Управление системой нелинейно связанных перевернутых маятников

Автор: Семнов М.Е., Попов М.А., Канищева О.И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 3 т.11, 2018 года.
Бесплатный доступ
Предложена математическая модель связанных обратных маятников в линейной и нелинейной постановке. Проведено исследование динамики этой механической системы и определены предельные параметры, обеспечивающие возможность стабилизации. Приведены результаты экспериментов для различных конфигураций системы. Построены зоны устойчивости в пространстве параметров в линейной и нелинейной постановке. Управление системой осуществляется по обратной связи. Введенная нелинейная жесткость пружины является частью динамического управления. При этом в фазовом пространстве существуют три стационарные точки, однако вещественные координаты имеет лишь одна из них. В результате проведенного исследования показано, что сложная неустойчивая система, состоящая из осцилляторов с нелинейной связью, может быть описана достаточно простой системой уравнений, а ее стабилизация при соблюдении определенных условий возможна с помощью достаточно простого управления периодической функцией по обратной связи.
Обратный маятник, связанные осцилляторы, стабилизация, управление
Короткий адрес: https://sciup.org/146279357
IDR: 146279357 | УДК: 517.9 | DOI: 10.17516/1999-494X-0040
Nonlinear related system of inverted pentulums control
In this paper we propose a linear and nonlinear mathematical model of linked inverse pendulums. We investigate dynamics of this mechanical system and determined the stability parameters. After that we presented results of experiments for various system configurations. In conclusion we constructed stability zones in the parameter space for linear and nonlinear systems. The system is controlled by feedback. The introduced nonlinear spring stiffness is part of the dynamic control. There are three stationary points in the phase space, however, only one of them has real coordinates. As a result of the study, it was shown that a complex unstable system consisting of oscillators with a nonlinear coupling can be described by a fairly simple system of equations, and its stabilization, under certain conditions, is possible with the help of a fairly simple control of the periodic feedback function.
Текст научной статьи Управление системой нелинейно связанных перевернутых маятников
Теория колебаний нелинейных систем широко применяется при моделировании различных физических явлений: колебания молекул в жидкостях и твердых телах, электрических цепях, состоящих из нескольких взаимосвязанных контуров и т.д. [1] В таких системах реализуются разнообразные дисперсионные зависимости, на основе которых исследуется распространение волн в нелинейных средах. Подавляющее большинство моделей таких систем основывается на законах движения простейших связанных осцилляторов и их цепочек, динамика которых формализуется посредством как линейных, так и нелинейных уравнений. В большинстве подобных задач рассматриваются колебания маятников, у которых нулевое положение является устойчивым [2-4]. Подробный обзор последних результатов в этой области приведен, например, в [5].
В то же время в ряде практически важных задач (например, колебания атомов в телах с большой температурой, проблема стабилизации плазмы) нулевое положение неустойчиво. В связи с этим отметим классическую задачу стабилизации верхнего положения обратного маятника [6]. При решении этой задачи основное внимание уделяется проблеме стабилизации неустойчивого положения равновесия маятника путем движений нижней точки крепления. Этой проблеме посвящено огромное количество публикаций, достаточно подробный обзор которых содержится в [7]. Особенностью жесткого маятника с осциллирующим креплением является возможность динамической стабилизации его верхнего положения. Задача стабилизации ма-– 281 – ятника с помощью вертикальных осцилляций точки крепления хорошо изучена и сводится к уравнению Матье [8]. Теоретическое объяснение этого явления было сделано Стефенсоном в 1908 г. [9]. Физическое объяснение динамической стабилизации перевернутого маятника вертикальными осцилляциями точки крепления (с помощью управления по обратной связи) было предложено академиком П.Л. Капицей в 1951 г., выполнившим детальное экспериментальное исследование этого явления [10]. Также отметим работы, в которых стабилизация верхнего неустойчивого положения осуществлялась посредством гистерезисного управления [11-14].
