Управляемая вибрация звеньев подвижности производственного механизма

Автор: Карнаухов Николай Федорович, Филимонов Максим Николаевич, Мироненко Роман Сергеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 (90) т.17, 2017 года.
Бесплатный доступ
Введение. Предметом настоящей работы является исследование характеристик трения движущихся поверхностей звеньев производственных механизмов (ПМ), включая исполнительные механизмы (ИМ), рабочие органы (РО) технологических машин (ТМ) в зоне малой частоты вращения асинхронного двигателя (АД), питаемого от автономного инвертора напряжения (АИН) в системе «АИН - АД». Цель исследования - поиск технического решения по снижению влияния трения в звеньях ПМ на механические характеристики частотно-управляемого электропривода (ЧУЭП) в зоне малой и ползучей скорости, а также подтверждение целесообразности введения нормируемой вибрации подвижных звеньев в направляющих ПМ при реализации пускотормозных режимов работы АД. Материалы и методы. Для решения поставленных исследовательских задач применен принцип двухрежимного управления АИН, обеспечивающего формирование квазисинусоидального напряжения для питания АД в системе «АИН - АД» с коэффициентами гармоник Kuu > 8%. Использовано программное регулирование амплитуд основной, 5-й и 7-й гармоник тока статора, формирующих пульсирующие моменты на валу АД и вызывающих нормируемую вибрацию звеньев ПМ. Результаты исследования. Получено обоснование и экспериментальное подтверждение возможности управления АИН, обеспечивающее программное изменение амплитуды вибрации вала АД и уменьшение эффективного коэффициента трения движущихся звеньев ПМ с целью исключения схватывания звеньев в условиях эксплуатации ПМ. Такой эффект возможен при вращении ротора АД в зоне низких частот тока (0,5-20 Гц), что характерно для движения ПМ с малой скоростью в процессе реализации пускотормозных режимов работы ЧУЭП. Обсуждение и заключения. Область применения разработанного технического решения охватывает многие ПМ с ЧУЭП, для которых повторно-кратковременные режимы работы (с ПВ 40 % и более) являются основными. Таким образом, использование эффекта вибрационной линеаризации коэффициента трения в звеньях ПМ позволяет уменьшить напряжение трогания АД и существенно расширить диапазон регулирования скорости ЧУЭП, повысить плавность движения и улучшить кинематику выходного звена ПМ, на котором установлен рабочий орган (РО).
Частотно-управляемый электропривод, двухрежимный автономный инвертор напряжения, коэффициент гармоник тока, напряжение трогания ад, сила трения покоя и движения, эффективный коэффициент сухого трения, колебания звеньев механической системы
Короткий адрес: https://sciup.org/14250302
IDR: 14250302 | УДК: 62-83: | DOI: 10.23947/1992-5980-2017-17-3-78-88
Controllable vibration of mobility links of production mechanism
Introduction. The work subject is investigating friction characteristics of the moving surfaces of the production mechanism (PM) links including executive mechanisms (EM), and work tools (WT) of technological machines (TM) in the low-speed zone of an asynchronous motor (AM) powered from an autonomous voltage inverter (AVI) in the “AVI - AM” system. The work objective is to find a technical solution to the reduction of the friction effect in the PM links on the frequency-controlled drive (FCD) mechanical characteristics in the low- and creep-speed zone, and also, to the validation of the rated vibration feasibility of the mobile links in the PM guides under the starting-braking AM modes. Materials and Methods. To solve the research problems, the concept of bimodal AVI control that provides the formation of quasi-sinusoidal voltage for AM power supply in the “AVI - AM” system with the harmonic coefficients Kuu > 8% is used. The program control of the amplitudes of the fundamental 5th and 7th harmonics of the stator current is applied. These harmonics form the fluctuating torques on the AM shaft and cause the normalized vibration of the PM links. Research Results. The justification and experimental proof of the AVI control feasibility providing a project change in the AM shaft vibration amplitude and a decrease in the effective friction coefficient of the PM moving links aiming at the elimination of the seizure of the links under the PM operation conditions are obtained. Such an effect is possible under the AM rotor spinning in the low current frequency (0.5-20 Hz) zone which is typical for the slow-speed motion of PM under the starting-braking FCD modes. Discussion and Conclusions. The application domain of the developed technical solution covers many PMs with FCD for which the short-time operation modes (with CY of 40% and more) are considered basic. Thus, the use of the effect of vibration linearization of the friction coefficient in the PM links allows the following: to reduce the AM breakaway voltage and significantly extend the FCD speed control range, to increase the ride quality and improve the PM out put link kinematics on which the WT is fixed.
Текст научной статьи Управляемая вибрация звеньев подвижности производственного механизма
1, 2, 3 Don State Technical University, Rostov-on-Don, Russian Federation
Введение. Предметом настоящей работы является исследование характеристик трения движущихся поверхностей звеньев производственных механизмов (ПМ), включая исполнительные механизмы (ИМ), рабочие органы (РО) технологических машин (ТМ) в зоне малой частоты вращения асинхронного двигателя (АД), питаемого от автономного инвертора напряжения (АИН) в системе «АИН — АД». Цель исследования — поиск технического решения по снижению влияния трения в звеньях ПМ на механические характеристики частотноуправляемого электропривода (ЧУЭП) в зоне малой и ползучей скорости, а также подтверждение целесообразности введения нормируемой вибрации подвижных звеньев в направляющих ПМ при реализации пускотормозных режимов работы АД.
