Верификация математической модели виброакустического датчика

Автор: Некрасов Сергей Геннадьевич, Пономарев Андрей Сергеевич
Статья в выпуске: 23 (282), 2012 года.
Бесплатный доступ
Приведена математическая модель виброакустического датчика, разработанная на основе структурной теории распределенных систем. В вычислительной среде Matlab выполнена имитационная модель датчика. Приведены результаты численного эксперимента, которые верифицированы в вычислительной среде системы SolidWorks, и, кроме того, корректность численных расчетов подтверждена данными натурного эксперимента.
Резонансные методы, структурная теория, волновые процессы, численная модель, натурный эксперимент
Короткий адрес: https://sciup.org/147155285
IDR: 147155285 | УДК: 532.5+536.24+531.7
Verification of a vibroacustic gauge mathematical model
The article covers the vibroacustic gauge mathematical model developed on the basis of structural theory of the distributed systems. The simulation model of the sensor was created at Matlab environment. The article shows the results of numerical experiment that have been verified at Solid Works environment. Moreover, the correctness of numerical computations has also been confirmed by the results of a full-scale experiment.
Текст научной статьи Верификация математической модели виброакустического датчика
ческое исследование поведения датчика в исследуемой жидкой среде и, следовательно, необходимо совместное решение уравнений теории упругости и гидромеханики. Это требует разработки специальных математических моделей, так как решение подобных задач в известных вычислительных системах зачастую содержит непреодолимые трудности, связанные, например, с изменением области определения задачи гидромеханики до 90– 99 % за период колебаний, что приводит к потере сходимости численной схемы.
Математическая модель виброакустического датчика
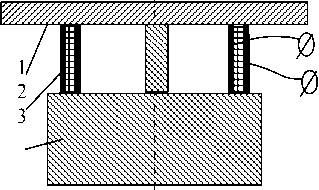
Простейшая модель датчика состоит из пластины 1, пьезоактивного элемента 2 и концевой массы 3, как показано на рис. 1.2
Разобьем упругодеформированную систему на рис. 1 на элементарные подсистемы: пластина – стержень – цилиндр – инерционная масса и запишем уравнения движения каждой из них. Уравне-
а)
б)
Рис. 1. Модель виброакустического датчика: а) клеевая, б) сборная ние малых поперечных колебаний [2] круглой изотропной пластины 1 запишем в виде:
D A r ^ A r 0 w + р h ( d 2 w I' d t 2) = Ф ( r , 0 , t ), (1)
где A r e = [( d 2I d r 2) + (1I r )( d I d r ) + (1I r 2)( d 2I d0 2)] -оператор Лапласа; Ф ( r , 0 , t ) - функция возмущений; D = Eh 3I[12(1- ct 2)] - цилиндрическая жесткость; р - плотность материала; E - модуль Юнга; ст - коэффициент Пуассона; h - толщина; r - радиус; 0 - окружная координата.
В качестве краевых условий используются условия свободного края, которые определяют равенство нулю изгибающих моментов и перерезывающих сил на граничном контуре пластины:
Mr = - D {( d 2 w I d r 2) + ст [(11 r )( d w I d r ) +
+ (1I r 2)( d 2 w I de 2)]} = 0, при r = R 1 , (2)
Qr = - D {( d i d r )( A r 0 w ) - (1I r ) ( d I d0 ) X
X [(1- CT )( d i d r ) (1I r )( d w I d0 )]} = 0, при r = R 1 . (3) Начальные условия имеют вид:
w ( r , 0 , t = 0) = w i ( r , 0 ); d w ( r , 0 , t = 0)I d t = w 2( r , 0 ).
Функция Ф ( r , 0 , t ) включает возмущения, наложенные на пластину со стороны внешней среды, в том числе через краевые и начальные условия. В соответствии с работой [3] имеем:
Ф ( r , 0 , t ) = P ( r , 0 , t ) - G 1 S ( r - r 0 ) - F 1 8' ( r ) +
+ p h [ w 1 ( r , 0 ) 8 ( t ) + w 2( r , 0 ) 8' ( t )]. (4)
В этом выражении P ( r , 0 , t ) - распределенная по площади нагрузка со стороны жидкости, заключенной или в тонком прилегающем слое, или в неограниченном пространстве; G 1 - интенсивность реакции связи со стороны цилиндрического пьезоэлемента, равномерно распределенная по окружности радиуса r 0 ; F 1 - сосредоточенная реакция связи со стороны пьезоактивного стержня; R 1 -внешний радиус пластины; 8 , 8 r ', 8 t ' - дельтафункция и ее производная по координате r и времени t .
