Устройства для преобразования движения в структуре диады механической колебательной системы

Автор: Елисеев Сергей Викторович, Орленко Алексей Иванович, Нгуен Дык Хуинь
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 (90) т.17, 2017 года.
Бесплатный доступ
Введение. Рассматриваются возможности создания новых подходов в оценке динамических свойств механических колебательных систем. Цель исследований заключается в разработке метода построения математических моделей механических колебательных систем с несколькими степенями свободы, основанного на представлениях о системообразующих фундаментальных возможностях диад как структурных образований, определяющих особенности состояний исходной системы в целом. Материалы и методы. Используются подходы и приемы структурного математического моделирования, в рамках которых механической колебательной системе сопоставляется эквивалентная в динамическом отношении структурная схема системы автоматического управления. Оценка динамических свойств и вводимых дополнительных связей основана на применении передаточных функций, амплитудно-частотных характеристик и технологий частотного анализа. Результаты исследования. Доказаны возможности изменения динамических свойств систем путем введения дополнительных связей, реализующих преобразования состояний во взаимодействиях элементов на основе эффектов двойного дифференцирования. Показаны возможности изменений, которые могут быть инициированы устройствами для преобразования движения. Обсуждение и заключения. Разработан метод построения математических моделей диад и технология оценки их динамических свойств. Предложены физически реализуемые схемы конструктивно-технических решений на основе устройств для преобразования движения.
Диада, устройство для преобразования движения, структурная схема, передаточная функция
Короткий адрес: https://sciup.org/14250299
IDR: 14250299 | УДК: 62.752, | DOI: 10.23947/1992-5980-2017-17-3-46-59
Motion translation devices in dyad structure of mechanical oscillatory system
Introduction. The possibilities of creating new approaches to the evaluation of the dynamic properties of mechanical oscillation systems are considered. The research objective is to develop a method for constructing mathematical models of mechanical oscillatory systems with several degrees of freedom based on the concepts of system-forming fundamental capabilities of dyads as certain structural formations that determine features of the states of the initial system as a whole. Materials and Methods. Approaches and techniques of the structural mathematical modeling are used, within which a mechanically oscillating system is compared with a dynamically equivalent structural diagram of an automatic control system. Estimation of the dynamic properties and introduced additional couplings is based on the application of transfer functions, amplitude-frequency characteristics, and frequency analysis technologies. Research Results. The changeability of the dynamic system properties through introducing additional constraints that realize the transformation of states in the interactions of elements on the basis of double differentiation effects is proved. The possibilities of changes that can be initiated by devices for converting motion are shown. Discussion and Conclusions. A technique for building mathematical models of dyads, and a technology for estimating their dynamic properties are developed. Physically realizable schemes of the design engineering solutions based on motion translation devices are proposed.
Текст научной статьи Устройства для преобразования движения в структуре диады механической колебательной системы
Введение. Вопросы о расширении элементной базы механических колебательных систем давно привлекают внимание и неоднократно рассматривались с позиций возможности развития обобщенных подходов в системах многофункционального назначения, что нашло отражение в работах по структурному математическому моделированию [1-3]. В последние годы наметился интерес к детализации представлений о принципах динамических аналогий и формах их реализации в теории цепей и в различных приложениях. Интерпретации механических колебательных систем на основе аппарата теории автоматического управления рассмотрены в работах, ориентированных на решение задач динамического синтеза виброзащитных систем [4-6], что инициирует внимание к поиску и детализации представлений о взаимодействиях типовых элементов. В частности, интерес представляет рассмотрение диад как типовых фундаменто-образующих структур линейных механических колебательных систем. Вместе с тем диады, как структуры, обладающие двумя степенями свободы, могут, в свою очередь, содержать не только упругие и массоинерционные элементы обычного вида, но и типовые элементы, реализующие функции преобразования движения [1, 3, 5]. В настоящей работе рассматриваются особенности динамических свойств диад в линейных механических колебательных системах цепного типа, содержащих в своем составе устройства для преобразования движения.
-
I. Общие положения. Постановка задачи исследования. Рассмотрим механическую линейную колебательную систему с двумя степенями свободы, продемонстрированную на рис. 1. На систему действуют гармонические внешние силы Q 1 и Q 2, приложенные непосредственно к массоинерционным элементам m 1 и m 2. В системе имеются упругие элементы с жесткостями k 1 , k 2, к 3, а также устройство для преобразования движения с приведенной массой L [1, 5].
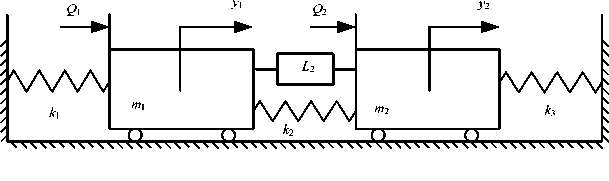
Рис. 1. Принципиальная схема механической колебательной системы, содержащей диаду ( m 1 , к 2 , m 2 , L )
Fig. 1. Block diagram of mechanical oscillatory system containing dyad (m 1 , k 2 , m 2 , L)
Используя технологии структурного математического моделирования [3, 5], основанные на применении уравнений Лагранжа 2-го рода и последующих преобразований Лапласа, получим в качестве модели структурную схему эквивалентной в динамическом отношении системы автоматического управления (рис. 2).
