Влияние кинематических параметров движения локтя на электромиографический сигнал двуглавой мышцы плеча

Автор: Бонилья Феликс, Лукьянов Евгений Анатольевич, Литвин Анатолий Витальевич, Деплов Дмитрий Алексеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 4 (79) т.14, 2014 года.
Бесплатный доступ
Рассмотрено влияние кинематических параметров движения локтя (угловое перемещение, скорость и ускорение) на поверхностный электромиографический сигнал двуглавой мышцы плеча при выполнении движений локтя с различной нагрузкой. Установлены зависимости частотных и амплитудных параметров ЭМГ-сигналов от параметров движения локтя при подъеме и опускании груза. Показана структура экспериментального стенда. Представлена методика записи ЭМГ-сигналов с двуглавой мышцы плеча, а также методика обработки сигналов. Для формирования количественных значений показателей анализа сигналов использовались методы спектрального и статистического анализа. Статистический анализ во временной области включал в себя определение следующих параметров: дисперсия амплитудных значений ЭМГ, среднее и среднеквадратическое значение абсолютных величин амплитуд ЭМГ, частота пересечения нулевой линии ЭМГ-сигналом. Эти параметры, а также параметр, характеризующий форму сигнала, определялись на основе массива измеренных значений сигнала, формируемого в течение 0,3 секунды текущего интервала времени («скользящий» интервал). Оценена величина развиваемого мышечного усилия, найдены коэффициенты косинусного преобразования Фурье. Построены гистограммы распределений биопотенциалов ЭМГ. В частотной области выполнялся спектральный анализ ЭМГ-сигналов методом быстрого преобразования Фурье. Определялись общая мощность спектра, средняя частота, медиана, частота спектральной составляющей, имеющей наибольшую амплитуду. Регистрация и анализ биопотенциалов ЭМГ выполнялись средствами Matlab. Выявлены информационные признаки, которые могут быть использованы для синтеза интеллектуальной системы управления на основе нейронных сетей.
Пассивный экзоскелет, параметры движения локтя, электромиографический сигнал, статистический анализ, спектральный анализ сигналов
Короткий адрес: https://sciup.org/14250099
IDR: 14250099 | УДК: 611.737:004 | DOI: 10.12737/6885
Effect of kinematic parameters of elbow motion on biceps electromyographic signal
The effect of the elbow motion kinematic parameters (angular displacement, velocity, and acceleration) on the surface electromyographic (EMG) signal of the biceps of the arm under the elbow motion execution with different load is analyzed. The dependences of the frequency and amplitude parameters of EMG signals on the elbow motion parameters under load lifting and lowering are established. The test bench structure is shown. The technique of recording EMG signals from the biceps, as well as of the signal processing methods are presented. Methods of statistical and spectral analysis are used for the quantification of the EMG signal values. In the time domain, the statistical analysis includes the determination of the following parameters: EMG amplitude values dispersion, average and RMS values, zero crossing value, waveform length. These parameters are determined on the measured values array basis of the signal generated within 0.3 sec. of the current time (‘sliding’ interval). The developed muscle force value is estimated; the cepstral coefficients are found. EMG biopotential distribution histograms are constructed. In the frequency domain, the EMG signals spectral analysis is carried out by Fast Fourier Transform. The spectrum total power, the average frequency, the median, and a spectral component with the dominant frequency are determined. The EMG biopotential registration and analysis are performed by means of Matlab. Information features which can be used for the intelligent control system synthesis based on neural networks are identified.
Текст научной статьи Влияние кинематических параметров движения локтя на электромиографический сигнал двуглавой мышцы плеча
Введение. Скелетные мышцы являются совокупностью двигательных единиц (ДЕ). При стимуляции нейронным сигналом каждая ДЕ сокращается и генерирует электромиографический (ЭМГ) сигнал, который представляет собой сумму потенциалов действия всех вовлеченных в процесс клеток [1]. Поверхностная ЭМГ часто используется для оценки относительного уровня мышечной активности во время движений [2]. Известно, что слабые волевые усилия заставляют ДЕ возбуждаться с частотой примерно 5-15 Гц, а при возрастании усилий частота увеличивается до 25-50 Гц с формированием интерференционного типа ЭМГ-сигнала. По мере утомления мышцы наблюдается снижение доли высокочастотных составляющих и увеличение амплитуды ЭМГ [3]. Сигнал ЭМГ, записанный с использованием поверхностных электродов, является сложным, включает в себя интерферирующие составляющие, поэтому его анализ затруднен [4].
