Устойчивость широтно-импульсного стабилизатора в режиме прерывистых токов

Автор: Ловчиков Анатолий Николаевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 5 (45), 2012 года.
Бесплатный доступ
На основе предложенного автором нового подхода к анализу и синтезу широтно-импульсных систем исследуется динамика широтно-импульсного стабилизатора напряжения в наиболее сложном режиме прерывистых токов.
Широтно-импульсный стабилизатор, режим прерывистых токов
Короткий адрес: https://sciup.org/148176974
IDR: 148176974 | УДК: 681.5(075.8)
Stability of pulse-width modulation stabilizer in mode of intermittent currents
In its article, on the basis of the offered by the author new approach to analysis and synthesis of pulse-duration systems, the dynamics of pulse-width modulation stabilizer of tension in the most complex run of pulsating currents is investigated.
Текст научной статьи Устойчивость широтно-импульсного стабилизатора в режиме прерывистых токов
В работе [1] предложен метод исследования, позволяющий успешно решать задачи анализа устойчивости и синтеза систем с широтно-импульсной модуляцией. Предложенная методика может быть распространена на случай, когда в широтно-импульсной системе имеется дополнительная существенная нелинейность.
Импульсный стабилизатор напряжения (ИСН) состоит из транзисторного ключа, управляемого широтно-импульсным модулятором (ШИМ), первичного источника напряжения Е и источника опорного напряжения U оп , LC -фильтра ( r – активное сопротивление дросселя), сопротивления нагрузки R и диода, включающегося в работу при закрытии транзисторного ключа (рис. 1). В процессе работы сопротивление нагрузки и напряжение источника изменяются. Система в этом случае может работать в двух режимах: при непрерывном и прерывистом изменении тока дросселя фильтра I 2. Анализу устойчивости системы в первом случае посвящено достаточно большое количество работ, в частности [1], и методика решения этой задачи известна. Второй, более сложный случай, в литературе рассмотрен только с энергетических позиций. Динамические характеристики этого режима практически не исследованы.
Рис. 1
питания. ШИП генерирует ЭДС Е ШИП , равную Е при открытом ключе и нулю при закрытом.
В этой схеме (см. рис. 2) так же, как и в исходной, напряжение на входе фильтра при условии идеальности характеристик диода в режиме прерывистых токов дросселя U 1 = Е , когда транзисторный ключ открыт; U 1 = 0 при закрытом ключе и I 2 ≠ 0; U 1 = U 2 при I 2 = 0.
Используем далее схему рис. 2. Разложим напряжение Е ШИП в ряд Фурье, ограничившись членами ряда, определяющими постоянную составляющую и первую гармонику. При этом для упрощения выражений без потери достоверности получаемых результатов считаем, что ось ординат проходит посередине импульса. Тогда функция, характеризующая заданную последовательность импульсов, является четной и при разложении в ряд Фурье b K = 0 [2]. Следовательно, в нашем случае надо найти коэффициенты а 0 и а 1 :
1 nT -τ 2
a 0 = ∫ Edt = E γ ,
T -τ 2
В данной статье на основе предложенного в [1] подхода к анализу устойчивости систем с широтноимпульсной модуляцией рассматривается устойчивость ИСН в режиме прерывистых токов дросселя I 2 .
Постановка задачи. Схему, изображенную на рис. 1, можно представить в виде гипотетической схемы (рис. 2), в которой широтно-импульсный преобразователь (ШИП) совмещает в себе действия ШИМ, транзисторного ключа и первичного источника
a 1
2 nT -τ2 2 π
E cos tdt =
TT
-τ 2
2 E
sin πγ , π
где τ – время открытого состояния ключа на периоде следования импульсов; Т – период следования импульсов; γ = τ / Т – относительная длительность импульса. Поскольку τ в процессе работы стабилизатора изменяется во времени, то можно принять, что τ ( t ) и Y ( t ) являются функцией времени.
