Управление тепловым режимом здания при комбинированной системе отопления

Автор: Тверской Михаил Михайлович, Румянцев Дмитрий Владимирович
Статья в выпуске: 4 т.13, 2013 года.
Бесплатный доступ
Рассмотрен принцип управления тепловым режимом здания при наличии в системе отопления радиаторного и воздушного приборов отопления. Представлен алгоритм упреждающего управления, оптимизирующий управление тепловым режимом здания в пределах скользящего горизонта прогнозирования при заданном графике изменения температуры во времени. Расчет прогноза осуществляется на основе математической модели теплового режима здания. В алгоритме упреждающего управления использован критерий оптимальности, учитывающий суммарные затраты на тепловую и электрическую энергию исходя из заданных тарифов. Проведено уточнение математической модели объекта и критерия оптимальности для системы воздушного отопления с релейным и плавным управлением воздушным вентилятором. Приведены и проанализированы результаты моделирования управления тепловым режимом здания с использованием алгоритма упреждающего управления при заданном графике изменения температуры во времени и установленными тарифами на тепловую и электрическую энергию.
Тепловой режим здания, комбинированное отопление, упреждающее управление
Короткий адрес: https://sciup.org/147154937
IDR: 147154937 | УДК: 681.513.5
Building thermal mode control with combined heating system
The way of heating control with air and radiator sources in the heating system of the building is considered in the article. Model predictive control algorithm for optimal thermal control in the building is presented. The algorithm implements thermal control over receding horizon with set temperature diagram. Computing of thermal environment prediction is based on the thermal model of the building. The energy cost function under certain boundaries is used to estimate optimal control strategy over receding horizon. The summarized cost for electrical and thermal energy under set tariffs are taken into account in the cost function over receding horizon. The mathematical thermal model of the building and cost function were defined for air heating system with progressive and relay control scheme of the fan. Modeling results of predictive control algorithm for thermal control in the building with set temperature diagram and set tariffs for electrical and thermal energy were shown and analyzed.
Текст научной статьи Управление тепловым режимом здания при комбинированной системе отопления
На практике зачастую приходится иметь дело с системами отопления, содержащими комбинацию нескольких различных приборов отопления, например, воздушного и радиаторного с жидкостным теплоносителем. Также встречаются приборы отопления, состоящие из радиатора, создающего радиационную составляющую, и воздушного вентилятора, при включении которого обеспечивается повышение конвективной составляющей прибора [1].
Из-за различных технических характеристик приборов воздушного и радиаторного отопления, эффективность их использования при заданном тепловом режиме зависит от различных параметров объекта управления, таких как? например инфильтрационные и трансмиссионные тепловые потери, от использования общеобменной вентиляции, а также от стоимости тепловой и электрической энергии [2]. Задача эффективного управления тепловым режимом здания усложняется при наличии дневного и ночного тарифов на электрическую и тепловую энергию, и заданного графика изменения температуры во времени.
В России комбинированное отопление наиболее часто применяется в выставочных залах, торговых центрах и других объектах с заданным графиком изменения температуры во времени.
В работе [3] была сформулирована задача оптимального управления тепловым режимом здания при комбинированной системе отопления в следующем виде.
Математическая модель объекта управления, которым является отапливаемое помещение, в переменных состояния имеет вид:
dTa,int dt av1Ta ,int
ТВ ТР
- a 1,2 T surf + a 1,5 Q + a 1,6 Q conv + a1,11 T a , ven ;
dT surf
= a 2,1 T a ,int
a 2,2 T surf + a 2,3 T w + a 2,7 Q rad ;
dTw dt " a3,2Tsurf
a 3,3Tw + a 3,4 T surf , ext ;
dT . , surf , ext dt
= a 4,3 T w a 4,4 T surf , ex
+ a 4,10 T a , ex t ;
Q ТВВ dt - a 5,5 Q + a 5,8u ;
ТР
Qrad ТРР
---;-- = - a 6 7 Q rad + a 6 9 u ;
dt ,,
ТР conv ТРР dt a7,6Qconv + a7,9u ;
уравнение выхода
TSU (t) = z1Ta ,int + z2Tsurf + z5 Qconv + z6 Qrad , при ограничениях:
0 < Q ТВ( t ) < Q mBx ;
0 < Q Td ( t ) + Q conv ( t ) < Q mPx ;
0 < u P( t) < u mmax;
0 < u В ( t ) < u m a x ;
T SSU ,min ( t ) < T SU ( t ) < T SU ,max ( t )•
При регулировании тепловой мощности воздушного отопления за счет изменения расхода воздуха через теплообменник (плавное управление вентилятором) и температуры жидкостного теплоносителя используется дополнительное ограничение вида
Q ( t ) = a 8 ,20 u • (4)
При регулировании тепловой мощности воздушного отопления только за счет изменения температуры жидкостного теплоносителя, подающегося в теплообменник (релейное управление вентилятором), используется дополнительное ограничение вида:
x ЭВ = 1, при u B > 0; (5)
x ЭВ = 0, при u B = 0.
