Вентильный электропривод для погружных нефтяных насосов с импульсным повышающим преобразователем напряжения в звене постоянного тока преобразователя частоты и релейным управлением инвертором напряжения

Автор: Воеков Владимир Николаевич, Мещеряков Виктор Николаевич, Крюков Олег Викторович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.20, 2020 года.
Бесплатный доступ
Исследован вентильный электропривод на базе синхронного двигателя с возбуждением от постоянных магнитов на роторе (СДПМ). В звено постоянного тока включен дополнительный импульсный повышающий преобразователь напряжения, позволяющий поддерживать повышенное напряжение на входе автономного инвертора напряжения (АИН). Управление осуществляется с помощью двухконтурной векторной системы управления, в которой реализован алгоритм совместного релейного управления преобразователем напряжения и силовыми транзисторными ключами инвертора. Управление импульсным преобразователем напряжения осуществляется в соответствии с уравнением баланса мощности на его входе и выходе. Данная система управления позволяет получать синусоидальную форму тока на выходе инвертора. Построены математические модели электропривода в среде MATLAB Simulink, позволяющие провести исследование его свойств. Кроме того, возможно выполнить гармонический анализ тока, чтобы оценить электромагнитную совместимость разработанного электропривода с питающей сетью.
Автономный инвертор напряжения, векторная система управления, релейный регулятор, импульсный преобразователь напряжения, вентильный электропривод, гармоническийанализ
Короткий адрес: https://sciup.org/147234047
IDR: 147234047 | УДК: 621.313 | DOI: 10.14529/power200210
Rectifier drive with boost regulator connected to frequency converter dc link based on self-commutated voltage inverter with relay regulation for submersible oil pumps
This paper dwells upon a rectifier drive based on a permanent magnet synchronous motor (PMSM). An additional boost regulator connected to the DC link helps maintain an increased voltage at the self-commutated voltage inverter (SCVI). A double-loop vector control system controls the drive and uses a joint relay control algorithm to control the boost regulator and power IGBT-transistors in the SCVI. The boost regulator is controlled using the input-output power balance equation. This system ensures a sinusoidal current waveform at the inverter output. The electric drive has been modeled in Matlab Simulink to study its properties. It is also possible to analyze the current harmonics to evaluate the designed drive for electromagnetic compatibility with the power grid.
Текст научной статьи Вентильный электропривод для погружных нефтяных насосов с импульсным повышающим преобразователем напряжения в звене постоянного тока преобразователя частоты и релейным управлением инвертором напряжения
Добыча углеводородов является важной отраслью экономики России и обеспечивает изрядную часть валютных поступлений в бюджет. Глубинное бурение и откачка потребляют энергию наиболее интенсивно по сравнению с другими технологическими процессами нефтяной промышленности. На определенных глубинах, в частности от 2000 м и глубже, становится возможным только один способ доставки нефти на поверхность, а именно использование погружных насосных установок. В их состав входят электроцентробежные (ЭЦН) или электровинтовые (ЭВН) насосы. В то же время отрасль является довольно энергозатратной: так, до 5 % производимой энергии уходит на нужды нефтегазовой промышленности. В последние десятилетия на большинстве скважин осуществляется переход к регулируемому электроприводу (ЭП), за счет чего возможно сокращение энергопотребления. С момента появления погружных насосных установок асинхронные двигатели (АД) традиционно использовались в них как приводные. Они применялись из-за своей механической прочности, приспособленности к работе в сложных условиях, надежности, простоты и не самой высокой стоимо- сти. Несмотря на простоту конструкции, асинхронные двигатели имеют некоторые ограничения по применению, кроме того, из-за скольжения всегда присутствуют потери мощности в роторе.
Только за последние 25 лет в связи с удешевлением материалов для производства и развития микроэлектроники для погружных насосных установок все чаще применяются высокоэффективные синхронные двигатели с возбуждением от постоянных магнитов (СДПМ). Благодаря своим преимуществам они начинают вытеснять коллекторные машины в различных регулируемых ЭП. Их реальное успешное применение известно в автомобилестроении [1], станкостроении [2], на железнодорожном транспорте [3], в электроэнергетике [4], робототехнике [5] и космической отрасли [6].
