Упругопластические колебания стержневой системы с учётом продольной податливости её элементов при запроектном воздействии

Автор: Потапов Александр Николаевич, Уфимцев Евгений Михайлович
Рубрика: Теория расчета строительных конструкций
Статья в выпуске: 2 т.14, 2014 года.
Бесплатный доступ
Показано приложение метода временного анализа к задачам механики стержневых систем с учётом упругопластической работы материала. Приведён пример динамического расчёта плоской 3-стержневой ферменной конструкции на действие импульсной нагрузки.
Метод, временной анализ, математическая модель, билинейная диаграмма, колебания, перемещения, восстанавливающая сила, упругопластические деформации, гистерезис
Короткий адрес: https://sciup.org/147154381
IDR: 147154381 | УДК: 624.04:539.3:534
Elastoplastic oscillations of bar system taking into account longitudinal malleability of its elements under the influence beyond design
The application of time analysis to the problems of bar systems mechanics in the context of elastoplastic behavior of the material was shown. An example of dynamic design of a plane three-core truss structure by impulse load was given.
Текст научной статьи Упругопластические колебания стержневой системы с учётом продольной податливости её элементов при запроектном воздействии
Введение. Одной из актуальных проблем, связанной с расчётами современных конструкций (особенно при динамических воздействиях), является проблема учёта работы материала за пределом упругости. Экспериментальные исследования в этом направлении показывают, что характер работы различных материалов может быть довольно сложным [1]. Несмотря на это, на сегодняшний день разработаны и внедрены в практику вычислительные методы, позволяющие проводить расчёты в такой постановке [2–4].
Однако большинство используемых методов построено на численных подходах. С одной стороны, это делает возможным решение широкого спектра задач, а с другой – остаётся открытым вопрос адекватности результатов расчётов и оценки действительного состояния конструкций.
В связи с этим по-прежнему актуальной является разработка аналитических подходов для решения подобных задач. Наиболее естественным является метод временного анализа, основанный на исследовании характеристического матричного квадратного уравнения [5].
В данной статье рассматривается проблема расчёта систем указанным методом с учётом упругопластической работы материала при действии динамических нагрузок. Приводится пример расчёта статически нагруженной плоской стальной ферменной конструкции при действии импульсной нагрузки и даётся анализ работы системы.
Математическая модель упругопластического расчёта. Физическая модель материала принята по билинейному закону в координатах ст ~ £ (рис. 1). В осях «восстанавливающая сила -относительное перемещение» ( R ~ у ), вектор динамических восстанавливающих сил выражается зависимостью (рис. 2):
R ( t ) = R ke ( t ) + R u ( j - R p ( t j ). (1)
Эта формула представляет собой математическую модель расчёта системы при упругопластическом деформировании её несущих элементов.
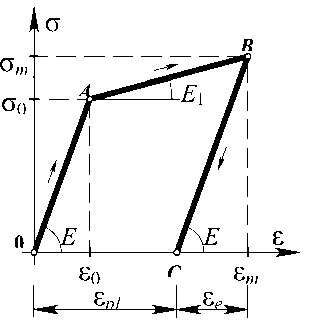
Рис. 1. Диаграмма деформирования материала
Представим характеристику векторных величин правой части выражения (1).
Составляющая R ke ( t ) = K ( t j ) • Y ( t ) - вектор квазиупругих усилий, где K ( tj ) – матрица жёсткости системы в момент tj (точка A на диаграмме), – время перехода квазиупругой системы из одного промежуточного состояния в другое (начало текучести в некотором несущем элементе). Здесь tgα, tgα 1 – жёсткость некоторого несущего элемента, соответственно, на участках OA и AB .
Составляющая R u ( t j ) = A K ( t j ) • Y ( t j ) - есть вектор предельных значений (на рис. 2 приведена k -я компонента этого вектора), где A K ( t j ) = K ( t j - 1 ) - K ( t j ) - разность матриц жёсткости, соответствующих предыдущему (участок OA ) и текущему(участок AB ) состояниям системы.