В выражениях (1)–(5):
a i,j – постоянный коэффициент, соответствующий номеру строки i и столбца j матрицы коэффициентов правой части системы уравнений (1);
z j – постоянный коэффициент, с номером j , определяемый в процессе идентификации математической модели объекта управления;
переменные состояния:
Ta ,int – температура внутреннего воздуха;
Tsurf – температура внутренней поверхности ограждения;
Tw – температура слоя внутри ограждения;
Tsurf , ext – температура наружной поверхности ограждения;
TSU – результирующая температура [4];
TSSU – заданное значение результирующей температуры;
Q ТВ – конвективные теплопоступления от воздушного отопления;
Qr Т a Р d – радиационные теплопоступления от радиаторного отопления;
Qc Т o Р nv – конвективные теплопоступления от радиаторного отопления;
Q ЭВ – электрическая мощность, потребляемая вентилятором воздушного отопления;
x ЭВ - переменная состояния вентилятора воздушного отопления (при x ЭВ = 1 - вентилятор включен, при x ЭВ = 0 - отключен);
управляющие воздействия:
u Р – сигнал управления приборами радиаторного отопления;
u В – сигнал управления приборами воздушного отопления;
возмущающие воздействия:
Ta , ext – температура наружного воздуха;
Ta , ven – температура воздуха, поступающего в помещение от приточной вентиляции;
Q mТВax , Q mТРax – верхняя граница тепловой мощности для приборов воздушного и радиаторного отопления соответственно;
umВax , umРax – верхняя граница сигнала управления для приборов воздушного и радиаторного отопления соответственно;
TSSU ,min( t ), TSSU ,max( t ) – нижняя и верхняя границы для результирующей температуры.
Критерий оптимальности управления имеет вид
Jc(U,X) = J ^c?E? + ^jE? + EТВ) о L *=1 j=i dt ^ min,
где ciЭ , cТj – стоимостные коэффициенты для соответствующего тарифа электрической и тепло- вой энергии соответственно; EiЭВ – количество электрической энергии, потребленное по i-му тарифу воздушным отоплением; EТj Р , EТj В – количество тепловой энергии, потребленное по j-му тарифу радиаторным и воздушным отоплением соответственно; l1, l2 – количество различных тарифов, действующих в течении цикла работы системы отопления по заданному графику (за 24 часа) для электрической и тепловой энергии соответственно.
Постановка задачи упреждающего управления
Решение задачи оптимального управления в виде (1)–(6) вызывает значительные трудности из-за большой размерности и наличия ограничений [5–9]. Кроме того, решением задачи (1)–(6) являются функции изменения управляющих воздействий на всем временном интервале (за 24 часа), что приводит к значительным ошибкам при возникновении неучтенных возмущающих воздействий. В связи с этим практическое применение алгоритмов оптимального управления, полученных в результате непосредственного решения приведенной задачи, весьма затруднительно и может оказаться неэффективным.
Для решения задач такого вида на практике используются алгоритмы упреждающего управления [10–16]. Целью упреждающего управления является поиск оптимальных управляющих воздействий на заданном скользящем горизонте прогнозирования. Пусть X ( t ) – вектор переменных состояния, а U ( t ) – вектор управляющих воздействий, входящих в систему уравнений (1). Задачу упреждающего управления можно записать в следующем виде.
Требуется найти векторы управляющих воздействий для настоящего и последующих моментов времени с заданным шагом ( d = t ^ + 1 - tk ) и для заданного количества шагов N :
U ( t k ), U ( t k + 1 ),..., U ( t k + N ), (7)
которые обеспечивают минимум для целевой функции:
C(U,X) = f ЛТX(tk+J) + £ Л\U(tk+J-1) ^ min,(8)
j=1
где Λ 1 , Λ 2 – матрицы коэффициентов; N – горизонт прогнозирования.