ЭМГ-сигнал характеризует уровень активности мышцы и широко используется в медицине для диагностики нейромышечных заболеваний. Достаточно активно ведутся работы по использованию ЭМГ-сигналов для био- или нейроуправления протезами [5-7]. Очевидно, для создания эффективных протезов с биоэлектрическим управлением необходим качественный и стабильный электромиографический сигнал. Также важно использовать эффективные усилители биопотенциалов, определить точки установки электродов [7]. В статье приведены методика и итоги экспериментальных исследований электромиографических сигналов, результаты их анализа, позволяющие формировать набор признаков для распознавания выполняемого движения и его параметров.
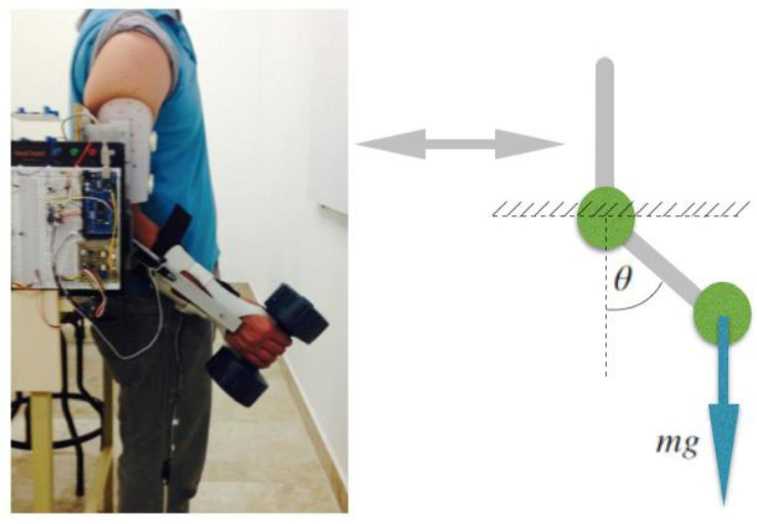
Методика проведения исследований. Исследования проводились при помощи специальной электромеханической системы типа экзоскелет, которая ограничивала подвижность локтевого и плечевого суставов (рис. 1). В исследованиях принимали участие пять испытуемых в возрасте от 24 до 35 лет,
*
примерно равные по массе тела и физическому развитию, не имеющие заболеваний и повреждений верхних конечностей.
Канал записи электромиографического сигнала включал накожные электроды, усилитель, аналога-цифровой преобразователь (АЦП), программные фильтры: режекторный 4-го порядка (для удаления сетевой помехи) и полосовой с частотами среза 10 и 250 Гц.
Сигнал ЭМГ записывался системой сбора данных NI USB 6212 с помощью электродов Ад / АдС! (диаметр 5 мм). Частота оцифровки — 1000 Гц. Место установки электродов предварительно обрабатывалось в соответствии с рекомендациями [4].
Электроды крепились на поверхность бицепса по линии мышечных волокон на расстоянии 2 см друг от друга. Они фиксировались с помощью манжеты, обеспечивающей их надежный контакт с кожей предплечья. Это исключало перемещение электродов в процессе эксперимента (рис. 1).
a ) 6 )
Рис. 1. Электромеханическая система для записи ЭМГ-сигнала бицепса: общий вид экзоскелета (а);
кинематическая схема (б); 6 — угол сгибания локтя
Цель исследования — установление зависимостей характеристик ЭМГ-сигнала бицепса от параметров движения локтя. Кроме того, выявлялись характерные параметры, позволяющие определять фазы движения локтя для управления внешними устройствами.
