Уточненная плоская механико-математическая модель для определения напряжений в основании ленточного фундамента и его упругой осадки

Автор: Абдеев Б.М., Брим Т.Ф., Муслиманова Г.
Статья в выпуске: 1, 2020 года.
Бесплатный доступ
Получено новое уточненно-модифицированное решение фундаментальной двумерной задачи теории упругости о перпендикулярном приложении к границе полуплоскости сосредоточенно-линейной постоянной нагрузки. В отличие от аналогичной классической задачи Фламана, представляющей собой частный случай простого радиального напряженного состояния, учтены все три компоненты напряжений - два нормальных и касательное, а также дополнительный геометрический параметр, характеризующий ширину площадки фактического распределения внешней локальной силы. Кроме того, на основе классической интерпретации плоской деформации устранены известные противоречия, связанные с неопределенностью углового перемещения на границе полупространства и с постоянством второй кинематической составляющей при стремлении к бесконечности координаты произвольной точки материала основания. В процессе исследований строго доказано существование цилиндрических поверхностей, где действуют равные растягивающие напряжения, траектории которых имеют форму окружностей. В упрощенном решении Фламана такими кривыми линиями-изобарами также являются круги Буссинеска с постоянными главными сжимающими напряжениями. Выведенные аналитические зависимости представлены в прямоугольной системе отсчета, что позволяет количественно оценивать с повышенной точностью: 1) напряжения в глубине основания по горизонтальному и вертикальному сечениям; 2) контактное давление и осадку упругой поверхности грунта под подошвой жесткого длинного фундамента, когда основание, в пределах общепринятых допущений, предполагается линейно-деформируемым, однородным, изотропным, сплошным телом, испытывающим одноразовое загружение. Результаты разработанной обобщенной физико-математической модели могут служить концептуальной базовой основой, используемой при решении специальных фундаментально-прикладных задач механики, имеющих непосредственное отношение к уточненному расчету несущей способности разнообразных деталей и конструкций, широко применяемых в современном машиностроении и строительстве: подшипников скольжения, цилиндрических катков, зубчатых передач, оснований ленточных фундаментов, дорожных покрытий при их уплотнении стальными вальцами и т.д.
Сила, напряжение, деформация, перемещение, полуплоскость, упругость, линейная деформируемость, ленточный фундамент, основание
Короткий адрес: https://sciup.org/146281977
IDR: 146281977 | УДК: 517.958:539.3(2):624.15 | DOI: 10.15593/perm.mech/2020.1.12
The refined plane mechanical and mathematical model determining stresses in the base of the strip foundation and elastic sediment
The paper presents a new refined-modified solution of the fundamental two-dimensional problem of the elasticity theory on the perpendicular application to the boundary of the half-plane of a concentrated-linear constant load. In contrast to the similar classical Fleman problem, which is a special case of a simple radial stress state, all three stress components, two normal and one tangent, as well as an additional geometric parameter characterizing the width of the site of the external local force’s actual distribution have been taken into consideration. In addition, on the basis of the classical interpretation of plane deformation, the known contradictions are eliminated that are associated with the uncertainty of the angular displacement at the boundary of the half-space and with the constancy of the second kinematic component in the pursuit of the infinity coordinates of an arbitrary point of the base material. In the course of the research, it is proved that there are cylindrical surfaces where equal tensile stresses act which trajectories have the shape of circles. In a simplified Fleman solution of such curves- isobars are Boussinesq circles with constant the principal compressive stresses. The derived analytical dependences are presented in a rectangular frame of reference, which allows to quantify the following with a high accuracy: 1) stresses in the depth of the base in horizontal and vertical sections; 2) contact pressure and draft of the soil elastic surface under the sole of a rigid long foundation when the base, within the generally accepted assumptions, is assumed to be linearly deformable, homogeneous, isotropic, solid, experiencing a one-time load. The results of the developed generalized physical and mathematical model can serve as a conceptual basis used in solving special fundamental and applied problems of mechanics directly related to the refined calculation of the bearing capacity of various parts and structures, widely used in modern engineering and construction such as bearings, cylindrical rollers, gears, foundations strip foundations, pavements in their steel compaction rolls, etc.
Текст научной статьи Уточненная плоская механико-математическая модель для определения напряжений в основании ленточного фундамента и его упругой осадки
ВЕСТНИК ПНИПУ. МЕХАНИКА № 1, 2020PNRPU MECHANICS BULLETIN
Несущая способность оснований и фундаментов в значительной степени определяется правильной оценкой напряженно-деформированного состояния грунтов и рациональностью выбранных типов оснований [1-6].
Математическое моделирование и оптимальное проектирование современных зданий и сооружений во многом зависят от качества грунта в основании фундамента, которое без перенапряжения должно воспринимать все нагрузки, действующие на конструкцию, обеспечивая ее прочность, жесткость и устойчивость. И в этой связи любые исследования, связанные с модернизацией и совершенствованием методов расчета оснований фундаментов, являются актуальными и перспективными.
Представленная обзорно-тематическая научнопрактическая работа посвящена приложению новых формул фундаментальной двумерной задачи теории упругости [7, 8, 10-13, 17, 21, 27-29] к уточненной количественной оценке напряжений, деформаций и перемещений в основании длинного жесткого фундамента при его одноразовом нагружении [1, 3-6].
Рассмотрим сосредоточенную нагрузку Р , нормальную к границе х = 0 упругодеформируемой полуплоскости х > 0 , материал которой - однородный, сплошной,
изотропный и подчиняется закону Гука, а распределение силового параметра Р по координатной оси z является равномерным (рис. 1).
Существует фундаментальное решение этой задачи, называемое простым радиальным напряженным состоянием
, 2 • P cos 0
° r = ° r ( r ,0 ) =---- ,
π r
°в = т = 0, I 0
п I
2 J ,
которое получил в 1892 г. французский ученый А. Фламан [7-10] на основе осесимметричной пространственной математической модели Буссинеска [3, 14, 15]. Формулы (1) удовлетворяют двум уравнениям равновесия без учета объемных сил и условию сплошности среды или уравнению Мориса Леви в полярных координатах r , 0 [7, 8, 10-12, 27-23]:
1 д с„ д т 2 • т „ ---- + — +--= 0, r д 0 д r
r
1. dL + д°т. । °r - °0 =0. r д0 дr r ’
d 2 1 д 1
----2 +-----+--2 д r r д r r
д2 L
—7 • (°r + °„) = 0;
д 0 2 J ( r 0 ’
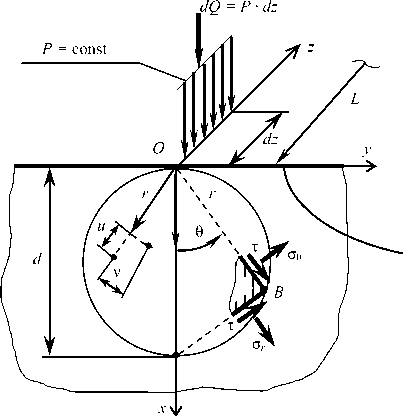
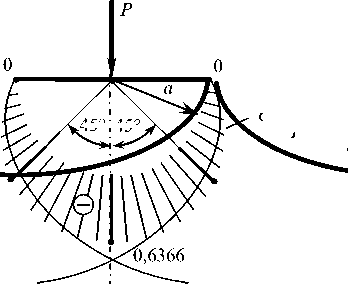
Рис. 1. Расчетная схема напряженного состояния в плоскости xOy
Fig. 1. Design scheme of stress-strain state in the xOy plane
P

O
K y t—>
( r )
l
--->
где g, g6, т - нормальные ( or, o6 ) и касательное ( т ) напряжения в произвольной точке В полуплоскости (см. рис. 1).