Материалы и методы. Для решения поставленных исследовательских задач применен принцип двухрежимного управления АИН, обеспечивающего формирование квазисинусои-дального напряжения для питания АД в системе «АИН — АД» с коэффициентами гармоник K u < 8% и K u > 8%. Использовано программное регулирование амплитуд основной, 5-й и 7-й гармоник тока статора, формирующих пульсирующие моменты на валу АД и вызывающих нормируемую вибрацию звеньев ПМ.
Результаты исследования . Получено обоснование и экспериментальное подтверждение возможности управления АИН, обеспечивающее программное изменение амплитуды вибрации вала АД и уменьшение эффективного коэффициента трения движущихся звеньев ПМ с целью исключения схватывания звеньев в условиях эксплуатации ПМ. Такой эффект возможен при вращении ротора АД в зоне низких частот тока (0,5–20 Гц), что характерно для движения ПМ с малой скоростью в процессе реализации пускотормозных режимов работы ЧУЭП.
Обсуждение и заключения. Область применения разработанного технического решения охватывает многие ПМ с ЧУЭП, для которых повторно-кратковременные режимы работы (с ПВ 40 % и более) являются основными. Таким образом, использование эффекта вибрационной линеаризации коэффициента трения в звеньях ПМ позволяет уменьшить напряжение трогания АД и существенно расширить диапазон регулирова-
Introduction. The work subject is investigating friction characteristics of the moving surfaces of the production mechanism (PM) links including executive mechanisms (EM), and work tools (WT) of technological machines (TM) in the low-speed zone of an asynchronous motor (AM) powered from an autonomous voltage inverter (AVI) in the “AVI – AM” system. The work objective is to find a technical solution to the reduction of the friction effect in the PM links on the frequency-controlled drive (FCD) mechanical characteristics in the low- and creep-speed zone, and also, to the validation of the rated vibration feasibility of the mobile links in the PM guides under the starting-braking AM modes.
Materials and Methods. To solve the research problems, the concept of bimodal AVI control that provides the formation of quasi-sinusoidal voltage for AM power supply in the “AVI – AM” system with the harmonic coefficients Ku < 8% and Ku > 8% is used. The program control of the amplitudes of the fundamental 5th and 7th harmonics of the stator current is applied. These harmonics form the fluctuating torques on the AM shaft and cause the normalized vibration of the PM links.
Research Results. The justification and experimental proof of the AVI control feasibility providing a project change in the AM shaft vibration amplitude and a decrease in the effective friction coefficient of the PM moving links aiming at the elimination of the seizure of the links under the PM operation conditions are obtained. Such an effect is possible under the AM rotor spinning in the low current frequency (0.5-20 Hz) zone which is typical for the slow-speed motion of PM under the starting-braking FCD modes.
Discussion and Conclusions. The application domain of the developed technical solution covers many PMs with FCD for which the short-time operation modes (with CY of 40% and more) are considered basic. Thus, the use of the effect of vibration linearization of the friction coefficient in the PM links allows the following: to reduce the AM breakaway voltage and significantly extend the
*
**
ния скорости ЧУЭП, повысить плавность движения и улуч- FCD speed control range, to increase the ride quality and improve шить кинематику выходного звена ПМ, на котором установ- the PM out put link kinematics on which the WT is fixed.
лен рабочий орган (РО).
колебания звеньев механической системы.
Образец для цитирования: Карнаухов, Н. Ф. Управляемая For citation: N.F. Karnaukhov, M.N. Filimonov, R.S. Mironenko. вибрация звеньев подвижности производственного механизма Controllable vibration of mobility links of production mechanism..
/ Н. Ф. Карнаухов, М. Н. Филимонов, Р. С. Мироненко // Vestnik of DSTU, 2017, vol. 17, no.3, pp. 78–88.
Вестник Дон. гос. техн. ун-та. — 2017. — Т.17, № 3. — С. 78– 88.
Введение. При проектировании производственных механизмов (ПМ) особое значение придается выбору (созданию) электропривода (ЭП), обеспечивающего энергосберегающие режимы работы элементов силового канала и необходимые механические характеристики, количественные значения которых обычно выражаются параметрами траектории, скоростями, ускорениями и силами (моментами сил) [1], действующими при работе ПМ. Расчетная модель ЭП ПМ с жесткими звеньями и направляющими движения приведена на рис. 1.
