Влияние поперечной нагрузки на устойчивость сжимаемого продольной силой стержня

Автор: Тарасов В.Н.
Журнал: Известия Коми научного центра УрО РАН @izvestia-komisc
Рубрика: Научные статьи
Статья в выпуске: 4 (62), 2023 года.
Бесплатный доступ
Работа посвящена исследованию влияния нормальной нагрузки на устойчивость сжимаемого продольной силой стержня. Рассматриваются два вида граничных условий: граничные условия жесткой заделки и условия шарнирного опирания. Отмечается, что в случае граничных условий шарнирного опирания форма упругой линии стержня качественно зависит от величины продольной силы.
Упругая энергия, вариационная задача, упругая линия, уравнение эйлера, критическая сила
Короткий адрес: https://sciup.org/149143592
IDR: 149143592 | УДК: 539.3 | DOI: 10.19110/1994-5655-2023-4-18-22
Influence of a transversal load on the stability of a rod compressed by a longitudinal force
The work is devoted to the study of the effect of normal load on the stability of a rod compressed by a longitudinal force. Two types of boundary conditions are considered: the boundary conditions of rigid sealing and the conditions of hinge support. It is noted that in the case of the boundary conditions of the hinge bearing, the shape of the elastic line of the rod qualitatively depends on the magnitude of the longitudinal force.
Текст научной статьи Влияние поперечной нагрузки на устойчивость сжимаемого продольной силой стержня
Исследование задач устойчивости гибких элементов конструкций и упругих систем в настоящее время занимает одно из центральных мест в механике деформируемого твердого тела и представляет значительный интерес. Теория устойчивости упругих систем берет свое начало с работ Эйлера по теории продольного изгиба [1]. Проблемы упругой устойчивости исследовались многими авторами [2–5]. Вариационный подход к данным задачам был развит С.П. Тимошенко [6], который решил ряд задач устойчивости стержней, пластин и оболочек. На основе вариационного подхода можно доказать теорему существования решения уравнений равновесия. Также можно убедиться, что в устойчивом положении равновесия функционал полной энергии достигает локального минимума. Общая концепция упругой бифуркационной устойчивости предложена в монографии В.В. Новожилова [7]. В связи со стремительным развитием вычислительной техники и появлением универсальных численных алгоритмов решения краевых задач (метод граничных элементов, метод конечных элементов), к настоящему времени имеются комплексы программ, позволяющие рассчитывать упругие конструкции на устойчивость, например [3].
В общем случае проблемы упругой устойчивости сводятся к нахождению точек бифуркации некоторых нелинейных уравнений, или к нахождению параметров, при которых некоторая вариационная задача имеет несколько решений.
Предположим, что полная потенциальная энергия упругой конструкции имеет вид
Ф( u, X ) = F ( u ) + G ( u,X ) , (1)
где u – функция, характеризующая состояние упругой системы (это может быть, например, вектор перемещения, тензор деформации и т.д.), F ( u ) - упругая энергия системы, G(u, X ) - работа внешних сил, X - параметр, характеризующий внешнюю нагрузку. Пусть уравнение Эйлера для функционала (1) записывается в виде
L ( u,X ) = 0 , (2)
где L – дифференциальный, вообще говоря, нелинейный оператор. Поиск критического параметра λ сводится к нахождению точек бифуркации уравнения (2) .
Одной из важных проблем является задача изучения влияния односторонних связей на устойчивость упругой конструкции. Наличие таких связей приводит к появлению неравенств, которым должны удовлетворять перемещения.
Интересные задачи устойчивости упругих систем при односторонних ограничениях на перемещения решены В.И. Феодосьевым [4]. Он рассмотрел задачу плоского изгиба упругого стержня, находящегося в первоначальном недеформированном состоянии между двумя жесткими стенками на одинаковом расстоянии от каждой из них, исследована задача устойчивости тонкостенного кольца, сжимаемого накинутой на него абсолютно гибкой нерастя- жимой нитью, натягиваемой силой, а также кольца, вставленного в жесткую обойму. Влияние односторонних связей на устойчивость цилиндрических оболочек при осевом сжатии изучалось в работе [8]. Анализ упругих систем на устойчивость при наличии односторонних (неудерживающих) связей сводится к определению параметров, при которых задача оптимизации имеет не единственное решение. Это, в свою очередь, приводит к необходимости решать невыпуклые задачи математического программирования с применением методов глобальной оптимизации. Общая теория и методы решения задач устойчивости упругих систем при наличии односторонних связей изложены в работе [9]. Во многих случаях системы, ограниченные односторонними связями, сводятся к идентификации условной положительности квадратичных форм на конусах. Алгебраический критерий условной положительности в самом важном случае, когда конус есть неотрицательный ортант в Rn, предложен в работах В.Л. Крепса [10] и Л.Б. Рапопорта [11]. Систематическому применению неравенств в механике посвящена монография П. Панагиотопу-лоса [12].