Уравнение продольных колебаний пьезоэлемента 2 в виде цилиндра или стержня приближен- но описывается волновым уравнением (модель тонкого стержня):
d 2 u i I d t 2 = c i 2 k f 2 d 2 u i I d x 2, (5)
где i = 1 относится к стержню, i = 2 - к цилиндру; C j 2= E Ui I p i - скорость распространения звука в пьезоактивном материале; р i - плотность, k f - коэффициент поправки на конечное значение толщины столбика и цилиндра.
Условия на краях пьезоэлемента 2:
E U 1 A r 0 d u 1 I d x = G 1 + G 0 ( x = 0),
EU1A rndu 1Idx = - G 2-G 0 (x = l),(6)
E U 2 S d u 2I d x = F 1 + F 0 ( x = 0),
EU2Sdu2Idx = -F2-F0 (x = l).(7)
Уравнение движения концевой массы 3 имеет вид:
d2 vIdt2 = 2л r0 G 2 + F2.(8)
Уравнения пьезоэффекта запишем в форме с константой Г [4]:
d u 2 I d x = ( G 0 + Г 12 P )I S P ,
P = e( U + Г 12d u 2Idx),(9)
где sP = sU + е Г12 - упругость пьзоэлемента 2 при постоянной поляризации P ; sU - упругость пьзо-элемента при постоянном электрическом поле ( U - напряженность поля); EU i - модуль упругости первого рода при постоянном электрическом поле; F 0 и G 0 - эквивалентные пьезоактивные сила и интенсивность силы, приложенные к концам стержня и цилиндра и определяемые через уравнения пьезоэффекта (9).
Условия сопряжения по перемещениям:
u 1 (0) = w (0), u 2 (0) = w ( r 0 ), u 1 (l) = u 2 (l) = v .
Часто в измерительной практике приходится создавать излучатели или приемники со сферической излучающей (принимающей) поверхностью, что обеспечивает высокую пространственную избирательность измерительного сигнала и получение более детальной информации. Математическая модель такого датчика аналогична вышеизложенной модели (1)-(9), однако уравнение поперечных колебаний пластины надо заменить на уравнения колебаний пологой сферической оболочки, которые в обозначениях работы [2] имеют следующий вид:
D A r 0A r 0 w + R -1 A , еф + p h ( d 2 w I d t 2) = Ф ( r , 0 , t ), (10) A 11 A r eA ^ф - R 1 A ^ 0 w = 0, (11)
где R - радиус сферы и ф - угловая координата сферической оболочки. Очевидно, что при радиусе R ^ ^ уравнения (10) и (11) переходят в уравнение (1). Метод решения основан на использовании функций Грина пластины и сферической оболочки, а собственно модель датчика формируется на основе структурной теории распределенных систем [3], аналогично работе [1].
Используемые модели содержат ряд ограничений, связанных с приближениями теории пластин и оболочек, неточностью описания колебаний стержня и пьезоцилиндра 2 волновым уравнением, отсутствием учета влияния смежных форм колебаний другого типа, которые приводят к появлению комбинационных частот, и т. д. Возникает также вопрос о методической погрешности вычисления собственных частот и форм колебаний, который можно снять верификацией разработанной модели на основе численного и натурного эксперимента. В качестве численного верификатора выбрана вычислительная среда SolidWorks со встроенным конечно-элементным приложением CosmosWorks, имеющая сертификат качества американского и европейского образца. Предлагаемая модель датчика реализована c использованием вычислительных возможностей пакета Matlab.
