Влияние противоЭДС двигателя на колебания электромеханических систем

Автор: Пятибратов Георгий Яковлевич, Даньшина Анжела Александровна, Сухенко Николай Александрович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.15, 2015 года.
Бесплатный доступ
Повышение производительности и качества работы технологических установок с быстродействующими электроприводами требует комплексного решения задач проектирования современных электромеханических систем и комплексов. Сложность исследования современных электроприводов повышается при изменении параметров объектов управления, упругости и зазоров механических передач, сил трения и других факторов, усложняющих алгоритмы управления. Для повышения качества управления современными электромеханическими системами часто требуется более точный учет влияние противоЭДС двигателей на работу электроприводов. Выполнен анализ влияния противоЭДС двигателя на процессы в электроприводах с подчиненным регулированием координат. Обобщены результаты исследований влияния противоЭДС двигателя на работу электроприводов, имеющих абсолютно жесткие механические передачи. Определены условия и факторы, ухудшающие качество управления электроприводами из-за влияния противоЭДС двигателя при изменении управляющих и возмущающих воздействий. Исследовано влияние противоЭДС двигателя на колебания координат электромеханических систем с упругими механическими передачами. Определены условия и параметры регуляторов тока и скорости систем подчиненного регулирования, когда влияние противоЭДС двигателей на демпфирующую способность электроприводов в электромеханических системах с упругими связями можно не учитывать.
Электропривод, качество управления, противоэдс двигателя, упругость механических передач
Короткий адрес: https://sciup.org/147158434
IDR: 147158434 | УДК: 62:83.621.313 | DOI: 10.14529/power150208
The impact of counter-electromotive force of the motor on vibration damping processes in electromechanical systems
Comprehensive approach to the design of modern electromechanical systems and complexes is required to increase the efficiency and the quality of engineering units with high-speed electric drives. The complexity of studies of modern electric drives increases while changing the parameters of control objects, deflexion and clearances of mechanical transmissions, friction forces and other factors that complicate the control algorithms. To improve the quality of the control of modern electromechanical systems it is often required to perform more precise calculation of the impact of counter-electromotive forces of motors on the operation of electric drives. We analyzed the impact of the motor counter-electromotive forces on electric drives processes with subordinate coordinate control and summarized the results of studies concerning the impact of the motor counter-electromotive forces on the operation of electric drives with pure rigid mechanical transmissions. We also specified conditions and factors deteriorating the quality of electric drive control due to the impact of the motor counter-electromotive forces while changing the control and disturbance effects. We studied the impact of the motor counter-electromotive forces on the coordinate vibrations of the electromechanical systems with tough mechanical transmissions. The conditions and parameters of current and speed controllers of the subordinate control systems were specified when it is possible to neglect the impact of the motor counter-electromotive forces on the damping ability of electric drives in electromechanical systems with elastic coupling.
Текст научной статьи Влияние противоЭДС двигателя на колебания электромеханических систем
Актуальность проблемы
Повышение производительности и качества работы технологических установок требует интенсификации процессов управления, увеличения быстродействия их электроприводов (ЭП), что определяет необходимость комплексно решать задачи проектирования и реализации электромеханических систем (ЭМС). Сложность создания качественных ЭМС увеличивается при необходимости учета изменения параметров объектов управления, упругости механических передач, люфтов, сил трения и других факторов, ухудшающих качество управления такими системами. Поэтому для повышения эффективности управления технологическими установками и процессами требуется более точный учет свойств ЭМС, в том числе влияние противоЭДС двигателей на характеристики замкнутых систем.
Важность и сложность исследования влияния противоЭДС двигателей на работу ЭМС возрастает при оптимизации управления ЭП, имеющих упругие механические передачи [1, 2].
Постановка задачи исследований
ПротивоЭДС двигателей в разомкнутых системах ЭП является основным фактором стабилизации скорости двигателя при изменении нагрузки. Однако в замкнутых многоконтурных системах управления ЭП противоЭДС двигателей может оказывать как положительное, так и отрицательное воздействие на процессы регулирования тока и скорости электродвигателей. Анализ показал, что большое внимание получили исследования электромеханических систем (ЭМС) с учетом проти-воЭДС двигателей при широком применении систем подчиненного регулирования (СПР) координат ЭП [3, 4].
В настоящее время применение малоинерционных ЭП постоянного тока и быстродействующих приводов с двигателями переменного тока обусловило необходимость выполнения дополнительных исследований влияния противоЭДС двигателей. Исследования показали, что уменьшение моментов инерции двигателей и механизмов приводит к сближению значений электромагнитных и механических постоянных времени, что способствует повышению колебаний регулируемых координат, особенно при регулировании усилий в ЭМС, имеющих упругие механические передачи [1].
Исследования противоЭДС двигателей в ЭМС с упругими связями (ЭМС с УС) становится актуально при управлении усилиями в исполнительных механизмах различных рабочих машин [5]. Более точное определение влияния противоЭДС двигателей необходимо при исследовании в ЭМС с УС процессов демпфирования колебаний с помощью ЭП [6, 7], при реализации активного ограничения динамических нагрузок упругих механизмов [8, 9], при высокоточной стабилизации усилий в системах компенсации силы тяжести [10].
