Влияние переменной вращающейся массы двигателя на показатели МТА на базе трактора класса 1,4

Автор: Кравченко Владимир Алексеевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 3 (27), 2014 года.
Бесплатный доступ
В статье приведены результаты исследований машинно-тракторного агрегата на базе трактора класса 1,4 с переменной вращающейся массой двигателя. Доказано, что применение на тракторе дополнительной вращающейся массы, подключаемой на соответствующих режимах движения к валу двигателя или первичному валу трансмиссии, способствует улучшению эксплуатационных и агротехнологических показателей машинно-тракторного агрегата. The article contains the results of machine-tractor unit’s researches on the basis of class 1,4 tractor having variable rotary mass of an engine. It is concluded that the use of additional ro-tary mass being linked at corresponding regimes of motion to the engine’s shaft or primary transmission shaft at the tractor furthers the improvement of operation indexes of a machine-tractor unit.
Вращающаяся масса двигателя, машинно-тракторный агрегат, тяговое сопротивление, производительность, расход топлива
Короткий адрес: https://sciup.org/140204300
IDR: 140204300 | УДК: 631.372
Текст научной статьи Влияние переменной вращающейся массы двигателя на показатели МТА на базе трактора класса 1,4
Применение скоростных энергонасыщенных тракторов в сельскохозяйственном производстве встречает ряд трудностей, связанных с неустановившимися процессами при движении машиннотракторных агрегатов (МТА). Машинно-тракторные агрегаты на базе скоростных тракторов характеризуются повышенным значением приведенных масс, что обусловливает большое их влияние на характер неустановившегося движения. Возникающие значительные инерционные нагрузки приводят к потерям части мощности двигателя, из-за чего МТА работает с меньшей производительностью и экономичностью, что заставляет изыскивать пути улучшения показателей машинно-тракторных агрегатов на базе скоростных тракторов [1, 2, 3, 4, 5, 6 и др.].
Анализ опубликованных работ в области исследований функционирования сельскохозяйственных машинно-тракторных агрегатов при неустановив-шихся тяговых нагрузках показал, что на показатели движения МТА при неустано-вившихся тяговых нагрузках большое влияние оказывают вращающиеся массы двигателя [5, 6].
На основании исследований, проведённых нами, было предложено устрой- ство, аккумулирующее потенциальную энергию и отдающее ее при изменении тяговой нагрузки (рисунок 1).
Её устройство основано на применении дополнительной вращающейся массы в виде свободного маховика, подключаемого автоматически на соответствующих режимах движения к основному маховику двигателя или к первичному валу трансмиссии. В результате этого уменьшается напряженность процесса разгона, улучшается переключение передач на ходу и обеспечивается уменьшение колебаний скорости вала двигателя при изменении тяговой нагрузки [5, 6].
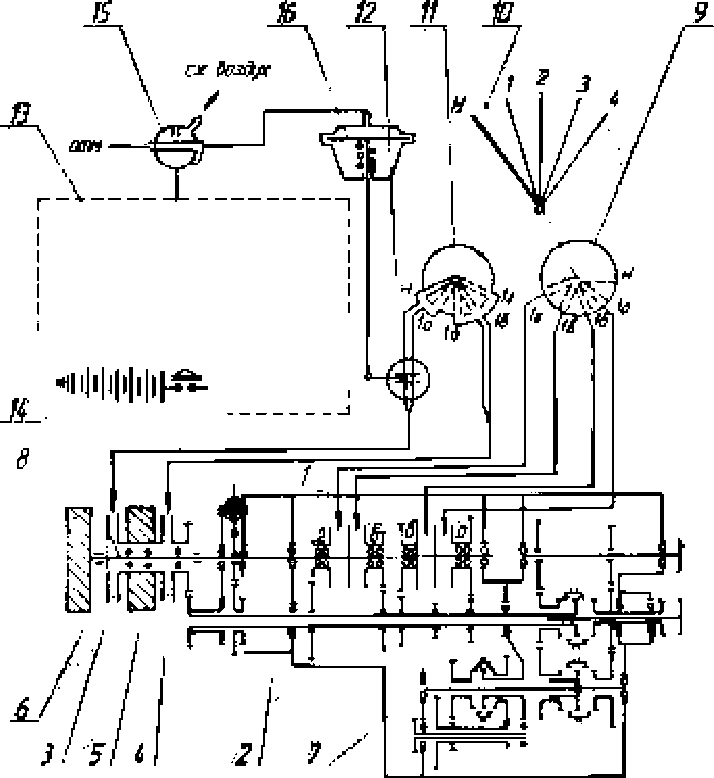
Рисунок 1 - Установка для автоматического управления дополнительной вращающейся массой двигателя
На валу, соединяющем двигатель и коробку передач, установлена дополнительная вращающаяся масса в виде свободного маховика 5. Этот маховик может быть соединен с основным маховиком двигателя 8 с помощью фрикционной муфты 3 или с промежуточным валом коробки с помощью фрикционной муфты 4 через шестеренчатую передачу. Основной золотник 9 соединен с рычагом переключения передач 10. Механизм управления муфтами дополнительного маховика состоит из дополнительного золотника 11, связанного с рычагом управления, и золотника 12 управления включения дополнительного маховика к основному.