При этом СДПМ не могут работать напрямую от сети переменного тока подобно асинхронным, поэтому они требует применения автономного инвертора тока (АИТ) или напряжения (АИН) для питания [4, 7, 8], система управления которым к тому же позволяет реализовать векторное управление током статора, а соответственно, поддерживать момент постоянным. Перспективы применения вентильного электропривода в нефтедобы- вающей промышленности достаточно подробно рассмотрены в многочисленных работах российских ученых [9–13].
Исследование управляемого импульсного повышающего преобразователя напряжения в вентильном электроприводе
В данном исследовании рассматривается векторная система управления электроприводом на базе СДПМ, получающего питание от преобразователя частоты с АИН, в звено постоянного тока которого включен управляемый транзисторный коммутатор в составе импульсного преобразователя напряжения. При его работе выполняется преобразование постоянного напряжения на его входе в постоянное напряжение на выходе. Известны силовые схемы таких импульсных преобразователей напряжения [14], которые в основном применялись для сетей с нестабильными источниками питания (контактные сети, батареи), а в зарубежной литературе они называются DC-DC-преоб-разователи. В их составе содержится определенный набор элементов: конденсатор, дроссель для накопления энергии, диод и, собственно, сам транзисторный коммутатор – IGBT-транзистор. В зависимости от последовательности включения элементов импульсный преобразователь может напряжение как повышать, так и понижать. Ранее было рассмотрено применение понижающего преобразователя с релейным управлением в составе вентильного ЭП с векторным управлением на базе СДПМ [15, 16]. В результате исследования процессов на имитационных моделях выяснено, что схема показывает вполне удовлетворительные результаты и работает в соответствии с расчетными характеристиками. Однако исследование применения импульсного повышающего преобразователя напряжения с релейным управлением в составе вентильного ЭП представляется весьма актуальной задачей. Силовая схема повышающего преобразователя напряжения показана на рис. 1.
Управление преобразователем постоянного напряжения предлагается осуществлять, используя релейный регулятор. При этом управляющий сигнал на него будет формироваться таким образом, чтобы соблюдался баланс мощностей на входе и выходе преобразователя напряжения.
I 1 ≥
U 2 I 2
U 1 ,
где U 2 – напряжение на выходе преобразователя, I 2 – ток на выходе преобразователя, U 1 – напряжение на входе преобразователя.
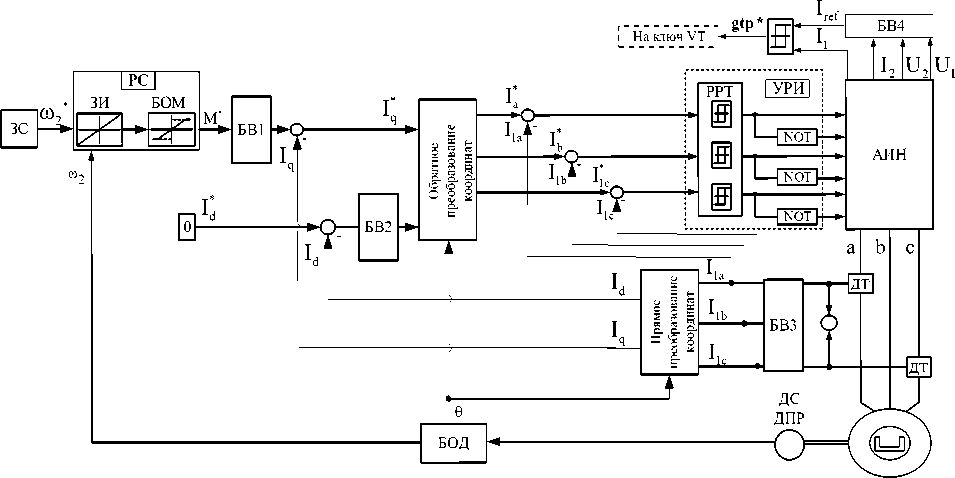
Для эффективного управления СДПМ необходимо построить векторную систему подчиненного регулирования в осях ( d , q ), в контуре тока которой формируется составляющая тока статора по q -оси, создающей электромагнитный момент при постоянном магнитном потоке ротора. Ток по d -оси поддерживается равным нулю, поскольку не создает электромагнитного момента, но может вызвать потери в двигателе, а также позволяет правильно ориентировать вектор тока статора, чтобы поддерживать угол 90° между ним и ротором [16, 17]. Функциональная схема системы векторного управления ЭП с совместным управлением транзисторными ключами АИН и импульсным преобразователем напряжения представлена на рис. 2.