Пусть для управляющих воздействий и переменных состояния заданы ограничения вида:
/ о < U i ( t k + J - 1 ) < u m ax;
>< Xi (tk+j ) < хГ,
J = 1... N, где xi, ui – элементы векторов X и U соответственно.
Система уравнений в дискретном виде, описывающая объект управления:
' X ( t k + 1) = A T X ( t k ) + B T U ( t k );
‘ X ( t k + j ) = A T X ( t k + j - 1 ) + B T U ( t k + j - 1 );
X( tk+N ) = A T X( tk+N-1) + B T U( tk+N-1), где A, B – матрицы коэффициентов.
Поиск минимума целевой функции (8) осуществляется для временного интервала, который задается скользящим горизонтом прогнозирования N . При поиске минимума учитываются ограничения, наложенные на переменные состояния и управляющие воздействия. Результатом решения являются векторы управляющих воздействий U ( t k ), U ( t k + 1),..., U ( t k + N | ). Прогнозируемые значения переменных состояния X ( t k + 1), X ( t k + 2),..., X ( t k + N ) определяются исходя из рассчитанных значений управляющих воздействий. Вектор начальных значений переменных состояния X ( tk ) является известным и может включать в себя реальные значения переменных в текущий момент времени [10, 17].
Одним из наиболее эффективных методов поиска решения при упреждающем управлении является метод линейного программирования [10, 11, 13, 14, 17].
В общем виде задачу линейного программирования можно представить следующим образом.
F ( U , X ) = X 0 + Л X + A T U ^ min; (11)
'c t X < C o ;
D T U < D o ;
A т X + B T U = E 0, (13) где Λ 1 , Λ 2 , C , D , A , B – матрицы коэффициентов; C 0 , D 0 , E 0 – матрицы свободных членов; X 0 - свободный член.
x i j > 0, u i j > 0 - обязательные условия для использования метода линейного программирования.
При решении задачи линейного программирования осуществляется переход от одной вершины допустимой области к другой, причем к такой, при которой значение целевой функции меньше (при задаче на минимум) [18, 17]. Оптимальная точка будет находиться на границе области допустимых значений заданной ограничениями (12) и удовлетворять выражению (13).
Для использования метода линейного программирования при решении поставленной задачи, необходимо привести выражения (11)–(13) к каноническому виду. Для этого нужно преобразовать ограничения, заданные в виде неравенств (12), в равенства. Это достигается путем добавления дополнительной переменной по следующему правилу. Если переменная добавляется в ту часть неравенства, которая расположена с меньшей стороны знака неравенства, то переменная записывается со знаком плюс. В результате система (12) примет вид
'T X + X ' = C o ;
DTU + U' = D0, где X', U' – векторы дополнительных переменных.
Приведем задачу (8)–(10) к виду, в котором ее можно решить с помощью метода линейного программирования.
Выражение (8) является целевой функцией в задаче упреждающего управления и имеет линейный вид. Уравнения, описывающие объект управления в задаче упреждающего управления (10), имеют вид аналогичный уравнению (13) задачи линейного программирования. Условие положительности из неравенства (9) обеспечивается из условия о положительности переменных при использовании метода линейного программирования. Верхние ограничения неравенств (9) приведем к каноническому виду путем добавления к левой части неравенств дополнительных переменных X ' , U ' . В результате, задача упреждающего управления примет вид:
NN
C (U,X) = £ ЛТ X( tk+J) + £ Л^( tk+J-1) ^ min;(15)
j=1
'0 — u i , j ( t k + J - 1 ) + u’ J = u max ;
0 — xi, j (tk+J ) + xi, j = xmax,
J = 1... N .
' X ( t k + 1 ) = A T X ( t k ) + B T U ( t k );
‘ X ( t k + j ) = A T X ( t k + j - 1 ) + B T U ( t k + j - 1 ); (17)
;
X ( t k + N ) = A T X ( t k + N - 1 ) + B T U ( t k + N - 1 ).
Запись задачи (15)–(17) схожа с задачей линейного программирования (11), (14), (13). Отличие заключается в размерности. Поскольку задача (15)–(17) является динамической, то соответствующие ограничения записываются для каждого временного шага в пределах горизонта прогнозирования. А в целевую функцию входят переменные не только для текущего момента времени, но и для прогнозируемых шагов.