Значения углового перемещения плеча (рис. 1) измерялись с помощью гироскопа (датчик L 3 G 4200 D). Данные (как и ЭМГ-сигнал) записывались в файл на компьютере. Для этого использовалась система сбора данных NI USB-6212. Испытуемый изменял угловое положение плеча в диапазоне 0 90-0 градусов при нагрузках 5, 7, 15 кг.
Анализ данных. Полученные экспериментальные данные исследовались методами статистического, спектрального и вейвлет-анализа. Использовалось также авторегрессионное моделирование [1]. Для исследования электромиографических сигналов во временной области применены скользящие окна, размер которых определялся условиями эксперимента. После записи сигнала определялись его дис- персия, среднее абсолютных значений (mAV), среднеквадратическое значение {RMS), частота пересе- ).
Развиваемое мышечное усилие оценивалось с учетом параметра togDetect, а также коэффици-8]. - его среднего значения. Скользящее среднеквадратическое значение — индикатор средней мощности
- щихся в окне данных можно было принимать решения о выполняемом движении. Экспериментально определенная величина окна составила 0,2-0,3 секунды. - в пределах окна. Этот показатель является простой мерой, связанной с частотой и сложностью сигнала. Для устранения влияния низкоамплитудных шумов при обработке сигнала вводился порог, равный 10 15
(
«сложности» и определялся на основе отсчетов в текущем окне [8] следующим образом:
/V
WaveLen = ^|д^|, где \xk xk -xk 1. (1)
k= 1
Развиваемое мышечное усилие оценивалось посредством параметра togDetect по следующей зависимости:
№ logkj)
togDetect = е 1
Коэффициенты авторегрессионных (АР) моделей сигналов ЭМГ, содержащие информацию об интенсивности сокращения мышцы [8], определялись из выражения:
р
Х. Уах{k_i)+ek (3)
i= 1
-
Коэффициенты косинусного преобразования Фурье [8] определялись из авторегрессионных моделей:
i- 1
с 1=-^; 31=31 -2(1-/ / 1}апс,_1, (4)
i= 1
-
Определялись также стандартные амплитудные параметры, такие как среднее значение пиков,
-
-
Фурье. Определялись общая мощность спектра, средняя частота, медиана, частота спектральной составляющей, имеющей наибольшую амплитуду [4, 9].
Результаты исследований. Проведенная работа позволила определить зависимость параметров - 2
таблице верхнее значение параметра соответствует подъему плеча, нижнее — опусканию. - мс в моменты времени, соответствующие максимальным скоростям движения плеча.
.
Так, при нагрузке 5 кг и времени выполнения движения б с для параметра togDetect отличие состави-
-
7,9 .
При нагрузке 5 кг увеличение времени перемещения до 8 с привело к снижению различий 6,3 - же условиях параметр ZCизменяется при подъеме/опускании на 38 %. Увеличение нагрузки до 15 кг %, %.
Таблица 1
Зависимость параметров ЭМГ-сигнала биопотенциала бицепса от силовой нагрузки и кинематических параметров движения локтя
|
Вес, кг |
Время,с |
Длина окна, мс |
Углах, град/с |
тАУ, мкВ |
logDetect |
RMS, мкВ |
ZC |
WLen, мс |
|
5 |
6 |
300 |
67,09 45,21 |
0,0656 0,0430 |
0,043 0,029 |
0,082 0,053 |
46 22 |
6,786 4,165 |
|
7 |
300 |
59,50 34,53 |
0,0514 0,0489 |
0,034 0,032 |
0,064 0,063 |
28 22 |
5,161 4,529 |
|
|
8 |
300 |
56,92 35,69 |
0,0489 0,0500 |
0,032 0,034 |
0,060 0,050 |
39 24 |
4,529 4,648 |
|
|
Вес, кг |
Время,с |
Длина окна, мс |
Утах, град/с |
тАУ, мкВ |
logDetect |
RMS, мкВ |
ZC |
WLen, мс |
|
15 |
6 |
300 |
58,54 48,49 |
0,2233 0,2920 |
0,163 0,150 |
0,292 0,284 |
37 30 |
28,11 23,11 |
|
7 |
300 |
53,29 47,68 |
0,2081 0,2128 |
0,132 0,107 |
0,266 0,213 |
59 49 |
36,88 28,08 |
|
|
8 |
300 |
43,59 48,96 |
0,2965 0,1867 |
0,156 0,117 |
0,297 0,240 |
62 57 |
45,04 34,84 |
- виваемому усилию.
