Векторное полиномиальное представление законов наведения и анимация движения спутника землеобзора

Автор: Сомова Татьяна Евгеньевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-3 т.17, 2015 года.
Бесплатный доступ
Описываются методы аналитического представления законов углового наведения спутника землеобзора при сканирующей оптико-электронной съемке и разработанные программные средства для анимации его пространственного движения с отображением маршрутов съемки на поверхности Земли.
Спутник землеобзора, законы углового наведения, анимация движения
Короткий адрес: https://sciup.org/148204328
IDR: 148204328 | УДК: 629.78
Vector polynomial representation of guidance laws and animation of a survey satellite motion
We have shortly present methods for analytical representation of the land-survey spacecraft attitude guidance laws at a scanning optoelectronic observation and elaborated software for animation of spatial motion by a land-survey spacecraft with a mapping the observation courses on the Earth surface.
Текст научной статьи Векторное полиномиальное представление законов наведения и анимация движения спутника землеобзора
В статье приводятся краткие сведения о разработанных методах оптимизации законов углового наведения спутника землеобзора для произвольного маршрута сканирующей съемки и методах анализа вектора скорости движения изображения (СДИ) в произвольной точке матриц оптико-электронных преобразователей (ОЭП). Эти методы используют теоретические основы космической геодезии [1-7] и конкретизированы для трассовых, геодезических и криволинейных маршрутов [8]. Приводится технология аналитического представления законов углового наведения спутника при сканирующей съемке, основанная на интерполяции расчетных данных векторной функцией модифицированных параметров Родри-га, а также результаты, которые демонстрируют эффективность разработанных алгоритмов.
При проектировании космических систем наблюдения, в том числе с применением сканирующей съемки поверхности Земли, применяются компьютерные средства 3D-анимации. Решение общей задачи моделирования, имитации и анимации движения космического аппарата (КА) представляется следующими этапами: расчет параметров поступательного орбитального и углового движения КА для заданной последовательности различных маршрутов съемки; визуализация поверхности Земли с учетом освещённости; расчет трассы полета, зон покрытия и следа линии визирования; отображение конструкции КА с учетом засветки ее элементов Солнцем; организация визуального отображения пространственного движения КА. Для решения этих задач используется программ-
ная система SIRIUS-S [9] и ее подсистема визуализации расчетных результатов в трёхмерной графике, созданная в среде программирования Delphi 7 с применением графической библиотеки OpenGL. Приводятся результаты практического применения разработанных алгоритмов аналитического представления законов наведения при анимации пространственного движения спутника землеобзора.
ПОСТАНОВКА ЗАДАЧИ
Рассматривается спутник землеобзора, оснащенный телескопом с матрицами ОЭП в его фокальной плоскости. При съемке заданных участков поверхности Земли совокупностью маршрутов их сканирования матрицы ОЭП работают в режиме временной задержки и накопления (ВЗН).
Используются стандартные системы координат (СК) – инерциальная (ИСК) с началом в центре Земли, гринвичская геодезическая (ГСК), горизонтная (ГорСК) с эллипсоидальными геодезическими координатами L , B и H , орбитальная (ОСК) и связанная с КА (ССК) системы координат с началом в его центре масс O . Вводятся телескопная СК (ТСК, базис S ) с началом в центре оптического проектирования S , СК поля изображения O ixi yizi (ПСК, базис F ) с началом в центре O i фокальной плоскости телескопа и визирная СК (ВСК, базис V ) с началом в центре Ov матрицы ОЭП. На поверхности Земли маршрут съемки отображается следом проекций ОЭП. Маршруту съемки соответствует закон углового наведения КА в функции времени, при котором происходит требуемое движение получаемого оптического изображения на поверхности ОЭП. При известном орбитальном движении центра масс КА рассматриваются задачи:
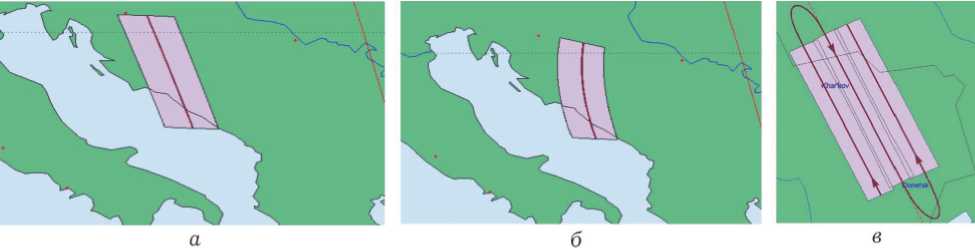
Рис. 1. Маршруты трассовой ( а ), с выравниванием СДИ ( б ) и площадной ( в ) съемки
-
1. анализа поля СДИ на матрицах ОЭП с ВЗН для трассовых, ортодромических (геодезических) и криволинейных маршрутов с выравниванием продольной СДИ;
-
2. аналитического представления законов углового наведения спутника;
-
3. применения векторного полиномиального представления законов наведения при анимации пространственного движения спутника землеобзора.