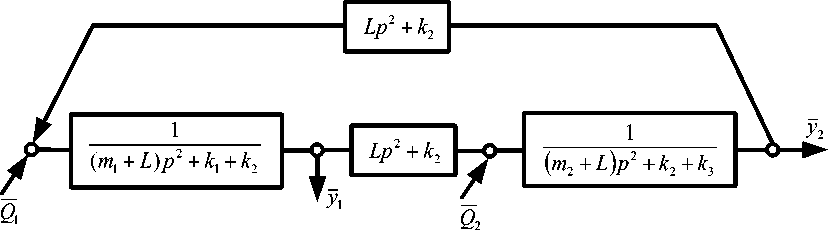
Рис. 2. Структурная схема системы с устройствами преобразования движения
Fig. 2. Structural diagram of system with motion translation devices
Рассматриваемая система обладает линейными свойствами и совершает малые колебания относительно положения статического равновесия. На рис. 2 приняты следующие обозначения: p = j и — комплексная переменная; значок <-> соответствует изображению переменной по Лапласу. Понятие о приведенной массе L устройства для преобразования движения более подробно рассматривается в [7]. Отметим, что устройство для преобразования движения (УПД) может быть реализовано в различных конструктивно-технических формах, например, в виде рычажных, зубчатых или винтовых несамотормозящихся механизмов.
Машиностроение и машиноведение
Используя структурную схему (рис. 2), можно получить передаточные функции исходной системы, полагая что y и у 2 являются выходными сигналами, а внешние воздействия Q 1 , Q 2 — входными. Принимая для упрощения, что Q 1 + 0 ( Q 2 = 0), запишем передаточные функции:
где
W (р) = y 1 = m 2 Р 2 + L P 2 + k 2 + k 3 ;
Q i
W 2( Р ) = £ Q i
A ( Р )
Lp 2+ k 2 _ A ( Р ) ’
A ( p ) = ( m 1 p 2 + Lp 2 + k 1 + k 2)( m 2 p 2 + Lp 2 + k 2 + k 3) - ( Lp 2 + k 2)2
— характеристическое частотное уравнение системы.
Кроме передаточных функций (1), (2) в рассмотрение вводится передаточная функция межпарциальных связей:
W 12 ( p ) =
У 2 = Lp 2 + k 2
y m 2 p 2 + Lp 2 + k 2 + k 3
В случае одновременного действия двух сил Q 1 и Q 2 возможно использование принципа суперпозиции [8]. Отметим, что простые формы преобразований реализуются в случаях, когда обе внешние силы имеют одну частоту и действуют синхронно.
Задача исследования заключается в разработке метода оценки динамических свойств диады с устройством для преобразования движения и использования динамических эффектов для режима прикладных задач динамики вибрационных технологических машин.
-
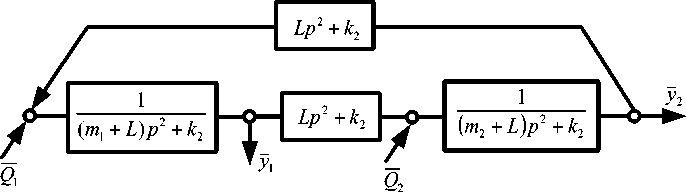
II. Диада и ее динамические свойства. Диада рассматривается как структурное образование из типовых элементов с передаточными функциями инерционных звеньев m i , m 2, упругого звена k 2 и УПД. Отметим, что диада, как некоторое структурное образование, находится «в изоляции» от связей с опорными поверхностями ( k 1 = 0, k 3 = 0). При этом не учитываются силы сопротивления со стороны опорной горизонтальной поверхности.
Структурная схема диады и некоторые формы её преобразований приведены на рис. 3, а , б , в .
а)
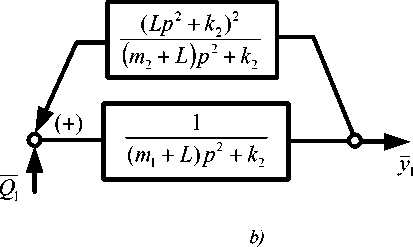
Рис. 3. Структурная схема диады: а) общий вид; b) структурная схема диады при исключении координат у 2 ; с) структурная схема системы с выделением объекта вибрационной защиты m i
c)
Fig. 3. Dyad structural scheme: a) - general form; b) - dyad structure when excluding coordinates у 2 ;
c) – system structural scheme with allocation of vibration protection object m 1
Передаточные функции диады на основе использования структурных схем (рис. 3, а, б, в ) принимают вид:
W„ ( p )- 11 - m ■ p ’ + Lp ‘ + k ■ , (5)
-
1 Q 1 4( p )
w .( p )= й- = k , 2 Q 1 A 1 ( p )
(6)
W 2 д ( p ) = = Lp 2 + k 2 , ,
(7)
Z m 2 p + Lp + k 2
где
A1 ( p ) = ( m 1 p 2 + Lp 2 + k 2)( m 2 p 2 + Lp 2 + k 2) - ( Lp 2 + k 2)2 (8)
— характеристическое частотное уравнение диады.
|
Выражение (8) может быть упрощено и приведено к виду: p 4[ m 1 m 2 + L ( m 1 + m 2)] + p 2 k 2( m 1 + m 2) = 0 . (9) |
Из (9) следует, что система имеет циклическую координату. Это обеспечивает возможность рассмотрения диады в рамках прямолинейного поступательного перемещения как некоторого установившегося движения. При этом в соответствии с характеристическим уравнением будет верно равенство:
p 2{[ m 1 m 2 + L ( m 1 + m 2)] p 2 + k 2( m + m 2)} = 0 . (10)
Из (9), (10) очевидно, что диада имеет одну частоту собственных колебаний ю2д = 0. Вторая частота соб- ственных колебаний диады определяется выражением:
2 k 2 ( mx + m 2)
ю2 д =--------- 7", ---------7
m 1 m 2 + L ( m + m 2)
.