Некоторые контактные задачи, в том числе и задачи устойчивости упругих систем при наличии односторонних ограничений на перемещения, и методы их решений рассмотрены в трудах [13], [14].
В данной работе показано влияние поперечной нагрузки на устойчивость сжимаемого продольной силой стержня. Предполается, что прогибы стержня с одной стороны ограничены жестким препятствием.
Гибкий стержень, нагруженный продольной сжимающей силой и поперечной нагрузкой
l и (i; w ) = / EJ^2-2-p (1 -cos
Ф )+ qw ds ^ min , w,φ
где E — модуль Юнга, J — момент инерции поперечного сечения стержня, l — длина стержня. При этом выполняются геометрические равенства
w ’ s = sin ф, z ‘ s = cos ф. (4)
Предположим, что сила P больше первой критической силы Эйлера и выполнено неравенство 4 п 2 EJ/l 2 < P < 16 п 2 EJ/l 2 . Пусть ( l 1 ,l 2 ) — интервал максимальной длины, на котором w ( s ) > 0 . Ясно, что ф ( l 1 ) = ф ( l 2 ) = 0 , w ( l 1 ) = w ( l 2 ) = 0 , поэтому можно считать, что l 1 = 0 , l 2 > l/ 2 и w ( s ) = 0 , s Е [0 , l 2 ] . Определение перемещений на интервале [0 ,l 2 ] сводится к задаче изопериметрического типа
U ( w, l 2 ) ^ min , w,φ,l 2
l 2
j sin фds = 0
при условиях (3), (4).
Составим по обычным правилам вариационного исчисления функционал Лагранжа
L ( w,ф,l 2 ) = U ( w,l 2 ) +
l 2
+ J ( A ( w S
— sin ф ) + m 1 sin ф ) ds.
Система уравнений Эйлера для функционала L ( w,ф,l 2 ) имеет вид
Рассмотрим стержень длины l, нагруженный продольной сжимающей силой P и поперечной силой q > 0 . Пусть w = w ( s ) , z = z ( s ) — координаты точек упругой линии, s — длина дуги, w ( s ) — прогиб, ось z совпадает с первоначальной недеформированной осью стержня (рис. 1).
EJф'a s + P sin ф — m 1 cos ф + A cos ф = 0 ,
A ’ = q. (7)
Из второго уравнения получаем A = — qs + m 2 . Сделаем замену переменных s = l 2 т и введем обозначения
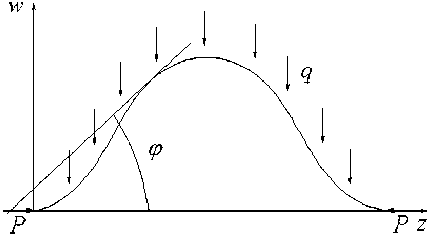
Рисунок 1. Направление действующих сил и форма прогиба стержня.
Figure 1. The direction of the acting forces and the shape of the deflection of the rod.
Предположим, что прогиб стержня ограничен с одной стороны жестким препятствием, так что w ( s ) > 0 . Обозначим через φ угол между касательной к упругой линии и осью z. Для определенности предположим, что выполнены граничные условия жесткой заделки
k 2
Pl 2
EJ ,
= ql 3
p EJ'
m =
( m i — m 2 ) l 2 1
EJ + 2 P"
Первое из уравнений (7) записывается в виде
φ ′′
—k 2 sin ф — p ( т —
cos ф + m cos ф,
Ф = 0 , w = 0 при s = 0 ,l. (3)
Определение упругой линии стержня сводится к следующей вариационной проблеме
где штрих обозначает производную по τ . Из условия минимума функционала (6) по переменной l 2 (если l 2 < l ) получаем еще одно граничное условие ф (1) = 0 . Уравнение (9) не интегрируется в квадратурах.
