Устройство управления судовым двигателем внутреннего сгорания

Автор: Васильев М.В.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Статья в выпуске: 3 т.11, 2008 года.
Бесплатный доступ
В статье обоснована актуальность применения системы адаптивного регулирования частоты вращения главных двигателей морских судов, а также описан принцип работы системы адаптивного управления частотой вращения судового главного двигателя.
Короткий адрес: https://sciup.org/14293976
IDR: 14293976 | УДК: 621.431.74.002.51:431.74.004.13
On the device of marine main engine control
The paper describes the necessity of application of adaptive control of the marine main engine speed and also describes the principle of operation of the adaptive speed control system of the marine main engine.
Текст научной статьи Устройство управления судовым двигателем внутреннего сгорания
Васильев М.В. Устройство управления судовым двигателем… internal combustion engine rotation speed pulsation), дата публикации 15.07.2003, автор: Фень Лин (Feng Lin) и др. .
-
1. Патент США № 5213077. Устройство регулирования заброса для ПИД-регулятора для управления частотой вращения двигателя внутреннего сгорания (Gain adjusting device for PID controller for controlling rotational speed of internal combustion engine), дата публикации: 25.05.1993, автор: Нижизава (Nishizawa) и др. ( http://www.uspto.gov/patft/index.html) .
Наиболее близким по принципу является патент США № 6591808 B2. Функциональная схема изобретения по патенту США № 6591808 B2 представлена на рис. 1. Краткое описание изобретения: метод и система, обеспечивающие работу двигателя внутреннего сгорания, позволяют уменьшать колебание частоты вращения за счёт изменения параметров ПИД-регулятора (пропорционально-интегрально-дифференциальный регулятор), в основном уменьшение колебаний наблюдается при изменении параметра Кд. Метод и система используют пару управляющих алгоритмов для уменьшения колебаний частоты вращения.
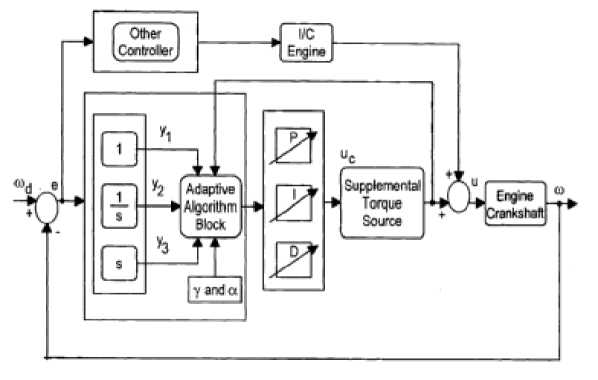
Рис. 1. Функциональная схема системы адаптивного ПИД регулирования для двигателя внутреннего сгорания.
Adaptive algorithm block – блок адаптивного алгоритма управления, supplemental torque source – источник дополнительного момента, engine crankshaft – коленчатый вал, other controller – регулятор, I/C Engine – двигатель внутреннего сгорания
Однако устройство, принятое за прототип, обладает рядом недостатков: используется источник дополнительного момента, что в случаях с двигателем больших размеров ведёт к утяжелению системы в целом.
Технический результат, на достижение которого направлено предлагаемое нами устройство, заключается в уменьшении амплитуды колебания частоты вращения двигателя при гармоническом изменении нагрузки двигателя.
Для достижения технического результата предлагается устройство для управления работой судового двигателя внутреннего сгорания, содержащее блок алгоритма адаптивного управления, на вход которого поступает информация о значении частоты вращения двигателя и информация о значении частоты колебания нагрузки двигателя с устройства определения частоты колебания нагрузки двигателя, электронный регулятор частоты вращения (далее регулятор) с изменяемыми управляющими параметрами Т 1 (постоянная времени регулятора) и δ (степень неравномерности частоты вращения), вход которого соединён с выходом блока алгоритма адаптивного управления, выход электронного регулятора частоты вращения двигателя соединён с топливной рейкой судового двигателя внутреннего сгорания.