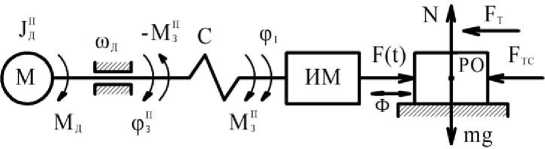
Рис. 1. Расчетная модель электропривода производственного механизма с жесткими звеньями и направляющими движения:
J П – приведенный момент инерции передаточного механизма и двигателя; М Д – момент двигателя; ωд – скорость вращения ротора асинхронного двигателя (АД); С – жесткость соединения механизма; M П – движущий момент на входе ИМ на валу АД; - M П – момент сопротивления на валу АД; φ 1 – угол поворота входного звена ИМ; F ( t ) – суммарная движущая сила; F т – сила трения в направляющих; F тс – сила технологического сопротивления; N – сила нормального давления массы m рабочего органа (РО)
Fig. 1. Design model of electric drive of production mechanism with rigid links and motion guides: J П –reduced moment of inertia of transfer device and motor; М Д – motor torque; ωд – asynchronous motor (AM) rotor speed; C – rigidity of the mechanism connection; M П – driving moment at EM input on AM shaft; - M П – torque on AM shaft; φ 1 – roll angle of EM input unit; F(t) – total driving force;
F т –frictional force in guides; F тс – process drag force; N – normal pressure force of work tool (WT) mass m
Как известно [2, 3, 4], к ПМ с позиционным ЭП постоянного, переменного тока обычно предъявляются повышенные требования (в частности, к равномерности движения исполнительного механизма (ИМ) и точности позиционирования РО). Это обусловлено особенностями формирования механических характеристик исполнительного двигателя (М) в зоне малой и ползучей скорости c учетом влияния сил сухого трения в подвижных звеньях.
В этом случае применение частотно-управляемого электропривода (ЧУЭП) на базе АД, собранного по системе «АИН—АД», сопряжено с дополнительными трудностями. Они вызваны появлением на валу АД пульсирующих моментов [5], обусловленных гармоническими составляющими тока статора (при частотах 0,5–20 Гц и коэффициенте гармоник K u > 8 %). В результате их воздействия возникают значительные биения ведущего вала, неравномерность вращения и формируется линейная скорость ( v ) движения РО. Такие режимы работы характерны для подавляющего большинства технологического оборудования (ТО): станочных и робототехнических систем РТС — с малой зоной перемещения ИМ, РО, например, захватного устройства (ЗУ) промышленного робота (ПР) [6].
Наличие пульсирующих моментов на валу АД в совокупности с моментом сухого трения в звеньях подвижности ПМ затрудняет реализацию программируемых законов управления движением выходного звена, что снижает качество выполнения технологического процесса, точность останова РО. Как показывают теоретические и экспериментальные исследования, результирующие динамические и статические характеристики ЧУЭП в значительной степени зависят от случайных значений сухого трения в механических звеньях ПМ. Особенно это проявляется в зоне малых частот вращения АД. Естественно, проблемы повышения равномерности движения, точности позиционирования РО и снижения потерь в зоне контакта (трущихся звеньев в направляющих ПМ и звена подвижности при малой скорости их перемещения) являются достаточно сложными задачами в создании особого класса машин-автоматов —
Машиностроение и машиноведение
промышленных роботов (ПР). Соответствующие технические решения, по мнению авторов, позволят улучшить технические характеристики ЧУЭП и расширить сферу применения ПМ с приемлемыми механическими характеристиками АД в зоне малой и ползучей скорости, а также в зоне малых перемещений РО.
Цель исследования — показать целесообразность использования двухрежимного управления АИН в ЧУЭП ПМ, проектируемых по системе «АИН—АД», и возможность полезного применения 5-й и 7-й гармоник тока статора АД для улучшения динамики движения ПМ в зоне малой скорости. Программное регулирование гармоник по амплитуде, фазе для формирования приемлемой вибрации ротора при пускотормозных режимах работы АД позволит обеспечить желаемое изменение влияния коэффициента трения в контактирующих поверхностях направляющих и звена подвижности в планируемой зоне перемещения и останова ПМ (в соответствии с параметрами технологического процесса).
Решение задачи. Решение поставленной задачи авторы видят в двухрежимном управлении АИН [6], обеспечивающем формирование синусоидального ( K u < 5-8%) и квазисинусоидального ( K u > 8%) напряжения [7, 8, 9]. Это позволит программно формировать управляемые по амплитуде вращающие моменты (без пульсаций и с нормируемыми пульсациями) на валу АД — например, в процессе пуска — торможения ЧУЭП.
Известно [5], что при питании АД от АИН с несинусоидальным выходным напряжением последний можно разложить на основную составляющую и ряд высших гармоник. При этом основная составляющая тока статора формирует вращающий момент АД, а высшие гармоники создают пульсирующие моменты, определяемые из выражения [10]:
M k =
Pm l I 2 2 п kf 2 k
r 2 k sk
где Mk — пульсирующая составляющая момента от гармоники к-го порядка; p — число пар полюсов АД; m 1 — число фаз статора; 12к — активная составляющая тока ротора; r2k — активное сопротивление обмотки ротора АД; sk — скольжение k-й гармоники.
Параметры скольжения k -й гармоники могут быть определены из выражения: S k = [( k ± 1 ) ± s ] / k ,
где верхние знаки относятся к гармоникам прямой, а нижние — к гармоникам обратной последовательности тока статора АД; s — скольжение при пуске — торможении АД, отличающееся от номинального значения.
Следует отметить, что переменные составляющие момента АД от гармоник вызывают изменение частоты вращения ротора при низких частотах тока статора в виде рывков (вибрации или шагов), снижают диапазон регулирования частоты вращения вала АД. В этом случае пульсирующие моменты Mk в составе момента МП можно принять за внешние [11, 12, 13], что для случая трогания АД (начала движения РО) позволяет записать:
м3 3 « м П ,
где М^ — приведенный к валу входного звена ИМ момент сопротивления, зависимый от суммарной силы FL (техно логического сопротивления Fтс и трения покоя Fш) подвижного звена в направляющих (рис. 2). Причем значение М^
можно определить из соотношения:
MC3 = F^- i2, где i2 — передаточное отношение скорости точки приложения сил (Fгс + Fгп) к скорости входного звена.