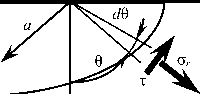
Граничные условия также соблюдаются, вследствие того что функции ое и т тождественно равны нулю, а результирующая P • dz внутренних усилий ^г по принципу Сен-Венана [27–29] заменяется эквивалентной нагрузкой, распределенной по поверхности полуцилиндра малого радиуса ar , т.е.
ππ dz• J Gr ■ a• cosO• d6 = -^ ^ ^z • jcos26• d6 = -P• dz. (5)
"п п 0
Оказывается далее, что если провести окружность произвольного диаметра d с центром на оси х, касающуюся верхнего края полуплоскости, где приложена сила Р (см. рис. 1), то для любой точки В этого круга, за исключением нулевой [7, 8, 14], d • cosO = r (6)
и на основании (1)
2 • P
Gr =--= const. (7)
r п • d
При этом и наибольшее касательное напряжение τ также остается постоянным [8, 20, 21]: max
° A — ^rP
T max = ^^^ = —7 = const.(8)
2п
Продолжая решение задачи в напряжениях (1), Фламан [9] вывел функциональные соотношения для радиального u = u ( r , 6 ) и кольцевого v = v ( r , 6 ) перемещений точек, расположенных на границе x = 0 по-
π луплоскости при 6 = ± — (см. рис. 1), что, как известно, имеет большое практическое значение для многих технических приложений, связанных прежде всего с физико-математическим моделированием плоских контактных задач [17–20], лежащих в основе расчета подшипников скольжения, цилиндрических катков [15, 17, 26, 32], балок на упругом основании [21, 33] и т.д. Соответствующие формулы применительно к плоской деформации выглядят следующим образом [2, 17]:
u

( 1 + ц ) ^ ( 1 - 2ц ) • P
2 • E
v Г

= const,
_ 2 • P . ( 1 - ц 2 )
п • E
• ln - ; (10)
где E , μ – модуль упругости и коэффициент Пуассона материала; l – координата произвольно выбранной точки K оси y ( r ) (см. рис. 1), где
Перемещение v считается положительным, если оно направлено в сторону увеличения угла θ [7]. В дан-
„L п) п) ( ном случае vI r, — | = -vI r,— I (см. рис. 1), и это от-
ражено в равенстве (10).
Можно заметить, что классические зависимости (9), (10) содержат известные и физически не обоснованные противоречия о том, что в случае r = ^ (согласно принципу Сен-Венана [7]) обе функции – (9), (10) – должны равняться нулю, т.е.
^п ur ад , ± —
Г I 2
п | |
— = -v ад,— = 0,(12)
2 I I
однако условия (12) не соблюдаются, так как при r = го
lim и Б ( r ) = lim v E ( r ) = 0. (15)
r ^ro x 7 r ^to x 7
иг = const, | v r | = ro.
Парадоксальный результат (13) не соответствует и базовому решению Буссинеска (рис. 2) [7, 14, 21], в случае перпендикулярно направленной силы Р на полупространство, в котором отсутствуют вышеуказанные противоречия на граничной плоскости и x = 0 , как следствие,
-Б ( r P . ( 1 - 2-, )^( . + и ) . 1 = и Б ( r ) ,
2 -п- E r
P-(1-и2 ) 1
vб = v (r ,0) =------7.---= vб (r);
п- Er
откуда, в предельном случае r = ro, получаются нуле- вые ответы:
Для устранения физико-математической некорректности – парадокса (13) – вводим максимально расширенную, по сравнению с (1), модификацию напряженного состояния, возникающего в упругодеформируемой полуплоскости (см. рис. 1):
оr = оr (r,9) * 0, o8 = o8 (r,9) ^ 0, т = т (r,9) ^ 0,
π
0 < r < ro ,0 < 9 < ± —.
,2
Горизонтальная черта над буквенными символами является отличительным признаком принадлежности того или иного параметра к усовершенствованной расчетной модели, изображенной на рис. 1.
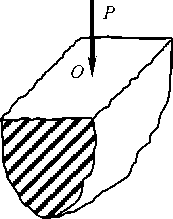
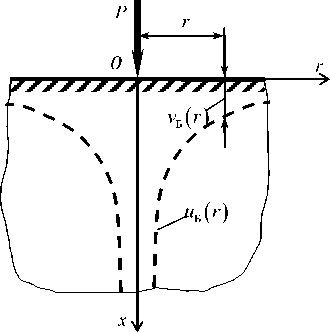
Рис. 2. Пространственная расчетная модель Буссинеска [7, 14, 17] и общий гиперболический характер изменения краевых функций v E ( r ) , иь ( r ) в виде пунктирной кривой линии
Fig. 2. The Boussinesq spatial analysis model [7, 14, 17] and the General hyperbolic nature of the vE (r), uE (r) edge functions’ change - a dashed curve line
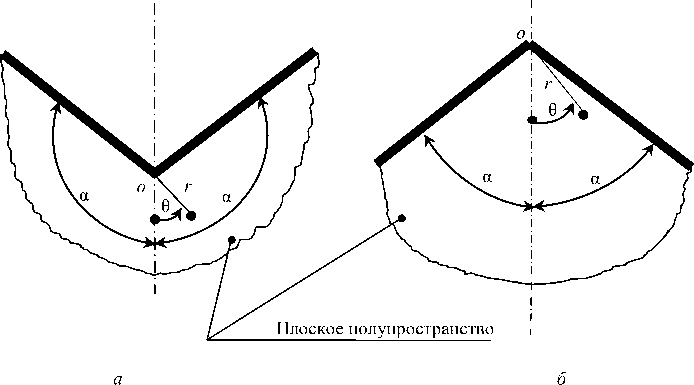
Рис. 3. Схемы углового выреза ( а ) и клиновидной области ( б ), математически аппроксимируемые выражением (17)
Fig. 3. Schemes of angular cut ( a ) and wedge-shaped region ( b ), mathematically approximated by the expression (17)
В процессе определения внутренних силовых характеристик о , de , т используем общую фундаментальную формулу [7]
Ф = ф ( r ,9 ) = rX + 1 •[ CT • cos ( X + 1 ) 9 + C 2 • cos ( X - 1 ) +
+ C • sin ( X + 1 ) 9 + C • sin ( X - 1 ) 9 ] , (17)
0 < r < го, 0 < 9 < ± a, функции напряжений ф = ф (r,9), применяемую для расчета элементов конструкций, имеющих форму вырезов и клиньев, включающих угловую точку «О» и плоские боковые поверхности, ограничивающие однородное изотропное полупространство (рис. 3).
