Усовершенствование системы управления якорного устройства

Автор: Тараненко С.В.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 8 (26), 2017 года.
Бесплатный доступ
В статье анализируется работа электропривода якорного устройства морского судна, моделируется управление с использованием нечёткой логики и выработаны рекомендации по усовершенствованию. Статья посвящена улучшению качества работы якорного устройства морского судна, в том числе, при повышении нагрузки на электрическом приводе.
Электропривод, система управления, электромагнитный момент, якорное устройство
Короткий адрес: https://sciup.org/140272137
IDR: 140272137
The improvement of the management of anchor devices
The article analyzes the operation of the anchor device of a marine vessel, the control is modeled using fuzzy logic and made recommendations for improvement. The article is devoted to improve the quality of the anchor device marine vessel, including, with increasing load on the electric actuator.
Текст научной статьи Усовершенствование системы управления якорного устройства
В настоящее время невозможно представить морское судно без его широкой электрификации. В числе потребителей электроэнергии на судне: средства, обеспечивающие навигацию и управление судном, многочисленные приводы механизмов, обслуживающих силовую установку судна, приводы палубных механизмов, многочисленные устройства, обеспечивающие нужды экипажа. Среди них, немаловажное место занимает якорное устройство.
Якорные машины служат для подъема якорной цепи и якоря из воды. Подъем цепи осуществляется звездочкой, представляющей собой диск, вращающийся с валом машины от электрического привода. Звездочка имеет гнезда, соответствующие форме и размеру звена цепи. В эти гнезда входит звено, и при вращении звездочки цепь выбирается. Якорные машины могут быть двух систем, различающихся конструктивным положением вала, на котором закреплена звездочка. У шпиля ось вала расположена вертикально, и звездочка вращается в плоскости палубы. Конструктивно шпиль выполняется так, что привод, вращающий вал, располагается под палубой, на палубе остается только звездочка и выше ее барабан-турачка для намотки тросов при их выбирании. У брашпиля ось вала горизонтальная, и звездочка вращается в плоскости, перпендикулярной палубе. Вся конструкция брашпиля и приводная машина расположены на палубе и занимают на ней много места.
Электропривод якорного устройства должен соответствовать требованиям Морского регистра, а именно, мощность приводного двигателя якорного механизма должна обеспечивать непрерывное выбирание в течение 30 мин одной якорной цепи с якорем нормальной держащей силы со скоростью не менее 0,15 м/с. Кроме этого, при подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0,17 м/с. Рекомендуется скорость втягивания якоря в клюз не более 0,12 м/с. Для отрыва якоря от грунта привод якорного механизма должен обеспечивать в течение двух минут создание в цепи на одной звёздочке тягового усилия не менее 1,5 от расчетного.
Опыт показывает, что большое количество поломок брашпилей и выхода из строя электродвигателей происходит по причине их перегрузки. Перегрузка возникает из-за увеличения интенсивности работы выше расчётной, обрыва одной фазы питающей сети, ухудшение вентиляции, неисправностей редуктора, тормоза.
Суммарное влияние “вредных” факторов на качество работы электропривода возможно минимизировать применением в системе управления аппарата нечеткой логики.
Суть задачи управления электропривода состоит в своевременном торможении и остановки якорь-цепи, начиная с момента, когда достигается заданное расстояния So при начальной скорости Vo. Управление производится прямопропорционально изменением величины мощности двигателя P : чем больше P , тем больше угловая скорость двигателя to , тем быстрее движется объект, скорость V увеличивается. Если P <0, то скорость уменьшается, достигает нуля и может стать отрицательной: объект начнёт перемещаться в обратном направлении.
В соответствии с этим уравнения движения объекта имеют вид:
ds ( t ) dv ( t )
= ks • v(t); M = kTp • v(t) + P, dt dt где ks - коэффициент передачи редуктора от двигателя к колёсам; кТр -коэффициент трения; M - масса движущегося объекта; s(t) - расстояние, проходимое объектом от начального положения s0, соответствующего моменту начала процесса торможения и остановки; v(t) - скорость движения объекта.