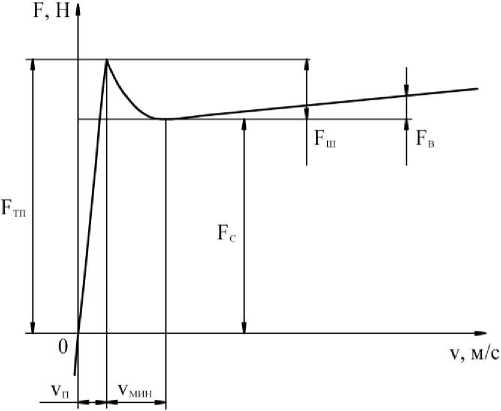
Рис. 2. Изменение силы трения вблизи нулевой (линейной) скорости движения звена в направляющих исполнительного механизма
Fig. 2. Change in frictional force near zero (linear) speed of link in actuator guides
Из рис. 2 следует, сила F тп в начале трогания ИМ (или при смене направления движения — реверсировании АД) может быть представлена соотношением:
F тп = F ш + F c ~ F т, (5)
где F Ш — сила трения Штрибека; F С — сила сухого трения; F Т — текущее значение силы трения.
При рассмотрении электромеханической системы (ЭМС, см. рис. 1), состоящей из двигателя (М) и исполнительного механизма ИМ, включая РО, приняты условия: система имеет жесткие звенья и одну степень подвижности.
Угол поворота ротора двигателя фд и приведенный к валу двигателя угол ф П поворота входного звена ИМ принимаются за обобщенные координаты и находятся в соотношении [14]:
Ф П = Ф1 — = Ф1 ii, ю Д где ю1, Год — скорости вращения ротора двигателя и входного вала ИМ; i 1 — передаточное отношение скоростей точек механизма.
Движущий момент M З на входе звена ИМ определяется из выражения:
M З = c ( Ф д - Ф 1 i i ) + Ц ( Ф Д - Ф1^ 1 ) , где с , р — коэффициенты жесткости и вязкого внутреннего трения между массами ведущего и ведомого валов. При этом соотношение для динамического момента трогания АД можно записать в виде:
J " d? = M Д - ( M З + M С ) .
С учетом выражений (3) и (5), когда сила трения покоя F тп в условиях эксплуатации ПМ может изменяться [14] в широком диапазоне, т. е. F тп / F с г (0,1.. .2,5), необходимое значение внешней суммарной движущей силы F ( t ) для РО должно соответствовать соотношению F ( t ) > F тп . С целью улучшения работы ПМ с ЧУЭП авторами статьи предложено использовать вибрацию ротора АД (в пределах допустимых значений по ГОСТ 20815, МЭК 60034-14) для условной компенсации силы F тп. Такое соотношение действующих сил в контактной зоне направляющих ИМ можно обеспечить за счет управляемых по амплитуде пульсирующих моментов на валу АД, создаваемых гармоническими составляющими тока статора (при частотах 0,5-20 Гц [7] в системе «АИН — АД») в зоне малой и ползучей скорости движения ИМ.
Исследования [15] показывают, что характер зависимости силы трения покоя F тп от скорости ( V) перемещения звена подвижности различен и его следует рассматривать на примере неразрывной функции (см. рис. 2). Характер изменения силы трения F тп наиболее полно отражает физические процессы в механическом контакте, распределенном в плоскости между телами — подвижными звеньями ПМ на малом участке скорости, где V ^ 0. Здесь сила трения изменяется линейно и пропорционально скорости [8] с коэффициентом F тп/ V п, где V п — пороговая скорость, значение которой при расчетах и моделировании обычно принимается 10-4-10-6 м/с.
Характеристика Штрибекова трения F Ш имеет отрицательный наклон в диапазоне низких скоростей ( V мин - V п) относительного перемещения трущихся тел. Сумма сил F ш + F c на границе диапазона (0 - V п ) малой скорости (или в окрестности линейной нулевой скорости) образует силу трения покоя F тп (силу трения срыва [16]).
Для нарушения состояния относительного покоя твердого тела (в соединениях направляющих движения) часто используют вибрации тела, обеспечиваемые внешней приложенной силой F ( t ) > F тп . Для приближенной оценки влияния вибрации на систему с трением используют эффективный коэффициент сухого трения ( K эф), определяемый отношением минимального значения приложенной силы P * (из соотношения F ( t ) > P * > F тп) к нормальной реакции N ,
Машиностроение и машиноведение
создаваемой массой РО, т. е.:
К = P
К эф N
.
Такое соотношение сил в направляющих ИМ можно сохранить за счет продольной (внешней) силы Ф = Фо • sin(w t ), создаваемой пульсирующими составляющими момента M П , что позволяет обеспечить управляемую по амплитуде Фо и частоте ю = 2п f вибрацию [11, 13] звена подвижности ИМ, например, РО (рис. 1).
Если в какой-то момент времени значение суммы приложенной силы P * и вибрационной составляющей Ф внешней силы F ( t ) становится меньше предельной силы трения покоя, т. е.:
P , +Ф 0sin ( ю t ) < f0N , (10)
тело будет находиться в состоянии покоя.
