Устройства захвата и переноса изделий со сложным движением двуплечего звена, несущего рабочий орган

Автор: Середа Наталья Александровна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.19, 2017 года.
Бесплатный доступ
В работе проведен сравнительный анализ конструктивных решений трех устройств захвата и переноса изделий. Эти устройства объединены общим признаком - наличием сложного движения двуплечего звена, несущего рабочий орган. Сложное движение названного звена включает два простых движения в следующем сочетании: возвратно-поступательное и возвратно-поворотное. Для каждой из трех конструкций устройств в аналитическом виде получены законы движения двуплечего звена, несущего рабочий орган. При этом использовался математический аппарат - функция положения, первая и вторая геометрические передаточные функции. Этот аппарат - алгоритмическая основа расчета и анализа параметров устройств захвата и переноса изделий.
Устройство, захват и перенос изделия, функция положения, первая и вторая геометрические передаточные функции, параметры
Короткий адрес: https://sciup.org/148205041
IDR: 148205041 | УДК: 621.837.3
Devices for gripping and transferring billets of products with complex movement of double arms link, carrying the working body
In work the comparative analysis of constructive solutions of three devices for gripping and transferring of products is carried out. These devices are united by a general sign - availability of complex movement of double link bearing working body. Complex movement of the called link includes two simple movements in the following combination: reciprocating-rotary and reciprocation. For each of three designs of devices in an analytical type laws of movement of the double link bearing working body are received. At the same time the mathematical apparatus - function of a position, the first and second geometrical transfer functions was used. This apparatus - an algorithmic basis of calculation and the analysis of parameters of devices for gripping and transferring of products.
Текст научной статьи Устройства захвата и переноса изделий со сложным движением двуплечего звена, несущего рабочий орган
движением двуплечего звена, несущего рабочий орган. Это устройство выполнено в виде комбинированного механизма, содержащего передаточный и исполнительный механизмы, а также привод (на рис. 1 не показан) [4]. Передаточный механизм устройства – многозвенный рычажно-зубчатый механизм. Он содержит кривошип 1 , ползун 2 , кулису 3 , штангу 6 , зубчатые колеса 7 и 8 , двуплечее звено 9 (плечи А и Б ), поворотную направляющую 10 . Кулиса 3 состоит из подвижного стержня 4 и рамки 5 для кинематической связи с ползуном 2. Стержень 4 смонтирован в неподвижных направляющих, рамка 5 жестко связана со стержнем 4. Зубчатые колеса 7 и 8 смонтированы на общей оси и жестко связаны между собой. Названные колеса сопряжены с зубчатыми рейками, жестко укрепленными на стержне 4 и штанге 6 . Зубчатые колеса 7 и 8 имеют разные диаметры делительных окружностей. Исполнительный механизм устройства захвата и переноса изделий – рычажно-кулачковый механизм. Этот механизм установлен на пальце 11 плеча Б звена 9 . Исполнительный механизм содержит рычаги 12 и 13 с губками, копир 14 с фигурными пазами 15 и 16 для взаимодействия с роликами 17 . Ролики 17 смонтированы на свободных концах рычагов 12 и 13 . Двуплечее звено 9, несущее рабочий орган, совершает сложение движение – возвратно-поворотное и возвратно-поступательное вдоль своей продольной оси.
Функция положения двуплечего звена 9 в его поворотном движении (рис. 1) равна
γ ( ϕ ) = П( ϕ ) = 2 ⋅ arctg(2 ⋅ λ ⋅ sin( ϕ ))
где λ – относительная длина кривошипа 1 ,
λ= 1 ; l – длина кривошипа 1; n – передаточное n⋅h число зубчатых колес 7 и 8; h – расстояние от оси поворота двуплечего звена 9 до линии хода штанги 6 (рис. 1); ϕ – угол поворота кривошипа 1. Отсчёт угла ϕ принят от крайнего правого положения рычажно-зубчатого механизма.
€ ( ф ) =
-0.1 96
-0.375
-0.526
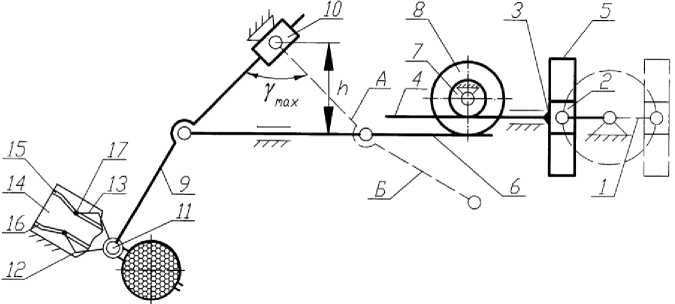
Рис. 1. Кинематическая схема устройства захвата и переноса изделий [4]
Первая и вторая геометрические передаточные функции устройства по рис. 1 составят
9(ф) = П (Ф) = dY = 4'Я ■- йф (1 + 4 • Я2 • sin2(ф)) р)
ССф) = П"(ф) = d2Y =
d^2
—
4• Я • sin(^) •[/ + 8 • Я2 — 4• Я2 • sin2(^)] [1 + 4 • Я2 • sin2(^)]2
расширяет технологические возможности использования устройства. При этом увеличение длины плеча Б звена, несущего рабочий орган, усиливает влияние поворотной составляющей сложного движения этого звена на траекторию движения рычагов с губками для захвата изделий. На рис. 3 приведена кинематическая схема устройства для захвата и переноса изделий. Устройство включает передаточный и исполнительный механизмы, а также привод (на рис. 3 не показан) [5].
. (3)
На рис. 2 представлена графическая интерпретация зависимостей (1) - (3) при значении
-0.644 Я = 0,21.