- сгибании и разгибании локтя неодинаковы (при сгибании больше) и зависят от нагрузки. При нагрузке 15 кг сигнал в 5,9 раза больше, чем при нагрузке 5 кг. Время, за которое совершались движения плеча при сгибании и разгибании, определялось по осциллограмме и составляло примерно 4 с и 3,9 с 3
Анализ в частотной области показал, что увеличение нагрузки сопровождается увеличением частоты разряда каждой двигательной единицы [1]. Поднимание груза 5 кг вызывало появление мак50 40-65 3,
20 3,
- временное суммирование всех активных двигательных единиц вызывает увеличение сигнала ЭМГ [1].
,
Wien зависят от направления движения. Эти параметры в основном уменьшаются в фазе разгибания локтя.
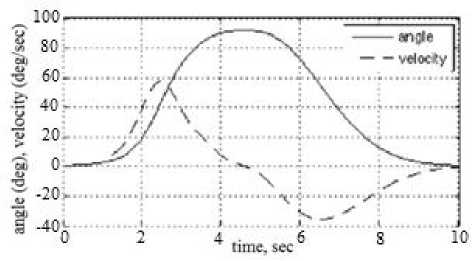
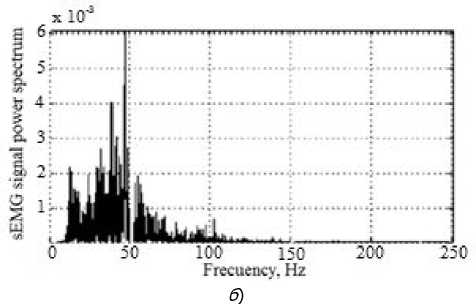
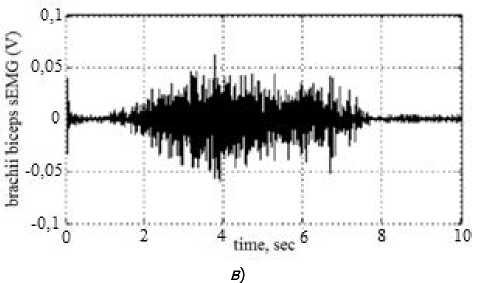
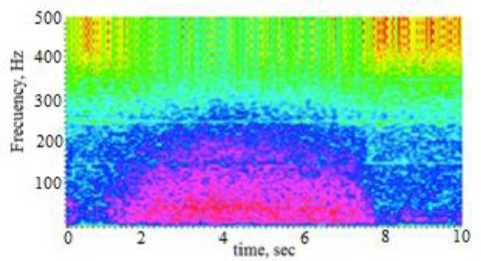
Рис. 2. Влияние углового перемещения и скорости локтевого сустава при поднимании и опускании груза 5 кг в течение 7 с: угловое перемещение и скорость (а); ЭМГ-сигнал бицепса (б);
спектр мощности сигнала ЭМГ (а); спектрограмма (г)
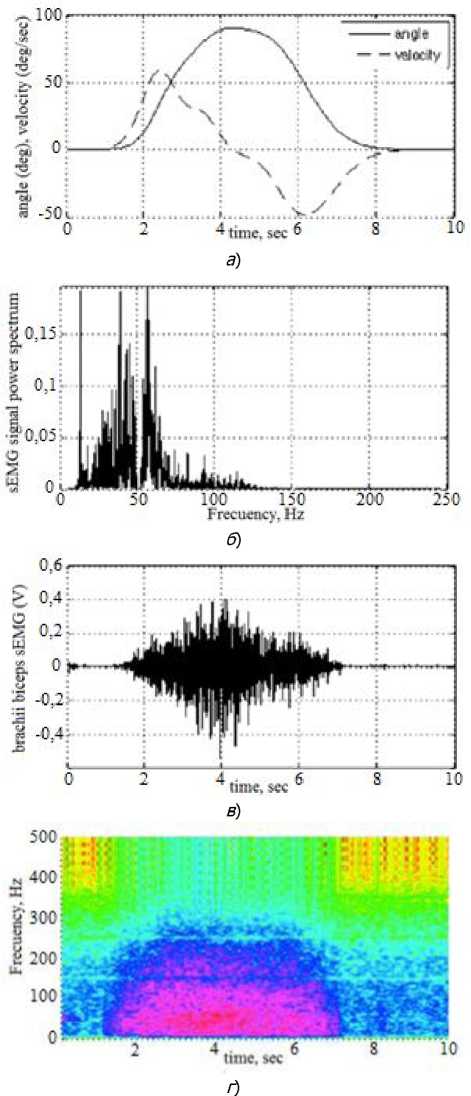
Рис. 3. Поднимание и опускание груза 15 кг в течение 7 с: угловое перемещение и скорость (а); ЭМГ-сигнал бицепса (б); спектр мощности ЭМГ-сигнала (а); спектрограмма (г)
На рис. 4 показано, что можно построить гиперплоскость для разделения на два класса значений параметров ZC и tog De ted ЭМГ-сигнала бицепса при движении локтя вверх и вниз.
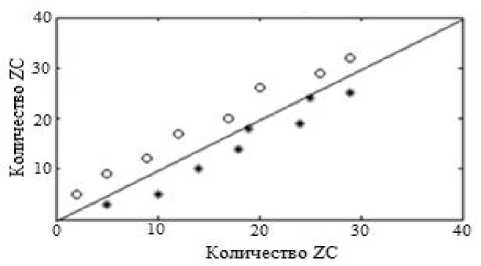