Если считать, что диада имеет без УПД приведенную массу
mm ш = —1—2— mnp , , m + m 2
то с учетом (11) приведенная масса диады с УПД составит
m v тт = m + L . пр УПД пр
Введение УПД в диаду уменьшает частоту собственных колебаний и вид амплитудно-частотных характеристик (АЧХ) системы. На рис. 4, а , б приведены для сравнения АЧХ обычного вида и АЧХ с введенными УПД.
а )
Машиностроение и машиноведение
b )
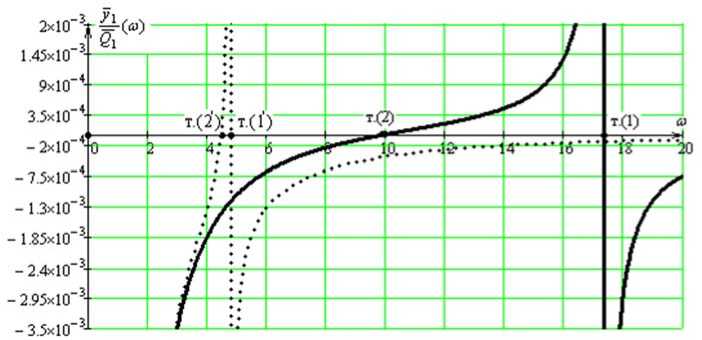
Рис. 4. Амплитудно-частотные характеристики диады: а — АЧХ по координате y 1 ; b — АЧХ по координате y 2 ( — при L = 0,

— при L = 80 кг)
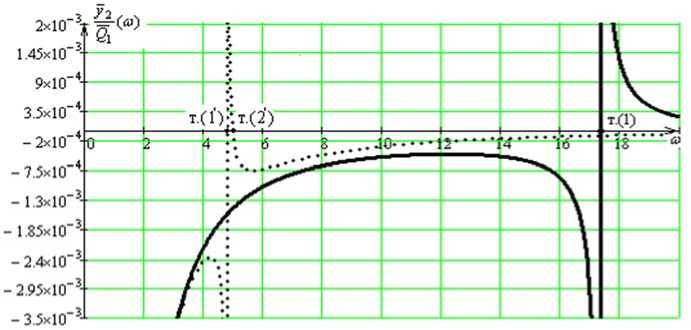
Fig. 4. Dyad amplitude-frequency characteristics: а – AFC in coordinate y 1 ; b – AFC in coordinate y 2 ( – at L = 0,
– at L = 80 kg )

Для модельной задачи принято, что m1 = 10 кг, m2 = 20 кг, k2 = 2000 Н/м; приведенная масса L принимает два y значения — L = 0 и L = 80 кг. Графики амплитудно-частотных характеристик ^-(ю) при L = 0 и L = 80 кг имеют от-Q1
личия. Частоты собственных колебаний определяются положением точек (1) и (1') на оси абсцисс. При увеличении L y значение частоты собственных колебаний уменьшается. При L = 0 график ^-(ю) пересекается с осью абсцисс в точке Q1
-
(2) . При увеличении L эта точка перемещается в точку (2') (рис. 4, а ). Характерно, что при увеличении L значения частоты динамического гашения колебаний и частоты собственных колебаний сближаются.
y
Графики АЧХ — (ю) (рис. 4, б) при L = 0 и L = 80 кг имеют характерные точки (1) и (1) на оси абсцисс, опре- Q 1
деляющие значения частот собственных колебаний. При L = 0 график y2- (ю) не имеет пересечений с осью абсцисс.
Q 1
Вместе с тем график y 2 (ю) при L = 80 кг имеет пересечение с осью абсцисс в точке (2'), что свидетельствует о воз- Q 1
никновении режима динамического гашения колебаний. Таким образом, параметр УПД, называемый приведенной массой L , может существенно изменять свойства диады и влиять на особенности движений системы в целом.
Отметим также, что точка (2') на рис. 4, б находится правее точки (1'), что свидетельствует о наличии особых режимов динамического взаимодействия элементов диады. Для диады без УПД АЧХ имеют вид, характерный для систем с одной степенью свободы. При этом полагается, что циклическое движение может на данном этапе исследования не рассматриваться.
С учетом УПД движение по координате y 1 имеет частоту динамического гашения:
2 k 2
ю 1 дин г m 2 + L
При этом частота собственных колебаний определяется выражением:
ю2 .. =-----k2 со6д Т mm L + —
m 1 + m 2
При частоте возмущения ю ^ ж , система «запирается» и W 1g ( p ) стремится к значению
m2 + L
Wig ( р ) = ;
р ^« m 1 m 2 + L ( m 1 + m 2)
По координате y 2 режим динамического гашения колебаний определится выражением:
2 k 2
ю 2 дин l ;
соответственно на высоких частотах получим:
W2 д(p) = p ^a>
L
m 1 m 2 + L ( m 1 + m 2 )
.