Умножая обе части уравнения (9) на ф ( т ) и интегрируя в пределах от 0 до 1, получим ф 2 (1) = ф 2 (0) . Ясно, что ф (0) > 0 и ф (1) > 0 , ибо в противном случае в достаточно малой окрестности концов интервала [0 , 1] прогиб будет принимать отрицательные значения. Но тогда ф (0) = ф (1) . Из последнего равенства следует, что функция w ( т ) симметрична относительно середины интервала [0 , 1] , т.е. для т Е [0 , 2 ]
w (2 —т )= w (2+ т ) , ф (2 —т )= — ф (2+ т ) •
Интегрируя уравнение (7) в пределах от 0 до1, получим, что 1
m J cos фdт = 0 , а значит, и m = 0 .
Граничные условия жесткой заделки
Пусть ф(а; т) — решение уравнения (9) при m = 0 c начальными условиями ф(0) = 0, ф'(0) = а (решение τ задачи Коши) и w(а; т) = / sin(ф(а; t))dt. Обозначим 0
ш ( а ) = ф ( а ; 1) , ф ( а ) = w ( а ; 1) , тогда
£ ( а ) = V w 2 ( а ) + ш 2 ( а ) .
При фиксированных значениях k и ρ находим все значения параметра α, при которых
С ( а ) = 0 , (10)
т.е. одновременно ^ ( а ) = 0 и ш ( а ) = 0 . Если w ( а ; т ) > 0 для всех значений т Е [0 , 1] , то при заданных к и р найдено допустимое положение равновесия.
Графики функции £ ( а ) представлены на рис. 2 и 3. Результаты вычислений для к = 2 . 05 п приведены в табл. 1.
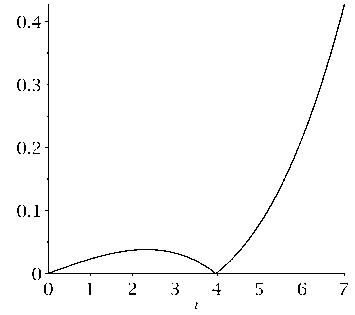
Рисунок 2. График функции ξ ( α ) при k = 2 . 05 π, q = 0 для граничных условий жесткой заделки.
Figure 2. Graph of the function ξ ( α ) for k = 2 . 05 π, q = 0 for boundary conditions of rigid termination.
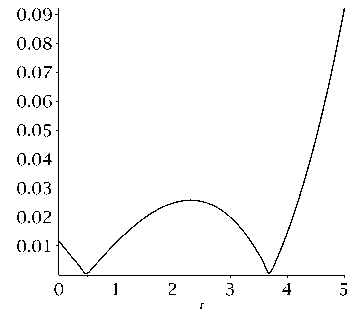
Рисунок 3. График функции ξ ( α ) при k = 2 . 05 π, q = 0 . 5 для граничных условий жесткой заделки.
Figure 3. Graph of the function ξ ( α ) for k = 2 . 05 π, q = 0 . 5 for boundary conditions of rigid termination.
Таблица 1
Результаты вычислений при k = 2 . 05 π , граничные условия жесткой заделки
Table 1
Calculation results for k = 2 . 05 π , boundary conditions of rigid termination
|
ρ |
0 |
0 . 5 |
1 |
1 . 3 |
р* = 1 . 6 |
|
α 1 |
0 |
0 . 471 |
0 . 414 |
1 . 414 |
2 . 26 |
|
U 1 |
0 |
- 0 . 05 |
- 0 . 268 |
- 0 . 499 |
- 1 . 27 |
|
w max |
0 |
0 . 025 |
0 . 054 |
0 . 1285 |
0 . 115 |
|
α 2 |
3 . 958 |
3 . 02 |
6 . 55 |
6 . 4 |
2 . 26 |
|
U 2 |
- 3 . 868 |
- 2 . 693 |
- 2 . 69 |
- 2 . 256 |
- 1 . 274 |
|
w max |
0 . 1909 |
0 . 179 |
0 . 163 |
0 . 151 |
0 . 115 |
При р = 0 существуют два корня уравнения (10): первый корень а 1 = 0 соответствует тривиальному решению ф(т) = 0, w(т) = 0, т Е [0, 1], второй корень дает нетривиальное положение равновесия стержня. При при увеличении ρ появляется два нетривиальных решения уравнения (10) (рис. 3).
При ρ > ρ∗ у уравнения (10) нет решений. При мень- ших значениях ρ имеются два корня α1 и α2, α1 < α2, (а2 — а 1) ^ 0 при р ^ р*. Первый корень а 1 возрастает, второй корень а2 убывает, а при р = р* они сливаются в один. В табл. 1 приведены U1 и U2 — значения интеграла U(w) = J фр'2 — к2 (1 — cos ф) — рw^dт. Этот интеграл с точностью до положительной константы совпадает с полной энергией системы. U1 соответствует корню α1, а U2 — корню α2.