Автоматическое устройство включения дополнительного маховика содержит
PIC-контроллер 13 DD1 (рисунок 2), к входным портам которого подключены датчики положения рейки топливного насоса К1 и К2, а к выходному порту через усилительный элемент — транзистор VT1, обмотка электромагнита Y1.
Для защиты транзистора VT1 от ЭДС самоиндукции при коммутации служит защитный диод VD2. Питание обмотки электромагнита осуществляется от бортовой сети через переключатель SA1, а питание Р1С-контроллера - через параметрический стабилизатор R3-VD1. Сердечник электромагнита соединен с краном управления 15 вакуумной камеры 16, которая механическими связями соединена с золотником управления включения дополнительного маховика к основному.
При включении питания происходит сброс РІС-контроллера на нулевой адрес программы, записанной в ПЗУ, с помощью цепочки C1-R5.
При работе двигателя на холостом ходу рычаг переключения передач 10 находится в нейтральном положении (рисунок I). Муфты 1 выключены, а муфта 3 включена и дополнительный маховик 5 подключен к основному маховику двигателя 8. РІС-контроллер 13 проверяет состоя ние датчиков положения рейки топливного насоса.
При трогании МТА снижается частота вращения коленчатого вала двигателя до минимального значения. При одновременно включенных маховиках, дополнительного и основного, снижение частоты вращения вала двигателя в первой фазе разгона будет меньше вследствие большего запаса кинетической энергии маховика.
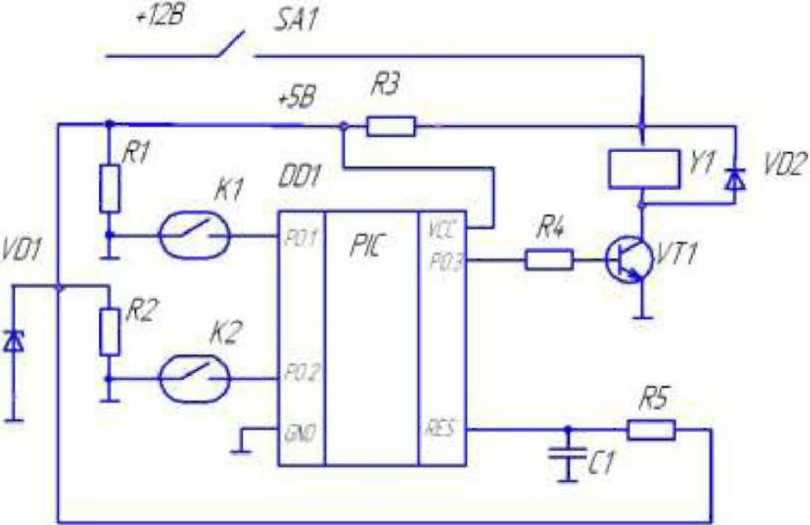
Рисунок 2 - Схема автоматики
В начале второй фазы разгона дополнительный маховик 5 отключается с помощью муфты 3 автоматически, вследствие чего уменьшается нагрузка на двигатель и разгон облегчается. Отключение дополнительного маховика происходит потому, что при минимальной частоте вращения вала двигателя с помощью рейки топливного насоса замыкаются контакты К1 (рисунок 2) датчика положения рейки топливного насоса. Включится электромагнит Ү1, втянется его сердечник, кран 15 повернется так, что соединится полость вакуумной камеры 20 с ресивером сжатого воздуха, от чего повернется золотник 12 и выключится подача масла к муфте 3, дополнительный маховик 5 отключится от основного.