Постановка задачи
В настоящей работе рассматривается система, состоящая из двух перевернутых маятников массами т 1 и m 2 , связанных между собой пружиной с жесткостью к . Основная задача работы заключается в формировании такого закона управления горизонтальным движением точки крепления, при котором фазовые координаты системы остаются в ограниченной области фазового пространства. Иными словами, речь идет об условиях, накладываемых на параметры системы и управление, обеспечивающих диссипативность системы. Рассмотрим решение данной задачи для различных вариантов управления рассматриваемой системой (управление может быть приложено как к одному маятнику системы, так и к системе в целом) и в случае линейной и нелинейной жесткости системы.
Случай управления одним маятником
Рассмотрим систему с линейной жесткостью и управлением, приложенным к одному из маятников. Ее физическая модель представлена на рис. 1.
Задачу стабилизации будем решать в предположении, что тележка не имеет массы и движется без трения, а управляющее воздействие сообщает ей ускорение и . В этом случае уравнения динамики системы имеют вид
J 1 ф , = m 1 gl 1 sin ф , + kh 2 ( sin ф2 - sin ф , ) - u <
J 2 ф2 = m 2 gl 2 sin ф2 - kh 2 ( sin ф2 - sin ф , )
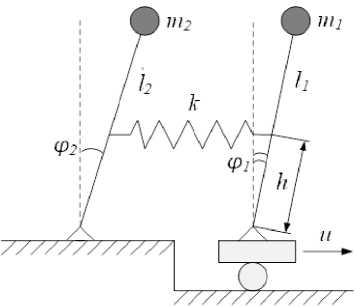
Рис. 1. Физическая модель связанных маятников
Fig. 1. Physical model of coupled pendulums
где ф 1 , ф 2 - углы отклонения маятников от вертикального положения. Предполагая отклонения от нулевого положения малыми, линеаризуем уравнения динамики. Тогда уравнения (1) примут вид
|
<Р ] _ |
f mxglx kh 2) k h 2 mxl 2 T1 T |ф ] + T Ф 2 V У JJ J J |
|
1- |
< 2 Л 2 ■ (2) m2gl2 kh 2 | khh |
|
ф 2 _ |
J J |ф 2 ' J ф 1 i и 2 и 2 1 и 2 |
Для дальнейшего рассмотрения систему (2) удобно представить в форме четырех уравнений первого порядка. Введем переменные: z 1 = ф 1 , z 2 = ф 1 , z 3 = ф 2, z 4 = ф 2 и обозначим
kh2 . mgl
J , J
- B . С учетом введенных обозначений динамика системы будет описываться
следующими уравнениями:
Z1 = z 2
z 2 = A 1 z 1 + B 1 z 3 + и
Z 3 = z 4
. z 4 = B 2 z + A 2 Z з
s
или, в матричной форме,
Z = Q z + bu ,
где Q =
A 1
I B 2
B 1 0
0 J
b =
Г 01
. 0 >
Сформируем алгоритм управления по принципу обратной
связи: u = -D • - • arctan (z x c), где D - параметр, характеризующий «интенсивность» управ- п ления. Отметим, что при отсутствии управления (D = 0) поведение системы будет определяться собственными числами матрицы системы. Эта матрица имеет четыре собственных числа:
\2
A 1 + A 2 + У( A 1 — A 2 ) 2 + 4 B i B 2 .
О ’ 3,4
А1 + A 2 —У ( A 1 - A 2 ) + 4 B1B B 2
. Два из них
Z X вещественные (одно положительно, второе отрицательно), а два других - чисто мнимые. Очевидно, что фазовое пространство делится на два подпространства. Колебания в одном из них (которое соответствует комплексным собственным числам) будут соответствовать особой точке центр, а во втором подпространстве особая точка – седло [8].
