Влияние параметров настройки ПИ-регулятора на качество регулирования давления в системе водоснабжения с частотно-регулируемым электроприводом насоса

Автор: К.Н. Лебедев
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Электротехнологии, электрооборудование и энергоснабжение агропромышленного комплекса
Статья в выпуске: 2 (47), 2025 года.
Бесплатный доступ
Исследование посвящено проблеме оптимизации параметров настройки пропорционально-интегрального регулятора давления в системах водоснабжения. Теоретической основой работы являются положения теории автоматического регулирования, из которых следует, что пропорциональная составляющая Kp обеспечивает быстрый отклик на отклонения управляемой величины, а интегральная KI - плавное устранение статической ошибки. Экспериментально исследовалось влияние параметров настройки ПИ-регулятора на время регулирования и амплитуду колебаний давления. Использовалась лабораторная установка с центробежным насосом, преобразователем частоты и системой сбора данных. Результаты показали, что выбор параметров регулятора существенно влияет на качество переходных процессов. Установлено, что при KI < 1 регулятор не обеспечивает стабилизацию давления, а при Kp - 1 и Ki < 5 время регулирования существенно возрастает. Минимальная амплитуда колебаний давления достигнута при 2 ≤ Kp ≤ 3, а зависимость от KI оказалась слабовыраженной. Оптимальные параметры соответствуют Kp = 2,5–3 и KI = 10, обеспечивая минимальные время регулирования и амплитуду колебания давления.
ПИ-регулятор, системы водоснабжения, регулирование давления, преобразователь частоты, асинхронный насос
Короткий адрес: https://sciup.org/147251018
IDR: 147251018 | УДК: 681.5.076.2:628.16
Influence of PI controller setting parameters on the quality of pressure control in a water supply system with a variable-frequency pump drive
The study is devoted to the problem of optimizing the parameters of the proportional-integral pressure controller in water supply systems. The theoretical basis of the work is the provisions of the theory of automatic control, from which it follows that the proportional component Kp ensures a quick response to deviations of the controlled variable, and the integral KI - smooth elimination of the static error. The effect of the PI controller setting parameters on the control time and the amplitude of pressure oscillations was experimentally studied. A laboratory setup with a centrifugal pump, a frequency converter and a data acquisition system was used. The results showed that the choice of controller parameters significantly affects the quality of transient processes. It was found that at KI < 1 the controller does not provide pressure stabilization, and at Kp - 1 and Ki < 5 the control time increases significantly. The minimum amplitude of pressure oscillations is achieved at 2 ≤ Kp ≤ 3, and the dependence on KI turned out to be weakly expressed. Optimum parameters correspond to Kp = 2.5–3 and KI = 10, providing minimum control time and amplitude of pressure oscillations.
Текст научной статьи Влияние параметров настройки ПИ-регулятора на качество регулирования давления в системе водоснабжения с частотно-регулируемым электроприводом насоса
Введение.
Ключевым фактором эффективной работы систем водоснабжения является поддержание стабильного давления в подающих трубопроводах, т.е. его регулирование в терминах теории автоматического управления. При этом необходимо не только обеспечивать энергоэффективность работы и бесперебойную подачу воды, но и предотвращать гидроудары, снижать износ оборудования и минимизировать потери, так как низкое давление приводит к недостатку воды у высоко расположенных потребителей, а избыточное - к авариям и протечкам.
Эволюция методов поддержания давления в водоснабжении прошла путь от гравитационных систем с водонапорными башнями до современных систем с мембранными баками для компенсаций пиковых нагрузок и преобразователями частоты для управления асинхронными электронасосными агрегатами [1]. Важной особенностью энергоэффективных станций управления асинхронными электроприводами является использование пропорционально-интегрально-дифференциального (ПИД) закона регулирования, реализованного на базе преобразователей частоты (ПЧ). Многие ПЧ содержат пропорционально-интегральный (ПИ) регулятор, который представляет собой упрощённую версию ПИД-регулятора, где отсутствует дифференциальная составляющая [2]. Благодаря сочетанию эффективности и простоты, он широко применяется в промышленных системах управления, в том числе в водоснабжении.