При (sin( ю t ) = 1) в выражении (10) составляющая силы Ф = Ф о • sin( ю t ) достигает максимального значения, состояние покоя нарушается и тело приходит в движение. Тогда:
P * = f 0 N -Ф o ,
где f 0 — пороговый коэффициент трения взаимодействующих звеньев — плоскостей ПМ.
С учетом (11) выражение (9), определяющее значение К эф для случая продольной вибрации тела в направляющих (см. рис. 1), можно записать в виде:
эф
P = f f i —Ф )
N J I f ) ■ N У
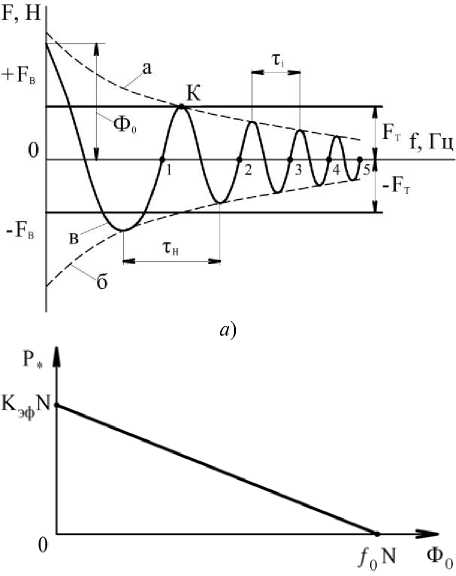
Из (12) следует, что с увеличением Ф о (рис. 3, а ) значение эффективного коэффициента К эф уменьшается (рис. 3, б).
б)
Рис. 3. К оценке минимального значения эффективного коэффициента трения от амплитуды вибрации звена подвижности ПМ
Fig. 3. To estimation of minimum value of effective friction coefficient of vibration amplitude of PM mobility unit
Если амплитуда Ф0 превышает предельную силу трения, т. е. Фо > f0 • N , то рассматриваемое звено подвижности РО приходит в движение условно при измененном коэффициенте трения ( К эф ~ 0) за счет вибрации. Такие условия могут быть созданы при управлении амплитудами 5-й и 7-й гармоник тока статора АД, а также при изменении частоты от 5 до 0,5 Гц (кривая в , рис. 3, а ) и периода колебаний от T i до Т н . Мгновенное значение Ф i гармоники в тока статора АД (регулируемой частоты f ) определяется условно в пределах граничных (экспоненциальных) линий а и б , изменяемых по знаку и значению соответственно выражению Ф i = ±Ф 0 ■ e - n^i .
Состояние измененного коэффициента трения ( К эф ) в системе зависит от момента достижения соотношения F ( t ) > F гп , что соответствует точке К (см. рис. 3, а ). Интенсивность регулирования значения Ф i зависит также от программируемого числа n (из диапазона 1^10) колебаний гармоник амплитудой Ф i > F тп рассматриваемой частоты f тока статора.
На рис. 3 показано, что при частоте тока статора f ~ 1 Гц пульсирующий момент M v на валу АД от 5-й гармоники превышает момент срыва, т. е. M v > М тп , и движение звена ИМ переходит в зону вязкого трения (левее точки К ), где действует уже дополнительная сила (± F в ) > (± F т ). Вынужденные колебания выходного звена ПМ, обусловленные наложением электромагнитных моментов (от гармоник тока статора и момента силы трения F тп ) на основной момент АД, создаваемый первой гармоникой, обычно сопровождаются сложными вибрационными процессами в механических системах ПМ. Их анализ и частичное решение приведены в [11, 17, 18].
Введение условной величины К эф с целью оценки влияния вибрации на изменение момента трогания М тп позволяет определить особенности движения звена подвижности ПМ в зоне малой скорости (0- V п ) применительно к ЧУЭП.
Исследования и экспериментальная проверка предлагаемого технического решения проводились на стенде (рис. 4), структурная схема которого приведена на рис 5.