Таким образом, физический смысл решения задачи упреждающего управления методом линейного программирования заключается в переборе вершин области допустимых ограничений до тех пор, пока целевая функция не примет минимальное значение. Найденной вершине будут соответствовать оптимальные значения управляющих воздействий U ( t k ), U ( t k + 1),..., U ( t k + N - 1 ), в пределах заданного горизонта прогнозирования N и соответствующие им прогнозируемые переменные состояния X ( t k + 1), X ( t k + 2),..., X ( t k + N ). При этом для управления используется только ближайшее значение управляющего воздействия U ( tk ) . При переходе на следующий шаг задача упреждающего управления формулируется и решается заново, учитывая новые начальные значения переменных состояния, и новые ограничения для шага k + N [11, 17].
Величина шага d = t k + 1 - t k и горизонт прогнозирования N выбираются, как правило, опытным путем исходя из следующих соображений. Чем меньше значение шага d , тем меньше ошибка дискретизации модели объекта управления. Однако, чем больше количество шагов, для которых осуществляется прогноз, или другими словами, чем больше значение горизонта прогнозирования N , тем выше объем вычислений для поиска оптимального решения. С другой стороны, чрезмерное уменьшение горизонта прогнозирования сокращает временной интервал, в пределах которого осуществляется поиск оптимума, и может привести к запоздалой реакции системы управления на новые ограничения для шага t k + N . Из вышесказанного следует, что выбор значений шага d и горизонта N зависит от таких параметров объекта, как быстродействие наименее инерционного звена объекта управления и располагаемой тепловой мощности приборов отопления.
Для использования метода линейного программирования при решении задачи упреждающего управления тепловым режимом здания необходимо преобразовать дифференциальные уравнения системы (1) в разностные и привести ограничения в виде неравенств (3) к каноническому виду. После преобразований получим выражения в следующем виде.
Математическая модель в дискретном виде:
T a M ( k + n ) = в 1 - [ M M ( k + n - 1) - a‘ 2 T surf ( k + n - 1) -
-
- a 1,5 Q ТВ ( k + n - 1) - a 1,6 Q COmv ( k + n - 1) + a'1,18Ta , ven ( k + n - 1)];
T surf ( k + n) = в 2 - [ - a 2, T M ( k + n — 1) + a 2,2 T surf ( k + n - 1) -
-
- a23 T W ( k + n - 1) - a 2,7 Qrad ( k + n - 1)];
T w ( k + n ) = в з - [ - a 3,2 T surf ( k + n - 1) + o^T , ( k + n - 1) -
<" a 3,4 T surf , ext ( k + n - 1)]; (18)
T surf , ext ( k + n ) = в 4 - [ - a^ ( k + n - 1) + a 4,4 T surf , ex ( k + n - 1) -
-
- a 4,17 T a , ext ( k + n - 1)];
Q ТВ ( k + n ) = в 5 - [ a 5,5 Q ТВ ( k + n - 1) - a 5,20 u B( k + n - 1)];
q T p ( k + n ) = вб - [ a 6,6 Q rad ( k + n - 1) - a 6,19 u Р ( k + n - 1)];
QCOnv (k + n) = в7 - [a7,7QOiv (k + n - 1) - a7,19uР (k + n - 1)], где k - номер шага; n = 1^N, N - горизонт прогнозирования; в1 = в2 = вi = в7 = 0 - свободные члены соответствующих уравнений системы; ai j - постоянные коэффициенты, полученные в результате численного решения исходной системы дифференциальных уравнений. Для определения коэффициентов a’ j можно воспользоваться итеративным методом приближенного вычисления Рунге –Кутты четвертого порядка, обеспечивающим достаточно высокую точность и не требующим сложных вычислений [19]; i, j – номер строки и столбца матрицы коэффициентов правой части системы уравнений.