Таким образом, введение УПД привносит в диаду новые динамические эффекты. В частности, возможным становится динамическое гашение колебаний по координате y 2 (17), изменяются также значения парциальных частот диады и ее собственной частоты.
Передаточная функция межпарциальных связей с учетом УПД имеет вид, определяемый выражением (7), из которого следуют особенности динамических взаимодействий в межкоординатных связях y1 и y2 . Характерным является «обнуление» (7) или ситуация, когда y2 = 0, что не является возможным в диадах без устройств для преобразо- вания движения. При p ^ 0, соотношения амплитуд y^ = 1, а при p ^ да , y2 =
y 1
y 1
L
, что можно рассматривать как m 2 + L
форму проявления рычажных связей [9, 10].
Одновременное действие двух внешних силовых факторов не изменяет характеристическое частотное уравнение диады, но влияет на формы передаточных функций. Примем, что Q2 = aQ1, тогда wg (p) = y2
Q 1
W^ g ( p ) = y 2
Q 1
( m 2 + L ) p 2 + k 2 + a( Lp 2 + k 2)
A ( p )
[( m 1 + L ) p 2 + k 2]a + Lp 2 + k 2
;
W д ( p ) = y 2
y 1
A ( p )
[( mm + L ) p 2 + k 2]a + Lp 2 + k 2 ( m 2 + L ) p 2 + k 2 +a( Lp 2 + k 2)
;
.
При действии двух силовых факторов частоты собственных колебаний не изменяются. При этом изменяются частоты динамического гашения колебаний. По координате y 1 имеем:
Ю 1 динд
k 2 (1 + a ) m 2 + L (1 + a )
.
По координате y 2 соответственно получим:
® 2динд =
k 2 (1 + a )
a m 1 + L (1 + a )
.
Отметим, что одновременное действие двух силовых факторов без сдвига по фазе можно рассматривать как способ изменения параметров приведенной жесткости системы, а также как способ изменения приведенных масс системы.
Для случая ^Хдинд = су динд можно получить следующее уравнение связности:
k 2 (1 + a )
k 2 (1 + a )
m 2 + L (1 + a ) a m 1 + L (1 + a)’
откуда следует, что
m a = — m1
.
m
Если выполняется условие a = —-, то в системе реализуется особый динамический m 1
режим, при котором
y
^- = 1, что соответствует движению объекта по двум координатам как «единое целое», то есть имеет место синфаз- y 1
ное движение с одинаковыми амплитудами. Аналогичным образом могут быть получены и другие формы движений.
III. Использование энергетической функции. Если рассматривать диаду с УПД, то в системе координат y 1 , y 2 её кинетическая и потенциальная энергии определяются выражениями:
T = ;2 m 1 y 12 + 2 m 2 y 22 + J- L ( y 1 - y 2)2 ,
П = 2 k 2 ( У 2 - y 1 ) .
Частотная энергетическая функция может быть записана в виде:
Машиностроение и машиноведение
тогда
____________ k 2 ( У 2 — У 1 )2 _____________
( m i + L ) у2 + ( m 2 + L ) y 2 - 2 Ly i y 2 '
Введем понятие коэффициента связности координат:
i = У 2/ У 1 ,
(28')
ю 2 = k 2 ( i - 1)2
m1 + m 2 i 2 + L ( i - i)2
Рассмотрим, как влияет L на коэффициент формы связи координат i. Если УПД нет, то L = 0, а (29) примет вид:
12 = k 2 ( i — i)2 m i + m 2 i 2
Сравнивая с частотой собственных колебаний, определенной выше, получим: k 2( i - 1)2 = к 2
m1 + m 2 i2 m1 m 2 ’ m1 + m 2
откуда следует, что i =
m 1
m 2
Если в диаду ввести УПД, то (31) трансформируется к виду: k 2 ( i - 1)2 = k 2
m 1 + m 2 i + L ( i — 1) l + m 1 m 2
m 1 + m 2
откуда найдем, что значение i не зависит от L
i =
m 1
m 2
На рис. 5 приведены результаты решения уравнения (29) по определению значений коэффициента связности i при различных значениях L (в модельной задаче приняты: m 1 = 10 кг, m 2 = 20 кг, k 2 = 2000 Н/м, L = 0, 10, 20, 50 кг).
^(0;
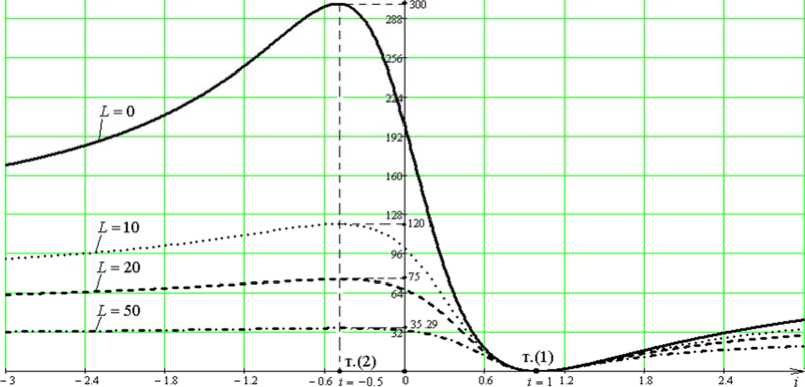
Рис. 5. Графики зависимости m 2 ( i ) при различных значениях L
Fig. 5. Dependency graphs m 2 ( i ) at different values of L
Из графиков на рис. 5 очевидно, что динамическое состояние диады не может находиться в форме колебаний, когда i = 1, поэтому все графики m2(i) при различных значениях L пересекаются в одной точке (1) на оси абсцисс (i = 1); при этом т2об = 0 при всех значениях L. В данном случае это означает, что система имеет циклическую координату, характеризующую установившееся равномерное прямолинейное движение. Вместе с тем все графики с различными значениями L имеют экстремальные свойства при i = -0.5, что следует из выражения (34). Таким образом, учет L (приведенная масса УПД) не приводит к изменению связности координат i, но при этом изменяются соответствующим образом значения частот собственных колебаний диады. При увеличении L частоты собственных колебаний диады уменьшаются (в пределе до нулевых значений), что связано с представлениями о получении очень низких частот при L → ∞.