На рис. 2 представлена амплитудночастотная характеристика датчика, полученная на основе расчетных амплитуд колебаний на краю пластины по разработанной нами модели. Зависимости получены при следующих параметрах датчика: радиус пластины – 30 мм; толщина – 3 мм; модуль упругости пластины и стержня – 2,1·1011 Н/м2, модуль упругости пьезокерамического материала цилиндра – 2,21·1011 Н/м2, длина стержня – 30 мм, длина пьезоэлемента – 15 мм, масса концевого элемента – 300 г, плот- ность материала пластины и стержня – 7,8·103кг/м3, плотность пьезокерамики – 2,3·103кг/м3, коэффициент Пуассона материалов – 0,29. На рис. 2 можно увидеть, что значение второй резонансной частоты составляет f02 = 7460 Гц. Сравнивая рис. 2 и 3, видим, что амплитуда колебаний датчика в окрестности третьей резонансной частоты примерно в 2,5 раза меньше, чем в окрестности второй. Этот же факт отражен и на рис. 5, где диаметр диаграммы кругового кинетического импеданса [4] для 3 резонансной частоты существенно больше диаметра в окрестности второй частоты. Фазочастотная характеристика представлена на рис. 4 и необходима для построения диаграмм кинетического импеданса. Диаграмма кругового кинетического импеданса в околорезонансной области показана на рис. 5, вторая и третья формы колебаний представлены на рис. 6.
Частотные характеристики и околорезонанс-ные диаграммы кинетического импеданса содержат в себе необходимые идентификационные признаки, на основе которых решается задача определения состава жидких сред. Например, анализируя
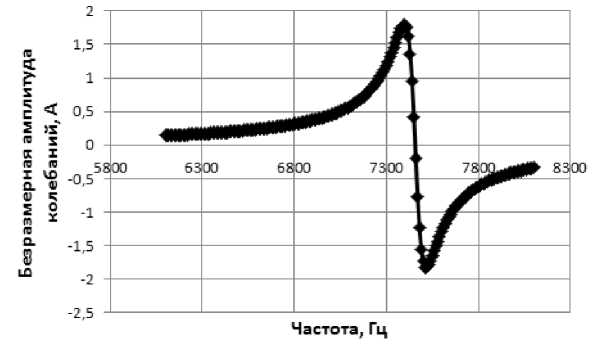
Рис. 2. Частотная характеристика амплитуды колебаний на краю пластины в окрестности второй резонансной частоты ( f 02 = 7460 Гц)
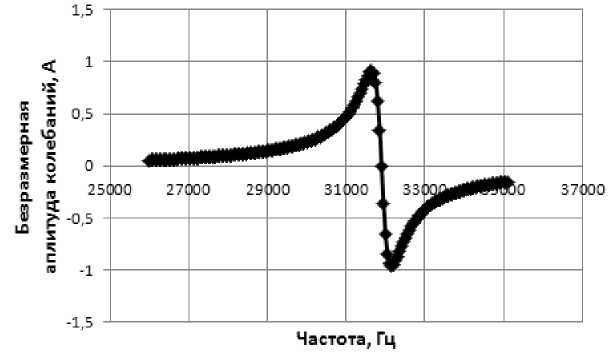
Рис. 3. Частотная характеристика амплитуды колебаний на краю пластины в окрестности третьей резонансной частоты ( f 03 = 31900 Гц)
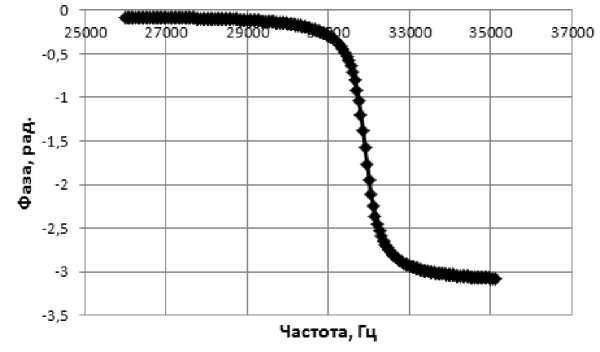
Рис. 4. Фазочастотная характеристика в окрестности третьей резонансной частоты колебаний f 03
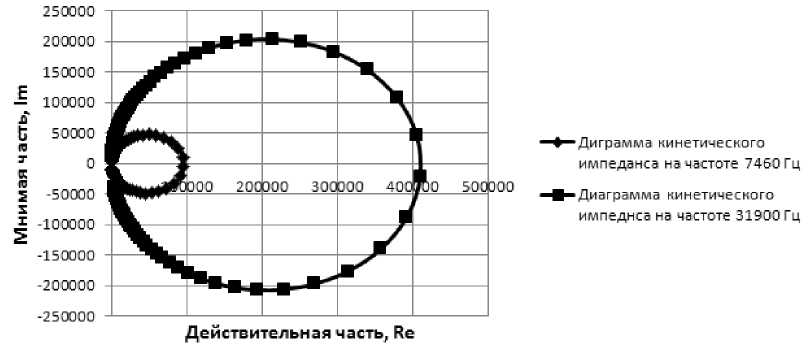
Рис. 5. Диаграммы кругового кинетического импеданса в окрестности частот f 02 = 7,46 кГц и f 03 = 31,9 кГц

Рис. 6. Вторая и третья формы колебаний
диаграмму кинетического импеданса, можно выделить следующие параметры: резонансная частота; квадрантные частоты; диаметр круговой диаграммы кинетического импеданса. Здесь резонансная частота связана с параметрами пластины и жидкости по формуле f0 " 21Г ' (12)
где r - радиус пластины; E - модуль Юнга; р - плотность пластины, которые функционально связаны с параметрами элементов датчика и присоединенной массы жидкой среды, и установление этой связи является одной из решаемых задач.