АНАЛИЗ СДИ И СИНТЕЗ ЗАКОНОВ НАВЕДЕНИЯ
Задача вычисления кватерниона Л , векторов угловой скорости ю и ускорения £ решается на
основе векторного сложения всех элементарных движений телескопа (ТСК) в ГСК с тщательным учетом как орбитального, так и углового по-
ложения спутника, геодезических координат наблюдаемых наземных объектов, вращения Земли и множества других факторов. Пусть векторы-столбцы ю ^ и v е представляют в ТСК
текущей ориентации телескопа выполняется с помощью численного интегрирования известного нелинейного кватернионного кинематического уравнения с одновременным строгом согласовании с вектором угловой скорости. Созданные методы конкретизированы для трассовых (рис. 1 а ), протяженных криволинейных маршрутов с выравниванием продольной СДИ, рис. 1 б , для площадного землеобзора с последовательностью ортодромических маршрутов, рис. 1 в , а также для получения стереоизображений выбранных наземных объектов. Отметим, что осевые линии ортодромических маршрутов соответствуют геодезическим линиям заданной высоты H над земным эллипсоидом, т.е. здесь сканирование выполняется по дуге «большого геодезического круга» между точками маршрута с заданными геодезическими координатами L , B , H и заданным временем начала выполнения маршрута сканирования.
АНАЛИТИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ
угловую скорость и скорость движения центра масс КА относительно ГСК, матрица C = || у || определяет ориентацию ТСК относительно ГСК, а скалярная функция D ( t ) представляет дальность наблюдения. Тогда для любой точки в фокальной
zl zl l l плоскости телескопа продольная Vy = Vy (у ,z )
У:
У:
и поперечная V Zi = V Zi (у1 ,zl ) компоненты вектора нормированной СДИ вычисляются по соот-
ношению [8,10]
i
y
. V
yl 1
у1 о
о
i ^ с .-^ i с -^, i S q Vel - У Юе3 + z юе2
уe e yl e q Ve2 - Юе3 - Z Юе1
q V e3 + Ю 2 + У Ю 1
. (1)
Здесь у = у / f e и Z = z / Je являются нормированными фокальными координатами указанной точки, где fe – эквивалентное фокусное расстояние телескопа, скалярная функция q = l - ( с 2 у + с 3 z ) / с 1 и компоненты вектора нормированной скорости поступательного движения y e i = v e i ( t )/ D ( t ) i = 1,2,3 . На основе (1) получаются компоненты вектора-столбца ю е для всех типов сканирующей съемки, при этом расчет
Аналитическое представление законов наведения спутника при сканирующей съемке с заданной точностью основывается на полиномиальной интерполяции векторной функции модифицированных параметров Родрига о = e tg( 0 / 4) с традиционными обозначениями орта e Эйлера и угла 6 собственного поворота. Векторная функция ст взаимно-однозначно связана с кватернионом Л = ( X 0 , Х ), X = { X ii }, l' = 1 ^ 3 явными прямыми ( Л ^ ст ) и обратными ( ст ^ Л ) соотношениями
ст = X/ (1 + X 0 );
2 (2)
Х = 2 ст /(1 + ст 2 ), X 0 = -^2 .