Таким образом, задача стабилизации нулевого положения, соответствующего вертикальному положению обоих маятников, заключается в подавлении эффекта положительного собственного числа [14]. Такая система детально описана в работе [15], в которой было показано, что при достаточно большом значении параметра D система (2) стабилизируема, - т.е. фазовые координаты остаются в ограниченной области фазового пространства. В настоящей рабо- те рассматривается пружина с нелинейной жесткостью, а именно предполагается изменение жесткости по закону k = к0 (1 + x2),
где x = h ( ф ! - ф2 ) или, во введенных выше обозначениях, x = h ( z 1 - z 3 ) . Таким образом, жесткость пружины, зависящая от взаимных отклонений маятников, является частью динамического управления. Перепишем систему (2), подставив в нее (5):
Ч = - 2
•
z 4 =
k 0 ( 1 + ( h ( z 1 z 3 ) ) ) h
k 0 ( 1+( h ( - 1 z 3
»‘)
h 2
/
J 2
z 1
+
m 2 gl 2
J 2
+ k 0 ( 1 + ( h ( -
+ J 1
_
k 0 ( 1+ ( h ( - 1
—
z 3 ) )2 ) h 2
z 3 + и
. (6)
—
z 3
))1
h 2
J 2
z 3
V
mgl k 0 h 2
Сделаем замену переменных —— = a , --- = p. Тогда система (6) примет вид
JJ
2/.
-
- 2^-р^1- - 3Ы * и- - I + u
-
- 3 = - 4 3
-
- - 4 a 2 z 3+P2 ( - 1 - 3 ) + Р 2 h 2 ( - 1 - 3 )
Как известно, динамика любой системы связана с ее поведением в окрестности стационарных решений [16]. В рассматриваемом случае стационарные точки определяются как решения следующей системы алгебраических уравнений:
- 2 = 0'
« 1 - 1 -Р 1 ( - 1 - - 3 ) -Р 1 h 2 ( - 1 - - 3 ) 3 + и = 0
z = 0 '
«^ +Р 2 ( - 1 - - 3 ) + Р 2 h 2 ( - 1 - - 3 ) 3 = 0
Тогда в фазовом пространстве существует три точки равновесия, из которых веществен- ные координаты имеет только одна:
z l
6r 2 h 2
-6Г 2 h 2Р2 и
2<8 а 2 Р 2 h 2 Г 1 Г 2 Г з
_ I--------
+ ^12Г з
P i : ^
z, = 0
«1^2^132 h2 ( 2^!8гЗ - 6 и г2Гз -«2Р5)-^12«1Р2Г2
z 3 6a2p 1 h 2Г32Г3
Z 4 = 0
где
Г , = а 1 а 2 -а 1 в 2 -а 2 Р 1 , Г2 = а2 Ь 1 + а , b 2 ,
Г3 = ^9а2р3h4иГ52 + ^3«6р6h6Г92 (4Г3 + 27а2h2и2Г2) .
Исследуем устойчивость этого единственного стационарного решения. Для этого применим первый метод Ляпунова [17] по линейному приближению. Линеаризуем исходную систему в окрестности стационарного решения и найдем собственные числа матрицы линеаризованной системы:
det (0-Х E ) = 0,
дF где 0 =---, z = дz будет иметь вид
( z 1 ,z 2 ,z 3 , z 4 ) . В рассматриваемом случае матрица линеаризованной системы
0 =
0 10
а -р ц + с х
c 2 Х
c»
где ц = 1 + 3 h 2 ( z
Р 2 м 0 а 2 -р 2 м
— z 3 Л Х = , "2 d Х , z , и z 3
"(1 + ( z X c )2)
С 4 Х
определяются соотношением P 1 . Характери-
стическое уравнение (8) можно переписать в следующем виде:
X4 +ч 2 X2+ Y , X + Y 4 = 0.
Подставим вычисленные ранее координаты точки P j и найдем собственные значения Х 1,2,з,4 . Во избежание громоздких выкладок дальнейшие вычисления приведем для случая, в котором: величина управления D = 10; начальная жесткость пружины к 0 = 14.5; высота крепления пружины h = 0.1; длины и массы осцилляторов l ! = 0.1, l 2 = 0.15, m ! = 0.1, m 2 = 0.2. Получим собственные значения в точке P : λ = –1.0127 + i 0.7334, λ = –1.0127 – i 0.7334, λ = –0.6582, λ = –0.2453. Поскольку все показатели Λ < 0, то при данных параметрах система асимптотически устойчива [16].