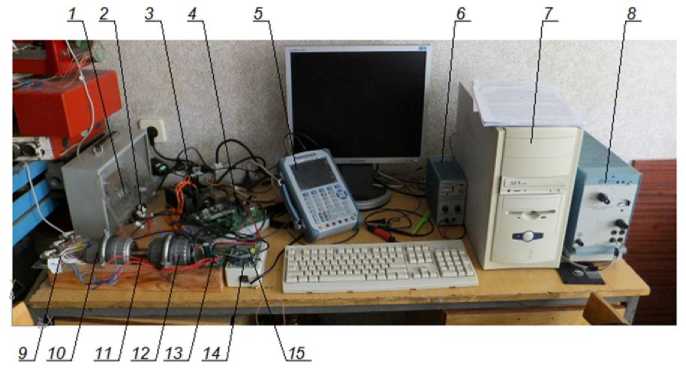
Рис. 4. Общий вид экспериментального стенда: 1 — блок питания 2 (БП2); 2 — датчик тока (ДТ); 3 — АИН1;
4 — микропроцессорная система; 5 — портативный осциллограф (ПК2); 6 — блок питания 3 (БП3); 7 — персональный компьютер (ПК1); 8 — блок питания 1 (БП1); 9 — токосъемные резисторы для измерения токов АД2; 10 — асинхронный двигатель (АД2);
11 — жесткая муфта; 12 — асинхронный двигатель (АД1); 13 — АИН2; 14 — детектор фаз (ФД); 15 — генератор (Г)
Fig. 4. General form of test bench: 1 — power source 2 (PS2); 2 — current sensor (CS); 3 — AVI1; 4 — microprocessor system; 5 — portable oscilloscope (PO 2); 6 — power source 3 (PS 3); 7 — personal computer (PC 1); 8 — power source 1 (PS 1); 9 — current-collecting resistors for AM 2 current measurements; 10 — asynchronous motor (AM 2); 11 — rigid coupling;
12 — asynchronous motor (AM 1); 13 — AVI2; 14 — phase detector (PD); 15 — generator (G)
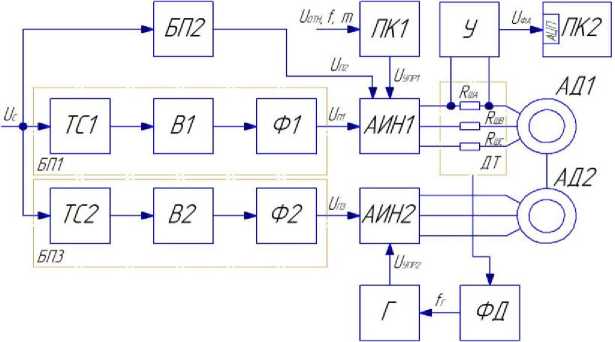
Рис. 5. Структурная схема экспериментального стенда: ТС1, ТС2 — силовые трансформаторы; БП1, БП3 — блоки питания сетевого напряжения U С ; В1, В2 — неуправляемые выпрямители; Ф1, Ф2 — ( LC -фильтры с коэффициентом пульсаций напряжения не более ± 0,05 %); ПК1 — персональный компьютер с программно-аппаратным обеспечением для формирования сигналов управления
IGBT -ключами (или MOSFET -ключами) АИН1; Г — генератор формирования сигнала U УПР2 для управления АИН2; ФД — детектор фазы 5-й и 7-й гармоник тока статора АД2; АИН1, АИН2 — автономные инверторы напряжения с соответствующими напряжениями питания U П1, U П3 и управления U УПР1 (с выхода ПК1), U УПи с выхода Г для реализации вибрации АД2; БП2 — блок питания логических элементов; R Ш А , R Ш В , R Ш С — измерительные шунты токов фаз А , В , С статора асинхронного двигателя АД1 (АИР-50 А2) с короткозамкнутым ротором; АД2 — вспомогательный АД (АИР-50 А2); У — широкополосный усилитель (0,1 - 3000 Гц с пропуском 40-й гармоники при коэффициенте искажения не более ±0,05 %); ПК2 — персональный компьютер с аналого-цифровым преобразователем (АЦП) и специализированным программным обеспечением, предназначенный для математической обработки аналоговых сигналов, на входы АЦП которого подается напряжение U Ф А с выхода У, пропорциональное току фазы А статора АД1
Fig. 5. Block scheme of test bench: ТС1, ТС2 - power transformers; БП1, БП3 - supply units of circuit voltage U С ; В1, В2 - uncontrolled rectifiers; Ф1, Ф2 - (LC-filters with voltage ripple factor no more than ± 0.05%); ПК1 - personal computer with firmware for generating control signals for IGBT-keys (or MOSFET-keys) of АИН1; Г - signal generator U УПР 2 for controlling АИН2; ФД - phase detector of the 5th and 7th harmonics of stator current АД2; АИН1, АИН2 - autonomous voltage inverters with corresponding supply voltages U П 1, U П 3 and control U УПР 1 (from the output of ПК1), U УПР 2 from the output Г to realize vibration АД2; БП2 - power supply unit of logic elements; R ША , R ШВ , R ШС - instrument shunts of phase currents A, B, C of asynchronous motor stator АД 1 (АИР-50 А2) with cage rotor; АД 2 - auxiliary АД (АИР -50 A2); У - broadband amplifier (0.1 - 3000 Hz with gap in 40th harmonic at distortion factor of not more than ± 0.05%); ПК 2 - personal computer with analog-to-digital converter (АЦП) and specialized software designed for mathematical processing of analog signals, to which inputs АЦП, U ФА voltage is supplied from output У, proportional to stator phase current A of stator АД1
Машиностроение и машиноведение
Оценка влияния вибрации на изменение эффективного коэффициента трения проводилась по измеренному значению напряжения трогания АД в режиме m -подмодуляции работы АИН [4, 6, 19]. Коэффициенты подмодуляции напряжения принимались: m = 1 (при вибрации) и m = 4 (без вибрации).
Исследования показали, что амплитуды колебательных моментов (которые для 5-й и 7-й гармоник и K u ~ 57 % соответственно составляют 7-20 % от М н ) изменяются пропорционально значениям K u и остаются постоянными при малых нагрузках и частотах, вызывая неравномерность вращения ротора АД.