Цифровой ПИ-регулятор сравнивает текущую величину давления, измеряемую датчиком, расположенным в подающем трубопроводе, с уставкой (заданным значением) и вычисляет необходимую величину частоты вращения асинхронного электропривода насоса, обеспечивающую компенсацию отклонения давления. Качество процесса регулирования зависит от настройки регулятора [2].
Результаты и обсуждение.
Для настройки ПИ-регуляторов, являющихся составной частью современных преобразователей частоты, используется несколько параметров, основными из которых являются пропорциональная составляющая с коэффициентом настройки K p и интегральная составляющая с коэффициентом настройки K i (рисунок 1) [3-4]. Пропорциональная составляющая позволяет компенсировать отклонение текущего значения давления от уставки и обеспечивает «мгновенную» реакцию регулятора, однако не обеспечивает точное поддержание заданного значения во всем диапазоне изменений водопотребления и приводит к колебанию давления возле него.
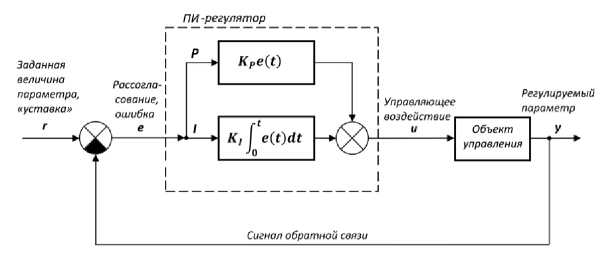
Рисунок 1 - Структурная схема ПИ-регулятора
Интегральная составляющая учитывает предшествующие отклонения и приводит к плавному устранению ошибки регулирования без остаточных колебаний.
Однако, при неправильной настройке ПИ-регулятора возможна неустойчивая работа и ухудшение качества регулирования. Это может проявляться в незатухающих колебаниях давления, частых изменениях частоты вращения электронасоса, гуле и вибрации в трубах из -за резкого изменения подачи, а система не выходит на заданное давление.
В экспериментальных исследованиях динамических процессов изменения давления воды при ПИ-регулировании использовалась лабораторная установка [5, 6], имеющая в своем составе асинхронный центробежный электронасный агрегат, гидроаккумулятор, бак для воды, датчик давления, манометр, вентиль на подающем трубопроводе для изменения расхода воды, преобразователь частоты ВЕСПЕР. Исследование переходных характеристик регулирования давления при изменении расхода воды осуществлялось при помощи датчика с выходом «токовая петля» и ПЭВМ с платой ввода аналоговых сигналов.
Экспериментальные исследования производились в следующем порядке: задаются коэффициенты настройки ПИ-регулятора K p и K i ; включается электропривод и при полностью открытом вентиле и установившейся частоте вращения включается режим записи данных, поступающих с датчика давления на ПЭВМ, затем перекрывается подача воды; наблюдая переходный процесс на экране ПК, при достижении установившегося значения давления запись данных останавливается. Далее, при помощи инструментария программного И38 Агротехника и энергообеспечение. - 2025. - № 2 (47)
обеспечения платы ввода сигналов определяется максимальная амплитуда колебания давления ЛР (в вольтах) и время регулирования (в секундах). Используя экспериментально полученную тарировочную характеристику измерительного канала величина сигнала датчика давления (В) переводится в единицы давления (МПа). Далее изменяются настройки ПИ-регулятора и предыдущий алгоритм действий повторяется. На рисунке 2 показан скриншот одного из вариантов переходной характеристики на экране ПЭВМ.