Уравнение выхода в дискретном виде:
T su ( k + n ) = zT a ,int ( k + n ) + z 2 T surf ( k + n ) + z 5 Q^ nv ( k + n ) + z 6 Q ^ d ( k + n ). (19)
Ограничения в каноническом виде:
x 1 ( k + n ) = в9 - a 9 , 5 Q ТВ( k + n );
x з( k + n ) = en- [ a 11,6 Q^ d ( k + n ) + a 11,7 Q COnv ( k + n )];
x 5 ( k + n ) = в 12 - [ a 12,1 T a M ( k + n ) + a 12,2 T surf ( k + n ) + a 12 , 6 Q^ ( k + n ) +
/a 12,7 Q COPnv ( k + n )];
x 4 ( k + n ) = - в 1з + [ a 13,1 T a M ( k + n ) + a 13,2 T surf ( k + n ) + a 13,6 Q ^ d ( k + n ) +
+ a 13,7 Q Conv ( k + n )];
x 6 ( k + n ) = в14 - a 14 , 19 u p( k + n );
x 7( k + n ) = в15 - a 15 20 u B( k + n ). ,
При плавном управлении вентилятором:
Q ЭВ( k + 1) = a 8 ,20 u B( k + 1).
При релейном управлении вентилятором: x ЭВ ( k + n ) = P 16 - [ - a 16,20 u B ( k + n ) - x 8 ] ;
xЭВ e{0,1} , где в9 = ОВ; Ри = Qmpx; Р12 = tSukmm; P13 = tSukmm, n = 1-n;
в14 = u rnax ; в15 = u rnax ; a 9,5 = a 11,6 = a 11,7 = a 14,19 = a 15,20 = 1;
a 12,1 = a 13,1 = z1 ; a 12,2 = a 13,2 = z 2 ; a 12,5 = a 13,5 = z 5 ; a 12,6 = a 13,6 = z 6 •
Критерий оптимальности управления (6) может быть также записан в дискретном виде. При достаточно малой величине шага дискретизации можно принять, что величина потребляемой энергии является константой в пределах шага. Тогда, энергию E в пределах шага d можно выразить через мощность Q следующим образом: E = Q • d . Запишем критерий (6) в дискретном виде:
NN
J c ( U ( tk ) ,X ( tk )) = £ [£ n Q ЭВ( k + n ) d ] + E£ n ( Q T d ( k + n ) + n = 1 n = 1
+ ocL ( k + n ) ) d + Q ТВ ( k + n ) d ^ min,
где d = t k + 1 - t k - величина шага дискретизации; с Э + n , с Т + n - стоимостные коэффициенты для электрической и тепловой энергии на соответствующем шаге.
Поскольку величина d в выражении критерия оптимальности входит в каждое слагаемое и является константой, то ее значение не влияет на результат решения задачи. Перепишем выражение критерия оптимальности без учета d для случаев с плавным и релейным управлением венти- лятором воздушного отопления.
При плавном управлении вентилятором воздушного отопления:
N
C E ( k ) = Y o + Е YЭ + nQ ( k + n ) + Y k + n ( Q Td ( k + n ) + Qconv ( k + n ) + Q ( k + n ) ) ]^ min , (24)
n = 1
где y0 = 0 - свободный член; у Э + n = c Э( k + n ); у Т + n = c T( k + n ).
При релейном управлении вентилятором воздушного отопления:
N Э Э Т ТР ТР ce (k) = Yo + E YЭ+ nxЭ(k + n)+ YТ+n (Qrld (k + n)+ QCOnv (k + n)+ n =1
+
^ min,
где Yo = 0 - свободный член; y Э + n = c Э( k + n ) Q ЭВ; y Т + n = c T( k + n ).
Таким образом, (18)–(20), (21), (24) представляют собой задачу линейного программирования, которая решается с помощью широко известного симплекс-метода.
Выражения (18)–(20), (22), (25) представляют собой частично целочисленную задачу линейного программирования, которая может быть решена с помощью симплекс-метода и метода отсечения (Гомори).
Алгоритмы решения задач линейного программирования без условий частичной целочисленности подробно рассмотрены в [18], а для частично целочисленных задач – в [20].
Моделирование работы системы упреждающего управления
Моделирование работы системы упреждающего управления проводилось в среде моделирования Simulink v7.5 программы MatLab v7.10.0. В качестве исходной модели объекта использовалась система дифференциальных уравнений (1).
В таблице приведены основные характеристики объекта управления, используемые в качестве исходных данных для моделирования.
Температура наружного воздуха T a,ext в процессе моделирования меняется по синусоидальному закону с периодом 24 часа, начальным значением (в момент времени t =0 часов) +5 °С и пределами изменения от +5 до –15 °С.