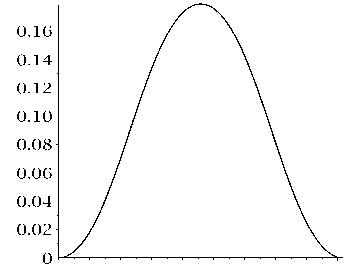
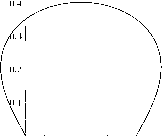
На рис. 4 представлена упругая кривая при граничных условиях жесткой заделки. На этом и последующих рисунках по оси абсцисс отложена координата z ( т ) , а по оси ординат — координата w ( т ) .
О 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Рисунок 4. Упругая кривая {z ( т ); w ( т ) }, т Е [0 , 1] , к = 2 . 05 п, ρ = 0 . 5 для граничных условий жесткой заделки.
Figure 4. Elastic curve {z ( т ); w ( т ) }, т Е [0 , 1] , к = 2 . 05 п , р = 0 . 5 , for boundary conditions of rigid termination.
Граничные условия шарнирного опирания
Эти условия означают, что на концах стержня отсутствуют перемещения и изгибающие моменты равны нулю, т.е.
w (0) = 0 , w " (0) = 0 , w (1) = 0 , w '' (1) = 0 . (11)
Из (4) следует, что (11) эквивалентно условиям ф'(s) = 0, w(s) = 0 при s = 0,l.
На рис. 5 представлена упругая кривая при к = 1 . 3 п, q = 0 .
0.05 0 0.05 0.10 0.15 0.20 0.25
Рисунок 5. Упругая кривая {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, ρ = 0 для граничных условий шарнирного опирания.
Figure 5. Elastic curve {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, р = 0 for boundary conditions of the hinge support.
При данных значениях параметров ( к = 1 . 3 п, q = 0) существует единственная кривая, которая является формой равновесия. Как и в случае граничных условий жесткой заделки при q > 0 , обозначим w ( а ) = ф ( а ; 1) , ^ ( а ) = w ( а ; 1) , £ ( а ) = ^ w 2 ( а) + w 2 ( а ) . Далее находим все значения параметра а , при которых £ ( а) = 0 , т.е.
w (0) = 0 , w ‘ (0) = 0 , w (1) = 0 , w ‘ (1) = 0 . (12)
Результаты вычислений при к = 1 . 3 п приведены в табл. 2.
Таблица 2
Результаты вычислений при k = 1 . 3 π для граничных условий шарнирного опирания
Table 2
Calculation results for k = 1 . 3 π for boundary conditions of the hinge support
|
ρ |
0 |
20 |
30 |
30 . 45 |
40 |
|
α 1 |
0 |
1 . 05 |
1 . 38 |
1 . 38 |
1 . 55 |
|
U 1 |
0 |
- 0 . 381 |
- 0 . 116 |
0 . 0089 |
1 . 05 |
|
w max |
0 |
0 . 297 |
0 . 353 |
0 . 373 |
0 . 358 |
|
α 2 |
1 . 93 |
2 . 12 |
2 . 30 |
2 . 325 |
2 . 56 |
|
U 2 |
- 11 . 9 |
- 8 . 79 |
- 8 . 39 |
- 8 . 45 |
- 9 . 07 |
|
w max |
0 . 403 |
0 . 396 |
0 . 38 |
0 . 373 |
0 . 358 |
Как и в случае жесткой заделки при q > 0 (не очень больших), найдется два решения уравнения (12) α 1 и α 2 , графики которых представлены на рис. 6 и 7 при к = 1 . 3 п, р = 30 .
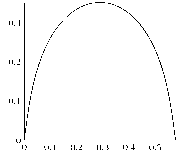
Рисунок 6. Упругая кривая {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, q = 30 , α 1 = 1 . 38 для граничных условий шарнирного опирания.
Figure 6. Elastic curve {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, q = 30 , α 1 = 1 . 38 for boundary conditions of the hinge support.
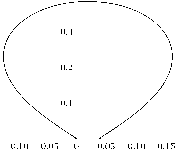
Рисунок 7. Упругая кривая {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, q = 30 , α 2 = 2 . 30 для граничных условий шарнирного опирания.
Figure 7. Elastic curve {z ( т ); w ( т ) }, т Е [0 , 1] , к = 1 . 3 п, q = 30 , α 2 = 2 . 30 for boundary conditions of the hinge support.