Составляющая R p ( t j ) = K ( t j ) • Y p ( t j ) - суть вектор остаточных усилий. При достижении экстремальных деформаций (в момент времени t j ) в несущем элементе начинается разгрузка (участок BC ). В результате этого он приобретает необратимые остаточные напряжения и деформации, что в координатах R ~ y выражается векторами R p ( t j ) и Y p ( t j ), постоянными на интервале [ t j , t j + 1 ] , где Yp ( tj ) – вектор пластических перемещений.
Численная реализация задачи. В качестве примера рассмотрена задача колебаний плоской ферменной конструкции как системы с двумя степенями свободы (n=2), расчётная динамическая модель (РДМ) которой представлена на рис. 3. Элементы системы имеют квадратные поперечные сечения со сторонами: 1 – 2,6 см, 2 – 1,0 см, 3 – 2,5 см и выполнены из стали 09Г2С с начальным модулем упругости E = 210060 МПа. Точечная масса принята m = 10 т. Векторы перемещений и узловой статической нагрузки, а также матрица масс имеют вид:
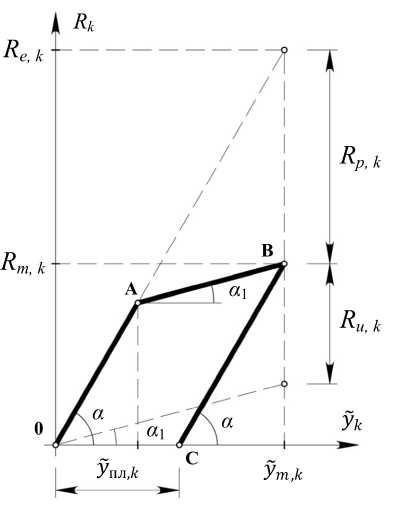
Рис. 2. Составляющие вектора динамических восстанавливающих сил R
Y ( t ) =
y 1( t ) y 2( t )
Q = mg
m
M =
m
Элементы матрицы жёсткости K ( tj ) вследствие нелинейности задачи, обусловленной моделью (1), вычисляются в процессе временного анализа с использованием пособия [6]. Матрица демпфирования C строится по модели непропорционального демпфирования [5] и вычисляется в процессе временного анализа совместно с матрицей жёсткости.
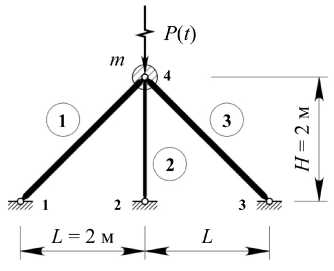
Рис. 3. Расчетная схема конструкции
Таким образом, описанная математическая модель позволяет разбить процесс временного анализа на ряд квазиупругих интервалов [ t j , t j + 1 J ( j = 0,1,... ) , внутри которых составляющие вектора восстанавливающих сил Ru ( tj ) и Rp ( tj ) представляют собой постоянные величины. В результате такого моделирования уравнение движения дискретной диссипативной системы на отдельном интервале можно реализовать по схеме упругого решения:
MY ( t ) + CY ( t ) + K ( t j )Y ( t ) =
= P ( t ) + Q - R „ ( t j ) + Rp ( t j ). (2)
Так как векторные добавки Ru ( tj ) и Rp ( tj ) представляют собой силовые характеристики, действующие на массы системы, то их внезапное появление или исчезновение, связанное с упругопластическими процессами в материале, будет приводить к изменению ускорений масс, дополнительные значения которых равны M -1 •[ R p ( t j ) - R ( t j .) ] .
Внешняя нагрузка представлена в виде синусоидального импульса P ( t ) = P 0 - sin( 0 1 ), где P 0 = [0, 425] Т кН - вектор амплитуд, 0 = п / t a ; t a = 0,01 с -время действия импульса.
Система разрешающих уравнений динамической задачи (2) на квазиупругом интервале t е [ t j , t j + 1 ] имеет вид:
y ( t ) = 2Re { Z ( t )}, Y ( t ) = 2Re { S·Z ( t )}, (3)
где
' Z ( t ) = 0,5 Y t + 2 0 ( t - t j ) + ZQR ( t - t j ) + Z P ( t - t j ), ZQR ( t - t j ) = [ Ф ( t - t j ) - E ] ( US ) "1 [ Q - + ],
- 2 0( t - t j ) = Ф ( t - t j ) U -1 М [-Y 0 + ], (4)
Z P ( t - t j ) = { S [ Ф ( t - t j ) sin( qt j ) - sin ( qt )] + + [ Ф ( t - t j ) cos( qt j ) - cos( qt )] q }[ U ( S 2 + Eq 2 )]"1 P 0.
