Уравнения трехмерной модели электромагнитного поля асинхронного двигателя с поперечным потоком

Автор: Иванчура Владимир Иванович, Суханов Владимир Валентинович, Никулин Николай Анатольевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1-1 (22), 2009 года.
Бесплатный доступ
Приведены результаты теоретического исследования электромагнитного поля одностороннего линейного асинхронного двигателя с поперечным магнитным потоком на базе трехмерной модели с учетом пространственных гармоник. Получены аналитические зависимости дифференциальных параметров электромагнитного поля в функции геометрии и линейной токовой нагрузки двигателя с произвольным числом фаз.
Линейный асинхронный двигатель, магнитный поток, индукция, электромагнитное поле, переменный ток, обмотка, фаза, многофазная система
Короткий адрес: https://sciup.org/148175774
IDR: 148175774 | УДК: 621.313.3
Equations of three dimension electromagnetic field model of multiphase linear induction motor with transverse flux
Theoretical research of an electromagnetic field of the single-sided multiphase linear induction motor with transverse flux on the basis of three-dimensional model are presented. Analytical dependencies and the differential parameters of the electromagnetic field in terms of geometry and motor linear current density with arbitrary number of phases are received.
Текст научной статьи Уравнения трехмерной модели электромагнитного поля асинхронного двигателя с поперечным потоком
Стремление эффективного использования активного объема электрической машины требует совершенствования методов их расчета, в максимальной степени базирующихся на аналитических соотношениях, позволяющих наиболее полно исследовать взаимосвязи между геометрией машины и ее выходными характеристиками. Определение дифференциальных параметров электромагнитного поля ( E , H ) во всем объеме электрической машины с учетом ее конструктивной анизотропии дает более точные расчеты.
При аналитическом исследовании электромагнитного поля в линейных асинхронных машинах используется математическая модель машины в виде совокупности сплошных ортотропных сред. Для большинства линей- двигателя с произвольным числом фаз.
магнитный поток, индукция, электромагнитное поле, ных асинхронных двигателей (ЛАД) могут быть определены следующие характерные зоны: активный слой индуктора, воздушный зазор, сплошная проводящая среды [1–3]. Размеры зон при выбранной системе координат не зависят от числа фаз моделируемой машины.
Практика создания индукционных машин показывает, что фактически во всех случаях пазы статора остаются открытыми. Дискретное размещение обмоток в открытых пазах статора создает в рабочем зазоре наряду с основной гармоникой поля также определенное количество высших пространственных гармоник [4].
С помощью модели бесконечно длинного и широкого индуктора определим характер распределения магнитного поля основной и высших пространственных гармо-
ник в рабочем зазоре. Что касается последних, то даже такая короткая машина, как двухполюсная, имеет по длине для пятой гармоники 10 полюсов, для седьмой - 14 и
т. д., т. е. для определения поля, создаваемого высшими пространственными гармониками, приближение бесконечно длинной машины оказывается достаточным.
Реальный m -фазный индуктор состоит из mn отдельных электромагнитов, где m - число фаз, n - число элементов в одной фазе. Каждый электромагнит может иметь обмотку в виде катушек, охватывающих сердечник только одного элемента (сосредоточенная обмотка), или в виде отдельных катушек, охватывающих несколько элементов (распределенная обмотка). Бегущее магнитное поле создается с помощью подключения обмотки к соответствующим фазам сети (инвертора). Количество фаз многофазных линейных асинхронных двигателей можно представить как m = m ( 5 , h ) = 2 5 (2 h + 1); 5 , h = 0,1,2, _ и выделить три вида числа фаз: m (5 = 0, h * 0) - нечетное; m (5 * 0, h = 0) - четное; m (5 * 0, h * 0) - четно-нечетное. По конструктивному исполнению многофазные асинхронные двигатели делятся на симметричные и несимметричные, что определяется расположением фазных обмоток на статоре. Целесообразность введения не-симметрии объясняется следующими причинами. В общем случае двигатель может быть выполнен симметричным при любом числе фаз. Однако такое исполнение с четно-нечетным числом фаз не оптимально по пульсациям тягового усилия при несинусоидальном напряжении. Для двигателей с такими числами фаз оптимально несимметричное исполнение. Симметричное исполнение оптимально только для двигателей с нечетным и четным числами фаз.