а)
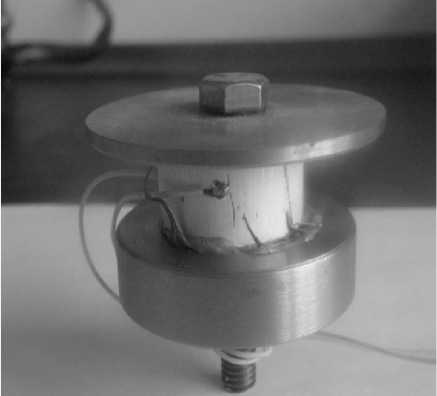
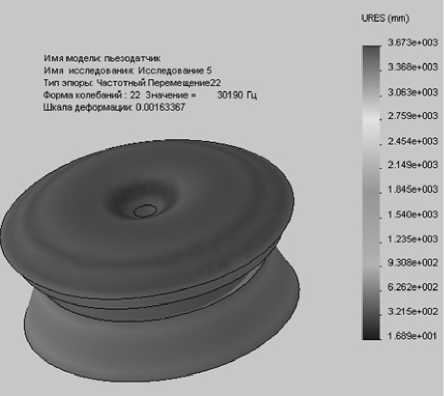
Рис. 7. Натурная (a) и численная (б) модель виброакустичсекого датчика, полученная в среде Cosmos Works
б)
Альтернативные статистические методы не дают требуемой точности идентификации жидких сред и, особенно, при сложном, динамически изменяемом составе.
Сравнение результатов расчета на основе сопоставления величин собственных частот и форм колебаний, полученных с помощью разработанной и конечно-элементной модели CosmosWorks, дает погрешность вычислений на уровне 5,3 %. Данная погрешность является следствием описанных выше допущений теоретической модели. Был изготовлен также натурный макет датчика (рис. 7, а). Исследование этого макета было проведено с использованием фигур Хладни, которые на частоте резонанса позволяют увидеть реальную форму колебаний с помощью сыпучей среды, нанесенной на поверхность пластины. Форма колебаний соответствует теоретической, при этом третья резонансная частота составила 30,366 кГц, что также достаточно близко лежит к расчетной частоте и совпадает с частотой численного верификатора 30,190 кГц с относительной погрешностью 0,6 %.
Заключение
Разработана распределенная модель виброа-кустического датчика, которая показала хорошее совпадение с данными натурного и численного эксперимента. Дальнейшая работа должна привести к появлению методики и программного обеспечения для идентификации жидких сред на основе околорезонансных измерений, а также устройств для измерения парциальных значений плотности, вязкости и расхода.
Список литературы Верификация математической модели виброакустического датчика
- Некрасов, С.Г. Модель резонансного виброакустического датчика/С.Г. Некрасов//Изв. Челяб. науч. центра. -2007. -№ 3(37). -С. 45-52.
- Амбарцумян, С.А. Общая теория анизотропных оболочек/С.А. Амбарцумян. -М.: Изд-во «Наука», 1974. -103 с.
- Бутковский, А.Г. Структурная теория распределенных систем/А.Г. Бутковский. -М.: Изд-во «Наука», 1977. -224 с.
- Ультразвуковые преобразователи/под ред. Е. Кикучи. -М.: Мир, 1972. -425 с.