Динамика системы при значениях параметров, описанных выше, и начальных условиях: z 1 [0] = -0.001, z 2[0] = -0.001, z з [0] = 0.002, z 4[0] = -0.002, изображена на рис. 2, 3.
Как видим, стационарное решение, определяемое координатами точки P , устойчиво по Ляпунову. Исследуем зависимость устойчивости стационарного решения от параметров к 0 и D . Для этого зададим диапазоны изменения интенсивности управления D е [1;50] и параметра жесткости пружины к 0 е [1;20], а значения остальных параметров зафиксируем. Как известно из [16], стационарное решение устойчиво, если старший показатель Ляпунова отрицателен. Т.е. область устойчивости в пространстве параметров к 0 , D определяется как решение неравенства Л = Л тах ( к 0 , D ) < 0. Результаты представлены на рис. 4.
На графике рис. 4 отмечены области устойчивости системы в пространстве параметров. В областях, помеченных синим цветом, показатель Ляпунова Λ > 0 – это значит, что система неустойчива. В белых же областях, наоборот, система асимптотически устойчива.
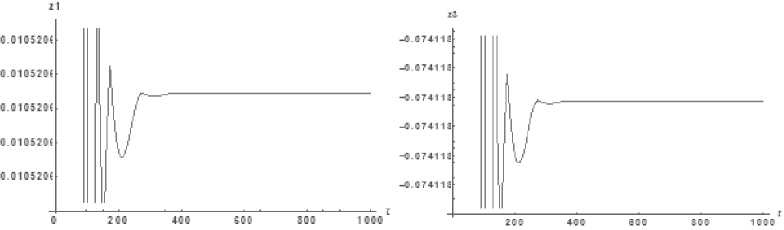
Рис. 2. Графики координат: z 1 (слева) и z 3 (справа)
Fig. 2. Velocity curves: z 1 (left) and z 3 (right)
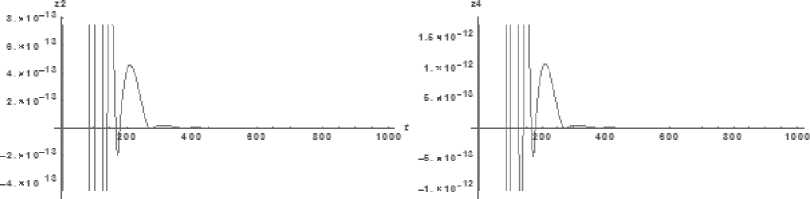
Рис. 3. Графики скоростей: z 2 (слева) и z 4 (справа)
Fig. 3. Speed graphs: z 2 (left) and z 4 (right)
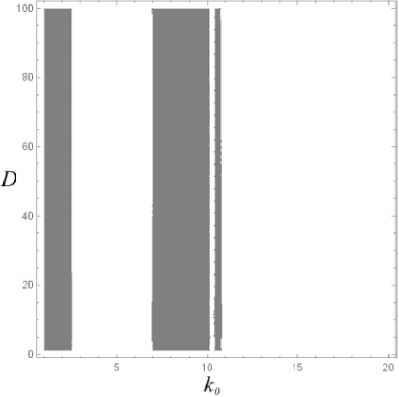
Рис. 4. Распределение значений Re[max(λ)] в зависимости от значений k 0 и D
Fig. 4. Values distribution of Re[max(λ)] in terms of values of k 0 and D
Случай управления обоими маятниками
Рассмотрим систему с нелинейной жесткостью и управлением, приложенным к обоим маятникам. Ее физическая модель представлена на рис. 5.