Для индуктора с q = 1 характерно то, что токи, текущие в любых расположенных рядом элементах, различаются по фазе на постоянный угол. Этот угол, в принципе, может быть произвольным, но, поскольку ширина фазной зоны в реальных индукторах может составлять только 60,90 и 120, будем считать, что упомянутый угол сдвига фазы равен 2 п / m .
Система токов представляет собой суперпозицию из
питании симметричной трехфазной нагрузки, соединенной в звезду без нулевого провода, симметричной системой напряжений в фазных токах и напряжениях присутствуют только гармоники прямой и обратной последовательностей, составляющие класс синхронных гармоник [5].
В системах с m > 4 гармоники фазных напряжений и токов по их свойствам делятся на три класса:
-
- синхронные: n = adm + v;
-
- асинхронные: [( a - 1) dm + 2] < ( n * ac ) < ( adm - 2);
-
- сквозные: n = ac,
где d = 1 для четных m ; d = 2 для нечетных m ; c = m /2 b -целое число; a , b = 0,1,2, _; v = ± 1. Свойства гармоник
каждого класса выявляются из анализа их операторов фазовых смещений a ( n , m , k ) = 2 n n ( k - 1)/ m с учетом (2).
Для синхронных гармоник a ( n , m , k ) = v 2 n ( k - 1)/ m , откуда следует, что они имеют чередование фаз, совпадающее с прямым ( v = +1) или обратным ( v = -1) чередованием фаз на первой гармонике. То есть класс синхронных составляют гармоники прямой и обратной последовательностей, в том числе и первая. Поля, создаваемые ими, движутся в пространстве синхронно с их частотой в прямом и обратном направлениях.
Чередование фаз на асинхронных и первой гармониках не совпадают Например, в пятифазной системе чередование фаз на третьих гармониках 1-3-5-2-4. Это явление приводит к тому, что поля, создаваемые асинхрон-
ными гармониками, вращаются в пространстве в прямом или обратном направлениях не синхронно с их частотой, а на одном периоде частоты совершают более одного оборота. Синхронные и асинхронные гармоники присутствуют в спектрах при любом m > 4.
Существование сквозных гармоник возможно только при четно-нечетном m = 2 5 (2 h +1) в нерасщепленных системах. Порядок этих гармоник может быть представлен выражением n = am /2 5 , с учетом которого a ( n , m , k ) = = a n ( k -1)/(2 5 /2). Из последнего выражения видно, что в 2 5 /2 симметричных (2 h + 1)-фазных подсистемах операторы фазовых смещений отличаются на 180 ° от операторов в других 2 5 /2-подсистемах. Причем во всех фазах одной
m подсистем при условии, что каждая следующая подсистема сдвинута вдоль оси x на расстояние 2 т / m и переменный ток, протекающий в относящихся к ней проводниках, сдвинут по фазе на угол 2 п / m :
m
xZ e
k = 1
2п( k - 1)( n ± 1)
wIe j ω t
A =----- x p τ
подсистемы сквозные гармоники имеют разные операторы. Эта особенность приводит к тому, что результирующее поле, создаваемое каждой сквозной гармоникой в m -фазной системе, равно нулю.
Выражение (1) можно упростить следующим обра-
зом:
m
, 1 m n , 2 k T
(7 + Z cos n e x ( x + —)).
2 k = 1 m
Л = WmIe j - p τ
x ( e
m j 2 П k - 1)( n ± 1)
Множитель Z e m в зависимости от n и m k=1
- j в x x + Z ( e - j (1 - v m )в x x + e -j(1+ V m№ x x )) v= 1
Как видно, разложение линейной токовой нагрузки рассматриваемого индуктора в ряд Фурье содержит про-
имеет следующие значения:
m 2 п ( k - 1)( n ± 1)
Z e m = k=1
(m ^ [ n ± 1] = am ,
= ^ ’ a = 0,1, 2,3,....
[ 0 ^ [ n ± 1] * am
Анализ (2) показывает, что при m > 4 отдельные группы гармоник приобретают принципиально новые свойства, отличающие их от гармоник в системах m < 4. При
странственные гармоники не со всеми номерами, а только с v m -1 и v m + 1, ( v > 1). Показатель степени у экспоненты в (3) для гармоник с номерами v m - 1 отрицательный. Это означает, что данные гармоники бегут в положительном направлении оси x . Гармоники с номерами v m + 1 бегут в отрицательном направлении оси x.