Здесь Yst = K–1Q,Ф(t) = eSt, U= MS + SТM+ C,S – матрица внутренних характеристик конструкции – решение матричного характеристического уравнения, соответствующего системе однородных диф- ференциальных уравнений с постоянными коэффициентами (2) [5]; y0, Y0 – векторы начальных условий.
Временной анализ реакции проводится на интервале времени t = [0, 5] с при шаге интегрирования A / =0,0001 с . При заданных условиях работы нелинейные колебания происходят в наиболее нагруженном 2-м элементе фермы (рис. 3), в то время как остальные стержни работают упруго. Упругопластические процессы во 2-м стержне протекают в течение первых 0,15 секунд и, главным образом, на этапе свободных колебаний, после чего система переходит в режим упругих колебанийс учётом накопленных пластических деформаций.
Нелинейная стадия работы характеризуется тем, что система находится в состоянии циклического упругопластического деформирования. За наступившими пластическими деформациями следует разгрузка, затем этот процесс неоднократно повторяется, что свидетельствует о гистерезисном поведении зависимости а ~ 8 . На рис. 4 показана первая петля гистерезиса с характерными точками, отделяющими линейные участки друг от друга. Эти же точки, согласно представленной математической модели расчёта (1), находятся в соответствии с временными точками, расчленяющими процесс упругопластической реакции системы на ква-зиупругие интервалы (см. таблицу).
В упругой стадии (при t > 0,15 с )свободные колебания системы совершаются относительно нового положения равновесия, которое отличается от первоначального положения статического равновесия Yst ( t ) тем, что к последнему добавляются остаточные перемещения – компоненты вектора Yp ( t ) , накопленные системой в процессе пластического деформирования.
При реализации разрешающих уравнений (3), (4) положения характерных точек диаграммы (рис. 4) (с учётом одинаковой работы материала на растяжение-сжатие) находятся следующим образом. Точка A определяется из условия достижения нормальными напряжениями в среднем стержне предела текучести σ0, а положение точки B – из условия достижения в нем экстремальных деформаций. Нахождение точки D связано с использованием принципа Мазинга [1], согласно которому переход к неупругому деформированию во втором полуцикле происходит после упругого деформирования на величину, равную двум пределам текучести. То есть суммарное напряжение (расстояние между точками B и D ) не должно превышать 2σ0. Положение точки E , как и точки B , определяется из условия достижения экстремума деформаций.
Анализ результатов. На рис. 5 показаны осциллограммы перемещений (а), ускорений (б) и восстанавливающих сил (в). Цифры обозначают направление колебаний: 1 – по горизонтали; 2 – по вертикали.
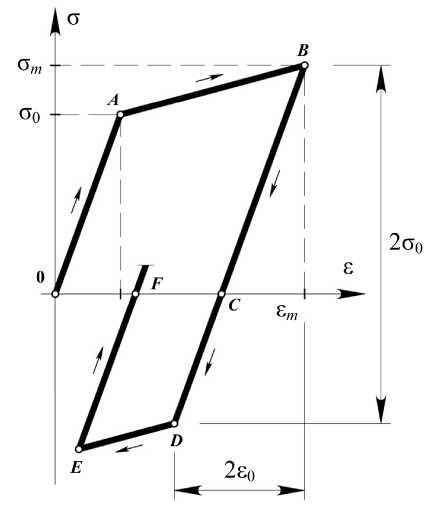
Рис. 4. Диаграмма деформирования 2-го стержня фермы за один полный цикл на интервале времени t = [0; 0,0874]
Временные точки переходов системы в новые состояния
|
Точки диаграммы (рис. 4) |
Время t , с |
|
0 |
0 |
|
A |
0,0098 |
|
B |
0,0265 |
|
C |
0.0455 |
|
D |
0,0584 |
|
E |
0,0680 |
|
F |
0,0874 |
Осциллограмма вертикальных перемещений массы m (рис. 5, а) представляет собой график без переломов и разрывов. При этом колебания совершаются относительно ненулевой асимптоты, высота которой меняется при переходе от одного квазиупругого интервала к другому. После t = 0,15 с высота асимптоты остаётся постоянной и равна yst ,2 + y p ,2 =- 0,2038 см, где yst2 =— 0,167 см - статический прогиб в начальный момент времени, y p , 2 =- 0,0368 см - вертикальная компонента вектора остаточных перемещений. Для колебаний массы в горизонтальном направлении характерны те же эффекты, что и для вертикальных колебаний, но они выражены значительно слабее.