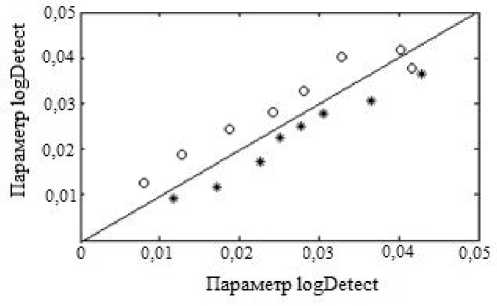
Рис. 4. Скаттерграммы ZC ( а) и logDetect (б): значения ZC при движении локтевого сустава от 0° до 85° отмечены кружками; значения togDetect при движении локтевого сустава от 85° до 0° отмечены звездочками
Заключение. Исследование влияния кинематических параметров движения локтя на поверхностный эмг-сигнал двуглавой мышцы плеча было выполнено в соответствии с современными рекомендациями и требованиями. Полученные результаты сопоставимы с данными из информационных источников. Выявленные информационные признаки могут быть использованы для синтеза интеллектуальной системы управления на основе нейронных сетей [10], которая позволит распознавать ЭМГ-сигнал и определять разные фазы движения. На этой основе может быть организовано управление, например, исполнительными электромеханическими системами в условиях неопределенности.
Список литературы Влияние кинематических параметров движения локтя на электромиографический сигнал двуглавой мышцы плеча
- Рангайян, Р. М. Анализ биомедицинских сигналов. Практический подход/Р. М. Рангайян. -Москва: Физматлит, 2007. -440 с.
- Knee angle-specific EMG normalization: The use of polynomial based EMG-angle relationships /J.-E. Earp //Journal Electromyogr. Kinesiol. -Режим доступа: (дата обращения 04.09.14) DOI: 10.1016/j.jelekin.2012.08.015
- De Luca, C.-J. Physiology and mathematics of myoelectric signals/C.-J. De Luca//IEEE Transactions on Biomedical Engineering. -1979 -V. 26. -P. 313-325.