Токовый слой имеет пространственно-периодическое распределение линейной нагрузки по двум взаимно перпендикулярным направлениям (рис. 1). Он распределен
синусоидально, бежит вдоль оси x и имеет синусоидальное распределение вдоль оси z .
rot H = J ,
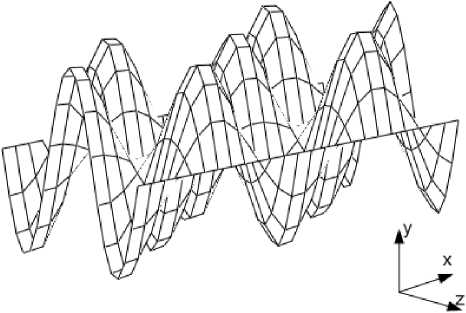
Рис. 1. Распределение линейной нагрузки
∂ B rot E =- ,
∂ t
То есть описывается следующим уравнением:
Δ= wmIe j ω t
∞ p τ
× ( e - j β x x +∑ ( e - j (1 - ν m )β x x + e - j (1 +ν m )β x x ))cosβ zz .
ν= 1
Расчетная модель линейной индукционной машины с поперечным магнитным потоком представлена на рис. 2. При построении расчетной модели приняты основные допущения: сердечник индуктора моделируется бесконечно длинной в поперечном и продольном направлениях средой с µ –3 и ρ 3; на поверхности сердечника расположен бесконечно тонкий токовый настил с линейной плотностью (4); система координат жестко связана с индуктором, который отстоит от электропроводного рабочего тела на расстоянии δ ; вторичный элемент представлен, как твердое тело с параметрами µ –2 и ρ 2 =∞ , который движется со скоростью u в направлении бегущего электромагнитного поля, создаваемого индуктором; среда 1 представляет собой воздушный зазор с параметрами µ –1= µ –0 и ρ 1= 0.
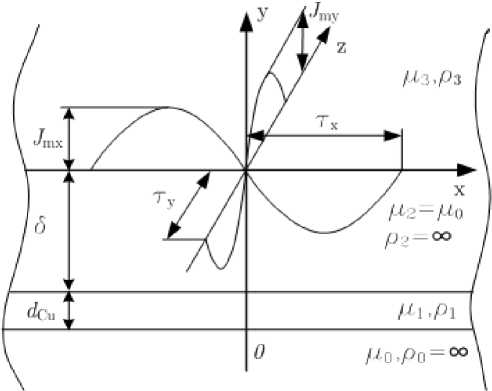
Рис. 2. Математическая модель одностороннего ЛАДПП
При заданном пространственно-временном законе изменения линейной токовой нагрузки, электромагнитное поле в любой области машины описывается уравнениями Максвелла:
div B = 0,
B = μ0 H .
Ток определяется из уравнения J = γ E .
Вводя вектор-потенциал A , получим B = rot A .
Из (6) и (10) следует
∂ A E =-
∂ t
.
Если вектор-потенциал выбран из условия div A = 0, то из (5) и (10) получим
С2 A =- μ J .
Подставляя значения J из (9) и E из (11) в уравнение (12), получим
С2 A =- μ dA . dt
Это основное уравнение поля записано для вектор-потенциала A движущейся среды.
Скорость вторичного элемента имеет только одну составляющую по оси x , поэтому можно записать
dA ∂ A ∂ A ∂ x ∂ A ∂ A =+=+ υ .
dt ∂ t ∂ x ∂ t ∂ t ∂ x
Из уравнений (13) и (14) получим
2 ∂ A ∂ A
∇ 2 A = μ γ + υμ γ .
∂ t ∂ x
В данном уравнении u – скорость движения вторичного элемента в направлении оси x . Считаем, что токи индуктора и вторичного элемента не имеют y -составляющей. Следовательно, можно допустить, что вектор-потенциал, обусловленный указанными токами, также не будет иметь ψ -составляющей [4; 5]
∂2A ∂2A∂ xxx ∂x2 ∂y2
∂A∂A =μγx+υμγ
∂ t ∂ x
∂2A ∂2A ∂2A z+z+z=
∂ x 2 ∂ y 2 ∂ z 2
∂ A ∂ A = μγ ∂ t z + υμγ ∂ x z .
Общие решения уравнений для вектор-потенциала получим в следующем виде:
wmI
A 1 x ( x , y , z ) = j μ2 ×
2 p τ
× [1 U n β z e ∑ν= 0 β 2 n K n n β x
jn β xx ] n = ν m ± 1 sinβ z z ,
wmI
A 1 z ( x , y , z ) = μ2 ×
2 p τ
∞ × ∑ [ U n e ν = 0 K n
jn β xx ] n = ν m ± 1 cosβ z z .