Разгон агрегата будет происходить с основным маховиком двигателя 8 ускоренно по времени до установившейся частоты вращения коленчатого вала двигателя. При этом разгон МТА протекает менее напряженно, уменьшается нагрузка на двигатель.
Когда агрегат выйдет на установленный режим работы, дополнительный маховик 5 должен быть подключен к основному маховику 8 с помощью включения муфты 3. Это происходит тогда, когда при разгрузке двигателя и обратном ходе рейки топливного насоса замкнутся контакты К2 датчика положения рейки топливного насоса. Электромагнит Ү1 отключится. Под действием пружины вакуумной камеры 16 повернется кран 15, соединит замкнутую полость камеры с атмосферой, золотник 12 повернется, включится муфта 3 и дополнительный маховик 5 подключится к основному маховику 8.
Переход на вторую передачу осуществляется переключением рычага 10 на вторую позицию, в результате чего золотник 9 и 11 повернутся в позицию 16 и включится вторая передача, выключится муфта 3 и включится муфта 4, а дополнительный маховик 5 подключится к промежуточному валу коробки передач. На вто- ром этапе кинетическая энергия дополнительного маховика 5 будет расходоваться на поддержание скорости движения на участке перехода, а энергия двигателя и основного маховика 8 - на разгон агрегата. На втором этапе кинетическая энергия передается по двухпоточной схеме.
Переход на третью и четвертую передачи будет протекать аналогично.
Режим остановки машинно-тракторного агрегата характеризуется тем, что рычаг переключения передач 10 переводится в нейтральную позицию, в результате чего выключится передача, а дополнительный маховик 5 подключится с помощью муфты 3 к основному маховику двигателя 8.
Изменения момента сопротивления и тягового усилия на крюке трактора носят случайный характер [1, 2, 5, 7, 8, 9, 10]. По этому при исследовании рабочих процессов МТА и выборе оптимальных его параметров и режимов работы необходимо учитывать стохастический характер сопротивления движению и оценивать процессы изменения сил сопротивления статистическими показателями.
Для оценки влияния переменных вращающихся масс двигателя на показатели работы был записан процесс работы культиваторного агрегата на базе трактора класса 1,4 в серийном и опытном вариантах [11].
В результате обработки были получены значения математических ожиданий, среднеквадратических отклонений угловой скорости вала двигателя, поступательной скорости агрегата и тяговой нагрузки (таблица 1).
Таблица 1 - Математическое ожидание и среднеквадратические отклонения показателей движения МТА на культивации
|
Показатели |
Параметры |
Варианты агрегата |
|
|
серийный |
с дополнительной вращающейся массой двигателя |
||
|
Математическое |
Ркр - кН |
7,0 |
6,6 |
|
ожидание |
G\ , с"1 |
182,7 |
190,3 |
|
Г, м/с |
2,35 |
2,46 |
|
|
Среднеквадратическое |
Л,. кН |
1,8 |
1,5 |
|
отклонение |
бц, с"1 |
8,3 |
7,5 |
|
V , м/с |
0,29 |
0,28 |
|
Из данных таблицы 1 следует, что с дополнительной вращающейся массой (Jj^ =4,3 кгм2 по сравнению с Jv = 2,5 кгм2) тяговое сопротивление культиватора снижается на 5,7%, одновременно возрастают угловая скорость вала двигателя на 4,2% и поступательная скорость трактора на 4,7%. Снижаются и колебания (среднеквадратическое отклонения) этих величин относительно их средних значений. Для тягового сопротивления снижение составляет 16,7%, для угловой скорости вала двигателя 9,6%, для скорости трактора 3,5%.