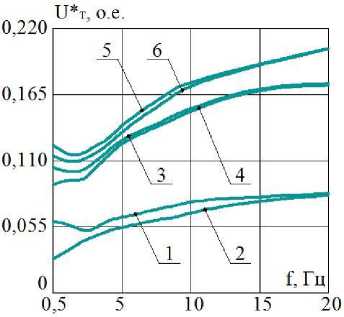
В результате эксперимента [20, 21] подтверждено влияние вибрации ротора АД на эффективный коэффициент K эф трения. Это вытекает из анализа полученных зависимостей { U * т (f )} для режимов:
— с подмодуляцией (на рис. 6, а кривые 1 при М СТ = 0,1 М Н ; 3 при М СТ = 0,3 • М Н ; 5 при М СТ = 0,5- М Н и m = 4);
— без подмодуляции (кривые 2 при М СТ = 0,1 • М Н ; 4 при М СТ = 0,3 • М Н ; 6 при М СТ = 0,5 • М Н и m = 1).
Здесь U * т = U т / U тс — значение относительного напряжения трогания АД, М СТ — приведенный к ротору АД статический момент нагрузки, М Н — номинальный момент АД.
b )
Рис. 6. Зависимости значений U *т при изменении коэффициентов m- подмодуляции формируемого U АИН и частоты f тока статора АД
Fig. 6. Value dependences of U*т under coefficients variation of m-submodulation of generated UАИН and stator current frequency f
Следует отметить значительное уменьшение относительного напряжения U * т при снижении частоты менее 10 Гц, что свидетельствует об уменьшении K эф трения в звеньях подвижности ПМ ЧУЭП.
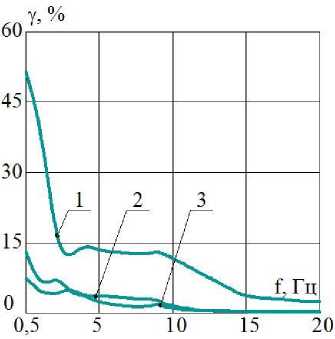
На рис. 6, б приведены зависимости 1 при М СТ = 0,1 М Н ; 2 при М СТ = 0,3- М Н ; 3 при М СТ = 0,5- М Н относительного изменения приращений у амплитуд напряжений трогания АД с подмодуляцией и без нее. Они определяются для частот от 0,5 до 20 Гц с интервалом 5 Гц из соотношения
Y = {( U * тс — U *™)/ U * тс }^100 %, где U *тс — относительное синусоидальное напряжение трогания АД ( m = 4); U *та — относительное напряжение трогания АД ( m = 1).
Пусковой ток и, соответственно, момент М тп определялись по изменению значения U * т = 0^1 (за счет регулирования выходного напряжения блока БП1 с номинальным напряжением U БП = 100 В) и выбранной интервальной установкой частоты тока АИН в диапазоне 0,5-20 Гц. При повышении частоты тока статора f влияние рассматриваемого коэффициента K эф уменьшается, движение звеньев ИМ осуществляется уже в области линейного (вязкого) трения.
Экспериментально полученные значения скоростей и ускорений движения контрольных точек РО (с подключением датчиков: энкодеров и акселерометров) при двухрежимном управлении АИН и регулировании вибрации ротора АД подтвердили уменьшение негативного влияния сил трения в звеньях ПМ на динамику движения РО [22].
В результате анализа данных, полученных при исследовании на стенде, установлены следующие факты:
— расширен диапазон регулирования скорости привода (от 80 до 120);
— повышена равномерность вращения вала АД в 1,2–1,5 раза в зоне малой скорости движения РО, т. е. при частотах тока статора 0,5–20 Гц.
При этом обеспечивается формирование целесообразных механических характеристик АД [23, 24] и приемлемая реализация потребления электроэнергии (по минимуму потерь) в пускотормозных режимах работы ЧУЭП.
Выводы. Выполненные в статье теоретические и экспериментальные исследования позволяют сделать следующие выводы.
-
1. Неоднозначность коэффициентов трения в звеньях ПМ удобно оценивать по уровню напряжения трогания АД, значение которого является исходным для программного выбора способа управления двухрежимным АИН по формированию выходного напряжения.
-
2. Снижение эффективного коэффициента K эф трения в звеньях подвижности ПМ (в зоне малой и ползучей скорости движения РО) обусловлено эффектом вибрационной линеаризации сил трения в направляющих ИМ под действием пульсирующих моментов на валу АД.
-
3. Пульсирующие моменты на валу АД ЧУЭП, формируемые 5-й, 7-й и основной гармониками тока статора АД и создающие колебательные (вращающие и тормозящие) моменты, способствуют снижению напряжения трогания U т статора АД от 7 % до 50 % в пускотормозных режимах работы АД при изменении частоты тока статора в диапазоне 0,5–20 Гц.
-
4. Введение программного управления коэффициентом m -подмодуляции в пределах (2 ≤ m ≤ 4) формируемого напряжения АИН (при K u ≤ 5–8 %) способствует повышению равномерности движения и точности позиционирования РО при торможении АД ЧУЭП.
Список литературы Управляемая вибрация звеньев подвижности производственного механизма
- Браславский, И. Я. Энергосберегающий асинхронный электропривод/И. Я. Браславский, З. Ш. Ишматов, В. Н. Поляков. -Москва: Academia, 2004. -241 c.
- Карнаухов, Н. Ф. Улучшение характеристик частотного электропривода технологических машин в зоне малой скорости движения исполнительного механизма/Н. Ф. Карнаухов, Ю. В. Пудова, М. Н. Филимонов//Молодежь. Техника. Космос: тр. IV Общероссийской молодежной науч.-техн. конф. -Вестник БГТУ. -2012. -№ 15. -С. 331-333. -(Библиотека журнала «Военмех»).