Для расчета приведенной энергии будем использовать следующую зависимость:
E n ( t ) = E ТВ ( t ) + 4( t^ E ЭВ ( t ) + E ТР ( t ). (26)
с Т( t k )
Исходные данные для моделирования
|
№ |
Наименование |
Значение |
Ед. изм. |
|
1 |
Площадь ограждающих поверхностей |
120 |
м 2 |
|
2 |
Объем помещения |
300 |
м 3 |
|
3 |
Постоянная времени для радиатора отопления |
0,85 |
ч |
|
4 |
Постоянная времени для прибора воздушного отопления |
0,2 |
ч |
|
5 |
Тепловая мощность радиаторного отопления |
4000 |
Вт |
|
6 |
Тепловая мощность воздушного отопления |
4000 |
Вт |
|
7 |
Электрическая мощность вентилятора воздушного отопления |
80 |
Вт |
|
8 |
Величина шага дискретизации |
800 |
с |
|
9 |
Горизонт прогнозирования |
5 |
шаг |
Проведем моделирование работы системы управления при заданном графике изменения результирующей температуры и плавном управлении вентилятором воздушного отопления. Пусть стоимость электрической энергии превышает стоимость тепловой энергии в 2 раза в дежурном режиме и в 4 раза в рабочем режиме. Момент времени начала и окончания рабочего режима обозначим как t 1 и t 2 соответственно (рис. 1–3).
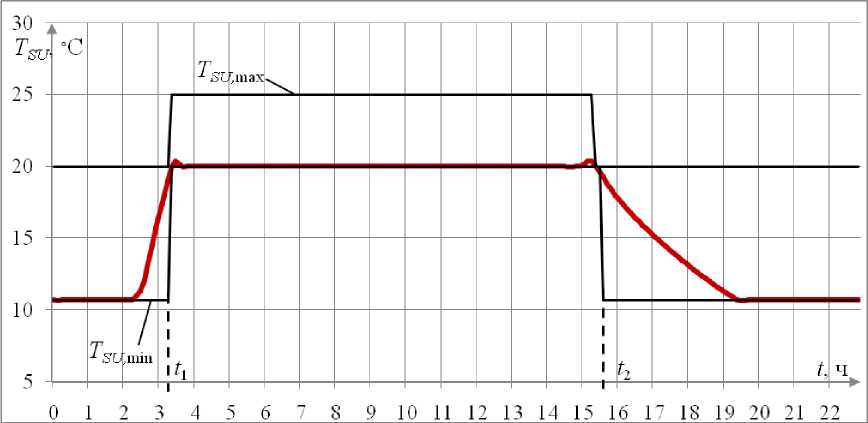
Рис. 1. График изменения результирующей температуры: T SU ,max , T SU ,min – верхнее и нижнее ограничение результирующей температуры соответственно

Рис. 2. График изменения управляющих воздействий: u Р, u В – управляющие воздействия для радиаторного и воздушного приборов отопления соответственно

Из рис. 2 видно, что в дежурном режиме для поддержания результирующей температуры используется воздушное отопление, поскольку радиаторное отопление требует большего количества приведенной энергии. Это связано с более высокой температурой внутренней поверхности стены помещения, чем при воздушном отоплении вследствие лучистой составляющей. Поскольку при радиаторном отоплении температура внутренних поверхностей ограждающих конструкций повышается, то в результате увеличения перепада температур между наружной и внутренней поверхностями стены возрастают и трансмиссионные теплопотери. Данный эффект наблюдается более выражено при сравнении воздушного и лучистого отопления [2]. При этом количество и стоимость электроэнергии, потребляемой вентилятором воздушного отопления, незначительны по отношению к стоимости и величине трансмиссионных теплопотерь при радиаторном отоплении. В процессе перехода из дежурного режима в рабочий используются одновременно радиаторное и воздушное отопление, что обеспечивает минимальное потребление приведенной энергии за счет интенсивного прогрева. В рабочем режиме стоимость электрической энергии относительно высока и поэтому в этом режиме используется радиаторное отопление.
Заключение
Задача упреждающего управления тепловым режимом здания при использовании комбинированного отопления была решена для двух типов систем воздушного отопления: при регулировании тепловой мощности за счет изменения расхода воздуха и температуры жидкостного теплоносителя воздушного отопления, и при регулировании тепловой мощности только за счет изменения температуры жидкостного теплоносителя, подаваемого в теплообменник системы воздушного отопления.
