Устройство защиты привода канатной пилы от технологических перегрузок

Автор: Калакуцкий Алексей Васильевич
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 9, 2011 года.
Бесплатный доступ
В статье описано устройство защиты привода канатной пилы от технологических перегрузок. Произведен анализ формулы для определения максимального усилия в канате при его стопорении, что происходит при скоростях движения каната, близких к нулю, привод при небольших значениях движущего момента может развить усилие в канате, значительно превышающее разрывное усилие каната. В эксплуатационных условиях есть вероятность разрыва каната как за счет суммарного действия максимального момента двигателя и кинетической энергии движущихся масс системы, так и за счет действия только момента двигателя при скоростях движения каната, близких к нулю. Для решения данной задачи предложено исполнение схемы узла защиты, работающего по методу «срыва барабанов» гидроподающей части.
Привод, канатная пила, привод канатной пилы, момент, режущая часть, кинетическая энергия
Короткий адрес: https://sciup.org/140215380
IDR: 140215380 | УДК: 621.9.025.7
Текст научной статьи Устройство защиты привода канатной пилы от технологических перегрузок
Максимальная расчетная нагрузка в режущем органе при его внезапном стопорении определяется по фор муле:
Pрасч P max 2 c Ac , (1)
где Pmax – усилие в системе, соответствующее максимальному опро-ac кидывающему моменту двигателя, кг; с n m – приведенная жесткость; ac nm an – жесткость стопорящего препятствия; cm – жесткость трансмиссии привода.
Кинетическая энергия привода складывается из энергии ротора и элементов трансмиссии:
GD n m J k m
A jj jj c 2 4q 30 i 1 2 j 1 2
GD2 n где – кинетическая энергия ротора двигателя, кГм;
2 4 q 30
GD 2 – маховый момент двигателя, кГм2 ;
mJ 2
j j – кинетическая энергия вращающихся элементов i 1 2
системы, кГм;
J i – момент инерции i – того элемента, кгм/сек2;
ωi - угловая скорость i –того элемента, 1/сек; km j j – кинетическая энергия поступательно движущихся j1 2
элементов системы, кГм;
m – масса j – того элемента;
ν j – скорость j – того элемента.
Формула (2) не может быть расчетной в случае стопорения режущего органа применительно к приводам пил возвратно-поступательного действия, так как она действительна только при условии P max fф = const . Особенностью же приводов пил типа ПП является наличие своеобразной зависимости между моментом на валу ведущего водила и тяговым усилием на ведущем (рабочем) канате.
Мощность на валу ведущего водила определяется по формуле:
N в M дв i- , кВт
в дв 102 Лр, где Nв – мощность на валу водила, кВт; Мдв – мощность на валу ротора двигателя, кГм; ηр- к.п.д. редуктора режущей части.
При стопорении режущего органа ведомый канат ослабляется и на процесс формирования нагрузок в приводе влияния не оказывает.
Мощность, развиваемая на ведущем канате:
TV
N раб , кВт к 102
Не учитывая несинхронность движения тяговых канатов, скорость движения рабочего каната:
Vраб 0,5 S max со- sin со- t , м/с
Тогда
N T max -со- sin со • t , кВт k 204 ,
Приравняв формулы (3), (6) и, заменив максимальным опрокидывающим моментом Мmax, а усилие Т- максимальным усилием Pmax от действия Mmax, получим формулу для определения максимального усилия в рабочем канате при стопорении режущего органа:
P 2 i M max , кг
P max ,
S max Лр sin со-t
Анализ формул показывает, что при скоростях движения каната, близких к нулю (начало и конец хода режущего органа), привод при небольших значениях движущего момента может развить усилие в канате, значительно превышающее разрывное усилие каната Т р .
Таким образом, в эксплуатационных условиях есть вероятность разрыва каната как за счет суммарного действия максимального момента двигателя и кинетической энергии движущихся масс системы, так и за счет действия только момента двигателя при скоростях движения каната, близких к нулю.
Этим обстоятельством продиктовано исполнение схемы узла защиты (рис. 1), работающего по методу «срыва барабанов» гидроподающей части.
В гидросистему подающей части (рис. 1) параллельно включаются два золотника 3P 1 и ЗР 2 каждый из которых, связан с подпружинным роликом, находящимся в постоянном контакте с тяговым канатом. При стопорении исполнительного органа 5 усилие в рабочем канате увеличивается от номинального до максимального Т` ср , вследствие чего ролик перемещается вниз, сжимая пружину. Когда усилие в канате становится равным усилию срабатывания узла защиты, золотник полностью открывается, сообщаются между собой каналы 1-1 и тем самым подготавливается «срыв барабанов», то есть выведение из силовой кинематической цепи барабанов под действием упругих сил в канате и продолжающегося вращения водил. Предохранительный клапан шунтируется и давление в гидросистеме падает практически до нуля. Под действием усилия в канате Тср и продолжающегося вращения ведущего звена 4 (от электродвигателя 2 через редуктор 3) барабан 1 и кинематически связанные с ним детали начинают вращаться в сторону, обратную нормальному (рабочему) вращению.
В гидросистеме будут циркулировать, обходя предохранительный клапан, два потока масла: гидродвигатель ГД-2-1-1-2 и гидронасос ГН3-1-1-3.
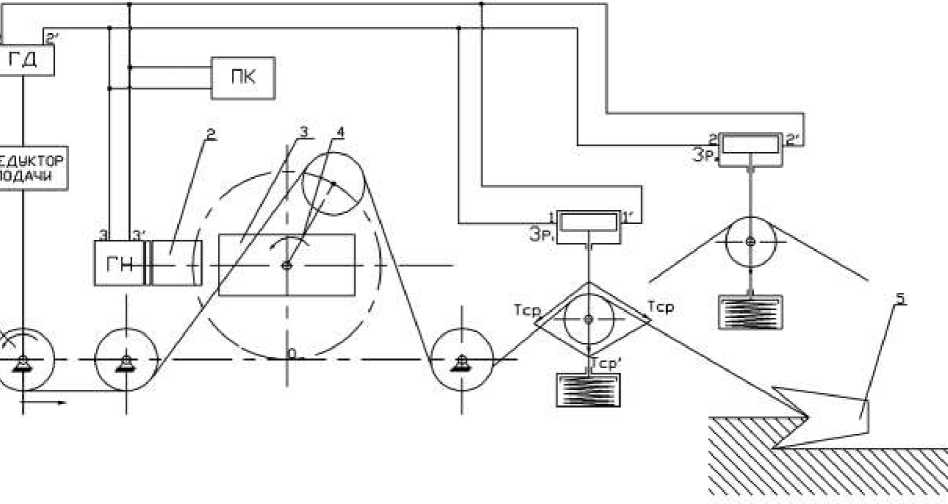
Рис. 1. Схема защиты привода типа ПП от технологических перегрузок
Этот процесс, сопровождается сначала некоторым увеличением усилия в канате, а затем происходит его резкий спад.
Таким образом, устройство защиты привода канатной пилы от технологических перегрузок исключает опасные перегрузки, возникающие при заклинивании исполнительного органа.