- Карнаухов, Н. Ф. Частотно-управляемый асинхронный электропривод мехатронных систем/Н. Ф. Карнаухов. -Ростов-на-Дону: Изд. центр ДГТУ, 2009. -224 c.
- Зельченко, В. Я. Расчет и проектирование автоматических систем с нелинейными динамическими звеньями/В. Я. Зельченко, С. Н. Шаров. -Ленинград: Машиностроение, 1986. -174 с.
- Перельмутер, В. М. Прямое управление моментом и током двигателей переменного тока/В. М. Перельмутер. -Харьков: Основа, 2004. -210 с.
- Карнаухов, Н. Ф. Особенности формирования циклических режимов частотного электропривода технологических машин в зоне малой скорости движения исполнительного механизма/Н. Ф. Карнаухов, М. Н. Филимонов, А. И. Изюмов//Вестник Дон. гос. техн. ун-та. -2012. -№ 6 (67). -С. 76-86.
- ГОСТ32144-2014. Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего назначения/Межгосударственный совет по стандартизации, метрологии и сертификации. -Москва: Стандартинформ, 2014. -16 с.
- Следящие приводы. В 3 т. Т. I. Теория и проектирование следящих приводов/под ред. Б. К. Чемоданова. -2-е изд., доп. и перераб. -Москва: Изд-во МГТУ им. Н. Э. Баумана, 1999. -904 с.
- Карнаухов, Н. Ф. Моделирование колебаний звена технологической машины в режиме динамического торможения асинхронного двигателя при частотном управлении/Н. Ф. Карнаухов, М. Н. Филимонов, Ю. В. Пудова//Вестник Дон. гос. техн. ун-та. -2010. -Т. 10, № 4 (47). -С. 569-574.
- Розанов, Ю. К. Электронные устройства электромеханических систем/Ю. К. Розанов, Е. М. Соколова. -Москва: Академия, 2004. -272 с.
- Бидерман, В. Л. Теория механических колебаний/В. Л. Бидерман. -Москва: Высшая школа, 1980. -408 с.
- Вибрации в технике. Справочник в 6 томах/под ред. К. В. Фролова. Москва: Машиностроение, 1981 -453 c.
- Федоренко, И. Я. Технологии и средства механизации сельского хозяйства/И. Я. Федоренко, У. К. Сабиев//Вестник Алтайского гос. аграр. ун-та. -2011. -№ 6 (80). -С. 82-85.
- Филонов, И. П. Теория механизмов, машин и манипуляторов/И. П. Филонов, П. П. Анципорович, В. К. Акулич. -Минск: Дизайн ПРО, 1998. -656 с.
- Abdo, J. The Effect of Frequency and Amplitude of Vibration on the Coefficient of Friction for Metals/J. Abdo, M. Tahat//Tribology International. -2008. -Vol. 41, is. 4. -P. 307-314.
- Altpeter, F. Friction modeling, identification and compensation/F. Altpeter. -Lausanne:EPFL, 1999. -150 p.
- Пановко, Я. Г. Лекции по основам теории вибрационных машин и технологий/Я. Г. Пановко. -Москва: Изд-во МГТУ им. Н.Э. Баумана, 2008. -192 с.
- Зотеев, В. Е. Параметрическая идентификация диссипативных механических систем на основе разностных уравнений/под ред. В. П. Радченко. -Москва: Машиностроение, 2009. -344 с.
- Электромеханические системы управления тяжелыми металлорежущими станками/С. В. Демидов ; под общ. Ред. С. В. Демидова. -Ленинград: Машиностроение, 1986. -236 с.
- Моделирование режима торможения асинхронного двигателя частотного электропривода с использованием гармоник тока статора/Н. Ф. Карнаухов //Вестник Дон. гос. техн. ун-та. -2016. -Т. 16, № 1 (84). -С. 87-98.
- Филимонов, М. Н. Улучшение динамики торможения асинхронного двигателя станочной системы с частотным управлением/М. Н. Филимонов, Н. Ф. Карнаухов//Современные проблемы машиностроения и высоких технологий: мат-лы междунар. науч.-техн. конф. В 3 т. -Ростов-на-Дону: Изд-во Дон. гос. техн. ун-та. -2005. -Т. 1 -С. 236-242.
- Карнаухов, Н. Ф. Особенности формирования двухтокового динамического торможения асинхронного двигателя мехатронной системы при частотном управлении/Н. Ф. Карнаухов, М. Н. Филимонов, Н. В. Деркачев//Мехатроника-2008: мат-лы IV Междунар. науч.-практ. студ. коллоквиума. -Новочеркасск, 2008. -С. 17-20.
- Карнаухов, Н. Ф. Энергетические показатели электропривода при частотном способе управления асинхронным двигателем/Н. Ф. Карнаухов, В. А. Прус, М. Н. Филимонов//Труды VIII Междунар. науч.-техн. конф. по динамике технологических систем. -Ростов-на-Дону: Изд-во ДГТУ, 2007. -Т. III. -С. 24-30.
- Установка для демонстрации рекламно-информационного материала и устройство управления перемещением носителя: патент № 36914 Рос. Федерация: МПК7 G 09 F 13/00 H 02 P 7/36/Н. Ф. Карнаухов, М. Н. Филимонов, С. А. Ушаков. -Опубл. 27.03.04, Бюл. № 9. -14 c.