Зависимость (17) содержит 6 констант X > 0 (любое число), 0 <а<п,C , C , C 3, С 4, которые подбирают, руководствуясь конкретной расчетной схемой, граничными условиями и физико-математическим смыслом рассматриваемой задачи. Доказано также [7], что функция (17) является точным решением однородных дифференциальных уравнений (2)-(4) [7-11, 23, 27] в случае
_ 1 дф 1 д2 ф _ д2 ф о r = о r =---+ —г--7, о9 = о9 = —-, r dr r2 д92 дr2
_ 1 д ф 1 д 2 ф д f 1 д ф )
т = т = —-------=------ .
r 2 д 9 r д r • д 9 д r у r д 9 J
Учитывая специфические особенности осесимметричной модели рис. 1, сформулированную уточненную задачу в напряжениях (16) и возможность устранения противоречий (13), принимаем в аппроксимации (17) и на рис. 3, а, б: X = -2 ,а = П = 90°, С = С = 0. В результате, на основании (18) и [7, 22] будем иметь:
О = -2• r"3 •(C • cos9+5• C • cos39),
О = -2 • r3 •(C • cos9+C • cos39), т = 2• r"3 •(C • sin9+3^C2 • sin39),
Первое граничное равенство ов| r, ± П | = 0(22)
θ выполняется, а из второго краевого условия т| r,±П | = 0(23)
I 2J находим
С1 = 3-С2, и тогда, с учетом известных замен [22], cos 39 = 4 • cos39 - 3 • cos9, sin 39 = 3 • sinO - 4 • sin3O,
получаем с точностью до постоянной С 2 функциональные соотношения:
о = о(r,9) = -8• C • r 3 •(б• cos39-3*cos9),
О = о (r, 9) = 8 • C • r-3 • cos39, т = т(r,9) = 24• C2 • r3 •(sin9-sin39).
Для определения коэффициента С 2 , по аналогии с моделью (1) [7-11], вырезаем из полуплоскости
(см. рис. 1) элемент, ограниченный цилиндрической поверхностью малого радиуса а <^ r. Далее проектируем на ось х внутренние силы, действующие по криволинейной границе полуцилиндра, и внешнюю нагрузку Р :
п
УX = 0, ^2• dz• J(or • cos9-т^sin9)| ^ х х а • d9+P • dz = 0. (29)
Раскрывая с помощью [22, 25] и (26), (28) интегралы в уравнении равновесия (29) при r = а , вычисляем константу С 2 :
п
16 • С L . , , .
—• j( 5 • cos 4 9 - 3 • cos 2 9 + 3 • sin 2 9 - 3 • sin 4 9 ) • d 9 = P , (30) a 0
16 • С, f 15 • n 3 •п 3 •п 9 • п) „ „ P • a 2
-+= P, ^ С = a2 ( 16 4 4 16 J 2 6 • n
Исключая С 2 в соответствии с (31) из зависимостей (26)-(28), представляем три компоненты напряжений согласно предпосылке (16):
- " ( 4 • P• а о r =о r (r,9 ) =-------
3 • п
( 5 • cos39 - 3 • cos9 )
- / 4 • P • а2 cos 3 9
°е ( r,9 )
3 • п
_ 4• P • а 2 ( sin9 - sin3
т = т ( r , 9 ) =--------
π
0 < r <^ ,0 < 9 <± П . 2
Подтверждено практическими расчетами и исследованиями, что фактическое перераспределение давления по подошве жесткого фундамента с равнодействующей P незначительно изменяет напряжения в грунте на глубине менее половины размера 2 а [1, 3-6].
Полученные функции (32)–(34), в отличие от известных формул (1) [7–11], включают дополнительный параметр а 2, появление которого возможно обосновать [7], так как расчетная схема рис. 1 является идеализированной. В точке приложения линейной сосредоточенной нагрузки Р теоретические напряжения Ог=Ог ( 0,9 ) =
= О = О ( 0,9 ) = т = т ( 0,9 ) = го , поскольку конечная сила Р при r = 0 действует на бесконечно малой площади.
a
° ■“ r P
a
0,4502
45° 45°
0,4502
б
P
a
0,3796
9,2
0,8488
ст „ • — θP
0,49
a
aa
ст9 ■ — = т ■ — = 0
Ось симметрии
–35,26
a
т ■ —
P
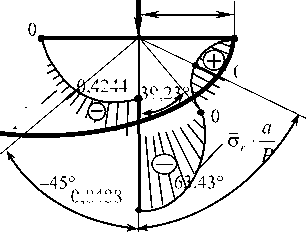
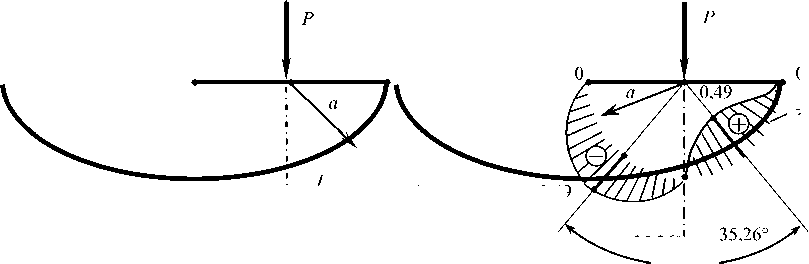
Рис. 4. Безразмерные эпюры напряжений на полуокружности произвольного радиуса r = a : а – по фундаментальной модели (1) [9]; б – в соответствии с выведенными формулами (32)–(34)
Fig. 4. Dimensionless stress diagrams on a semicircle of arbitrary radius r = a : a ) on the fundamental model (1) [9]; b ) according to the derived formulas (32)–(34)
Фактически же нагрузка Р распределяется на площадке хотя и малой, но конечной ширины, в качестве которой будем принимать линейный размер 2 а (см. рис. 1). Численное значение а либо может быть задано, как при исследовании давления жесткого плоского штампа шириной 2 а на упругое тело-полуплоскость [18–20], либо определяется в ходе решения конкретной прикладной задачи, например – контактной о первоначальном взаимодействии по линии z (см. рис. 1) двух параллельных цилиндров, когда параметр а является переменной величиной [17–19], зависящей от Р и физико-геометрических характеристик рассматриваемой механической системы.