1 + ст
Прямые и обратные кинематические уравнения для вектора ст имеют вид
4 (3)
ю = (1 + ст 2 ) 2 [(1 - ст 2 )< ст - 2( ст X ст ) + 2 ст(<ст , ст} ].
Рассмотрим временной интервал T = [0, T ] , где выполняется сканирующая съемка, и введем обозначения для четырех точек этого интервала:
tk e T , t1 = 0, t2 = T / 3 , t3 = 2T / 3 и t4 = T . Пусть с помощью численного интегрирования кватернионного кинематического уравнения выполнен расчет маршрутного движения Л = Л(t), to = to (t), t e T, на концах интервала T вычислены значения кватерниона Л1 = Л(0), Л 4 = Л (T), вектора угловой скорости to1 = to (0) , to4 = to (T), вектора углового ускорения 81 = to (0), 84 = to (T), вектора модифицированных параметров Родрига (далее просто вектора Родрига) О1 = ст(0), ст2 = ст(12), ст3 = ст(13), ст4 = ст(T) и его производных стp = |(i -(стp)2)top+ 2стpxtop + 2стp(стp,top);(4)
-1
ст p 2
-(ст ,ст )
+ a xe +a a .co p p p p , p
+ a a +a (a p p, p p p, p /
, (5)
где значения индекса p = 1 и p = 4 соот- ветствуют граничным точкам интервала T. Интерполяция вектора Родрига ст(t) Vt e T выполняется векторным сплайном седьмого по-
рядка ст a (t) = "У astt с 8 векторами-столбцами as e R3, s = 0 ^ 7 неизвестных коэффициентов. Производные векторной функции ст a (t) пред- ставляются очевидными соотношениями ст a(t) = Е7 s аsts-1;
ст a ( t ) = E 7 s ( s — ^ a S t s - 2 .
Восемь векторов a s коэффициентов сплайна ст a ( t ) однозначно определяются на основе:
-
1) трех краевых условий ст a (0) = ст 1 ;
a (0) =ст 1; ст a (0) =ст1 на левом конце интервала T , что дает
а 0 = ст 1 , а 1 = ст 1 и а 2 = ст 1 /2 ; (7)
-
2) двух условий ст a ( t 2 ) = ст 2 ; ст a ( t 3 ) = ст 3 в двух внутренних точках t 2 и t 3 интервала T ,
которые представляется соотношениями а 3 + а 4 1 2 + а 5 1 2 2 + а 6 1 3 + а 7 1 4 = b 3;
а3 + а 413 + а5132 + а 6133 + а 7134 = b 4, где b 3 = ст 2 — (а 0 + а112 + а 212 ) /12, b4 — ст3 (а0 + а1 t3 + а2t3 )/ t3 ;
-
3) трех краевых условий ст a ( T ) = ст 4; ст a ( T ) = ст 4; ст a ( T ) = ст 4 на правом конце интервала T , что приводит к соотношениям а 3 + а 4 1 4 + а 5 1 4 2 + а 6 1 4 3 + а 7 14 = b 5;
3 а 3 + 4 а 4 1 4 + 5 а 5 1 4 2 + 6 а 6 1 4 + 7 а 7 1 4 4 = b 6; (9)
6а3 + 12а414 + 20а 5142 + 30а614 + 42а714 = b7, где b5 =ст4 — (а0 + а114 + а214)/13, b6 =<г4 — (а1 + 2а214)/142, b =ст4 — 2а2 /t4.