Для реализации алгоритма Мамдани [3] введем две входные переменные: расстояние до точки остановки (или длина якорь-цепи) и скорость движения, а также одну выходную переменную - мощность двигателя. Для входных переменных определим два нечётких множества: «малое расстояние до точки остановки» SS, «малая скорость» VS и «большое расстояние до точки остановки» SP, «большая скорость» VP. На втором этапе (фазификации) присвоим входным переменным функции принадлежности:
-
- «малое расстояние до точки остановки» ц 55 ( 5 ) =-------- -;
1 + k $s " 5
-
- «большое расстояние до точки остановки» ц 5p ( 5 ) =---—.———^,
” I I - k 5p A 5 a sp )
где ks = 3 • 10-3, km = 50, am = 0,067 . ss spsp
А также для скорости:
1 + k vs • v 2
-
- «малая скорость» ц v5 ( v ) =
1 + e - k vp " ( v - a vp )
-
- «большая скорость» ц vp ( v ) =
где kvs 1 , kvp 1 , avp
Для мощности двигателя определим следующие нечёткие множества с функциями принадлежности:
-
- PN «большая отрицательная мощность» ц pn (p) =--------у;
1 + kpn " ( p + a pn )
- PZ
«мощность около нуля» цп„ (p) = pz
1 + kpz • p
- PS
- PP
«малая отрицательная мощность» ц p5 ( p ) = 2 ;
1 + k p5 " ( p + a p5 )
«большая положительная мощность» ц pp ( 5 ) =---
1 + e
- k pp • ( 5 - a pp ) ,
где kD = 8 • 10 -7, aD п= 2 • 103, kD = 2 • 10-6, kD = 6 • 10-6, aD = 2 • 102, pn pn pz ps ps kpp = 3 • 10-3, app = 2 • 103.
В результате расчетов получим поверхность управления электроприводом якорного устройства, как показано на рисунке.
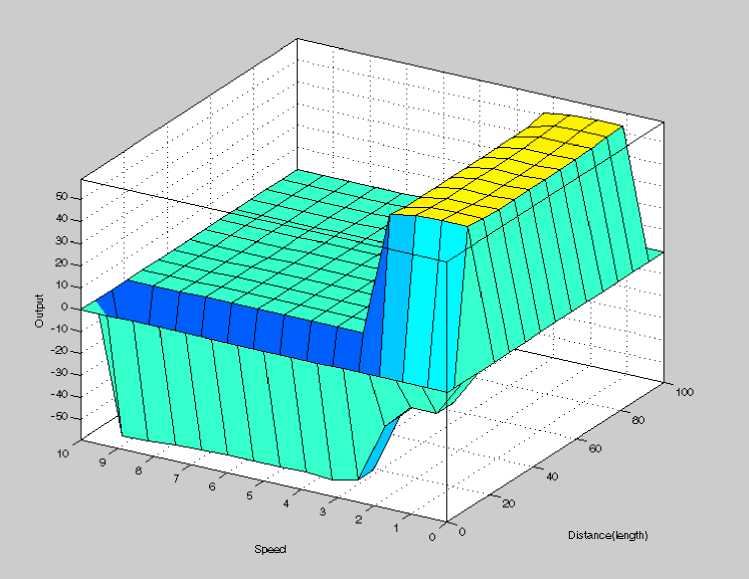
Рисунок. Поверхность управления электроприводом якорного устройства.
Для реализации этого метода управления необходимо в цепь управления ввести контроллер с нечеткой логикой. Это даст возможность уменьшить воздействие перегрузок на работу электрического привода, но увеличит временные факторы работы системы в целом.
Список литературы Усовершенствование системы управления якорного устройства
- Фрид Е.Г. Устройство судна: Учебник. - 5-е изд., стереотип: - Л.: Судостроение, 1989. - 344 с.
- Дьяконов В. МАTLAB: учебный курс. СПб: Питер, 2001.- 560 с.
- Александр Леоненков.Нечеткое моделирование в среде МАTLAB и fuzzyTECH. Санкт-Петербурr «БХВ-Петербурr». 2005 г., 736 с.