Сравнительная оценка решений (1) и (32)–(34) наглядно проиллюстрирована на рис. 4 в количественном и качественном отношениях. Продолжая уточненное решение задачи с использованием формул (6), (32)– (34), легко доказать, что, как и в классическом случае (1) (см. рис. 1), существуют круги Буссинеска [14, 27], или линии равных напряжений (изобары [1, 8]), наличие которых экспериментально подтверждено результатами поляризационно-оптических исследований на лабораторных образцах из прозрачных материалов [28]. В расширенной модели (32)–(34) такими изобарами будут окружности с одинаковыми растягивающими напряжениями (рис. 5)
_ 4 ■ P ■ aг
СТ =^--
3 ■ п
cos 3 θ
4 ■ P ■ аа
■
( d ■ cos 0 ) 3 3 ■ п ■ d 3
= const. (35)
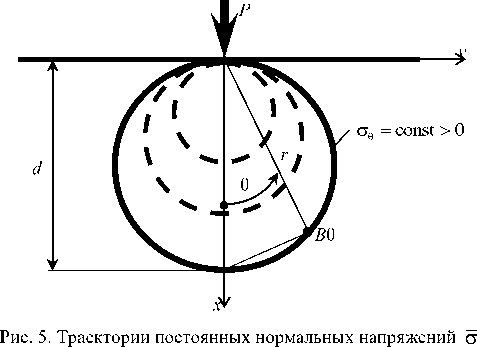
Fig. 5. Trajectories of стд constant normal stresses
θ
В инженерной практике при расчете фундаментов необходимо знать распределение напряжений в массиве основания фундамента по горизонтальным и вертикальным сечениям [1–6]. Поэтому переходим с помощью известных аналитических зависимостей [7, 8, 11, 27] (см. рис. 1)
r = 4x 2 + У 2, cos0 = x , sinQ = y ; (36)
rr для одного горизонтального уровня х = а (эпюры ох, ох, т, т^ ) и одного вертикального сечения у = а п = о • cos2 0 + оА - sin2 0 - 2 - т - sin0 - cos 0, xr θ о = ог - sin2 0 + ое - cos2 0 + 2 - т - sinO - cosO,
^ (37)
т^ = т^ = (ог - о9) - sin 0 - cos 0 + т - ( cos 2 0 - sin 2 0 )
(эпюры о , о, ). Наибольшие расчетные значения функций о x ( a , y ) , т yx ( a , y ) , о x ( 2 a , y ) , т yx ( 2 - a , y ) , о ( x , a ) , о ( x ,2 - a ) в виде [8, 29]
от напряжений (32)-(34), т.е. ог ( r ,0 ) ,о0 ( r ,0 ) , т ( r ,0 ) , выраженных через полярные координаты r ,θ , к соответствующим внутренним силовым факторам о x ( x, y ) , о y ( x, y ) , т xy ( x, У ) = т yx ( x, y ) в декартовой си стеме отсчета xOy (рис. 6) при допущении [1–6], что грунт представляет собой сплошное линейно-деформи-руемое однородное тело:
o (( max ) ( a ,0 ) =- 0,6366 - P , о(т тах ) ( 2 - a ,0 ) =- 0,3183 - P ;
_ _ , x 8 - P - a2x о= о( x, y) =----г,(38)
xx3
3 - n ( x 2 + y 2 )
т(”ах >( a , ± 0,577 a ) = +0,207 - P , 4 m x >( 2 - a , ± 1,15 a ) = +0,104 - P ;
>
о у = о y ( x , у ) =
4 - P-a2 x - ( x 2 + 3 - У 2 ) 3п - ( x 2 + y 2 ) 3 ,
т xy =т yx ( x , У ) = " 4-P- π
a 2
x 4 - y
( x 2+ y 2 ) 4 ,
о ( max ) ( 0,577 - a , a ) = - 0,207 - P , a
о ( max ) ( 1,15 - a ,2 a ) = - 0,104 - P
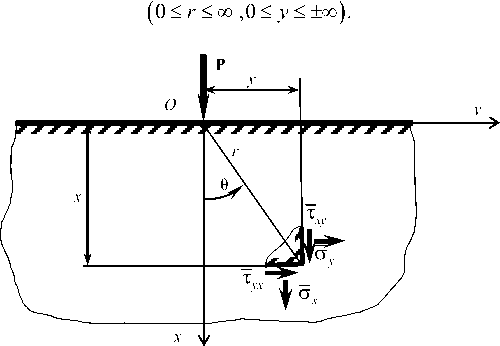
Рис. 6. Схематическая модель к определению напряжений ох, о y , т xy , =т yx по формулам (38)-(40)
Fig. 6. The schematic model for stress determination ох , оу , т xy , =т yx by formulas (38)-(40)
отмечены на рис. 7, б для двух сечений x = a и y = a , а экстремумы зависимостей ох ( a , у ) , ох ( 2 - a , у ) , т yx ( a , У ) , т yx ( 2 - a , y ) , о y ( x , a ) , о y ( x ,2 - a ) , как и
( max ) ( max )
упрощенные - ох (a,0) , т^ (a,0) , о^max) (0,577 - a, a) (см. (42)-(44)), удовлетворяющие необходимым условиям [22, 29]
дт д т до д о
^Z x. = ^°l = о, _ x L = _x L = о, = = о, (45)
д y д у д у д у д x д x
записываются следующим образом (см. рис. 7, а ):
о^ )( a ,0 ) = - 0,8488 - P , о ( max ) ( 2 - a ,0 ) =- 0,1061 - P ;
>
т У т” ) ( a , ± a ) = +0,0796 - P , yx a
Vmax ) ( 2 - a , ± 2 - a ) = +0,0099 - P ;
yx a
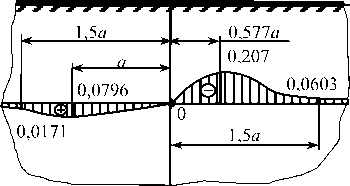
Рис. 7, а , б иллюстрируют соответственно уточненные эпюры ох, о^ , т и построенные по классическим аналитическим соотношениям [8, 11, 27, 29]
о (, max ) ( 0,972 - a ,2 - a ) = - 0,0675 - P ;
где место максимума функции о^ (x, y), т.е. координата хо, в общем случае при любой величине переменной y, определяется выражением xo = у - 445-2.
Анализ расчетных данных (42)–(44), (46)–(48) и характера эпюр рис. 7 позволяет отметить некоторые принципиальные особенности новых формул (38)–(40).
Прежде всего, это существенно большие численные абсолютные значения экстремальных нормальных ( max ) ( max ) ( max ) ( max )
напряжений a; 7 > a; 7 , aу 7 > aу 7 и пони женная касательная составляющая |тУmax)| <с | T^mах^| в прямоугольной области 0 < x < a , —a < у < a, близкой к границе (подошве) фундамента. Во-вторых, равенство нулю параметра σ в точках, расположенных на оси симметрии х при у = 0 (см. (41)), по сравнению с
. 4. P • a3
av (x, 0) =-------- ^ 0, 0 < x < ад,
yV 7 3 • п • x3
и различие в знаках напряжений ay < 0, a > 0. По мнению авторов этой работы, граничное неравенство a > 0 и условие (50) являются более объективными с физико-механической точки зрения (см. рис. 6, 7).