Отличиями предлагаемого устройства от указанного выше аналога являются: отсутствие устройства дополнительного момента, использование только одного регулятора, в котором в качестве управляющих параметров используются параметры Т 1 и δ , а также наличие устройства определения частоты колебания нагрузки двигателя внутреннего сгорания, с которого поступает информация о значении частоты колебания нагрузки на один из входов блока алгоритма адаптивного управления.
На рис. 2 представлена функциональная схема предлагаемого устройства.
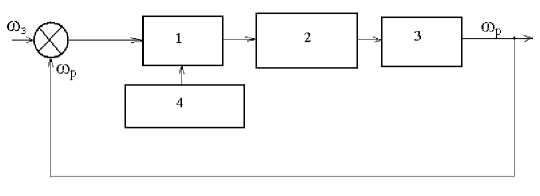
Рис. 2. Функциональная схема устройства управления двигателем
-
1 – блок алгоритма адаптивного управления,
-
2 – электронный регулятор частоты вращения,
-
3 – судовой двигатель внутреннего сгорания,
-
4 – устройство определения частоты изменения нагрузки двигателя.
На вход блока алгоритма адаптивного управления 1 поступает информация о значении частоты вращения двигателя, а на другой вход поступает информация о значении частоты изменения нагрузки двигателя от устройства определения частоты изменения нагрузки двигателя 4. Выход блока алгоритма адаптивного управления 1 связан со входом электронного регулятора частоты вращения 2, далее электронный регулятор частоты вращения через топливную рейку связан с судовым двигателем внутреннего сгорания. При этом регулятор описывается дифференциальным уравнением первого порядка и имеет следующий вид:
T1 dη +δ⋅η =φ-θ1α1, dt где η – перемещение муфты регулятора, θ1 – коэффициент усиления по настройке регулятора, α1 – изменение скоростного режима регулятора, T1 – постоянная времени регулятора, δ – степень неравномерности регулятора. Изменение частоты вращения двигателя φ описывается дифференциальным уравнением вида:
d 3 ϕ d 2 ϕ d ϕ d 2 α д d α д
A+A+A+Aϕ=B+B+Bα , 3dt32dt21dt 04dt23dt 2д где αд = Am cos(Ωe t) – изменение нагрузки двигателя, Am – амплитуда колебания нагрузки двигателя, Ωe – частота колебания нагрузки двигателя, φ – частота вращения коленчатого вала двигателя, A3, A2, A1, A0, В4, В3, В2 – коэффициенты.
Устройство работает следующим образом.
Допустим, волнение моря составляет 3 балла, которое характеризуется изменением нагрузки двигателя с частотой Ω е = 1,5 рад/с, при этом Т 1 = 0,4 с, δ = 0,05 (5 %) (рис. 3).
Спустя некоторое время происходит изменение волнения моря, допустим до 6 баллов, как следствие частота изменения нагрузки двигателя внутреннего сгорания сдвигается до Ωе = 0,82 рад/с, что определяется устройством определения частоты изменения нагрузки двигателя 4, и значение Ω е = 0,82 рад/с поступает на вход блока алгоритма адаптивного управления 1. Так как постоянная времени регулятора не изменилась, т.е. T 1 = 0,4 с, то происходит сдвиг фазы кривой изменения частоты вращения коленчатого вала двигателя относительно кривой изменения нагрузки двигателя. Сдвиг фазы будет характеризоваться нестабильностью работы двигателя. При этом также имеет место увеличение амплитуды колебаний частоты вращения коленчатого вала двигателя от 2 % до 5 % (рис. 4).