Система управления содержит следующие блоки: ЗС – задатчик скорости; РС – регулятор скорости, в котором содержатся блоки задатчика интенсивности (ЗИ) и блок ограничения момента (БОМ); БОД – производит оценку скорости и угла положения ротора двигателя; УРИ – устройство раздачи импульсов на силовые ключи АИН с релейными регуляторами тока [18]; БВ1, БВ2, БВ3 – блоки вычислений, в которых производятся расчеты. Блоки прямого и обратного преобразования координат необходимы для перехода из системы ( A , B , C ) к системе ( d , q ) и обратно. В блоке вычислений БВ4 реализовано выражение для поддержания баланса мощности и формируется сигнал сравнения Ire f .
На рис. 3 представлена силовая схема вентильного электропривода с импульсным повышающим преобразователем напряжения в звене постоянного тока и векторной системой управления.
После неуправляемого выпрямителя 1 в звено постоянного тока ПЧ подключен повышающий преобразователь напряжения 2 . На входе преобразователя напряжения находятся датчик тока I 1 и датчик напряжения 4 U 1 . Перед АИН 5 обязательно содержится «чоппер» 3 , необходимый для приема энергии торможения. На выходе АИН включены датчики тока в фазах 6 , данные с которых поступают в систему векторного управления 8 вместе с данными о скорости и положении ротора с датчика скорости 7 СДПМ.
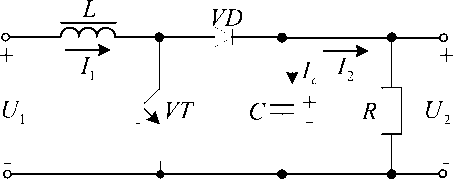
Рис. 1. Силовая схема повышающего преобразователя напряжения
CДПМ
Рис. 2. Функциональная схема векторной системы управления электроприводом
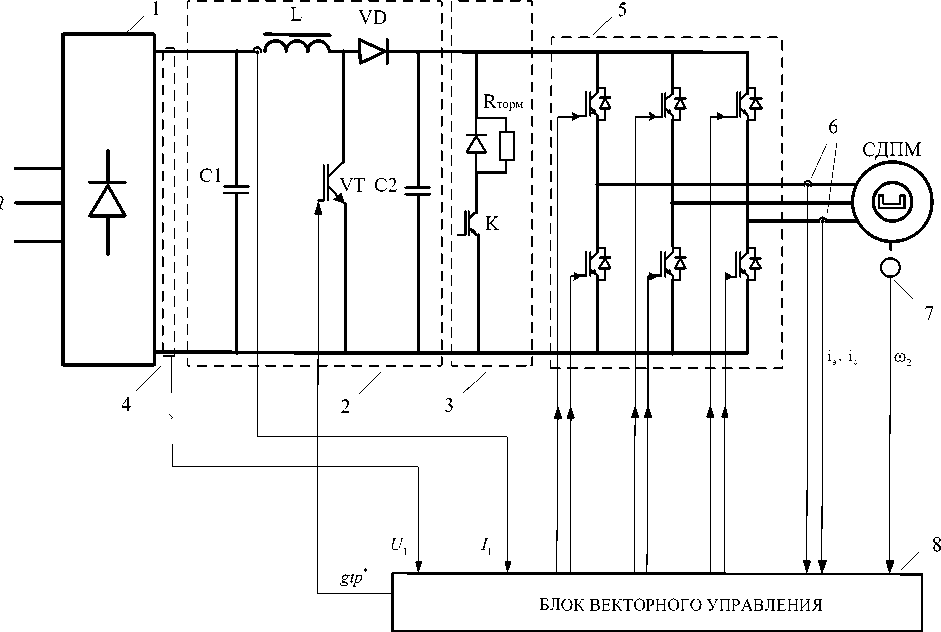
Рис. 3. Силовая схема вентильного электропривода на базе СДПМ
Для исследования свойств разработанной системы была собрана имитационная дискретная модель в среде компьютерного моделирования MATLAB Simulink. При построении модели использовались некоторые стандартные блоки из библиотеки SimPowerSystems, параметризован- ные соответствующим образом [19–21]. Кроме того, для проверки пригодности системы для работы с центробежным насосом был разработан блок, имитирующий его момент сопротивления, пропорциональный квадрату угловой скорости. В качестве объекта управления принят СДПМ