-0.728
-0.784
-0.8 18
-0.835
-0.84
-0.835
-0.8 18
-0.784
-0.728
-0.644
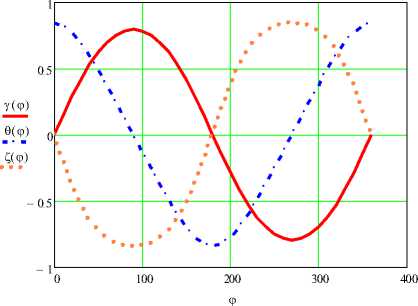
Рис. 2. Функция положения, первая и вторая геометрические передаточные функции двуплечего звена, несущего рабочий орган
Анализ рис. 2 показал, что возвратно-поворотная составляющая сложного движения двуплечего звена 9 , несущего рабочий орган, осуществляется по гармоническому закону - закону синуса. Поворотная составляющая сложного движения двуплечего звена в значительной мере определяет траекторию движения пальца 11 , несущего рабочий орган с изделием. Функции на рис. 2 изменяются плавно, не имеют разрывов непрерывности, что свидетельствует о безударном характере движения двуплечего звена. Выполнение звена 9 двуплечим предопределяет сложное движение этого звена, что
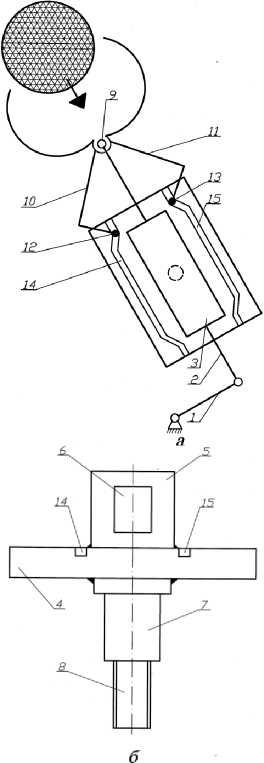
Рис. 3. Устройство для захвата и переноса изделий [5]: а - кинематическая схема; б - стержень 3 передаточного механизма
Передаточный механизм выполнен в виде кулисного механизма. Он содержит кривошип 1 , кулису 2 , пустотелый стержень 3 . Кривошип закреплен на валу привода, кулиса шарнирно связана с кривошипом и подвижно сопряжена со стержнем. Стержень шарнирно связан со стойкой. Стержень 3 имеет определенное конструктивное оформление. Он содержит плиту 4 , направляющую 5 с отверстием 6 и палец 7 . Направляющая закреплена на плите, отверстие в направляющей - сквозное для сопряжения с кулисой 2 . Плита шарнирно связана со стойкой посредством пальца 7 , который выполнен в виде ступенчатого цилиндра. Концевая часть 8 пальца снабжена резьбой для крепежного элемента (гайки или контргайки). Исполнительный механизм выполнен в виде рычажно-кулачкового механизма и установлен на пальце 9 , жестко закрепленном на свободном конце кулисы 2 . Исполнительный механизм включает рычаги 10 и 11 , ролики 12 и 13 и продольные пазы 14 и 15 . Пазы выполнены в теле плиты 4 , ролики смонтированы на свободных концах рычагов. Звено 2 , несущее рабочий орган, совершает сложное движение, а именно: возвратноповоротное и возвратно-поступательное вдоль продольной оси этого звена.
Функция положения звена 2 в его поворотном движении (рис. 3) составит
Р ( ф ) = П( ф ) = arcsin l1 sin ^ ) 1 1 ' , (4)
где I ; - длина кривошипа 1; А - длина части кулисы 2, определяемая как расстояние от точки шарнирной связи кулисы и кривошипа до точки шарнирн ой связи стержня со стойкой, при этом A = a + li — 2' loЬ ' cos( ф)
0 1 01 ", — - длина стойки (межцентровое расстояние).
Отсчет угла ф принят от положения кулисного механизма, при котором продольные оси кривошипа и кулисы вытянуты в одну линию. Первая геометрическая передаточная функция звена 2 равна
Список литературы Устройства захвата и переноса изделий со сложным движением двуплечего звена, несущего рабочий орган
- Крайнев, А.Ф. Словарь-справочник по механизмам. -М.: Машиностроение, 1987. 560 с.
- Крайнев, А.Ф. Машиноведение на языке схем, рисунков и чертежей. Книга 2. Детали машин, соединения и механизмы. -М.: Спектр, 2010. 216 с.
- Козырев, Ю.Г. Промышленные роботы: Справочник. -М.: Машиностроение, 1983. 376 с.
- Горлатов, А.С. Комбинированный механизм со сложным движением выходных звеньев/А.С. Горлатов, И.С. Аржанова: пат. 2303520 Рос. Федерация. № 2006100427/02; заявл. 10.01.2006; опубл. 27.07.2007. Бюл. № 21. -11 с.
- Горлатов, А.С. Устройство типа «рука» для передачи изделий/А.С. Горлатов: пат. 2191107 Рос. Федерация. № 2002101571/02; заявл. 14.01.2002; опубл. 20.10.2002. Бюл. № 29. -7 с.
- Горлатов, А.С. Манипулятор для передачи изделий/А.С. Горлатов, Н.А. Середа: пат. 2376130 Рос. Федерация. № 2008122804/02; заявл. 05.06.2008; опубл. 20.12.2009. Бюл. № 35. -7 с.
- Середа, Н.А. Исследование передаточного механизма манипулятора для передачи штучных изделий.//Справочник. Инженерный журнал с приложением. 2014. № 7. С. 35-39.
- Середа, Н.А. Анализ конструкции манипулятора для передачи штучных изделий со сложным движением ведущего звена исполнительного механизма//Техника и технология. 2013. № 2. С. 7-13.