С целью вычисления перемещений u и v верх- ней границы x = 0 материала упругой среды (см. рис. 1) дополняем соотношения (32)–(34):
• дифференциальными уравнениями Коши
[7, 8, 10, 11]
8, = 8 r ( r , 9 ) = dL,
- * а - эпюра q
*
б – эпюра σ
—*
а - эпюра т xy
*
б – эпюра τ yx
a
a
Р
O
x
—*
а - эпюра a
P
*
б – эпюра σ
0,486 a
0,54
0,2122
0,0238
О
0,577 a

0,207
a
a
x
0,1592
0,0509
a
Ось симметрии
Рис. 7. Эпюры безразмерных напряжений a*, a*, т*у, T*yx, a* , a* в виде соответствующих размерных характеристик, умноженных на a • P—1: а - по уточненной физико-математической модификации (38)-(40); б - в соответствии с формулами (41), базирующимися на фундаментальном решении Фламана (1)
Fig. 7. a*, a*, т*,, T* , a* , a* dimensionless stress epures in the form of the corresponding dimensional characteristics multiplied x x xy yx y y by a • P—1: a - on the refined physical and mathematical modification (38)-(40); b - according to the formulas (41) based on Flamant fundamental solution (1)
- - / 1 dv и e6 =e6(r,6) ■ r 56 r
_ 5 v v 1 5 u
Y = Y( r,6 ) = ----+ - —, dr r r d6
связывающими относительные деформации с функциями u = u ( r , 6 ) , V = V ( r , 6 ) ;
e r ,
|
(52) |
X r 2 |
|
(53) |
v = v ( r , 6 ) = |
|
e , у |
[ 3 • ц • sin6 + ( 1 — 4 • ц ) |
2 • P • a 2 • ( ! + ц )
3 • п • E r2
• (1 — ц) • cos6 — (5 — 4 • ц) • cos 3 6 1
( ) (----------------- ] + Z ( 6 ) ,
• sin 3 6 1
------] — fz ( 6 ) • d 6 + ^ ( r ) ;
• зависимостями закона Гука для плоской деформации
где из очевидных кинематических условий задачи
e z =e г ( r , 6 ) = 0
u ( ro , 6 ) = 0, v ( r , 0 ) = 0
в классической интерпретации [8-12]:
° г = ° г ( г , 6 ) = р( ° r +О б ) =
4 • P • aг
ц- ( 3 • cos 6 - 4 • cos3
3 • п
r 3
,
следует принять при r = от и 6 = 0 (см. рис. 1)
С ( еМ ( r ) = 0.
1 e r ="
—
μ 2
•
E
μ r — 1--°6
1 — ц
4 • P • a 2 - ( 1 + ц ) [ 3 -( 1 — ц ) • cos6 — ( 5 — 4 • ц ) • cos36 ]
Выражения (61), (62) с учетом (64) подставляем в третье физико-геометрическое равенство правых частей соотношений (53) и (58), которое соблюдается тождественно.
Наличие аргумента r 2 в знаменателе гиперболических зависимостей (61), (62) гарантирует выполнение необходимых пределов
3 • п • E
r 3
, (56)
lim u ( r , 6 ) = lim v ( r ,6 ) = 0 r ^ro r ^ro
1 ц 2 e 6 E
•
μ
6 — 1-- ° r
1 — ц
4 • P • a 2 * ( 1 + ц ) [ ( 1 + 4 • ц ) • cos 3 6 — 3 • ц • cos6 ]
3 • п • E
r 3
, (57)
Y =——
E
• т =
8 • P • a 2 • ( I + ц ) ( sin6 — sin36 )
п • E
r 3
; (58)
где ° - нормальное напряжение по направлению оси z (см. рис. 1).
Путем совместного рассмотрения формул (51), (52), (56), (57) получаем систему неоднородных дифферен-
циальных уравнений относительно перемещений V [7, 17, 23]:
u и
при нулевых значениях (64) произвольных переменных интегрирования Z ( 6 ) , ^ ( r ) для всех точек упругоде-формируемого материала рис. 1, аналогичных трехмерной модели Буссинеска (14), (15) [7, 14, 15] (см. рис. 2). В итоге полностью исключаются вышеуказанные противоречия (13) двумерного процесса Фламана [7-12], касающиеся полученных (61), (62) функциональных параметров u = u ( r ,6 ) , v = v ( r , 6 ) в ходе решения данной плоской задачи.
Воспользовавшись соотношениями (36) между переменными r ,6 и x, у , выражаем деформационные характеристики (61), (62), учитывая (64), через декарто-вые аргументы x , у (см. рис. 1):
X
d u _ 4 • P • a 2 ■ ( ! + ц ) d r 3 • п • E
_ . 2 • P • a 2 ^ ( 1 + ц )
u = u (x, у) =--------- X v 7 3 • п • E
[ 3 • ( 1 — ц ) • cos6 — ( 5 — 4 • ц ) • cos 3 6 j
x •
X —
[ 3 • ( 1 ц ) • У 2 — ( 2 — ц ) • x 2 ]
r 3
,
( х 2 + У 2 ) 2
,
X
5 v _ 4 • P • a ^ ( 1 + ц )
--+ u =-------------- X 5 6 3 • п • E
[ ( 1 + 4 • ц ) • cos 3 6 — 3 • ц • cos6 J
r 2
,
откуда, после интегрирования [22, 25],
_ _ 2• P • a 2 •П + ц )
u = u ( r ,6 ) =--------- x
V 7 3 • п • E
_ _ 2• P • a 2 ^ ( 1 + ц )
v = v ( x , у ) =---------------- x
( ) 3 • п • E
X
У ^[ 3 • ц • x 2 + у 2 ( 1 — ц ) ]
( х 2 + У 2 ) 2
.
Полагая в (66), (67) x = 0 , находим горизонтальное ur и вертикальное vr перемещения границы полуплоскости:
ur = u ( 0, у ) = 0, (68)
_ x 2 ' P ' a 2 '( 1 — H2 ) Г 1 )
V r = V r ( 0, у ) =-----—^------I —I . (69)
3 ■ n ■ E у у )
Правомерность расчета u r = 0 (см. (68)) можно обосновать тем, что в инженерно-технических задачах, например контактных [1–3, 18, 19, 27, 28], на действие поперечной эквивалентной силы P ± у при малых смещениях решающее влияние оказывает функциональный параметр V r = V r ( у ) , а компонента u r<с Vr не принимается во внимание.
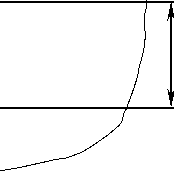
В связи с неопределенностью (произвольностью) координаты r = | у | = l^a закрепленной точки K (см. рис. 1) невозможно количественно сопоставить неправильное решение (10) [2, 7, 9, 17] и новый результат (69), однако в качественном отношении такую сравнительную оценку сделать вполне реально, и это показано на рис. 8, графики которого построены по безразмерным формулам
Рис. 8. Общий характер изменения функциональных зависимостей (10) и (69) в безразмерных интерпретациях (70) и (71): а - из решения Фламана [9, 10-12] при l = 6 a ;
б – по выведенной формуле (71) на основе (69)
* v Г*
= V Г (I у |)'
п ■ E
2 ■ P - ( 1 - н 2 )
- 6 ■ a
= ln-гт
*

= V Г ( У ) '
п ■ E
2 ■ P - ( 1 - H 2 )

Fig. 8. General nature of changes in functional dependencies (10) and (69) in dimensionless interpretations (70) and (71): a – from
Flaman solution [9, 10-12] at l = 6 a ; b - according to the derived formula (71) based on (69)
адекватным выражениям (10), (69), и по численным данным табл. 1.