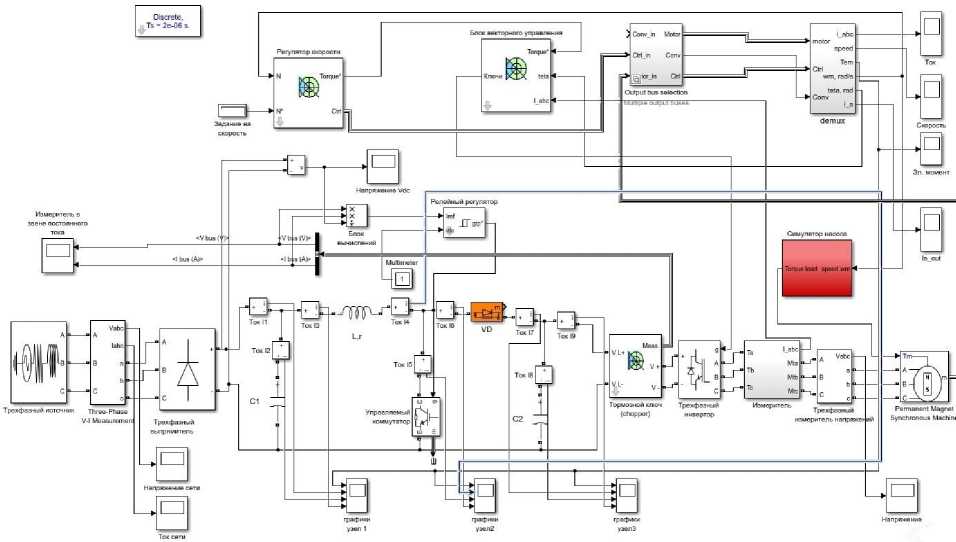
Рис. 4. Имитационная модель вентильного электропривода в MATLAB
мощностью 2,2 кВт. Имитационная модель показана на рис. 4.
Имитировалась следующая работа привода: в нулевой момент времени в блоке задания на скорость формируется задание на разгон СДПМ до 300 об/мин. Разгон осуществляется с заданным темпом под нагрузкой, создаваемой блоком симулятора центробежного насоса. Через 1,2 с после старта моделирования задание на скорость возрастает до 400 об/мин. После стабилизации скорости в момент времени 1,6 с задание на скорость меняется на нулевое и СДПМ начинает торможение. Обеспечивается точное поддержание скорости и отработка заданий на разгон и торможение за счет правильно настроенного ПИ-регулятора в контуре скорости. Общее время моделирования составляет 2,2 с, оно проводилось с фиксированным шагом Ts = 0,000002 c. В ходе моделирования с помощью цифровых измерителей были сняты графики, показывающие изме- нения тока статора (рис. 5), электромагнитного момента (рис. 6) и скорости СДПМ (рис. 7).
Из рис. 5 следует, что система управления позволяет формировать синусоидальный ток на зажимах статора за счет работы релейных регуляторов тока. На рис. 8 приведен график напряжения в звене постоянного тока
Рис. 8 характеризует стабильность поддержания напряжения, что особенно важно в случае питания двигателя от ПЧ через длинные кабельные линии. Для проверки адекватности модели с помощью датчиков тока в узлах были сняты мгновенные значения токов в момент времени t = 1 с. Для полученных графиков мгновенных значений токов выполняется первый закон Кирхгофа на входе и выходе импульсного повышающего преобразователя напряжения, что подтверждает достоверность результатов моделирования. Данные представлены в таблице.