Далее, для возврата двигателя в устойчивый режим работы необходимо устранить сдвиг фазы кривой изменения частоты вращения или, иными словами, добиться полного зеркального отображения кривых изменения частоты вращения коленчатого вала двигателя и нагрузки двигателя, при этом необходимо, чтобы после изменения величины параметров амплитуда изменения частоты вращения не увеличилась. Для устранения сдвига фаз частоты вращения и нагрузки двигателя можно увеличить постоянную времени регулятора T 1 до значения 1,2 с, а степень неравномерности оставить без изменения на уровне 0,05. Но при этой настройке имеет место увеличение амплитуды колебаний частоты вращения с 4,2 % до 5,6 % (рис. 5).
Так как увеличение амплитуды изменения частоты вращения коленчатого вала двигателя нас не устраивает, уменьшим значение времени регулятора Т 1 до 0,1 с, оставив без изменений значение степени неравномерности частоты вращения на уровне 0,05 (5 %) (рис. 6).
Далее увеличим степень неравномерности до 0,17 (17 %) (рис. 7).
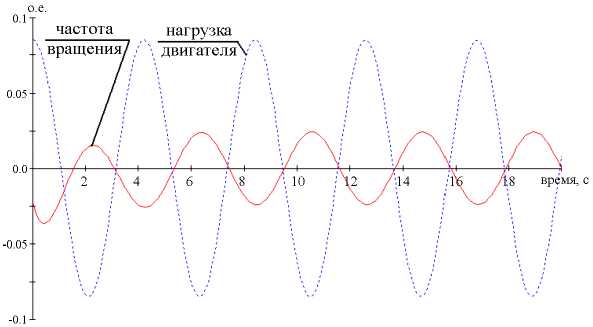
Рис. 3. Изменение частоты вращения коленчатого вала двигателя при регулярном волнении 3 балла, T 1 = 0,4 с, степень
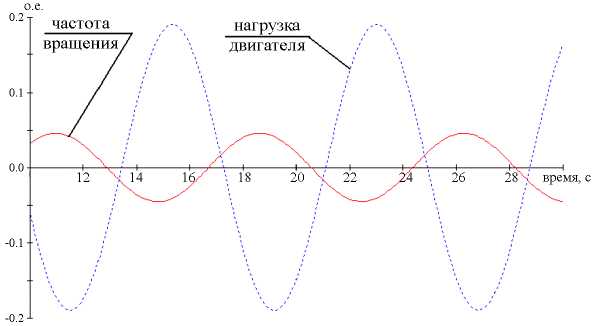
Рис. 4. Изменение частоты вращения коленчатого вала двигателя при регулярном волнении 6 баллов, T 1 = 0,4 с, степень неравномерности частоты
неравномерности δ = 0,05 (5 %)
вращения δ = 0,05 (5 %)
Васильев М.В. Устройство управления судовым двигателем…
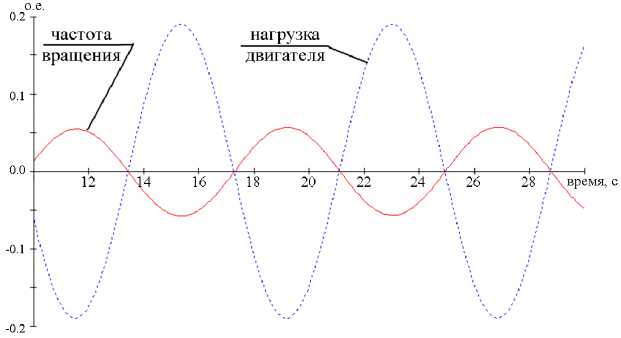
Рис. 5. Изменение частоты вращения коленчатого вала двигателя при регулярном волнении 6 баллов, T 1 = 1,2 с, степень неравномерности δ = 0,05 (5 %)
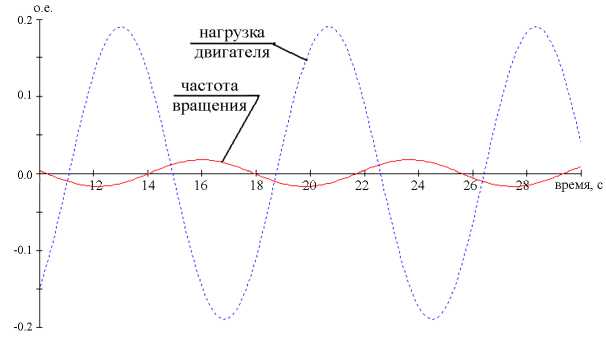
Рис. 6. Изменение частоты вращения коленчатого вала двигателя при регулярном волнении 6 баллов, T 1 = 0,1 с, степень неравномерности δ = 0,05 (5 %)
В результате имеем уменьшение амплитуды колебаний частоты вращения и устранение сдвига фаз кривой изменения частоты вращения и кривой изменения нагрузки двигателя.