В отличие от графиков перемещений осциллограммы ускорений (рис. 5, б) не имеют смещения относительно положения статического равновесия системы. На фрагментах графика ускорений масс в
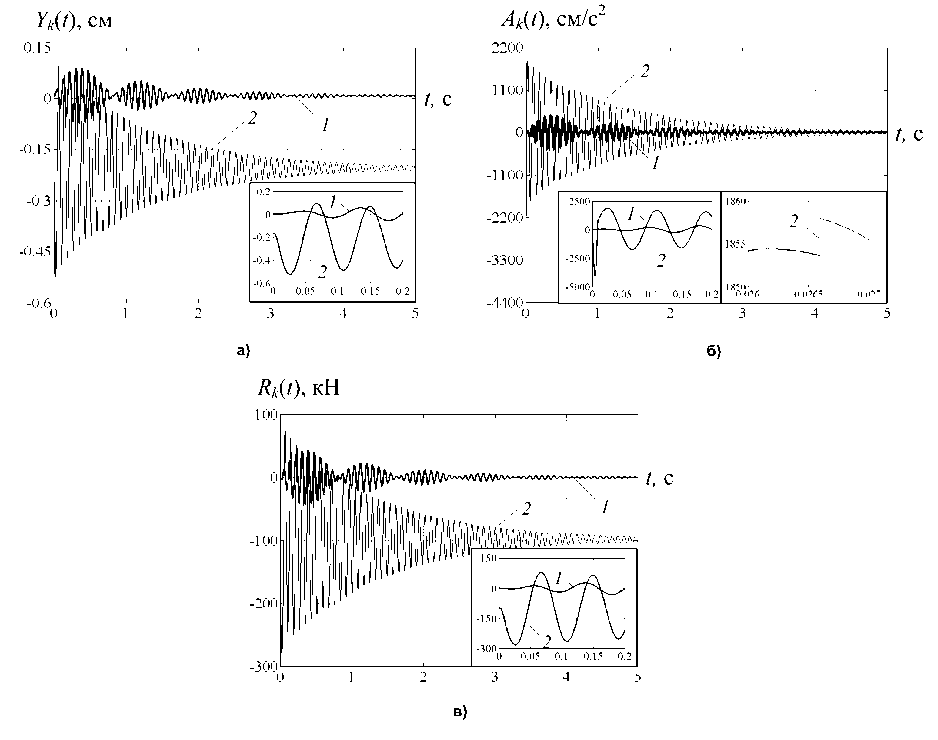
Рис. 5. Параметры реакции системы (1 – по горизонтали, 2 – по вертикали): а – перемещения; б – ускорения; в – восстанавливающие силы
вертикальном направлении можно видеть перелом, связанный с окончанием действия импульсной нагрузки при t = 0,01 с (фрагм. 1), и один из скачков (фрагм. 2). Скачки образуются в результате внезапного изменения жёсткости системы.
Осциллограммы восстанавливающих сил R ( t ) (рис. 5, в ), как и осциллограммы перемещений, являются непрерывными. Компоненты восстанавливающих сил в горизонтальном направлении имеют нулевую асимптоту, в вертикальном направлении – асимптоту, соответствующую значению статического усилия от собственного веса конструкции Q .