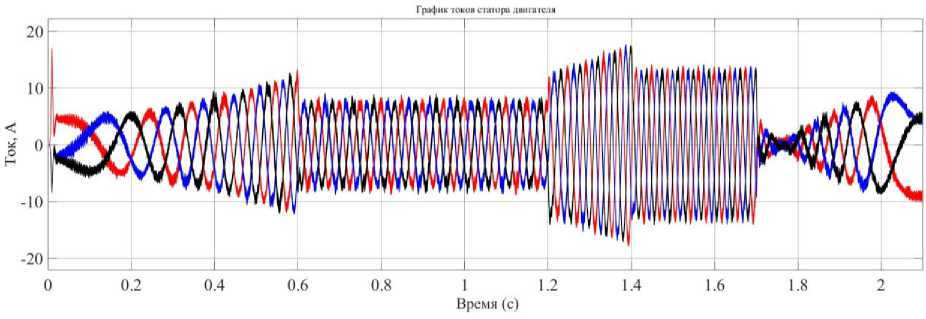
Рис. 5. График токов в фазах статора при управлении I ≥ U I /U
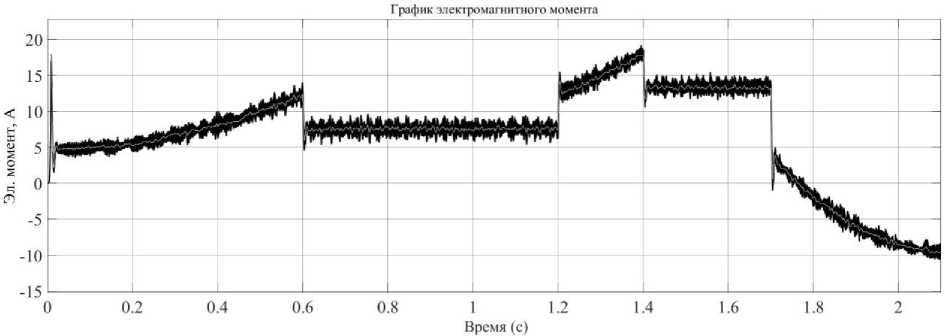
Рис. 6. График электромагнитного момента СДПМ при управлении I ≥ U I /U
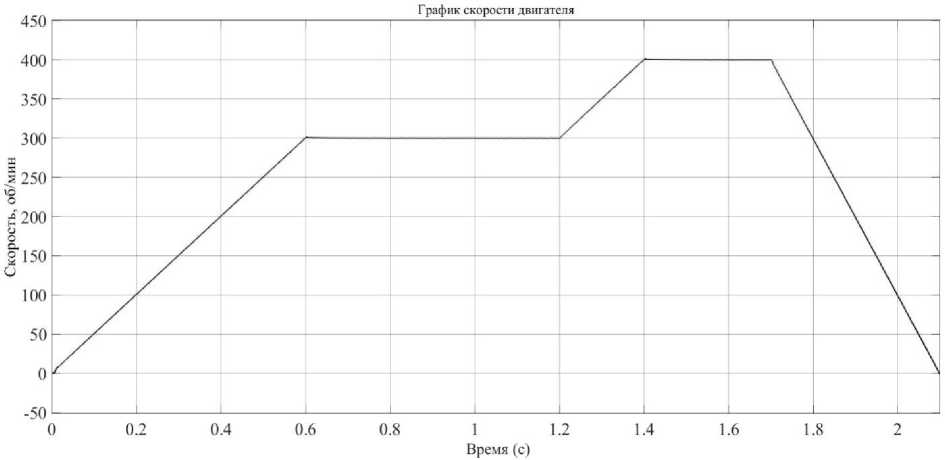
Рис. 7. График изменения скорости СДПМ при управлении I ≥ U I /U
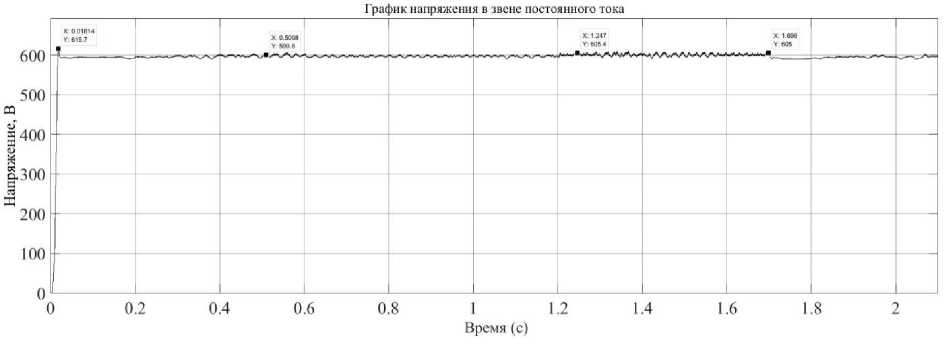
Рис. 8. График напряжения в звене постоянного тока
Мгновенные значения токов в звене постоянного тока
|
На входе преобразователя |
I 1 = 8,825 А |
I 2 = 1,231 А |
I 3 = 7,593 А |
|
На выходе преобразователя |
I 7 = 7,414 А |
I 8 = 9,580 А |
I 9 = –2,166 А |
Исследование гармонического состава токов питающей сети
Поскольку преобразователь напряжения является импульсным, а IGBT-транзистор в его составе имеет собственную частоту коммутации, то он может оказывать влияние на гармонический состав токов питающей сети. Чтобы учесть возможное влияние, необходимо провести гармонический анализ средствами программной среды MATLAB Simulink. Для сбора данных нужно выгрузить результаты измерений в рабочую область среды в виде структуры (Structure with time) путем некоторых настроек цифрового осциллографа. Поскольку в среде MATLAB Simulink производится компьютерное моделирование систем, описываемых математическими уравнениями, которые заложены в стандартных блоках, то гармонический анализ проводится с помощью определенных встроенных инструментов системы. В частности, это быстрое преобразование Фурье (FFT analysis), доступное в настройках блока Powergui. При анализе производится разложение в ряд Фурье в соответствии с формулой
F (tot) = A0 + A1 sin (tot + V1) + A2 sin (2tot + V 2) + +j + Ak sin (ktot + V k) + j = A0 + B1 sin tot + B2 sin2tot + +j+Bk sin ktot + j + C1 cos tot + C2 cos2tot +