Таким образом, предлагаемое устройство позволяет осуществлять изменение частоты вращения коленчатого вала двигателя за счет изменения параметров регулятора, в нашем случае за счёт времени регулятора Т 1 и степени неравномерности частоты вращения δ .
На основании рис. 3-7, показывающих изменение вида кривой частоты вращения в зависимости от параметров Т 1 и δ , можно построить графики (рис. 8), определяющие зависимости Т 1 = f ( Ωе ) и δ = f ( Ωе ).
Команду для изменения параметров Т 1 и
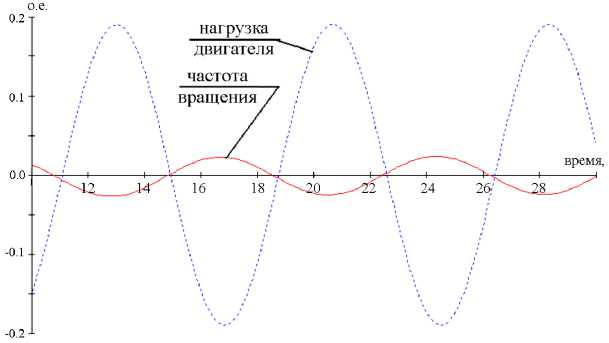
Рис. 7. Изменение частоты вращения коленчатого вала двигателя при регулярном волнении 6 баллов, T 1 = 0,1 с, степень неравномерности регулятора δ = 0,17 (17 %)
δ электронного регулятора 2 даёт блок алгоритма
адаптивного управления 1, в памяти которого заложены зависимости Т 1 = f ( Ω е ) и δ = f ( Ω е ).
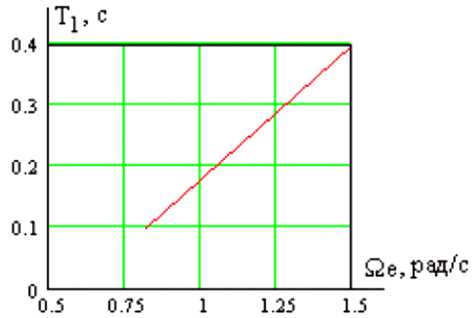
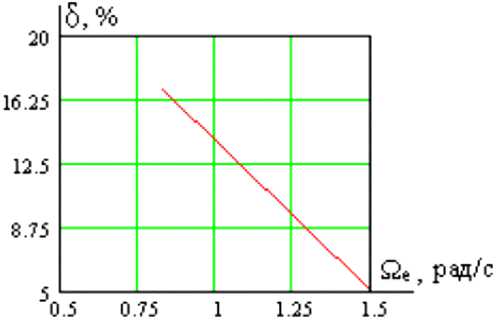
Рис. 8. График изменения времени регулятора Т 1 и степени неравномерности частоты вращения δ в зависимости от частоты колебания нагрузки двигателя Ωe
3. Заключение
Внедрение адаптивного управления частотой вращения является актуальным для морских судов, главные двигатели которых работают в условиях постоянного изменения нагрузки, и на основании проведённого исследования можно сделать вывод о том, что поставленная задача выполнима.