Общие решения уравнений для напряженностей элек- трического поля получим в следующем виде:
wmI j ω t E = ω e j ω t μ × 1 x 2 p τ2
× ∑∞ [1 U n β z e - jn β x x ] n = ν m ± 1 sin β z z , ν = 0 β2 nKnn β x
E
∞ × ∑ [ ν= 0
wmI j ω t
- j ω e j ω t µ 2 ×
2 p τ
1 U n e β 2 n K n
-jnβxx n=νm±1z.
Общие решения уравнений для напряженностей магнитного поля получим в виде
1 x
∞
× [1 U n ∑ ν = 0 β 2 n K n
wmI j ω t μ 2 H = e
2 p τμ1 e - jn β xx ] n =ν m ± 1 cos β z z ,
∞ × ∑ [ ν = 0
H1 =jwmIejωtμ2× y 2pτ μ1
1 U n n β x +β z e - jn β x x ] β 2 nKnn β x n =ν m ± 1
cos β zz ,
H 1 z =- jwmIe j ω t μ2 ×
2 p τμ1
∞ ′
∑ [1 U n e - jn β xx ] n =ν m ± 1 sin β z z ,
ν= 0 β 2 n K n
где
K n = (sh β 2 n ( a - b ) + β 0 n µ 2)ch β 1 n b + β 2 n µ 0
+ ( β 0 n µ 1sh β 2 n ( a - b ) +
β 1 n µ 0
+ β 1 n µ 2ch β2 n ( a - b ))sh β2 nb , β 2 n µ 1
Un = ch β1 ny + β 0 n µ 1sh β1 ny , β 1 n µ 0
-
β 0 n = 'j n 2β x 2 + β z 2 + j ω n μ0γ0,
-
β 1 n = J n 2β x 2 + β z 2 + j ω n μ1γ1 sn ,
-
β 2 n = V n 2β x 2 + β z 2 + j ω n μ2γ2.
Для каждой гармоники будет свое скольжение, поскольку скорость распространения поля, соответствующего различным гармоникам, различна.
Для оценки линейного двигателя решающее значение имеет тяговое усилие, т. е. сила, действующая на подвижный элемент в направлении движения главного поля.
F = ∫∫∫ ( J × B ) dV . (25)
V
Принятый метод определения дифференциальных параметров электромагнитного поля позволяет получить аналитические зависимости всех этих параметров в функции геометрии и нагрузки ЛАД с произвольным числом фаз. Результаты расчетов, выполненные для номинального режима при пересчете параметров ЛАДПП при сохранении потребляемой мощности, представлены на рис. 3.
Увеличение числа фаз приводит к улучшению качества установившихся электромагнитных процессов и ме- ханических характеристик двигателя при неизменном исполнении вторичного элемента.
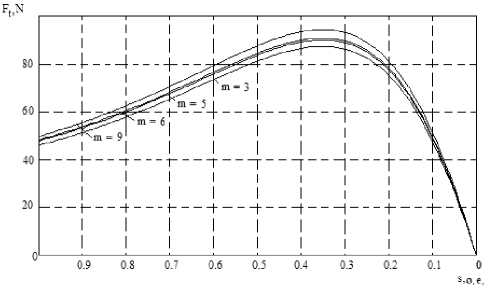
Рис. 3. Электромеханические характеристики для различных m
Тяговое усилие девятифазной машины увеличивается на 8,7 % по сравнению с трехфазной. При дальнейшем увеличении числа фаз улучшение характеристик незначительно.
Тяговое усилие создается лишь теми гармониками токов статора и вторичного элемента, которые участвуют в формировании тягового усилия, т. е. в обмене энергии между статором и вторичным элементом ЛАД. С увеличением числа фаз системы возрастает частота, а следовательно, уменьшается амплитуда как синхронных гармоник ЭДС и токов, так и пульсаций тягового усилия.
Также расщепление многофазной системы на симметричные подсистемы существенно улучшает качество установившихся электромагнитных процессов в ЛАД, так как из спектров фазных токов исключаются гармоники, кратные числу фаз в симметричной подсистеме. Исключаемые гармоники являются асинхронными (если число фаз нечетное) и сквозными (если число фаз четно-нечетное). Например, при расщеплении систем с числом фаз, кратным трем, на симметричные трехфазные подсистемы из спектров исключаются гармоники, кратные трем.