Характер свободных колебаний всех параметров реакции – затухающий. При этом осциллограммы, соответствующие горизонтальным параметрам, имеют форму «биения», период которого составляет:
Ю 2 - Ю 1
2 п
76,69 - 69,3
= 0,82 с,
где ю1, ю2 - частоты собственных колебаний кон- струкции.
На рис. 6 показан график действующих вертикальных сил правой части уравнения (2). Пунк- тирной линией (а) изображена составляющая нагрузки правой части, включающая внешнюю нагрузку: импульсную P(t) и статическую (собственный вес Q). Сплошной линией (б) изображена полная нагрузка, включающая, помимо внешней, добавки к восстанавливающим силам Ru(tj) и Rp(tj):
L P i ( t ) = P ( t ) + Q - R ( j + R p ( t j ).
Данная нагрузка имеет ступенчатый характер, который связан с внезапным появлением или исчезновением составляющих Ru ( tj ) и Rp ( tj ) , что обусловлено принятой математической моделью упругопластического расчёта (1).
Выводы
-
1. Временной анализ позволяет получить точное решение задачи в аналитическом виде.
-
2. В замкнутой форме построены кинематические и силовые параметры реакции системы для динамической задачи с билинейной диаграммой деформирования гистерезисного типа.
-
3. Определены и изучены особенности поведения параметров реакции динамической системы: асимптоты, переломы, скачки и т. д.
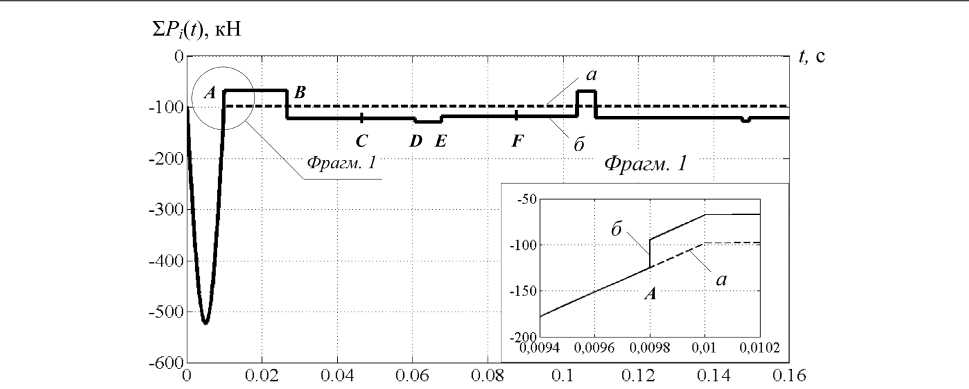
Рис. 6. Вертикальные силы правой части уравнения (2): а – составляющая импульсной и статической нагрузок; б – полная нагрузка
Список литературы Упругопластические колебания стержневой системы с учётом продольной податливости её элементов при запроектном воздействии
- Москвитин, В.В. Пластичность при переменных нагружениях/В.В. Москвитин. -М.: Изд-во МГУ, 1965 -264 с.
- Трушин, С.И. Метод конечных элементов. Теория и задачи: учеб. пособие/С.И. Трушин. -М.: Изд-во Ассоциации строительных вузов, 2008. -256 с.
- Расчёты зданий на устойчивость против прогрессирующего обрушения с учётом физической и геометрической нелинейностей/А.М. Белостоцкий, А.А. Аул, О.А. Козырев, А.С. Павлов//Междунар. науч.-практ. конф. «Теория и практика расчёта зданий, конструкций и элементов конструкций. Аналитические и численные методы»: сб. тр. -М.: Изд-во МГСУ, 2008. -С. 183-193.
- Агапов, В.М. Метод конечных элементов в статике, динамике и устойчивости конструкций/В.М. Агапов. -М.: АСВ, 2004. -248 с.
- Потапов, А.Н. Динамический анализ дискретных диссипативных систем при нестационарных воздействиях: моногр./А.Н. Потапов. -Челябинск: Изд-во ЮУрГУ, 2003. -167 с.
- Синицын, С.Б. Строительная механика в методе конечных элементов стержневых систем: учеб. пособие/С.Б. Синицын. -М.: Изд-во Ассоциации строительных вузов, 2002. -320 с.