В данном случае в четвертом уравнении системы (4) добавится переменная управления и . Как и в предыдущем случае, имеется только одна стационарная точка:
1 ( бШа2Р1 h 2г1г2
+Vi2r3
18Г2h2^ Г z 2 = 0
а1а2р1р2 h 2 ( 3^18Г 3 - 6 и Г 2 Г3 ) -3/18а , Г3 z 3 = 18а2 h 2 Г32Г3
z 4 = 0
Матрица линеаризованной системы имеет вид
0 =
|
0 |
1 |
0 |
|
|
а 1 — Р 1 Ц + С 1 Х |
С 2 % |
Р ц + с 3 Х |
С 4 Х |
|
0 |
0 |
0 |
1 |
|
Р 2 ц + С 1 Х |
С 2 Х |
а 2 — Р 2 Ц + с з Х |
С 4 Х |
,
—2 d
где Ц = 1 + 3h (z — z3 ) , х =
, z и z определяются соотношением
„ ( 1 + („ с ? )
P 1 . Характери-
стическое уравнение эквивалентно полученному ранее
(X4 +Y1X3 + Y 2X2 +Y3X + Y4 0).
Найдем собственные значения Ху^. Во избежание громоздких выкладок, дальнейшие вычисления приведем для случая, в котором начальная жесткость пружины к 0 = 100, остальные параметры такие же, как и в предыдущем случае. Получим собственные значения: Х 1 = -0.8794 + i 10.9709, Х2 = -0.8794 - i 10.9709, Х3 = -0.5705, Х4 = -0.3231. Тогда показатели
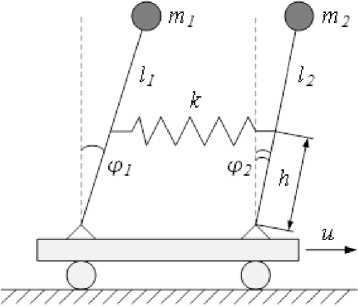
Рис. 5. Физическая модель связанных маятников
Fig. 5. Coupled pendulums physical model
Ляпунова: Λ1 = Λ2 = Reλ2 = –0.8794, Λ3 = λ3 = –0.5705, Λ4 = λ4 = –0.3231. Поскольку все показатели Λ < 0, то при данных выбранных параметрах система устойчива [16]. Результаты моделирования описанной системы представлены на рис. 6, 7.
Как видно из графиков (рис. 6-7), при моделировании с заданными начальными условиями система диссипативна. Исследуем зависимость устойчивости стационарного решения от параметров k 0 и D . Для этого зададим диапазоны изменения интенсивности управления D ∈ [1;50] и параметра жесткости пружины k 0 ∈ [1;20], а значения остальных параметров зафиксируем. Результаты даны на рис. 8.
На графике рис. 8 отмечены области устойчивости системы в пространстве параметров. В областях, помеченных синим цветом, показатель Ляпунова Λ > 0 – это значит, что система неустойчива. В белых же областях, наоборот, система устойчива.
Заключение
В результате проведенного исследования было показано, что сложная неустойчивая система, состоящая из осцилляторов с нелинейной связью, может быть описана достаточно простой системой уравнений, а ее стабилизация при соблюдении определенных условий возможна с помощью достаточно простого управления периодической функцией по обратной связи.