Отмеченное влияние вращающихся масс двигателя и жесткости силовой передачи объясняется следующим:
-
- тяговое сопротивление является для МТА внутренней силой связи между трактором и культиватором, величина которой определяется внешним воздействием почвы на рабочие органы культиватора и взаимодействием звеньев через упругие и демпфирующие связи между ними;
-
- применение переменной вращающейся массы двигателя создает более благоприятные условия для формирования характера нагрузки узлов трактора как при неустановившихся режимах движения, так и при установившихся.
Следствием этого является снижение нагрузки на двигатель и ведущие колеса трактора, от чего поступательная скорость трактора возрастает по сравнению с серийным вариантом.
Результаты агротехнической оценки качества работы сравниваемых агрегатов (таблица 2) свидетельствуют о том, что глубина пахоты экспериментального агрегата была более равномерной на всех передачах.
При глубине пахоты 20...22 см коэффициент вариации изменялся для экспериментального агрегата в пределах 5,1...6,2%, а для серийного - в пределах 8,4...12%. При глубине пахоты 25...27 см этот же показатель для экспериментального агрегата составил 5,5%, а для серийного - 7,5.8,2%.
В целом коэффициент вариации глубины пахоты для экспериментального агрегата в сравнении с серийным был меньше в 1,5...2,0 раза.
Кроме того, у экспериментального агрегата с повышением скорости движения наблюдается улучшение качества обработки - лучше заделываются растительные остатки, улучшаются подрезание и оборот пласта, пашня становится более слитной.
Экспериментальный агрегат имеет лучшие показатели в сравнении с серийным и по устойчивости ширины захвата: среднеквадратическое отклонение ширины захвата экспериментального агрегата колеблется в пределах 0,98...1,65 см, а для серийного при тех же условиях -1,98.2,28 см, то есть больше примерно в два раза.
Выравненность дна борозды является важным оценочным показателем работы пахотных агрегатов, особенно на участках с неровным рельефом.
Анализ продольных профилограмм пахоты (таблица 2) показывает, что экспериментальный агрегат меньше копирует микронеровности поверхности поля, делает дно борозды более ровным.
О состоянии дна борозды можно судить по среднему значению отклонения Акср высоты микронеровностей от условной средней линии профиля дна борозды. Чем меньше эта величина, тем дно борозды будет ровнее. С возрастанием величины отклонения А/z становятся заметными во- ср гнутости и выпуклости дна борозды.
О степени выровненности профиля дна борозды относительно поверхности поля для качественной оценки работы пахотного агрегата можно судить по разнице отклонений А для профилей дна борозды и поверхности поля (таблица 2):
А = Ак д -АН" , ср ср '
где АНСр, АИ" р - среднее значение отклонения высоты микронеровностей от условной средней линии соответственно для профиля дна борозды и профиля поверхности поля.
В том случае, когда среднее значение отклонения высоты микронеровностей дна борозды от условной средней линии меньше среднего значения отклонения высоты микронеровностей поверхности поля, дно борозды и поверхность пашни сравнительно выравнены.
Во всех случаях экспериментальных исследований сравниваемых агрегатов после прохода экспериментального агрегата отклонения неровностей микропрофиля дна борозды от условной средней линии были значительно меньше, чем после прохода серийного агрегата. Величина А для экспериментального агрегата меньше нуля, а для серийного - больше нуля. Это свидетельствует о том, что экспериментальный агрегат выравнивает пашню, а серийный делает её более гребнистой, что требует дополнительных операций по выравниванию вспаханного поля.
Более качественная обработка почвы для пахотного агрегата осуществляется при поступательной скорости, лежащей в пределах от 5 до 9 км/ч.