+j+Ck cos ktot + j = A0 + a1 + a2 + j+ak + j , (2)
где A k = V B k + C k , V k = arctg C ^ .
Bk
При этом первый член ряда A0 является постоянной составляющей и называется нулевой гармоникой. Второй член ряда A1sin (tot + V1) имеет частоту, равную F (tot) (составляет 50 Гц для исследования), и называется первой или основной гармонической составляющей. Основным показателем, по которому можно оценивать качество питающей сети, являются коэффициент гармонических искажений – КГИ (THD в иностранных источниках). Также анализируется спектр гармонических составляющих (высокочастотные и низкочастотные). Сравнительный анализ спектра гармоник проводился вплоть до частоты 1000 Гц на отметке времени 0,56 с. Рассматривался один период сигнала тока фазы А в установившемся режиме для привода без импульсного преобразователя напряжения и после его включения. Результат анализа гармонического состава тока питающей сети для привода без включения импульсного преобразователя напряжения показан на рис. 9. В нижней части представлен спектр гармоник исследуемого сигнала с номерами гармонических составляющих. В верхней части показана форма сигнала тока.
При анализе для несущей частоты 50 Гц видно, что THD = 33,2 %, что довольно сильно превышает допустимые значения. Результат анализа гармонического состава тока питающей сети для привода при включении импульсного повышающего преобразователя напряжения показан на рис. 10.
При включении повышающего преобразователя напряжения можно отметить снижение THD до 18,08 %. При THD, лежащем в диапазоне 10– 50 %, питающая сеть значительно загрязнена гармониками и существует риск повышенного нагрева проводников.