- Konrad, P. The ABC of EMG A Practical Introduction to Kinesiological Electromyography. Version 1.4, March 2006. Noraxon INC /P. Konrad. -Режим доступа: http://www.noraxon.com/docs/education/abc-of-emg.pdf (дата обращения 04.09.14).
- Zeeshan, O.-K. Surface EMG pattern recognition for real-time control of a wrist exoskeleton /O.-K. Zeeshan//Biomedical Engineering Online. -Режим доступа: http://www.biomedical-engineering-online.com/content/9/1/41 (дата обращения 04.09.14).
- Phinyomark, A. Feature Extraction and Reduction of Wavelet Transform Coefficients for EMG Pattern Classification/A. Phinyomark //Electronics and Electrical Engineering. -2012. -№ 6. -P. 27-32.
- Сафин, Д. Р. Информационно-измерительная система управления биоэлектрическим протезом: автореф. дис. … канд. техн. наук/Д. Р. Сафин. -Астрахань, 2011. -22 с.
- Tkach, D. Study of stability of time-domain features for electromyographic pattern recognition /D. Tkach, He Huang, T.-A Kuiken//Journal of NeuroEngineering and Rehabilitation. -Режим доступа: http://www.jneuroengrehab.com/content/7/1/21/(дата обращения 04.09.14).
- Шайдук, А. М. Анализ спектра квазипериодических импульсов электромиограммы/А. М. Шайдук, С. А. Останин//Журнал радиоэлектроники. -2011. -№ 8. -С. 1-12.
- Чернышев, Ю. О. Разработка алгоритма интеллектуальной поддержки улучшения промежуточных решений оптимизационных задач/Ю. О. Чернышев, Н. Н Венцов, С. А. Мухтаров//Вестник Дон. гос. техн. ун-та. -2012. -№ 5.-С. 68-76.
- Rangayan, R. М. Analiz biomeditsinskikh signalov. Prakticheskiy podkhod. Moscow: FIZMATLIT, 2007, 440 p. (in Russian).
- Earp, J.-E., et al. Knee angle-specific EMG normalization: The use of polynomial based EMG-angle relationships. Journal Electromyogr. Kinesiol. Available at: (accessed: 04.09.14) DOI: 10.1016/j.jelekin.2012.08.015
- De Luca, C.-J. Physiology and mathematics of myoelectric signals. IEEE Transactions on Biomedical Engineering, 1979, vol. 26, pp. 313-325.
- Konrad, P. The ABC of EMG. A Practical Introduction to Kinesiological Electromyography. Version 1.4, March 2006. Noraxon INC. Available at: http://www.noraxon.com/docs/education/abc-of-emg.pdf (accessed: 04.09.14).
- Zeeshan, O.-K. Surface EMG pattern recognition for real-time control of a wrist exoskeleton. Biomedical Engineering Online. Available at: http://www.biomedical-engineering-online.com/content/9/1/41 (accessed: 04.09.14).
- Phinyomark, A., et al. Feature Extraction and Reduction of Wavelet Transform Coefficients for EMG Pattern Classification. Electronics and Electrical Engineering, 2012, no. 6, pp. 27-32.
- Safin, D. R. Informatsionno-izmeritel'naya sistema upravleniya bioelektricheskim protezom: avtoref. dis. … kand. tekhn. Nauk. Astrakhan, 2011, 22 p. (in Russian).
- Tkach, D., He Huang, Kuiken, T.-A. Study of stability of time-domain features for electromyographic pattern recognition. Journal of NeuroEngineering and Rehabilitation. Available at: http://www.jneuroengrehab.com/content/7/1/21/(accessed: 04.09.14).
- Shayduk, А. М., Ostanin, S. A. Analiz spektra kvaziperiodicheskikh impul'sov elektromiogrammy. Journal of Radio Electronics, 2011, no. 8, pp. 1-12 (in Russian).
- Chernyshev, Y. О., Ventsov, N. N., Mukhtarov, S. A. Razrabotka algoritma intellektual'noy podderzhki uluchsheniya promezhutochnykh resheniy optimizatsionnykh zadach. Vestnik of DSTU, 2012, no. 5, pp. 68-76 (in Russian).
