Видеомониторинг - один из способов обнаружения лесных пожаров

Автор: Шепелва И.С.
Журнал: Лесохозяйственная информация @forestry-information
Рубрика: Охрана и защита лесов
Статья в выпуске: 4, 2015 года.
Бесплатный доступ
Описан существующий подход к обнаружению лесных пожаров. Представлен алгоритм расчета оптимального размещения видеокамер на вышках сотовой связи для системы раннего обнаружения пожаров. Приведены результаты апробации алгоритма в условно выбранном регионе Российской Федерации
Лесные пожары, видеомониторинг, раннее обнаружение лесных пожаров
Короткий адрес: https://sciup.org/14336602
IDR: 14336602 | УДК: 650.95
Early fire detection methods: video monitoring
Wildfires are not only the global natural disaster but one of the most important environmental problems in Russia. A forest burnt area is often several times more than the cuttings total area and the consequences affect the ecosystem in hundreds of years after the forest fire. Moreover, the wildfire fighting problem is the sharpest social-economic problem. As a result of wildfires, huge volumes of carbon dioxide get emitted to the atmosphere every year, valuable plant and species are gone, production goods are destroyed as well as buildings and installations, cultural-historical monuments could be damaged, transport systems functioning rhythm is broken, and above all, people can be seriously injured or even die. Statistics of wildfires all over the world shows that their number and area are increasing annually. According to this, one of the main tasks of forest fire management is operative management of forest fire fighting. Video monitoring is one of the methods of early fires detection, and the using of mathematical algorithms for this method is being studying in the article. The approximate algorithm of optimal positioning of video cameras on cell towers is developed for effective work of video monitoring system of early fire detection. The implementation of this algorithm in one of the Russian administrative districts has revealed the importance of multi-criteria optimization task solving
Текст научной статьи Видеомониторинг - один из способов обнаружения лесных пожаров
В организации управления лесопожарными службами можно выделить 3 стадии [1]:
-
✓ стратегическое управление (до наступления пожароопасного сезона);
-
✓ оперативное управление (в течение лесопожарного сезона, в зависимости от пожарной обстановки);
-
✓ постсезонное управление (по окончании пожароопасного сезона).
Стадия оперативного управления борьбой с лесными пожарами включает в себя систему раннего обнаружения пожаров, систему оперативной связи, систему управления в реальном времени силами и средствами пожаротушения.
Под процессом обнаружения пожаров понимается слежение за охраняемой территорией с пожарно-наблюдательных пунктов (вышки, мачты, павильоны), а также патрулирование охраняемой территории с воздуха, на суше и воде с целью установления мест возникновения лесных пожаров.
В настоящее время обнаружение лесных пожаров осуществляется следующими способами [2]:
-
✓ наземный (патрулирование наземное и с водных акваторий, визуальный мониторинг, видеомониторинг);
-
✓ авиационный (авиапатрулирование);
-
✓ космический (спутниковый мониторинг).
Эффективность обнаружения и тушения лесных пожаров оценивается по результатам работы подсистемы обнаружения и тушения, а также затрат, связанных с их функционированием, и сравнением этих показателей в разных вариантах их функционирования.
Обнаружение лесных пожаров на ранних стадиях их возникновения – одна из наиболее важных задач оперативного управления лесопожарными службами. Своевременное обнаружение лесного пожара (в кратчайший срок после возникновения) позволяет значительно снизить затраты на его тушение и возможный последующий ущерб [3–5].
Современный подход к раннему обнаружению лесных пожаров предполагает использова- ние телеустановок, а также разработок математических алгоритмов, как элементов системы поддержки принятия управленческих решений при охране лесов от пожаров. Он включает систему видеомониторинга раннего обнаружения пожаров. Для наблюдения с пожарно-наблюдательных пунктов могут также использоваться специальные телекамеры, позволяющие заметить дым (первый признак возникновения лесного пожара) на расстоянии до 20 км. Это позволяет определить вид очага горения или лесного пожара, установить его характеристики.
Данные с камер видеонаблюдения, установленных на специальных вышках, в реальном времени поступают на экраны в диспетчерский центр, координаты и направление пожара определяются автоматически. Его местоположение выводится на электронную карту, а при наличии векторной детальной дорожной сети, автоматически рассчитывается оптимальный маршрут к месту возможного пожара.
Использование математических алгоритмов обусловлено, в частности, необходимостью разработки оптимального размещения видеокамер на вышках (или датчиков, в случае их использования) для системы раннего обнаружения пожаров.
Подобный алгоритм может быть применён в любом регионе Российской Федерации для определения оптимального количества вышек, необходимых для обеспечения работы системы видеомониторинга лесных пожаров. В данной системе предполагается размещать телекамеры на существующих вышках оператора сотовой связи, удовлетворяющих определённым параметрам. При этом должно быть обеспечено максимально эффективное покрытие территории земель лесного фонда региона с учётом заданных допустимых объёмов бюджетных ассигнований, выделяемых на обнаружение лесных пожаров с пожарных наблюдательных пунктов. Под максимально эффективным покрытием (далее – эффективность покрытия) подразумевается максимальное значение суммарной площади, за которой ведётся наблюдение с диспетчерского пункта с помощью видеокамер.
Нами проанализированы статистические сведения по пожарам на землях лесного фонда условно выбранного региона за последние 5 лет. В зависимости от степени горимости лесов лесничества региона подразделены на 3 группы – наиболее горимые, среднегоримые и слабогори-мые. Для повышения эффективности раннего обнаружения пожаров с учётом снижения затрат на установку видеокамер и создания необходимой эффективности покрытия, использован алгоритм отбора вышек, обеспечивающих двойное покрытие территории наиболее горимых лесничеств, полуторное перекрытие площади средне-горимых лесничеств и однократное покрытие площади слабогоримых лесничеств. Расчет осуществлялся с учетом реально размещенных вышек оператора сотовой связи высотой 70–72 м.