Нельзя не отметить, что в случае подключения импульсного преобразователя в звене постоянного тока он благотворно влияет на гармониче-
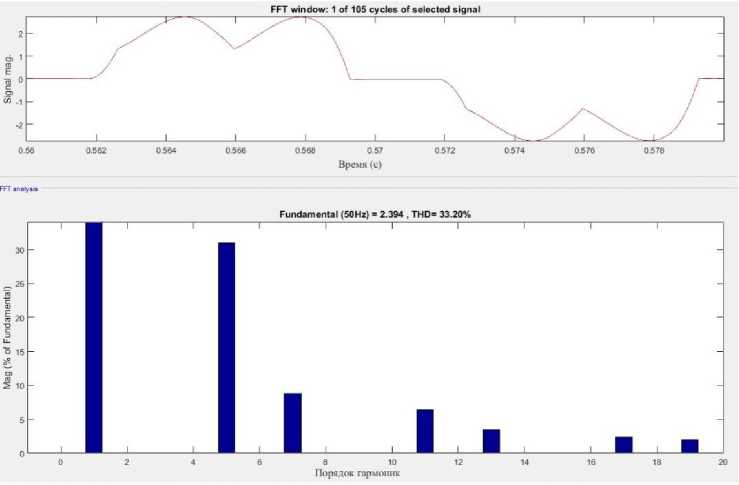
Рис. 9. Гармонический анализ тока питающей сети без включения импульсного повышающего преобразователя напряжения
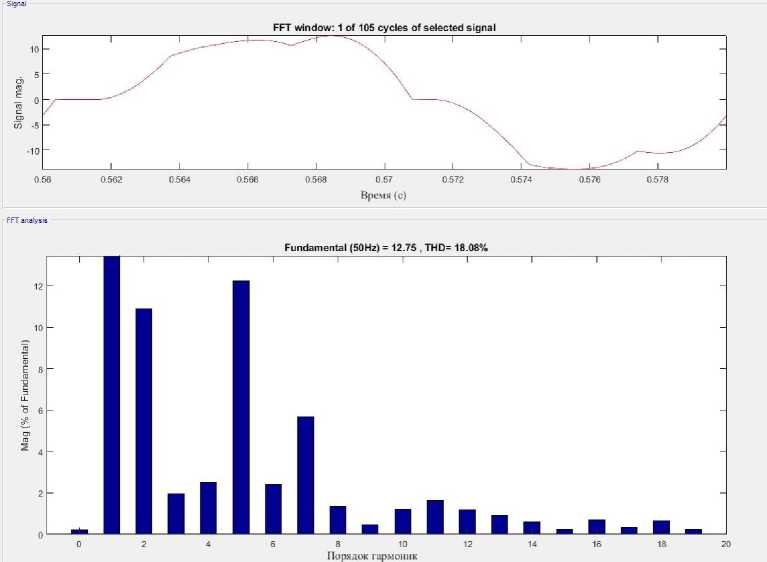
Рис. 10. Гармонический анализ тока питающей сети при включении импульсного повышающего преобразователя напряжения
ский состав питающей сети за счет наличия в его составе индуктивного и емкостного элемента, которые дают эффект фильтра. Дальнейшего улучшения можно добиться путем включения дополнительного фильтрокомпенсирующего устройства после выпрямителя.
Выводы
Разработан вентильный электропривод на базе ПЧ с совместной системой векторного управления релейными регуляторами токов АИН, а также импульсным повышающим преобразователем напряжения в звене постоянного тока.
Проведено исследование разработанной системы под нагрузкой и установлено, что при работе импульсного преобразователя напряжения в соответствии с алгоритмом поддержания баланса мощности на его входе и выходе он является ис- точником напряжения, что определяет рациональность его применения в случае питания от протяженных кабельных линий.
В результате выполненного гармонического анализа токов питающей сети подтверждено, что наблюдается улучшение гармонического состава при включении импульсного повышающего преобразователя напряжения в звено постоянного тока ПЧ. Таким образом, улучшается электромагнитная совместимость вентильного электропривода с питающей сетью.
Статья написана при поддержке гранта РФФИ 19-48-480001 «Разработка, исследование и оптимизация энергосберегающих электротехнических и элек-троприводных автоматизированных комплексов для плазменных, электрометаллошлаковых и индукционных технологий и агрегатов».
Список литературы Вентильный электропривод для погружных нефтяных насосов с импульсным повышающим преобразователем напряжения в звене постоянного тока преобразователя частоты и релейным управлением инвертором напряжения
- Жуков, В.П. Высокомоментные вентильные электродвигатели серии 5ДВМ / В.П. Жуков, В.А. Нестерин // Электротехника. - 2000. - № 6. - С. 19-21.
- Овчинников, И.Е. Вентильные электрические двигатели и привод на их основе: курс лекций / И. Е. Овчинников. - СПб.: КОРОНА-Век, 2006. - 336 с.
- Захаров, А.А. Сравнительный анализ коллекторных асинхронных и вентильных электродвигателей, применяемых в узлах железнодорожной автоматики /А.А. Захаров //Всероссийская научно-практическая конференция «Общество, наука, инновации»: сб. материалов. - 2014. - С. 2059-2061.