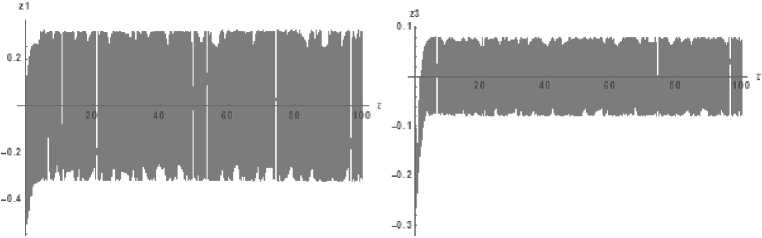
Рис. 6. Графики координат: z 1 (слева) и z 3 (справа)
Fig. 6. Coordinate graphs: z 1 (left) and z 3 (right)
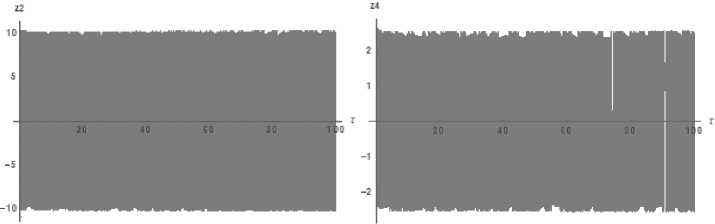
Рис. 7. Графики скоростей: z 2 (слева) и z 4 (справа)
Fig. 7. Velocity curves: z 2 (left) and z 4 (right)
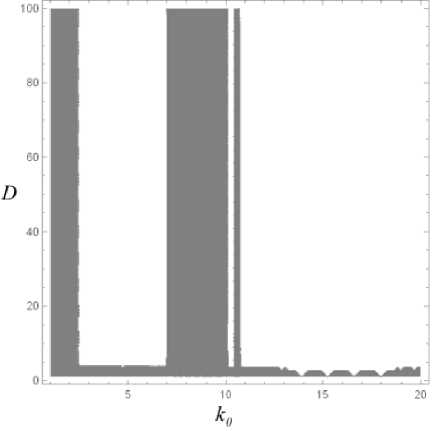
Рис. 8. Распределение значений Re[max(λ)] в зависимости от значений k 0 и D
Fig. 8. Values distribution of Re[max(λ)] in terms of values of k 0 and D
Работа выполнена при поддержке РФФИ, гранты № 17-01-00251, 16-08-00312.
Список литературы Управление системой нелинейно связанных перевернутых маятников
- Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Наука, 1981. 568 с
- Баутин Н.Н. О числе предельных циклов, появляющихся при изменении коэффициентов из состояния равновесия типа фокуса или центра, Математический сборник, 1952, 30(72), 181-196
- Трубецков Д.И., Рожнев А.Г. Линейные колебания и волны. М.: Издательство физико-математической литературы, 2001. 416 с
- Магнус К. Колебания: Введение в исследование колебательных систем. Пер. с нем. М.: Мир, 1982. 304 с
- Осипов Г.В. Синхронизация в неоднородных сетях осцилляторов. Нижний Новгород, 2014. 135 с
- Колмогоров А.Н. О сохранении условно периодических движений при малом изменении функции Гамильтона, Доклады АН СССР, 1954, 98(4), 527-530
- Бутиков Е.И. Стабилизация перевернутого маятника (60 лет маятнику Капицы), Компьютерные инструменты в образовании, 2010, 5, 39-51
- Неймарк Ю.И., Коган Н.Я., Савельев В.П. Динамические модели теории управления. М.: Наука, 1985. 400 с
- Stephenson A. «On an induced stability», Phil. Mag, 1908, 15(233)
- Капица П.Л. Маятник с вибрирующим подвесом, УФН, 1951, 44, 720
- Матвеев М.Г., Семенов М.Е., Шевлякова Д.В., Канищева О.И. Зоны устойчивости и периодические решения перевернутого маятника с гистерезисным управлением, Мехатроника, Автоматизация, Управление, 2012, 11, 814
- Семенов М.Е., Хатиф З., Решетова О.О., Демчук А.А., Мелешенко П.А. Модель динамики обратного маятника с гистерезисным управлением, Вестник Воронежского государственного университета. Серия: Физика. Математика, 2016, 4, 165-177
- Семенов М.Е., Матвеев М.Г., Лебедев Г.Н., Соловьев А.М. Стабилизация обратного гибкого маятника с гистерезисными свойствами, Мехатроника, Автоматизация, Управление, 2017, 8, 516-525
- Solovyov A.M., Semenov M.E., Meleshenko P.A., Reshetova O.O., Popov M.A., Kabulova E.G. Hysteretic nonlinearity and unbounded solutions in oscillating systems, Procedia Engineering, 2017, 201, 549-555
- Семенов М.Е., Соловьев А.М., Попов М.А. Стабилизация неустойчивых объектов: связанные осцилляторы, Труды МАИ, 2017, 93
- Кузнецов С.П. Динамический хаос. М.: Физматлит, 2006. 356 с
- Мирошник И.В. Теория автоматического управления. Нелинейные и оптимальные системы. СПб.: Питер, 2006. 272 с