Таблица 1
Значения функций (70) (71) при r = | у | > 0, l = 6a
Table 1
Functions value (70) (71) at r = | у | > 0, l = 6a
|
r =1 у |
0 |
a |
2 a |
4 a |
6 a |
8 a |
10 a |
∞ |
|
* v Г |
∞ |
1,7918 |
1,0986 |
0,4055 |
0 |
–0,2877 |
–0,5108 |
–∞ |
|
* v Г * |
∞ |
0,3333 |
0,0833 |
0,0208 |
0,0093 |
0,0052 |
0,0033 |
0 |
Из сравнения выражений (10) и (69) также следует, во-первых, полная определенность в знаке гиперболической функции V r ( у ) > 0, в отличие от логарифмической зависимости (10), вследствие четности V r ( у ) по переменной у2 при направлении смещения V r > 0 в сторону увеличения координаты х , а во-вторых – тот очевидный факт, что некорректная формула (10) аппроксимирует только относительную величину v r (| у |) на замкнутом интервале —1 < у < l , в отличие от уточненной квадратичной гиперболы (69), позволяющей определять абсолютную осадку границы % = 0 полуплоскости без привязки к точке K (см. рис. 1, 8) в неограниченном теоретически диапазоне —то < у < то.
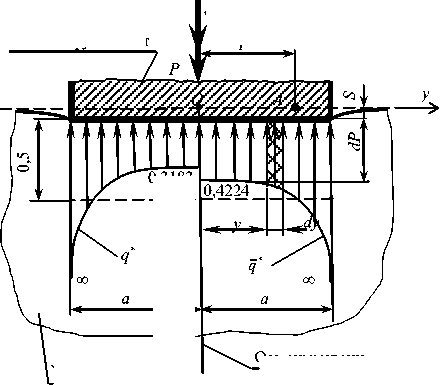
Далее переходим к определению реактивного давления q = q (у) и соответствующей ему упругой осадки S ленточного фундамента [1, 3–6] с шириной подошвы 2a (жесткого штампа) из решения классической контактной задачи [7, 10–12, 19, 20], основу которой, в соответствии с формулой (69), представляет новое неоднородное интегральное уравнение Фредгольма первого рода [10, 11, 30, 31] (рис. 9)
2 ■ a 2 ■ ( 1 — н 2 ) a q(y )■ dy
--V) = f ( t ) = S = const, (72)
3 ■ п ■E —a (t — у )2 JV)V где q = q (у) - искомая силовая функция в виде реакции полуплоскости на участке
—a < у < a, приводимая к известной равнодействующей Р, согласно условию равновесия [10, 11, 17–19]
a
Jq (у )■ dy = P(74)
—a при допущении, что сила Р проходит через середину фундамента (см. рис. 9); t – вспомогательная переменная, изменяющаяся в пределах —a < t < a и представляющая собой координату произвольной точки А, вертикальное перемещение которой от элементарной нагрузки dP = q (у )■ ау (75)
составляет (см. (69) и (72))
2■ a2 ■(!—ц2) q (у)■ dy d vT =-------- ■ ——--
3 ■ п ■ E
C
a
j ^
—
y 2
V а 2 — у2

с учетом обоснованного практикой допущения [1, 4, 5] об отсутствии касательных напряжений τ (сил трения) на жесткой прямолинейной границе x + 5 , когда заданная функциональная зависимость f ( t ) [30] равна осадке 5 = const фундамента (рис. 9 и формула (72)).
Q = p- р ■ а Заданная нагрузка
Жесткий фундамент
0,3183
Ось симметрии
Упругое основание
Рис. 9. Расчетно-графическая модель контактной задачи
Fig. 9. Computational and graphical model of the contact problem
т.е.
' а 2 — уг
a 2 y y
--arcsin — + а ■ arcsin —
a
a
a
— а
3 -л- а2
C =
2 ■ P
3 ■л■ а2
Подставляя q ( у ) в соответствии с (77), (79) в исходное уравнение (72), получаем, раскрывая необходимые для этой процедуры интегралы [22, 25]:
q ( у ) =
2 ■ P
3 "Л" а а

—

— а < у < а ; (80)
4-(1—ц2)■р J 9■П ■ E j
y 2
■ йу =
В отличие от абстрактно-идеализированного оригинала (69), в котором направления силы P и перемещения v r > 0 совпадают (см. рис. 8), в формулах (72), (76) знак «минус» указывает на противоположность действия контактного давления q ( у ) - вверх и кинетической характеристики v r > 0 - вниз (см. рис. 9).
Уравнение (72) решаем обратным методом [27, 30, 31], руководствуясь экспериментальными данными [1, 5, 6], показывающими, что реактивная нагрузка q ( у ) распределяется неравномерно по подошве жесткого фундамента (штампа), увеличиваясь теоретически до бесконечности по краям у = ± а и понижаясь к центру поверхности контакта (см. рис. 9). Основываясь на опытных результатах [1, 3–6] и после многократных проверок различных функций, аппроксимируем контактное давление q ( у ) следующей аналитической зависимостью:
Замена переменной у :
t — у = w, ^
у = t — w, йу = — dw
4■(l— ц2)■P
--------5-------X
9 ■п 2 ■ E
X In
q =
q (У ) = C ■ Vа 2 — у2
2 a 2

где С – постоянный коэффициент.
Вычисляем константу С из равенства (74) с использованием справочных таблиц [25]:
X j
V
V— w 2 + 2 ■ t ■ w + а 2 — t1 w 2
+ а2 ■ j
dw
w
—w2 + 2 ■ t ■ w + а2
4■(l— ц2)■P
= -------9--- X
9 ■ п 2 ■ E
dw +
—
t 2
( 2 ■ а 2 — t 2 ) ■ V — w 2 + 2 ■ t ■ w + а 2 — t 2 w ■ ( а 2 — t 2 )
+ t l_ ( а 2 — t 2 ) ■ V O 7— ? 7
2 ■ t ■ w + 2 ■ ( а 2 — t 2) + 2 ■ V а 2 — t2 ■ V— w 2 + 2 ■ t ■ w + а 2 — t2
w
—2 ■ w + 2 ■ t
+ arcsin — =
J4 ■ t 2 + 4 ■ ( а 2 — t 2 )
4^(1— Ц2)■р Г . —2■ t + 2■ у + 2■ t
—-—— --arcsin—= =
9^п ■E L V4■ t2 + 4■ а2 — 4■ t2
( 2 • a 2 - t 2 ) • 7 - t 2 + 2 • t • y - y 2 + 2 • t 2 - 2 • t • y + a 2 - t2
( t - y ) • ( a 2 - t 2 )
t 3
+--, x
( a 2 - 1 2) • xa 1
полученным на основе логарифмической зависимости (10), базирующейся на упрощенной модели Флама-на [7–11] простого радиального напряженного состояния (1) (см. рис. 1). Итоги этого сравнения приведены в табл. 2 и на эпюрах рис. 9 в безразмерной модификации
x In
X In
2 • 1 2 - 2 • 1 • y + 2 • a 2 - 2 • 1 2 + 2 • V a 2 - 1 2 • 4 a 2 - y y t - y
t 3
( a 2 - 1 2 ) • x!T7
3 • n


2 • 1 2 - 2 • 1 • y + 2 • a 2 - 2 • 1 2 + 2 • 4a 2 -
1 2 •
y 2
*
a
t - y
q = q • P= —г Пч /1
—
y 2 a 2
- a < y < a .