Таблица 2 Сравнительные данные лабораторно-полевых испытаний серийного и экспериментального пахотных агрегатов на базе трактора класса 1.4
|
Тип атреі ата |
1 кредача |
Устойчивость глубины пахоты |
Устойчивость ширины захвата |
да;, см |
ДА^.см |
J. см |
||||
|
А/. см |
а. см |
V. % |
М .см |
а. см |
у, % |
|||||
|
I дубина обработки 20...22 см |
||||||||||
|
Экспери мен тал ьн ый |
IV |
20.8 |
1.0? |
5.1 |
106 |
1,65 |
2.5 |
2.Х |
3.1 |
-0.3 |
|
Экспериментальный |
И! |
21.1 |
1,10 |
6.2 |
1116 |
1.51 |
1.4 |
3,4 |
4.5 |
•и |
|
Серийный (с ГСВ) |
III |
20.2 |
1.91 |
8.4 |
И)? |
1.98 |
1.9 |
5,6 |
4.2 |
1.4 |
|
Серийный (без ГСВ) |
111 |
20.1 |
2.51 |
12.4 |
ЮЗ |
2.75 |
2.6 |
4.4 |
3.4 |
1.0 |
|
Глубина обработки 25...21 |
см |
|||||||||
|
1 Экспериментальный |
IV |
26.0 |
1.42 |
5.5 |
105 |
1,05 |
1.0 |
3.0 |
4.7 |
•1,7 |
|
Экспери ментальный |
111 |
26.7 |
1.47 |
5.5 |
108 |
0.98 |
0.9 |
3.5 |
5.0 |
•и |
|
Серийный (с ГСВ) |
111 |
25.0 |
1.88 |
7,5 |
106 |
227 |
2,1 |
5.5 |
3,3 |
2.2 |
|
Серийный (без ГСВ) |
111 |
25.7 |
2.11 |
X? |
105 |
2.28 |
2,2 |
4.8 |
3.1 |
1.7 |
Примечание: М - математическое ожидание случайной величины;
а срелнсквалратичсское отклонение;
г - коэффициент вариации;
Mi, среднее значение отклонения высоты микронеровностей от условной средней линии для профиля дна борозды;
ДА" - среднее значение отклонения высоты микронеровностей от условной средней линии для профиля поверхности поля;
Д - разница отклонений профилей дна борозды и поверхности поля.
3(27)2014 Технологии, средства механизации и энергетическое оборудование
Экспериментальный пахотный агрегат имеет меньше колебаний тяговой нагрузки, агрегат идёт плавнее. Вспашка производится на более высоких скоростях, а следовательно, при одном и том же качестве вспашки с большей производительностью.
Производительность серийного пахотного агрегата (глубина 20...22 см) составила 0,43...0,52 га/ч при расходе топлива 19,1. ..15,8 кг/га (таблица 3).
Эти же показатели агрегата при пахоте на глубину 25...27 см составили по производительности 0,36...0,47 га/ч, а по расходу топлива24,8... 18,3 кг/га.
Производительность экспериментального агрегата при пахоте на глубину 20...22 см составила 0,64 га/ч при расходе топлива 13,4 кг/га.
При глубине пахоты 25...27 см производительность составила 0,55 га/ч при расходе топлива 15,6 кг/га.
Анализ данных сравнительных испытаний машинно-тракторных агрегатов показывает следующее:
-
- максимальная производительность серийного пахотного агрегата на базе трактора класса 1,4 составила 0,36...0,52 га/ч при расходе топлива 24,8... 15,8 кг/га, а максимальная производительность экспериментального пахотного агрегата -0,55... 0,64 га/ч при расходе топлива 15,6... 13,4 кг/га, т.е. производительность экспериментального агрегата повысилась на 23,0...52,8% в сравнении с серийным агрегатом;
-
- расход топлива снижается на 9... 13%;
-
- буксование трактора эксперимен-тал ьного агрегата находится в пределах допустимой величины (10,9... 15,5%), а при работе серийного агрегата буксование ведущих колёс трактора находится в пределах 14,8..38,6%.
