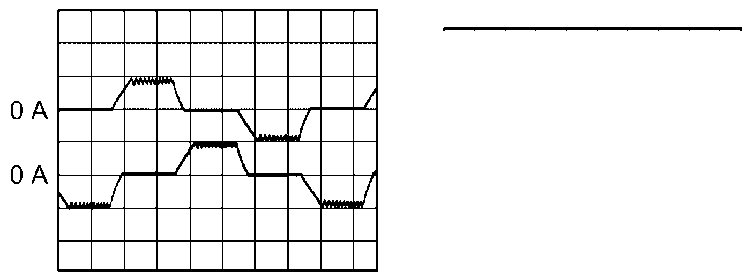
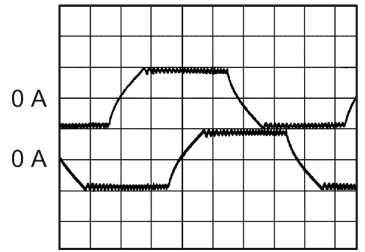
Рисунок 2 а)
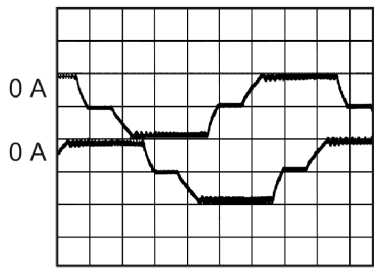
Рисунок 2 б)
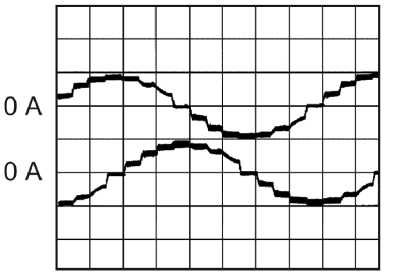
Рисунок 2 в) Рисунок 2 г)
Рассмотрим общие особенности. Итак, на Рисунке 3 показана форма тока в обмотках двигателя относительно нуля для четырех основных вариантов управления. Наиболее простой вариант – это попеременная коммутация фаз, при которой они не перекрываются, и в каждый момент времени включена только одна фаза (Рисунок 3а). Этот режим называют волновым или полношаговым режимом управления с одной фазой. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия у обесточенного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени используется только 50% обмоток, а для униполярного – 25%. Это означает, что в таком режиме не может быть получен полный возможный момент вращения.
Чаще всего используется управление с перекрытием фаз, когда в одно и то же время включены обе обмотки (Рисунок 3б). В общем случае именно его и называют полношаговым режимом управления. При этом способе управления ротор фиксируется в промежуточных позициях между полю- сами статора, обеспечивая примерно на 40% больший момент, чем в предыдущем варианте с одной включенной фазой. Этот способ управления обеспечивает такой же угол шага, как и волновой, но положение точек равновесия ротора смещено на полшага, что часто не является критическим. Иногда это необходимо учитывать для двигателей с большим шагом, так как обесточенный двигатель, например с шагом 18° после остановки сместится на 9°. Чтобы ротор такого двигателя не смещался при выключении, на двигатель в режиме остановки подают некоторый ток удержания, который сохранит заданное положение ротора. Именно это свойство шагового двигателя позволяет обходиться без специальных электромагнитных или механических тормозных муфт и удерживающих систем.
Третий основной способ управления является комбинацией двух описанных ранее и называется полушаговым режимом. В этом режиме двигатель за один импульс управления делает шаг, равный половине основного (Рисунок 3в). Этот режим требует более сложной схемы управления, но позволяет осуществлять более точное позиционирование ротора и уменьшает негативное влияние его механического резонанса. Иными словами, используя двигатель с угловым шагом 1.8°, мы получаем шаг, равный 0.9°.Еще меньшую градацию, вернее, дробление шага, дают микрошаговые системы управления, основанные на постепенном изменении тока в обмотках (Рисунок 3г). Такие системы достаточно сложны. Они требуют применения не только специальных ИМС драйверов с ЦАП, но и микропроцессорного управления. Именно этот режим часто приводит к путанице, в результате которой шаговые двигатели причисляют к многофазным двигателям переменного тока.
Драйверы шагового двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями[3].
Список литературы Управление шаговыми двигателями
- Рентюк, В. Шаговые двигатели и особенности их применения // Электрик. - 2012. - № 11. - С. 45-50 [Электронный ресурс]. URL: https://yadi.sk/d/kZzJlwnBAQJGK (дата обращения 1.12.2021)
- LMD18245 3A, 55V DMOS Full-Bridge Motor Driver, Texas Instruments Inc., April 2013 [Электронный ресурс]. URL: https://www.ti.com/lit/ds/symlink/lmd18245.pdf (дата обращения 1.12.2021)
- ARDUINOMASTER.RU.Всё для радиолюбителей [Электронный ресурс]. URL: https://arduinomaster.ru/( дата обращения 25.12.2021)