Приведены результаты моделирования работы системы управления. Полученные графики изменения результирующей температуры, управляющих воздействий и приведенной энергии поддаются аналитическому обоснованию, что показывает работоспособность разработанного алгоритма.
Список литературы Управление тепловым режимом здания при комбинированной системе отопления
- Табунщиков Ю.А. Экспериментальное исследование оптимального управления расходом энергии/Ю.А. Табунщиков, М.М. Бродач//АВОК. -2006. -№ 1. -С. 32-36.
- Малявина Е.Г. Тепловая нагрузка на системы лучистого отопления. Сравнительный анализ/Е.Г. Малявина//АВОК. -2009. -№ 7. -С. 48-58.
- Тверской М.М. Постановка задачи оптимального управления тепловым режимом здания при комбинированной системе отопления/М.М. Тверской, Д. В. Румянцев//Вестник Южно-Урал. гос. ун-та. Сер. «Компьютерные технологии, управление, радиоэлектроника». -2012. -Вып. 16, № 23 (282). -С. 16-20.
- ГОСТ 30494-96 Здания жилые и общественные. Параметры микроклимата в помещениях. -М.: Госстрой России, ГУЦПП, 1999. -7 с.
- Пупков К.А. Методы классической и современной теории автоматического управления: учеб. В 5 т. Т. 1: Теория оптимизации систем автоматического управления/под ред. К.А. Пупкова и Н.Д. Егупова. -М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. -744 с.
- Васильев Ф.П. Методы оптимизации/Ф.П. Васильев. -М.: Изд-во «Факториал Пресс», 2002. -824 с.
- Пантелеев А.В. Методы оптимизации в примерах и задачах: учеб. пособие/А.В. Пантелеев, Т.А. Летова. -М.: Высш. шк., 2005. -544 с.
- Галеев Э.М. Оптимизация: теория, примеры, задачи/Э.М. Галеев, В.М. Тихомиров. -М.: Эдиториал УРСС, 2000. -320 с.
- Сейдж Э.П. Оптимальное управление системами/Э.П. Сейдж, Ч.С. Уайт. -М.: Радио и связь, 1982. -392 с.
- Hazyuk I. Optimal temperature control of intermittently heated buildings using model predictive control: Part II -Control algorithm/1. Hazyuk, C. Ghiaus, D. Penhouet//Building and Environment. -2011. -No. 51. -P. 388-394.
- Experimental analysis of model predictive control for an energy efficient building heating system/J. Siroky, F. Oldewurtel, J. Cigler et al.//Applied Energy. -2011. -No. 88. -P. 3079-3087.
- Model predictive control of a building heating system: The first experience/S. Privara, J. Siroky, L. Ferkl et al.//Energy and Buildings. -2010. -No. 43. -P. 564-572.
- Use of model predictive control and weather forecasts for energy efficient building climate control/F. Oldewurtel, A. Parisio, C.N. Jones et al.//Energy and Buildings. -2011. -No. 45. -P. 15-27.
- Saffer D.R. Analysis of linear programming in model predictive control/D.R. Saffer, F.J. Doyle//Computers & Chemical Engineering. -2004. -No. 28. -P. 2749-2763.
- Privara S. Building modeling: Selection of the most appropriate model for predictive control/S. Privara, Z. Vana, E. Zacekova//Energy and Buildings. -2012. -No. 55. -P. 341-350.
- Qin J.S. A survey of industrial model predictive control technology/J.S. Qin, T.A. Badgwell//Control Engineering Practice. -2003. -No. 11. -P. 733-764.
- Borrelli F. Predictive Control for linear and hybrid systems/F. Borrelli, A. Bemporad, M. Morari. -2013. -404 c. -http://www.mpc.berkeley.edu/mpc-course-material/BBMbook_ Cambridge_newstyle.pdf?attredirects=0&d=1 (дата обращения: 25.06.2013).
- Методы математического программирования в задачах оптимизации сложных технических систем: учеб. пособие/А.М. Загребаев, Н.А. Крицына, Ю.П. Кулябичев и др. -М.: МИФИ, 2007. -332 с.
- Камке Э. Справочник по обыкновенным дифференциальным уравнениям/Э. Камке. -М.: Наука, 1971. -576 с.
- Акулич И.Л. Математическое программирование в примерах и задачах/И.Л. Акулич. -М.: Высш. шк., 1986. -319 с.