Алгоритм включает выполнение следующих действий:
-
1. Составление списка геометрических областей, на которые охраняемая территория разбивается окружностями, радиусы которых равны радиусам обзора видеокамер с центрами в точках расположения вышек с этими видеокамера-
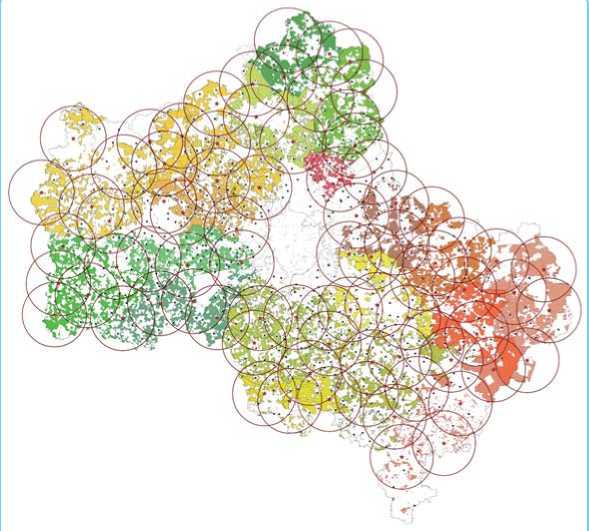
Схема размещения и зона покрытия точек установки камер наблюдения на карте ( зелёным цветом отмечены малогори-мые области, жёлтым – зоны средней горимости, красным – сильногоримые области )
-
2. В каждой области выбрана одна точка. Задача покрытия всех областей свелась к покрытию всех таких точек.
-
3. Набор выбранных вышек строился автоматически, с использованием языков программирования. На каждом последующем шаге в набор вышек добавляли новые вышки, которым соответствовали максимальные значения определенной целевой функции.
-
3.1. В процессе решения выбирали несколько вариантов целевой функции, после чего решения, построенные с их помощью, сравнивали и среди них выбирали оптимальное.
-
3.2. Целевая функция учитывала с разными весовыми коэффициентами такие параметры, как:
-
ми. Каждая из таких областей, в зависимости от решаемых задач, покрыта полностью или неполностью.
-
✓ количество новых точек, которые покрывает вышка;
-
✓ количество точек, которые уже были покрыты один раз и для которых данная вышка обеспечивает повторное перекрытие;
-
✓ удаленность от выбранных вышек;
-
✓ площадь перекрытия с областями обзора выбранных вышек.
-
3.3. После добавления в набор очередной вышки значения целевой функции для остальных вышек пересчитывали.
-
3.4. Процесс сортировки вариантов останавливали, когда было достигнуто почти полное (погрешность определяется параметрами задачи) покрытие области.
-
4. После того как с учетом данной целевой функции построен набор вышек, результат фиксировали, меняли параметры целевой функции, и алгоритм запускали снова. Параметры изменяли с корректировкой коэффициентов, которые учитывали расстояние до других вышек и количество новых одинарных либо двойных покрытий.
-
5. Результат – наилучший набор вышек среди всех рассчитанных вариантов целевой функции.
В окончательном варианте установлено оптимальное количество вышек в условно выбран- ном регионе (79 шт.), на которых следует разместить видеокамеры. Схема размещения и зона покрытия точек установки камер наблюдения на карте представлена на рисунке.
Таким образом, предложенный алгоритм позволил установить требуемое количество вышек с учетом эффективности покрытия и их местоположение из уже существующих с учётом выделенных ассигнований на обнаружение лесных пожаров с пожарно-наблюдательных пунктов. Применение алгоритма показало, что необходимо рассмотреть многокритериальную задачу оптимального выбора вышек, где в качестве целевых функций могут выступать функции, отражающие горимость охраняемой территории, средневзвешенный класс природной пожарной опасности, а также затраты, связанные с организацией системы видеомониторинга.
Список литературы Видеомониторинг - один из способов обнаружения лесных пожаров
- Региональная система поддержки принятия управленческих решений при охране лесов от пожаров/Ю. З. Шур, О. А. Доммес, И. С. Шепелёва, Д. В. Элькина//Труды Санкт-Петербургского НИИ лесного хозяйства. -Вып.1 (24). -Ч. 1. -СПб., 2011. -С. 176-183.
- Ханин, А. Принципы оптического метода автоматического детектирования лесных пожаров/А. Ханин, Р. Чеботарев//Алгоритм безопасности. -2011. -№ 1.
- Коровин, Г. Н. О системном подходе к планированию охраны лесов от пожаров/Г. Н. Коровин, Л. М. Абрамов //Лесные пожары и борьба с ними: сб. науч. тр. -Л.: ЛенНИИЛХ, 1978. -С.104 -120.
- Алгоритмы и программы расчета оперативных систем обнаружения и тушения лесных пожаров на ЭВМ: методич. рекоменд. -Л.: ЛенНИИЛХ, 1974. -88 с.
- Щедрин, А. Г. К вопросу расчёта показателя своевременности обнаружения лесных пожаров при использовании пожарно-наблюдательных пунктов/А. Г. Щедрин, Е. Н. Горовая//Леса России в ХХI веке: матер. 2-й междунар. научно-практич. интернет-конф. -СПб.: СПбГЛТА, 2009. -С. 59 -62.