4 • ( l -ц 2 ) • P
9 •n 2 • E
•
y arcsin
( 2 • a 2 - 1 2) • ДО" - ?
( t - y ) • ( a 2 - 1 2 )
t 3
+ ( a 2 - 1 2) • Ди2 - !
Таблица 2
Численная информация к построению эпюр реактивных давлений
x ln
- 2 • 1 • y + 2 • a 2 + 2 • V a 2 - 1 2 • 4a 2 - y2 t - y
Numerical information to plot the reactive pressure epure
4 • ( l -ц 2 ) • P
—-----X
9 • n 2 • E
1 3 , ( - 1 + a ) • a • ( 1 + a )
+-- - • In -----------------------
( a 2 - 1 2 ) • V a 2 - 1 2 ( 1 - a ) • a • ( 1 + a )
4 • ( l -ц 2 ) • P = 9 •n 2 • E
•
откуда будем иметь
S =
n +--
( a 2
t 3
—
t 2 ) • ДД
—
= • ln| - 1| , (81)
t 2
4 • ( l -Ц 2 ) • P
9 •n 2 • E
= const,
что подтверждает правильность подобранной функциональной зависимости (80), являющейся точным решением интегрального уравнения (72), когда P = const (см. рис. 1), а ширина подошвы фундамента 2 а и ее проектная длина L находятся в соотношении L ( 2 a ) 1 > 10 [1, 4–6], обеспечивающем адекватность и механикоматематическую корректность использованной здесь расчетной схемы плоского деформированного состояния (32)–(34), (38)–(40), (54)–(58).
Представляет практический интерес оценка предложенной уточненной аппроксимирующей формулы (80) с точки зрения ее сопоставимости с классическим результатом С.А. Чаплыгина и М. Садовского [7, 8, 11]
P q=q(y)=—/2 2, - a - y" a, (83)
n 4a - y
Table 2
|
y |
0 |
±0,2 a |
±0,4 a |
±0,6 a |
±0,8 a |
±0,9a |
±a |
|
—* q |
0,4244 |
0,4245 |
0,426 |
0,435 |
0,481 |
0,5793 |
∞ |
|
q * |
0,3183 |
0,3249 |
0,3473 |
0,3979 |
0,5305 |
0,7302 |
∞ |
Приводим также характерные величины реактивных распределенных сил, согласно выражениям (84), (85) (см. рис. 9):
– минимальные давления в центре « О » площадки контакта при y = 0
_ PP qmin = 0,4224 • -, q_ = 0,3183 • -;
aa
– средние значения
P q ср = q ср =0,5 • -.
a
В обоих случаях (84) и (85) мы имеем для угловых точек у = ±a (см. табл. 2 и рис. 9)
q ( ± a ) = q ( ± a ) = да. (88)
Совершенно очевидна зависимость осадки S от линейного размера 2 а . Для учета этого параметра в соотношении (82) отметим прежде всего тот факт, что в условиях плоской деформации (54)–(58) теоретическая длина линейно-полосовой сосредоточенной силы P равна бесконечности по направлению координаты z <да (см. рис. 1). Вследствие этой особенности вводим в решение поставленной контактной задачи общую известную рабочую нагрузку Q на фундамент, распределяя ее равномерно по реальной длине L = в • a его подошвы (см. рис. 1 и 9):
L
dQ = P■ dz,Q = P-Jdz = P■ L, оP =
Q Q
L в ■ a ’
где в — 20 - параметр, учитывающий необходимую для реализации плоской деформации фактическую разницу между продольным L и поперечным 2 а размерами контактной поверхности [1, 3–6], о чем уже было отмечено ранее в пояснении к зависимости (82); с другой стороны, произведение Q ■ в - 1 можно считать частью нагрузки Q , действующей на элемент штампа с площадью основания 2 a х а.
С учетом (89) формула (82) приобретает необходимый окончательный вид
S = S ( а ) =
4 ■ Q-(1 -ц2)
9 ■ п ■ E ■ в ■ а ’
и при этом в случае а ^ 0 абсолютная деформация грунта S ^го при фиксированной нагрузке Q . В этой же связи с увеличением а , т.е. ширины граничной плоскости x = 0 (см. рис. 1), осадка S будет уменьшаться, что реально и конструктивно обосновано.
За пределами фундамента (см. рис. 9) на интервале — а > у > а , по аналогии с базовой квадратичной функцией (69), его вертикальное перемещение S y может быть аппроксимировано гиперболической зависимостью
S y = S y ( у ) = S ■ . (91)
Естественно, что когда у = ± а ,
Sy = S =
4 ■ Q ■(I—ц2)
9 ■ п ■ E ■ в ■ а ’ а если у ^±го, то S (±го) ^0 ; например, уже на расстоянии у = ±5а и у = ±10а будем иметь соответственно: Sy (±5а) = 0,04 ■ S и Sy (±10а) = 0,01 S.
Комплексный анализ проведенных исследований позволяет сделать следующие выводы:
-
1. Представленное в данной фундаментально-прикладной работе усовершенствованное инновационное решение известной многофункциональной классической задачи Фламана [7–13, 27–29] является принципиально новым и уточненным по существу, так как учитывает три напряжения □ ,., ад, т , в сравнении с одной компонентой σ в [7–11], а также дополнительный параметр 2 а , характеризующий ширину малой площадки распределения ло-
- кальной нагрузки Р, действующей по направлению нормали к границе полуплоскости (см. рис. 1).
-
2. Доказано существование цилиндрических поверхностей, где растягивающие тангенциальные напряжения □;, = const > 0 (35) остаются постоянными на круговых образующих – изобарах (см. рис. 5). Аналогичные окружности Буссинеска [8, 11, 14, 27, 29] в виде сжимающих радиальных напряжений ar = const < 0 (7) выявлены и подтверждены экспериментально-теоретически (см. рис. 1) в упрощенной модели Фламана [28].
-
3. На основе классической модификации плоской линейно-упругой деформации (54)–(58) выведены формулы функций перемещений (61), (62), (66)–(69), не имеющие противоречий – парадокса (13) [7, 11, 12, 17], вследствие равенства нулю, когда радиальная переменная r стремится к бесконечности, что свидетельствует о их корректности и адекватности с физико-механической точки зрения (см. рис. 8).