При i = 0, что соответствует — = 1, частоты собственных колебаний определяются вышеприведенным выра- y 1
жением (29). При i → +∞ из (29) следует, что
-
2 = к.. ω
.
1 >■/ m 2
k
Отметим, что графики на рис. 5 при i → – ∞ будут также стремиться к пределу 2 , определяемому выра-m 2 + L жением (35), что соответствует парциальной частоте системы, состоящей из элементов m2, k2 и L.
Амплитудно-частотные характеристики (АЧХ) диады при внешнем силовом возмущении к элементу m 1 приведены на рис. 6, а , б , в , г , где значение приведенной массы L изменяется в пределах L = 0 (рис. 6, а ); L = 10 кг (рис. 6, б ); L = 20 кг (рис. 6, в ); L = 50 кг (рис. 6, г ).
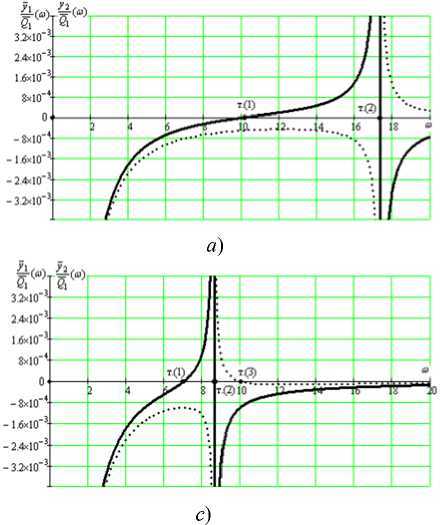
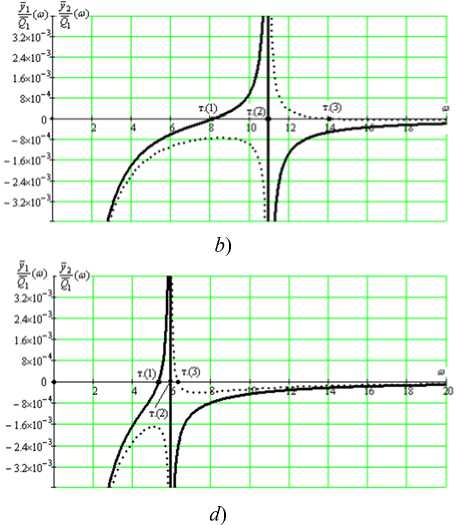
Рис. 6. Формы амплитудно-частотных характеристик диады при различных значениях приведенной массы устройства для преобразования движения L : а ) L = 0; b) L = 10 кг; c) L = 20 кг; d) L = 50 кг
(сплошная линия ( ) соответствует графику зависимости по координате y 1 ;
точечная линия ( ) соответствует по координате y 2 )
Fig. 6. Forms of dyad amplitude-frequency characteristics at different values of reduced mass of motion translation device L: а – L = 0; b – L = 10 kg ; c – L = 20 kg ; d – L = 50 kg (solid line ( ) corresponds to dependency graph in coordinate y 1 ;
dotted line ( ) corresponds to the one in coordinate y 2 )
АЧХ на рис. 6, а отображают динамические свойства без УПД при значениях параметров m1 = 10 кг, m2 = 20 кг, k2 = 2000 Н/м. В рассматриваемом случае система имеет одну частоту собственных колебаний (ω2 ≠ 0), которая определяется точкой (2) на оси частот. В движениях по координате y1 реализуется режим динамического гашения колебаний точки (1) на оси частот. Движение по координате y2 происходит без режима динамического гашения y колебаний, но АЧХ по координате y1 имеет характерную форму с наличием минимального значения 1 .
Q 1
Введение УПД с приведенными массами L = 0, 10, 20, 50 кг, что отображается на АЧХ, приведенных на рис. 6, приводит к появлению ряда новых динамических эффектов. Это связано с проявлениями режимов динамического гашения колебаний по координате y 1 . При этом значение частоты собственных колебаний ω 2 ≠ 0 сдвигается в область более низких значений (точка (1) на рис. 6). На графиках АЧХ при L ≠ 0 , частоты динамического гашения ко-
Машиностроение и машиноведение
лебаний (т. (3) на рис. 6, б , в , г ) сдвигаются в сторону расположения точки (2), определяющей частоту собственных колебаний. Отметим, что сближение частот динамического гашения колебаний и собственных колебаний не является приемлемым для решения ряда задач динамики из-за возможностей проявления свойств, характерных для форм неустойчивых движений [11].