- Аракелян, А.К. Вентильные электрические машины и регулируемый электропривод / А.К. Аракелян, А.А. Афанасьев. -М.: Энергоатомиздат. - 1997. - Ч. 1. - 507 с.
- Новая серия отечественных вентильных электродвигателей для универсальных технологических роботов /Ю.Г. Опалев, В.А. Нестерин, Е.В. Волокитина, Н.А. Данилов // Электротехника. - 2011. - № 7. -С. 13-16. DOI: 10.3103/s1068371211070121
- Епифанов, О.К. Современный ряд высокомоментных двигателей для безредукторных следящих систем: результаты разработки и производства / О.К. Епифанов // Электротехника. - 2005. - № 2. -
- Аракелян, А.К. Вентильный электропривод с синхронным двигателем и зависимым инвертором / A.К. Аракелян, А.А. Афанасьев, М.Г Чиликин. -М.: Энергия, 1977. - 224 с.
- Лебедев, Н.И. Вентильные электрические машины / Н.И. Лебедев, В.М. Гандшу, Я.И. Явдошак. -СПб.: Наука, 1996. - 352 с.
- Меньшов, Б.Г. Электротехнические установки и комплексы в нефтегазовой промышленности / Б.Г. Меньшов, М.С. Ершов, А.Д. Яризов. -М.: Недра, 2000. - 481 с.
- Сигова, О.Б. Система оптимального управления электроприводом станка-качалки / О.Б. Сигова // Известия Самарского научного центра Российской академии наук. - 2010. - Т. 12, № 4 (3). - С. 614-617.
- Камалетдинов, Р.С. Применение приводов УЭЦН на основе вентильных электродвигателей / Р.С. Камалетдинов //Бурение и нефть. - 2007. - № 1. - С. 56-57.
- Егоров, А.В. Анализ электромеханических свойств вентильного электропривода / А.В. Егоров, С.П. Постнов, А.С. Улюмджиев // Территория Нефтегаз. - 2011. - № 5. - С. 84-90.
- Горшков, Р.Г. Аппроксимация тока нагрузки электропривода установки штангового скважинного насоса / Р.Г. Горшков, Е.А. Кротков, О.Б. Сигова // Вестник Самарского государственного технического университета. - 2010. - № 4 (27). - С. 145-151.
- Анучин, А. С. Системы управления электроприводов: учеб. для вузов / А. С. Анучин. - М.: Издательский дом МЭИ, 2015. - 373 с.
- Пат. 166655 Российская Федерация. Устройство для управления электроприводом переменного тока / В.Н. Мещеряков, В.Н. Воеков; патентообладатель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Липецкий государственный технический университет» (ЛГТУ). - № 2016113199/07; заявл. 06.04.2016; опубл. 10.12.2016, Бюл. № 34.
- Воеков, В.Н. Векторная система управления вентильным электроприводом на базе автономного инвертора напряжения с релейным регулированием входного тока инвертора и фазных токов статора. / B.Н. Воеков, В.Н. Мещеряков // Вестник ЮУрГУ. Серия «Энергетика». - 2017. - Т. 17, № 2. - С. 48-57. DOI: 10.14.529/power170207
- Калачев, Ю.Н. Векторное регулирование (заметки практика): методические указания /Ю.Н. Ка-лачев. - М.: ЭФО, 2013. - 63 с.
- Designing the universal vector control system with relay current regulator principle for general purpose industrial AC motor drive control / Victor Mesheryakov, Vladimir Voekov, Vladimir Ivashkin, Stanimir Valtchev // Proceedings - 17th International Ural Conference on AC Electric Drives (ACED 2018). - 2018. - С. 1-4.
- Герман-Галкин, С.Г. Виртуальные лаборатории полупроводниковых систем в среде Matlab-Simulink: учеб. /С.Г. Герман-Галкин. - СПб.: Изд-во «Лань», 2013. - 448 с.
- Simulation of PMSM vector control system based on Matlab/Simulink / L. Ting, Y. Tan, G. Wu, W. Shumao //Proc. IEEE Int. Conf. Measuring Technology andMechatronics Automation (ICMTMA09). - 2009. -Vol. 2. - P. 343-346. DOI: 10.1109/icmtma.2009.117
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives / R. Krishnan. - CRC Press, 2010. - 611 p. DOI: 10.1201/9781420014235-12