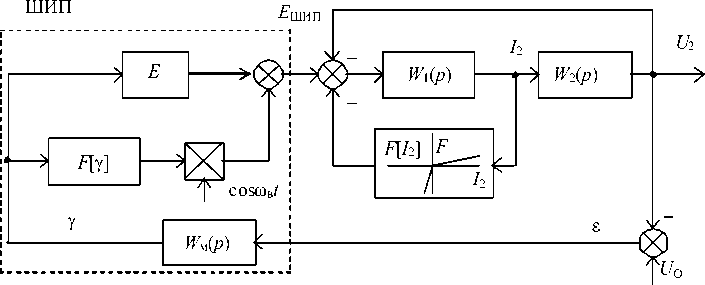
Рис. 3
С учетом вышеизложенного система дифференциальных уравнений, описывающая процессы в стаби лизаторе, примет вид
LI 2 ( t ) = E Y ( t ) + — sin( nY ( t )) cos ( 2 П t | - п I T )
- U 2( t ) - ri 2( t ) - F [ 1 2( t ) ] , (1)
CU 2 ( t ) = 1 2 ( t ) - YU 2 ( t ),
Y(t) = k(UоП - U2(t)) , где Y = 1/R; k - коэффициент передачи модулятора, который в данном случае принят астатическим. На основании (1) строим структурную схему (рис. 3), где передаточные функции W1(p) = 1/(Lp + r), W2(p) = 1/(Cp + Y), WM(p) = k/p, нелинейная функция F[12(t)] определяет нелинейность диодного типа с коэффициентами k1 в открытом состоянии диода, когда
1 2 > 0, и к 2 - в закрытом, F [ у ] = —sin ( лу ( t ) ) . п
Задача исследования устойчивости системы заключается в определении условий возникновения автоколебаний при наличии постоянной составляющей и вынужденных колебаний юв. Вынужденные высокочастотные колебания не оказывают воздействия на переменную у , так как значительно ослабляются фильтром и самим модулятором. Решение ищем в виде
I 2 = I 2 + I 21 + I 2» , U 2 = U 0 + U 21 + U 2» , Y = Y o + Y 1 ,
Решение (2) ищем в виде
12» = Ав sin (toBt + ф), где юв = 2п/Т; Ав - амплитуда вынужденных колебаний. Изобразим нелинейность F[12] (рис. 4).
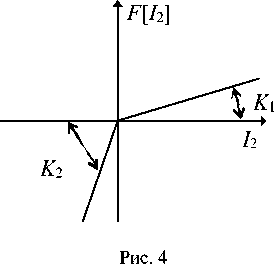
Нелинейность F [ 1 2 ] после гармонической линеаризации определится равенством
F [ 1 2 ] = F 0 [ А в , 1 20 + 1 21 ] + q ( А в , 1 20 + 1 21 ) 1 2» . (3)
Коэффициент q ( А в , I 2 + I 21 ) = 0, так как нелинейность F [ 1 2 ] однозначна. Обозначим 1 20 + 1 21 = 1 20. Выражения для F 0 и q имеют вид, представленный на рис. 4 [ 3 ] :
F 0
K + K K - K
1 , 2 I 20 + —----2 х
2 п где 12°, U0, у0 - постоянные составляющие; 121, U21,
Y 1 - переменные составляющие, характеризующие автоколебательный режим; 1 2 » , U 2 » - переменные, характеризующие вынужденные колебания в системе.
Метод решения. Так как частота автоколебаний много меньше частоты вынужденных колебаний, уравнение для определения вынужденных колебаний в системе принимает вид
Q ( p ) I 2* + R ( p ) F [ I 2 ] = R ( p ) F [ y ] cos ® в t , (2)
х 1 20arcsin^ ° + А в 1
k + к к q = —1---2 + —
-
K2L
п
I 20
А в ,
,
arcsin I 20 + I 20. 1
Г 2
I 20
.
где Q ( p ) = LCp 2 + ( LY + Cr ) p + 1 + rY , R ( p ) = Cp + Y .
В уравнение (2) подставляем второе слагаемое из (3), где q определяется из второго уравнения (4). Параметры А в и ф вынужденного автоколебательного режима определяются из равенств
A B = F [ Y ] 2
____Rj A2____
I Q ( j to B ) + q ( I 20 , A b ) R ( j to B )|2
ф П - arg [ Q ( j to B ) + R ( j to B ) q ( I 20 , A B ) ] + + arg [ R ( j to B ) ] .
Выражения (5) определены с учетом
F [ y ] cos to B t = F [ y ] sin I to B t +П j =
F M
AB
f n)
, , sin ф— f п) Г 2 J.
cos ф| ф— I------- -t
I 2 j to B
I 2* .
В результате решения (5) можно определить зависимость F 0( 1 20, A в) от F[ y ], т. е. F 10 ( 1 20, F [ y ] ) , которая в дальнейшем используется для определения автоколебательного режима и решения уравнения для постоянных составляющих. Для этого F 10 ( 1 20, F [ y ] ) представим в виде
F ( 1 20 , F [ y ] ) = Ф 0 ( 1 200 , F 0 [ Y ] ) + Ц 1 1 21 + Ц 2 A 1 , (6)
где 1 200 ,F 0 [ y ] - постоянные составляющие; A 1 - ам-
плитуда первой гармоники вынужденных автоколеба-
d F 0
ний; ц 1 = , ц 2 =
^ 1 20 1 200 , F 0 [ Y ]
d F 10
.
д F [ Y ] 1 00 , F 0 [ y ]
Нелинейность F [y] можно представить через коэффициенты гармонической линеаризации относительно автоколебаний в системе:
q y( ay ,Y0 ) = 4EsinnY0 J1 H ) • nay где J0 (nA), J1 (nA) - функции Бесселя первого рода соответственно нулевого и первого порядка.