Таблица 3 - Результаты лабораторно-полевых испытаний серийного и экспериментального пахотных агрегатов
|
Тип агрегата |
Передача |
Рабочая скорость, км/ч |
Буксование, % |
Про из вод ител ь-ность, га/ч |
Расход топлива, кг/га |
|
Глубина обработки 20. ..22 см |
|||||
|
Экспериментальный |
IV |
6,0 |
10,9 |
0,64 |
13,4 |
|
Экспериментальный |
III |
5,4 |
10,4 |
0,57 |
14,0 |
|
Серийный (с ГСВ) |
III |
4,9 |
14,8 |
0,52 |
15,8 |
|
Серийный (без ГСВ) |
III |
4,2 |
26,5 |
0,43 |
19,1 |
|
Глубина обработки 25.. .27 см |
|||||
|
Экспериментальный |
IV |
5,2 |
13,8 |
0,55 |
15,6 |
|
Экспериментальный |
ш |
4,8 |
15,5 |
0,52 |
16,9 |
|
Серийный (с ГСВ) |
III |
4,5 |
23,5 |
0,47 |
18,3 |
|
Серийный (без ГСВ) |
III |
3,4 |
38,6 |
0,36 |
24,8 |
Повышение производительности МТА объясняется тем, что у экспериментального агрегата трактор работает с большей загрузкой двигателя (коэффициент загрузки двигателя — 0,89), так как уменьшается влияние колебаний внешней нагрузки, увеличивается скорость движения при стабилизации её средней величины.
Результаты сравнительных испытаний на культивации показали, что приме нение дополнительной инерционной массы двигателя позволяет в реальных условиях эксплуатации получить увеличение скорости движения агрегата на 4,7% и снижение сопротивления культиватора на 5,7%.
Таким образом, установка дополнительной «инерционной массы» существенно снижает влияние колебаний внешней нагрузки на выходные показатели МТА: возрастает угловая скорость коленчатого вала двигателя; увеличивается скорость движения агрегата; повышается производительность МТ А; улучшается качество выполнения технологической операции.
Список литературы Влияние переменной вращающейся массы двигателя на показатели МТА на базе трактора класса 1,4
- Агеев, Л.И. Основы расчета оптимальных и допустимых режимов работы машин-но-тракторных агрегатов/Л.И. Агеев. -Л.: Колос, 1978. -296 с.
- Барский, И.Б. Динамика трактора/И.Б. Барский, В.Я. Анилович, Г.М. Кутьков. -М.: Машиностроение, 1973. -280 с.
- Иофинов, С.А. Определение эксплуатационных параметров и показателей работы агрегатов при вероятностном характере исследуемых величин/С.А. Иофинов, Б.К. Микуберг//Механизация и электрификация социалистического сельского хозяйства. -1971. -№ 12. -С. 42…46.
- Беспамятнова, Н.М. Научно-методические основы адаптации почвообрабатывающих и посевных машин/Н.М. Беспамятнова. -Ростов н/Д: ООО «Терра», ИПК «Гефест», 2002. -176 с.
- Кравченко, В.А. Влияние переменной инерционной массы двигателя на некоторые показатели разгона машинно-тракторного агрегата/В.А. Кравченко//Вестник аграрной науки Дона: Теоретический и научно-практический журнал. Выпуск 3. -Зерноград: ФГБОУ ВПО АЧГАА. -2010. -С. 35…40.
- Кравченко, В.А. Повышение динамических и эксплуатационных показателей сельскохозяйственных машинно-тракторных агрегатов: монография/В.А. Кравченко. -Зерноград: ФГОУ ВПО АЧГАА. -2010. -224 с.
- Dudushki, I. Pesearch of units for merged cultivation//Селскостоп. Техн. -2012. -Vol. 49, № 1. -Р. 21…27.
- Куландин, Н.Ф. Методика подбора сельскохозяйственных машин к трактору «БЕЛАРУС 3522» тягового класса 5(6)/Н.Ф. Куландин, И.Н. Стасюкевич//Современные проблемы освоения новой техники, технологий, организации технологий сервиса в АПК/Белоруссий государственный аграрно-технологический университете. -Минск, 2011. С. 61…67.
- Calambosova, J. Three-year study on soil roughness under the contromed traffic system/J. Calambosova, V. Rataj, L. Velcicky.//Acta technol. Agr. -2012. -Vol. 15, № 2. -Р. 38…40.
- Kollar, L. Grunde und Moglichkeiten für automatische Lengung mobiller Land-wirtschaftlister Aggregate./L. Kollar//Agrartechnik. -1980. -Jg. 30. -№ 3. -S. 95…98.
- Box, G. E. P. Statistics for experimenters: An introduction to design, data analysis, and model building/G. E. P. Box, W. G. Hunter, S. J. Hunter. -New York: Wiley, 1978.