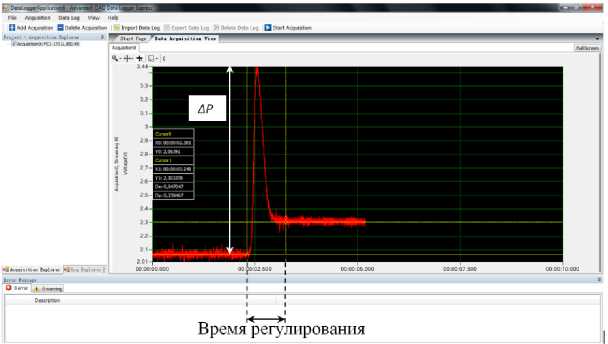
Рисунок 2 - Пример переходной характеристики
При помощи электронных таблиц полученные данные были обработаны, а результаты представлены в виде графических зависимостей (рисунки 3 и 4). На основании полученных данных выявлено, что при коэффициенте Ki < 1 не удается настроить ПИ-регулятор; время регулирования незначительно зависит от коэффициента Kp; зависимость от коэффициента Ki существенная в переделах 1-15, при дальнейшем увеличении Ki зависимость несущественна. При коэффициенте Kp > 1 и Ki < 5 при открытии вентиля время регулирования значительно возрастает, достигая величины десятков секунд.
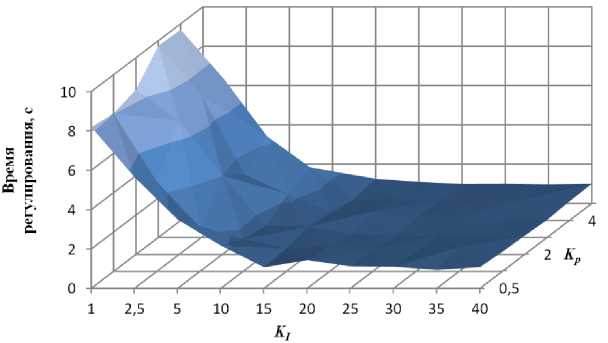
Рисунок 3 - Зависимость времени регулирования от параметров настройки ПИ-регулятора
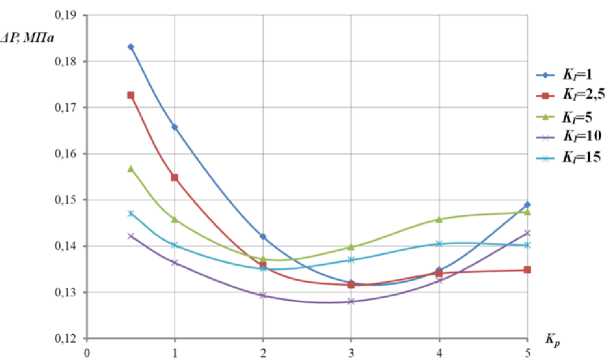
Рисунок 4 - Зависимость максимальной амплитуды колебаний давления от параметров настройки ПИ-регулятора
Существенное увеличение величин параметров настройки ПИ-регулятора при уменьшении расхода воды не полностью, а до небольших значений, приводит к автоколебательному режиму работы с периодом 0,35 с, что является проявлением неустойчивости (рисунок 5). Из анализа работ других исследователей выявлено, что аналогичные закономерности наблюдаются при ПИ-регулировании турбомеханизмов как класса асинхронных электроприводов, например вентиляторов с преобразователями частоты Danfoss [7].
Рисунок 5 - Переходная характеристика при малых расходах, K р = 53 и K I = 80.
Выводы.
Имеется выраженная зависимость максимальной амплитуды колебания давления ΔP от коэффициента K р с минимумом в области 2 ≤ K р ≤3. Зависимость максимальной амплитуды колебания давления ΔP от коэффициента K I выражена в меньшей степени и изменяется в переделах 10,2%. Минимальные время регулирования и амплитуда колебания давления, соответствуют величинам настройки ПИ-регулятора 2,5 ≤ K р ≤ 3 и K I = 10. Таким образом, в системах водоснабжения для достижения высокого качества регулирования давления необходима тщательная настройка регулятора.