Для определения пяти векторов a s , s = 3 ^ 7 на основе (7) - (9) формируется соотношение AC = B , где строчные матрицы A = [ а 3 , а 4 , а 5 , а 6 , а 7 ] ; B = [ b 3 , b 4 , b 5 , b 6 , b 7 ] ; C = [ c 3, c 4, c 5, c 6, c 7] составлены из столбцов а s , b s , c 3 = t 2 ; c 4 = t 3 ; c 5 = t 4 ; c 6 = D 6 t 4 и c 7 = D 7 t 4 при t p = {1, t p , t p , t p , t 4 } p = 2,3,4 и матрицах D 6 = diag{3,4,5,6,7} ,
D 7 = dlag{6, 12, 20, 30, 42} . Вычисление сразу всех пяти искомых столбцов а s , s = 3 ^ 7 выполняется по явному матричному соотношению [ а 3 , а 4 , а 5 , а 6 , а 7] = BC 1 .
Список литературы Векторное полиномиальное представление законов наведения и анимация движения спутника землеобзора
- Морозов В.П. Курс сфероидической геодезии. М.: Недра. 1979.
- Гонин Г.Б. Космическая фотосъемка для изучения природных ресурсов. М.: Недра. 1980.
- Урмаев М.С. Орбитальные методы космической геодезии. М.: Недра, 1981.
- Бугаевский Л.М., Портнов А.М. Теория одиночных космических снимков. М.: Недра, 1984.
- Баранов В.Н., Бойко Е.Г. и др. Космическая геодезия. М.: Недра. 1986.
- Урмаев М.С. Космическая фотограмметрия. М.: Недра, 1989.
- Seeber G. Space geodesy. -Berlin -New York, Walter de Gruyter. 2003.
- Сомов Е.И., Бутырин С.А. Алгоритмы наведения и гиросилового управления ориентацией спутников землеобзора при сканирующей оптико-электронной съемке//Механика, управление и информатика. 2012. № 9 (9). С. 61-70.
- Somov Ye.I., Butyrin S.A., Somov S.Ye., Somova T.Ye. SIRIUS-S software environment for computer-aided designing of attitude control systems for small information satellites//Proceeding of 20th Saint Petersburg international conference on integrated navigation systems. 2013. P. 325-328.
- Сомов Е.И., Бутырин С.А., Сомова Т.Е., Сомов С.Е. Оптимизация режимов сканирующей оптико-электронной съемки и 3D-анимация движения маневрирующего спутника землеобзора//Техническое зрение. 2013. № 1. С. 15-22.
- Сомов Е.И., Бутырин С.А., Герасин И.А. и др. О разработке системы поддержки принятия решений оператора в ЦУП автоматических космических аппаратов//Труды 8-го Всероссийского научно-технического семинара по управлению движением и навигации летательных аппаратов. Самара: СГАУ. 1997. Том 2. С. 116-121.
- Буянов Б.Б., Лубков Н.В., Поляк Г.Л. Система поддержки принятия управленческих решений с применением имитационного моделирования//Проблемы управления. 2006. № 6. С. 43-49.
- Сомова Т.Е. Применение имитации и анимации для полетной поддержки систем управления информационных спутников//Проблемы управления. 2014. № 5. С. 70-78.
- Сомова Т.Е. Моделирование и анимация пространственного движения маневрирующего спутника землеобзора//Известия Самарского научного центра РАН. 2012. Том 14. № 6. С. 125-128.
- Somova T. Digital and pulse-width attitude control, imitation and animation of land-survey mini-satellite//Proceedings of 7th IEEE/AIAA international conference on recent advances in space technologies. 2015. P. 765 -770.
- Сомова Т.Е. Компьютерные технологии имитации и анимации для полетной поддержки системы управления движением мини-спутника землеобзора//Материалы XI Всероссийской школы-конференции молодых ученых “Управление большими системами». М.: ИПУ РАН. 2014. С. 857-873.
- Сомова Т. Е. Алгоритмы имитации и анимации для полетной идентификации и поддержки системы управления движением мини-спутника//Труды 10 международной конференции «Идентификация систем и задачи управления». М.: ИПУ РАН. 2015. С. 1078-1089.
- Сомова Т.Е. Применение 3D-анимации при обучении полетной поддержке систем управления информационных спутников//Труды XII Всероссийского совещания по проблемам управления. М.: ИПУ РАН. 2014. С. 9502-9514.