C учетом (6) и (7) уравнение для определения параметров автоколебательного режима примет вид
N ( p ) + Ц 2 q y ( a y , Y 0 ) = 0, (9)
где
N ( p ) = E + kp [ 1 + Y ( p 1 + r ) ] +
+ k [ LY + C ( p 1 + r ) ] p 2 + kLCp 3 .
Уравнение для постоянных составляющих:
Ey0 - Uon (1 + rY) - Ф0 [120, Ф0 (A,, Y0 )] = 0 .(10)
Из (9) определяются параметры автоколебательного режима:
2 = 1 + Y(^1 + r) to K = qy(ay,,») = -E-k[LY + COh + r)M .(11)
Ц 2
Следует отметить, что вместо Fy ( 1 20, F [ y ] ) , решая (5) и (10) совместно, можно определить нелинейную зависимость F 2 0 ( 1 20, , ) . Тогда, применив к ней разложение в ряд Тейлора и ограничившись первыми членами, можно найти
F 20 ( 1 20 , y ) = Ф 02 ( 1 20 , Y 0 ) + П 1 1 21 + П 2 Y 1 , (12)
F [ y ] = Ф 0 ( A , Y 0 ) + q y ( a y , Y 0 ) Y i . (7)
В (7) предполагается, что решение задачи определения автоколебательного режима в системе ищется в виде
Y = Y 0 + Y 1 = Y 0 + A Y sin to t .
Тогда
F 0 [ y ] = Ф 0 ( a y , Y 0 ) , A i = q y ( a y , Y 0 ) Y i ,
d F 0
где П1 = — , d120 10,,0
d F 20
.
d, ,0 v0
I 2 , Y
В этом случае уравнения, аналогичные (10) и (11), примут вид
E y 0 - U оп ( 1 + rY ) - Ф 0 ( 1 0 , , 0 ) = 0, (13)
2 1 + Y (n + r)
to K = —L H • (14)
П 2 = E - k [ LY + C ( n 1 + r ) ] to K .
где параметры автоколебательного режима определяются формулами
Ф 0 ( A Y , Y 0 ) = "2 П J 2E sin ( n ( y 0 + A Y sin v ) ) d V ,
1 2П 2E qy (ay , Y0) = -— J — sin(n (y0 + ay sin v)) sin VdV
Проведя интегрирование в (8), получим
-о/ . 2 E sinnY0r \
Ф 0 ( a y , Y 0 ) = ^ J 0 (n A ) .
Преобразованием (12) проведена обычая линеаризация нелинейности F [ , ]. Это можно делать только при значении , , близком к нулю или единице. Провести же аналитически гармоническую линеаризацию F\ ( 1 20, , ) затруднительно. Кроме того, как показывают исследования, характеристика F 0 ) ( 1 20, F [ y ] ) в широком диапазоне изменения 1 20 и F [ y ] близка к линейной. Так что погрешность от преобразования (6) гораздо меньше, чем (12). Но при малых и больших значениях , можно пользоваться уравнениями (12)–(14).
Нахождение граничных значений параметров фильтра, определяющих области устойчивости, производилось по уравнениям (11). Зависимости относительного значения постоянной времени выходного фильтра LC / T приведены на рис. 5 и 6, где Т – период частоты преобразования, от относительного изменения напряжения на источнике U 1 U 1ном, где U 1 но м = 1,5 ' U 1опт. Линии 1, отражающие границы устойчивости для режима непрерывных токов дросселя, определялись по линеаризованной системе уравнений (1), линии 2 по (11). Линии 3 отражают значения относительной постоянной времени фильтра, обеспечивающего заданный коэффициент пульсации.
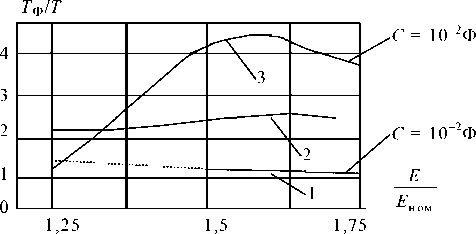
Рис. 5
Таким образом, графики показывают, что режим прерывистых токов дросселя фильтра расширяет область устойчивости. С возрастанием емкости выходного конденсатора и уменьшением сопротивления нагрузки увеличивается граничное значение постоянной времени фильтра. Однако даже при достаточно большом значении С и номинальной нагрузке затруднительно обеспечить низкий уровень пульсации выходного напряжения и одновременно добиться устойчивости стабилизатора при астатическом управлении.
T Ф / T
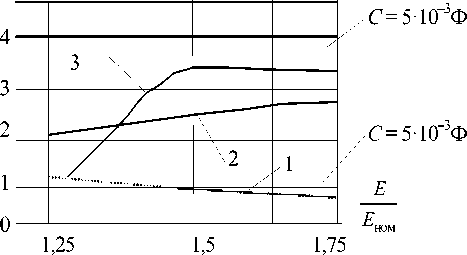
Рис. 6