IV. Возможности физической реализации диады с использованием рычажных механизмов. Рассмотрим пример реализации диады в структуре динамического корректора колебаний в виброзащитной системе с двумя степенями свободы. На рис. 7 рассматривается механическая колебательная система с двумя степенями свободы как расчетная схема некоторого технического объекта массой m 2 , который опирается на УПД рычажного типа. Такое устройство является стержнем, на одном конце которого размещен груз массой m 0 с возможностями изменения расстояния l 2 до точки вращения (точка В). В точке А (рис. 7) рычаг имеет связь в виде кинематической пары V класса (вращательная) с объектом защиты (АВ = l 1 ). Одновременно в точке В рычаг соединяется вращательной кинематической парой с промежуточной массой m 1 . В системе используются четыре упругих элемента с жесткостями k 1 , k 2 , k 3 и k 4 (рис. 7). Движение системы описывается в системе координат y 0 , y 1 , y 2 , связанной с неподвижным базисом; при этом положению объекта защиты m 2 соответствует координата y 2 , положению рычага — y 0 , промежуточной массы — y 1 . В качестве внешнего возмущения рассматриваются гармонические колебания опорной поверхности z ( t ). Система обладает линейными свойствами и совершает малые колебания относительно положения устойчивого статического равновесия.
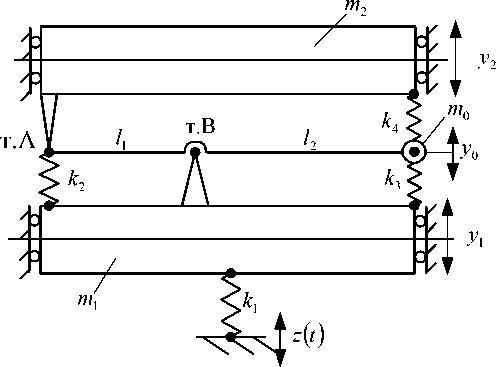
Рис. 7. Принципиальная схема виброзащитной системы технического объекта с УПД
Fig. 7. Block diagram of vibration protection system of technical object with motion translation device
В системе координат y 1 и y 2 выражения для кинетической и потенциальной энергий имеют вид: 1 2 1 2 1 2
T = 2 m l У 1 + 2 m 2 y 2 + 2 m o y o,
П = 2 k i ( У 1 - z ) 2 + 2 k 2 ( у 2 - У 1 ) 2 + 2 k з ( у o - У 1 ) 2 + 2 k 4 ( у 2 - у 0 ) 2.
С учетом кинематических соотношений сложного движения (36), (37) и введением коэффициента рычажной l связи i = — получим:
l 1
T = 2 m l y2 + 2 m 2 y ^ + 2 m 0 [ y ( 1 + i p ) - y 2 i p ] 2,
П = ^ k 1 ( y i - z ) 2 + 2 k 2 ( У 2 - y i )2 + 2 k 3 i p ( y i - y 2 )2 + 2 k 4 (1 + i p )2 • ( y 2 - y i )2.
В данном случае уравнения движения системы принимают вид:
y i I m i + m 0 ( i p + 1 ) 2 1 + y i
k i + k 2 + k 3 i p + + k 4 ( i p + i )
- y 2 m 0 i p ( i p + i ) - у 2
k 2 + k 3 i p +
+ k 4 ( i + i p )
= k i z ( t ),
y 2 ( m 2 + m 0 i p ) + У 2
k 2 + k 3 i p +
+k4 (i + ip )
- y i m 0 i p ( i p + 1 ) - y i
k 2 + k 3 i p +
+ k 4 ( i + i p )
= 0.
На основании дифференциальных уравнений (40), (41) после преобразований Лапласа [3, 5] может быть построена структурная схема (рис. 8), которая имеет две координаты y1 и y2 . Что касается координаты y0 , то она свя- зана с y1 и y2 следующими соотношениями:
y 0 = У 1 ( 1 + i p ) - y 2 i p . (42)
Коэффициенты уравнений (40) и (41) в операторной форме приводятся в таблице 1.
Таблица 1
Table 1
Коэффициенты уравнений (40), (41) в координатах y 1 , y 2
Coefficients of equations (40), (41) in coordinates y 1 , y 2
|
а 11 |
а 12 |
|
m l + m 0 ( i p + 1 ) 2 p 2 + k 1 + k 2 + k 3 i 2 + k 4 ( i p + 1 ) 2 |
- [ m 0 i p ( i p + 1 ) P 2 + k 2 + k 3 i p + k 4 ( 1 + i p ) ] |
|
а 21 |
a 22 |
|
- [ m 0 i p ( i p + 1 ) p 2 + k 2 + k 3 i 2p + k 4 ( 1 + i p ) 2 ] |
( m 2 + m 0 i p ) p 2 + k 2 + k 3 i p ' + k 4 ( 1 + i p ) 2 |
|
Q 1 |
Q 2 |
|
k 1 z ( t ) |
0 |
Примечание: p = j и — комплексная переменная ( j = V-l ); символ <-> над переменной означает её изображение по
Лапласу [3, 5].