Таблица 3
Результаты вычислений при k = 1 . 1 π для граничных условий шарнирного опирания
Table 3
Calculation results for k = 1 . 1 π for boundary conditions of the hinge support
|
ρ |
0 |
2 |
2 . 5 |
3 . 0 |
4 . 0 |
|
α 1 |
0 |
0 . 408 |
. 5495 |
- |
- |
|
U 1 |
0 |
- 0 . 291 |
- 0 . 546 |
- |
- |
|
w max |
0 |
0 . 128 |
0 . 549 |
- |
- |
|
α 2 |
1 . 21 |
1 . 07 |
0 . 801 |
0 . 801 |
0 . 801 |
|
U 2 |
- 3 . 67 |
- 2 . 55 |
- 2 . 09 |
- 1 . 24 |
- 1 . 15 |
|
w max |
0 . 329 |
0 . 301 |
0 . 284 |
0 . 23 |
0 . 241 |
Результаты вычислений существенно зависят от величины продольной силы k. Для небольших значений k при увеличении поперечной нагрузки q первый корень α 1 исчезает (табл. 3). В частности, при к = 1 . 1 п, q > 3 остается только один корень уравнения (12). Если k достаточно велико, то начиная с некоторых q первому корню будет соответствовать положительное значение полной энергии. Например, при к = 1 . 3 п , р > 301 . 45 , что говорит о неусточивости такого положения равновесия. Поэтому на практике оно не реализуется.
Список литературы Влияние поперечной нагрузки на устойчивость сжимаемого продольной силой стержня
- Николаи, Е.Л. Труды по механике / Е.Л. Николаи. – Москва: Гостехиздат, 1955. – 583 с.
- Вольмир, А.С. Устойчивость деформируемых систем / А.С. Вольмир. – Москва: Наука, 1967. – 984 с.
- Перельмутер, А.В. Устойчивость равновесия конструкций и родственные проблемы / А.В. Перельмутер, В.И. Сливкер. – Москва: Издательство СКАД СОФТ, 2010–2011. – Т. 1. – 686 с.
- Феодосьев, В.И. Избранные задачи и вопросы по сопротивлению материалов / В.И. Феодосьев. – Москва: Наука, 1967. – 376 с.
- Келлер, Дж.Б. Теория ветвления и нелинейные задачи на собственные значения / Дж.Б. Келлер, С. Антман. – Москва: Мир, 1974. – 254 с.
- Тимошенко, С.П. Устойчивость упругих систем / С.П. Тимошенко. – Москва–Ленинград: Гостехиздат, 1946. – 531 с.
- Новожилов, В.В. Основы нелинейной теории упругости / В.В. Новожилов. – Москва: Гостехиздат, 1948. – 211 с.
- Алфутов, Н.А. Влияние односторонних связей на устойчивость цилиндрических оболочек при осевом сжатии / Н.А. Алфутов, А.Н. Еремичев // Расчеты на прочность. – Москва: Машиностроение, 1989. – С. 179–180.
- Тарасов, В.Н. Методы оптимизации в исследовании конструктивно-нелинейных задач механики упругих систем // В.Н. Тарасов. – Сыктывкар: Коми научный центр УрО РАН, 2013. – 238 с.
- Крепс, В.Л. О квадратичных формах неотрицательных на ортанте / В.Л. Крепс // Журнал выч. матем. и матем. физики. – 1984. – Т. 24, № 14. – С. 497–503.
- Рапопорт, Л.Б. Устойчивость по Ляпунову и знакоопределенность квадратичной формы на конусе / Л.Б. Рапопорт // Прикл. матем. и мех. – 1986. – Т. 50, вып. 4. – С. 674–679.
- Панагиотопулос, П. Неравенства в механике и их приложения. Выпуклые и невыпуклые функции энергии / П. Панагиотопулос. – Москва: Мир, 1989. – 494 с.
- Andryukova, V. Nonsmooth problem of stability for elastic rings / V. Andryukova, V. Tarasov // Abstracts of the Int. Conf. “Constructive Nonsmooth Analysis and Related Topics” dedicated to the memory of Professor V.F. Demyanov. Part I. – Saint-Petersburg: Institute of Electrical and Electronic Engineers, 2017. – P. 213–218.
- Tarasov, V. Nonsmooth problems in the mechanics of elastic systems / V. Tarasov // Abstracts of the Int. Conf. “Constructive Nonsmooth Analysis and Related Topics” dedicated to the memory of Professor V.F. Demyanov. Part I. – Saint-Petersburg: Institute of Electrical and Electronic Engineers, 2017. – P. 252–256.