-
4. Получено точное решение (80), (90), (91) фундаментально-прикладной контактной задачи теории упругости о взаимодействии бесконечно длинного жесткого штампа с прямолинейной границей x = 0 деформируемого однородного полупространства (см. рис. 9), материал которого подчиняется обобщенному закону Гука (55)–(58). В отличие от существующего типового решения (1), (9), (10), предложенная механико-математическая модель (32)–(44) позволяет определять не только реакцию основания (80), но и абсолютные вертикальные перемещения (90), (91) (а не идеализированное относительное (10) [17–20] с привязкой к произвольно расположенной точке K (см. рис. 1)) поверхности контакта в неограниченном диапазоне изменения переменной —го < у < го (см. рис. 9). С помощью существующих методик и алгоритмов [7, 8, 17–20] можно вычислить только контактные усилия, но не граничные перемещения края полуплоскости [19], где x = 0 (см. рис. 1 и 9).
-
5. Результаты разработанной физико-математической модели, доведенные до расчетных аналитических зависимостей (38)–(40), (90), (91) в декартовых координатах х , y (рис. 6) и проиллюстрированные соответствующими характерными эпюрами (см. рис. 7 и 9), возможно непосредственно использовать для уточненной оценки напряженно-деформированного состояния оснований жестких длинных (ленточных) фундаментов и их упругой осадки [1–6], а также при решении специальных задач [12, 13, 18–20], возникающих в процессе проектирования разнообразных контактирующих деталей и конструкций, применяемых в современном машиностроении [2, 15, 26, 32] и строительстве [1–6, 33].
Список литературы Уточненная плоская механико-математическая модель для определения напряжений в основании ленточного фундамента и его упругой осадки
- Далматов Б.И. Механика грунтов, основания и фундаменты (включая специальный курс инженерной геологии): учебник. – 3-е изд., стер. – СПб.: Лань-Трейд, 2012. – 416 с.
- Справочник проектировщика: расчетно-теоретический / под ред. д-ра техн. наук, профессора А.А. Уманского. – М.: Госстройиздат, 1960. – 104 с.
- Леденев В.В. Несущая способность и деформативность оснований и фундаментов при сложных силовых воздействиях: монография. – Тамбов: Изд-во ТГТУ, 2015. – 324 с.
- Механика грунтов, основания и фундаменты: учебник / Л.Н. Шутенко, А.Г. Рудь, О.В. Кипаева [и др.]; под ред. д-ра техн. наук, професоора Л.Н. Шутенко. – Харьков: Изд-во ХНУГХ им. А.Н. Бекетова, 2015. – 501 с.
- Пилягин А.В. Проектирование оснований и фундаментов зданий и сооружений: Электронный курс. – М.: Изд-во АСВ, 2017. – 398 с.
- Федулов В.К., Артемова Л.Ю. Проектирование оснований и фундаментов зданий и сооружений: учеб. пособие. – М.: МАДИ, 2015. – 84 с.
- Тимошенко С.П., Гудьер Дж. Теория упругости / пер. с англ. М.И. Рейтмана, под ред. Г.С. Шапиро. – М.: Наука, 1975. – 576 с.
- Киселев В.А. Плоская задача теории упругости: учеб. пособие для вузов. – М.: Высшая школа, 1976. – 151 с.
- Flamant A. Sur la repartition des pressions dans un solide rectangulaire charge transsversalement // Comptes rendus des sé-ances de l'Academie des Sciences. – 1892. – Tome 114, 1 Semestre. – № 22. – P. 1465–1468.
- Лурье А.И. Теория упругости. – М.: Наука, 1970. – 940 с.
- Шарафутдинов Г.З. Некоторые плоские задачи теории упругости: монография. – М.: Научный мир, 2014. – 464 с.
- Сапунов В.Т. Задачи прикладной теории упругости: учеб. пособие для вузов. – М.: Изд-во Нац. исслед. ядер. ун-та «Моск. инж.-физ. ин-т», 2011. – 208 с.
- Тен Ен Со. Решение задач теории упругости с при-менением Mathcad 14.0: учеб. пособие. – Хабаровск: Изд-во Тихоокеанск. гос. ун-та, 2010. – 75 с.
- Boussinesg J. Application des Potentielsa l'Etude l'E-quilibre et. du Mouvement des Solides Elasticques. Gauthier – Villars, Paris 1885.
- Расчеты на прочность в машиностроении / С.Д. Пономарев, В.Л. Бидерман [и др.]; под ред. д.т.н., проф. С.Д. Пономарева. – Т. II. – М.: Машгиз,1958. – 975 с.
- Биргер И.А., Мавлютов Р.Р. Сопротивление материалов: учеб. пособие. – М.: Наука, 1986. – 560 с.
- Рындин Н.И. Краткий курс теории упругости и пластичности. – Л.: Ленинградский университет, 1974. – 136 с.
- Штаерман И.Я. Контактная задача теории упругости. – М.; Л.: Гостехиздат, 1949. – 270 с.
- Галин Л.А. Контактные задачи теории упругости и вязкоупругости. – М.: Наука, 1980. – 304 с.
- Александров В.М., Чебаков М.И. Аналитические методы в контактных задачах теории упругости: монография. – М.: Физматлит, 2004. – 299 с.
- Жемочкин Б.М. Теория упругости. – М.: Госстройиз-дат, 1957. – 256 с.
- Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. – 13-е изд., испр. – М.: Наука; Гл. ред. физ.-мат. лит., 1986. – 544 с.
- Кошляков Н.С., Глинер Э.Б., Смирнов М.Н. Уравне-ния в частных производных математической физики. – М.: Высшая школа, 1970. – 712 с.
- Камке Э. Справочник по обыкновенным дифферен-циальным уравнениям / пер. с нем. С.В. Фомина. – М.: Наука, 1976. – 576 с.
- Смолянский М.Л. Таблицы неопределенных интегралов. – М.: Наука; Гл. ред. физ.-мат. лит., 1965. – 112 с.
- Биргер И.А., Шорр Б.Ф., Иосилевич Г.Б. Расчет на прочность деталей машин: справочник. – М.: Машинострое-ние, 1979. – 702 с.
- Самуль В.И. Основы теории упругости и пластичности. – М.: Высшая школа, 1970. – 288 с.
- Безухов Н.И. Основы теории упругости и пластичности. – М.: Высшая школа, 1968. – 512 с.
- Сопротивление материалов с основами теории упругости и пластичности: учебник / Г.С. Варданян, В.И. Андреев, Н.М. Атаров, А.А. Горшков; под. ред. Г.С. Варданяна. – М.: Изд-во АСВ, 1995. – 568 с.
- Цлаф Л.Я. Вариационное исчисление и интегральные уравнения: справ. руководство. – М.: Наука, 1970. – 192 с.
- Демидович Б.Г., Марон И.А., Шувалова Э.З. Численные методы анализа. – М.: Наука, 1967. – 368 с.
- Искрицкий Д.Е. Строительная механика элементов машин. – Л.: Судостроение, 1970. – 448 с.
- Симвулиди И.А. Расчет инженерных конструкций на упругом основании: учеб. пособие для вузов. – М.: Высшая школа, 1973. – 431 с.