Структурная схема системы в соответствии с данными таблицы 1 имеет вид, проиллюстрированный на рис. 8. При частоте
2 k 2 + k з i p + k 4 ( 1 + i p ) ® меж = . /.
m0ip (ip + 1)
межпарциальная связь «обнуляется» и система принимает вырожденную форму. В общем случае по каждой из координат возможны режимы динамического гашения колебаний на частотах
1дин
k 2 + к з 1 2 + k 4 ( 1 + i p ) 2
= . . 2 , m 2 + m о ip
2 дин
k 2 + k 3 i P + k 4 ( 1 + i p ) m 0 i p ( i p + 1 )
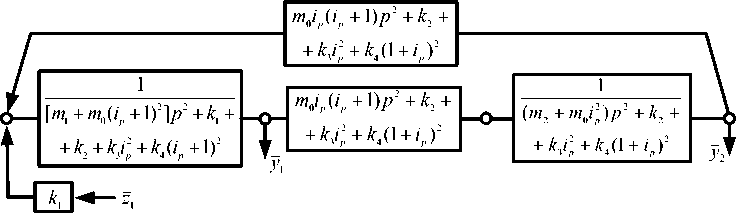
Рис. 8. Структурная математическая модель механической колебательной системы, изображенной на рис. 7
Fig. 8. Structural mathematical model of mechanical oscillatory system pictured in Fig. 7
Передаточные функции системы при кинематическом возмущении определяются из структурной схемы и
имеют вид:
y ( m 2 + m 0 i p ) p 2 + k 2 + k з i p + k 4 (1 + i p ) 2
W( p) = =----------—--------- k1z1 A(p)
Машиностроение и машиноведение
wr x У 2 m 0 i p ( i p + 1) P1 + k 2 + k 3 i P + k 4 (1 + i p )2
W2(p) = —— = —-----------------— k1 z1 A(p)
Введем понятие передаточной функции межпарциальных связей:
У m 0 i p ( i p + 1) P 2 + k 2 + k 3 i P + k 4 (1 + i p )2
W 2( P ) = =22 2 ^,
У 1 ( m 2 + m 0 i p ) p + k 2 + k 3 i p + k 4 (1 + i p )
где
A ( P ) = {[ m i + m 0 ( i p + 1)2 ] P 2 + k i + k 2 + k 3 i p + k 4 ( i p + 1)2} x x [( m 2 + m 0 i 2 ) p 2 + к 2 + к 3 i p + к 4 (1 + i p )2 ] - [ m 0 i p ( i p + 1) p 2 + к 2 + к 3 i p + к 4 (1 + i p )2 ]2
— характеристическое частотное уравнение системы.
Если i р = 0, то выражения (46), (47) трансформируются к виду:
W ( P ) =
У 1 k 1 z
m 2 p 2 + k 2 + k 4
A ( P
W 2 ( p ) =
У 2 k 1 Z
k 2 + k 4
A ' ( p ) ,
где
A ' ( P ) = [( m1 + m 0 ) P 2 + k 1 + k 2 + k 4 ] ' ( m 2 P 2 + k 2 + k 4) - ( k 2 + k 4) 2
— характеристическое частотное уравнение исходной системы при ip = 0.
Парциальные частоты системы в общем случае определяются выражениями:
2 k1 + k2 + k3i2 + k4 (Ip + 1)2 П =--------------------2-----, m1 + m 0( ip +1)
2 k 2 + k 3 i> k 4 (1 + i p )2 n 2 = ---------------^------- .
m 2 + m 0 iP
При k 1 = 0 структурная схема на рис. 8 преобразуется в структурную схему диады, приведенную на рис. 9.
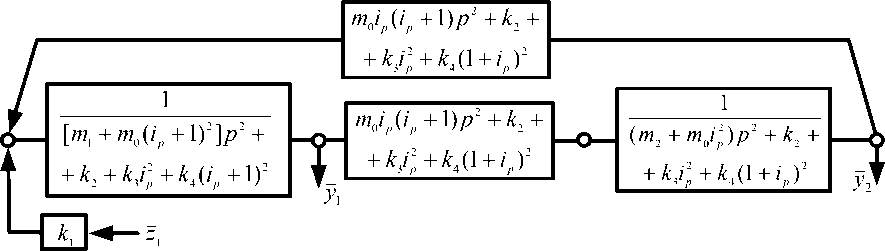
Рис. 9. Структурная схема диады в общем виде
Fig. 9. Dyad structural diagram in general form
Переход к унифицированной форме диады осуществляется на основе формальных приемов, которые заключаются в выделении для передаточных функций парциальных систем фрагментов, имеющих вид передаточных функций межпарциальных связей. Таким образом, по координате у , справедливо выражение:
[ m 1 + m 0 ( i p + 1)2 ] P 2 + k 2 + k 3 i 2 + k 4 ( i p + 1)2 = m 1 P 2 + m 0 ( i p + !) P 2 + m 0 i p ( i p + 1) P 2 + k 0 = = [ m 1 + m 0 ( i p + 1)] p 2 + m 0 i p ( i p + 1) p 2 + k 0 = [ m 1 + m 0 ( i p + 1)] p 2 + Lp 2 + k 0 .
В свою очередь, по координате у 2 получаем равенство:
( m 2 + m 0 i p ) p 2 + k 2 + k 3 i p + k 4 (1 + i p )2 = ( m 2 - m 0 i p ) p 2 + m 0 i p ( i p + 1) p 2 + k 0 = = ( m 2 - m 0 i p ) p 2 + Lp 2 + k 0 .
Структурная схема (рис. 9) на основе выражений (55), (56) преобразуется к виду, изображенному на рис. 10.
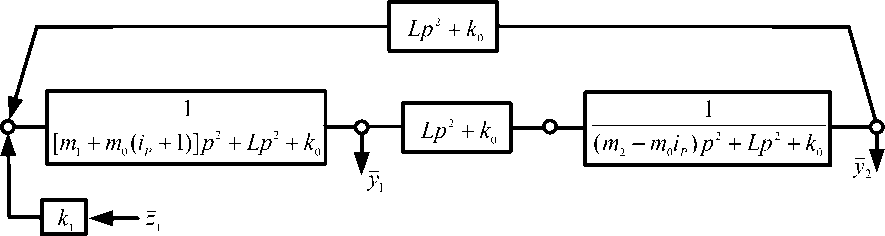
Рис. 10. Структурная схема диады с устройством для преобразования движения
Fig. 10. Dyad structural diagram with motion translation device
Таким образом, в составе расчетной схемы в виде механической колебательной системы с двумя степенями свободы (рис. 7), имеющей рычажный механизм второго рода может быть выделена диада. В диаде кроме обычных массоинерционных элементов m ‘ = m 1 + m 0 ( i p + 1) и m ‘ = m 2 - m 0 i p содержится УПД с передаточной функцией
L = m о i p ( i p + 1), (57)
а также обобщенная пружина с коэффициентом жесткости k 0 , который соответствует жесткости трех параллельно соединенных пружин:
k 0 = k 2 + k з i p + k 4 ( ip + 1)2. (58)
При «обнулении» k 2 , k 3 , k 4 и m 0 система превращается в обычную диаду, рассмотренную в предыдущих разделах статьи.
Заключение. Диада в механических колебательных системах представляет собой структурное образование, которое в составе механических колебательных систем может рассматриваться как системообразующий элемент, предопределяющий динамические свойства системы в целом.
Доказано, что диада может быть выделена из исходной системы и представлена в условиях изоляции от связей с внешними элементами и опорными поверхностями, либо рассматриваться во взаимодействиях с такими поверхностями без учета сил сопротивления. В рамках такого подхода диада представляет собой систему с двумя степенями свободы, в которой соединение массоинерционных элементов происходит через линейную пружину.
Авторами развиты и детализированы представления о динамических свойствах диад, включающих в свой состав дополнительные связи, введенные параллельно упругому элементу, реализуемые в виде устройств для преобразования движения. Представлены структурные математические модели в динамическом отношении эквивалентные структурным схемам систем автоматического управления. Усилительное звено рассматривалось как эквивалент пружины, а звено УПД — как типовое звено структурной модели, имеющее передаточную функцию дифференцирующего элемента второго порядка.
Введение такого рода связей в структуру диады существенным образом изменило набор её динамических свойств по сравнению с обычными подходами. Показано, что устройство для преобразования движения с передаточной функцией дифференцирующего звена второго порядка может быть практически реализовано с использованием рычажных механизмов.
Таким образом, предложен метод построения математической модели диады общего вида: произведена оценка динамических свойств диад, выявлены новые динамические эффекты, отражающие возможности учета особенностей форм движения элементов диады и совместного действия внешних сил, что создает возможности для поиска и разработки новых подходов в управлении динамическим состоянием механических колебательных систем.
Список литературы Устройства для преобразования движения в структуре диады механической колебательной системы
- I. A. Karnovsky, E. Lebed, Theory of vibration protection, doi 10.1007/978-3-319-28020-2. Switzerland, 2016. -669 p.
- De Silva, C. W. Vibration. Fundamentals and Practice/Clarence W. de Silva. -Boca Raton, London, New York, Washington, D.C.: CRC Press, 2000. -957 p.
- Елисеев, С. В. Динамическое гашение колебаний: концепция обратной связи и структурные методы математического моделирования/С. В. Елисеев, А. П. Хоменко. -Новосибирск: Наука, 2014. -357 с.
- Галиев, И. И. Методы и средства виброзащиты железнодорожных экипажей/И. И. Галиев, В. А. Нехаев, В. А. Николаев. -Москва: Учебно-методический центр по образованию на ж.-д. трансп., 2010. -340 с.
- Елисеев, С. В. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов/С. В. Елисеев, Ю. И. Резник, А. П. Хоменко, А. А. Засядко. -Иркутск: ИГУ, 2008. -523 с.
- Генкин, М. Д. Упруго-инерционные виброизолирующие системы. Предельные возможности, оптимальные структуры/М. Д. Генкин, В. М. Рябой. -Москва: Наука, 1988. -191 с.
- Eliseev S. V., Lukyanov A. V., Reznik Yu. N., Khomenko A. P. Dynamics of mechanical system with additional ties. Irkutsk, 2006. -315 p.
- Ким, Д. П. Теория автоматического управления. Т. 1. Линейные системы/Д. П. Ким. -Москва: ФИЗМАТЛИТ, 2003. -288 с.
- Каимов, Е. В. Оценка динамических свойств в системе с рычажными связями/Е. В. Каимов, А. И. Артюнин//Информационные и математические технологии в науке и управлении: труды XIX Байкальской Всероссийской конф. -Иркутск, 2014. -С. 123-130.
- Каимов, Е. В. Особенности рычажных связей в схемах подвесок и приборов/Е. В. Каимов, В. Б. Кашуба//Перспективы развития и эффективность функционирования транспортного комплекса юга России: труды межд. научно-практ. конф. -Ростов-на-Дону, 2015. -С. 224-226.
- Rocard Y. General Dynamics of Vibrations. Paris: Masson, 1949. -458 p.