Для комплексного исследования влияния про-тивоЭДС двигателей на функционирование ЭП
Электромеханические системы необходимо использовать обобщенные математические модели [11] позволяющие учитывать свойства электродвигателей постоянного и переменного тока как в ЭП с абсолютно жесткими механическими передачами, и в ЭМС с упругими связями (УС).
Математическое описание исследуемой системы
Для исследования влияния противоЭДС двигателей на качество функционирования ЭП предлагается использовать математическое описание ЭМС позволяющее учитывать свойства как жестких, так и упругих механических передач. В настоящее время при исследовании сложных ЭМС с УС наиболее часто применяют двухмассовые расчетные модели, которые являются наиболее простыми и в тоже время позволяют учитывать основные особенности систем рассматриваемого класса.
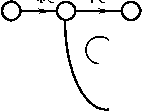
Линеаризованное математическое описание эквивалентной двухмассовой ЭМС с наиболее часто используемой в настоящее время двухконтурной СПР координат ЭП полученное в [11] представлено на рис. 1 в виде направленного графа Мэйсона [12], узлам которого соответствуют координаты исследуемой ЭМС.
Передачи ветвей графа ЭМС, записанные с использованием преобразования Лапласа, представлены в таблице.
Для возможности обобщения результатов и упрощения исследований математическое описание исследуемой системы целесообразно представить с применением относительных единиц. Для этого ток двигателя I, момент МУ в упругом элементе (УЭ), нагрузочный внешний момент MB будем определять в долях от базового номинального момента двигателя MH ; скорости вращения валов двигателя Од и механизма QM - в долях от базовой скорости идеального холостого хода двигателя Q0; напряжение преобразователя UП - в долях от базового номинального напряжения двигателя UH . Базовые значения задающего напряжения UЗ , напряжений на выходе регулятора скорости (РС) UPC и регулятора тока (РТ) UPT выберем так, чтобы коэффициенты передачи каналов обратных связей по току и скорости двигателя были равны единице.
Передачи ветвей графа на рис. 1 определяются следующими параметрами: k П , T П – коэффициент передачи и постоянная времени преобразователя, питающего электродвигатель, т - учитывает чистое запаздывание преобразователя; к Э = M КЗ / М н — коэффициент передачи двигателя, определяемый значением момента короткого замыкания М КЗ ЭП; Т Э = L Э / R Э - электромагнитная постоянная времени ЭП; Т д = J д ( Q 0/ М н ) и Т м = J м ( Q o/ М н ) - эквивалентные механические постоянные времени электродвигателя и механизма; J Д и J M – приведенные к валу двигателя моменты инерции масс, разделенных УЭ; Тс = (V с У )( М H /Q 0 ) - постоянная времени эквивалентной жесткости механической передачи; T d = Ь У / с У - постоянная времени, учитывающая диссипативные силы в УЭ; b У и c У – приведенные к валу двигателя коэффициенты внутреннего вязкого трения и жесткости механической передачи; k OT и T OT , k OC и T OC – коэффициенты передачи и постоянные времени цепей обратных связей, соответственно, по току и скорости двигателя.
В управляющей части ЭМС передача ветви РС F PC может быть представлена в виде FPC ( S ) = kPC в случае реализации однократно интегрирующей СПР или FPC ( S ) = kPC ( TPCS + 1 )/( TPCS ) при реализации двукратно интегрирующей системы. Свойства РТ учитываются ветвью графа F PT с переда-
U З
M В
F PC U PC F ФТ
F ЗИ
F ФС
U ЗИ
F 01
F

F 02
U PT F П
О
- F M
U П F
О д F
M У F
I
F
- F OT
- F OC
Q M
Рис. 1. Направленный граф исследуемой ЭМС
Передачи ветвей графа неизменяемой части ЭМС
|
Ветвь графа |
F П |
F Э |
F Д |
F У |
F M |
F OT |
F OC |
|
Передача ветви |
к п e ^Т S |
k Э |
k Д T Д S |
T d S + 1 |
k M T M S |
k OT |
k OC |
|
T n S + 1 |
ТЭ S + 1 |
T C S |
T OT S + 1 |
T oc S + 1 |
чей E PT ( S ) = к PT ( T PT S + 1 )/( T PT S ) . При настройке РС и РТ на симметричный оптимум для уменьшения колебаний координат ЭП в СПР предусмотрена возможность включения на входы РС и РТ фильтров с передачами Е фс ( S ) = к фс /( т фс S + 1 ) и Е ФТ ( S ) = к ФТ /( Т ФТ S + 1 ) . Для обеспечения требуемого темпа изменения скорости двигателя возможно включение на вход СПР задатчика интенсивности с передачей Е ЗИ ( S ) = 1/ ( Т ЗИ S ) .
Влияние противоЭДС двигателя на колебания в ЭМС с жесткими механическими передачами
При оценке влияния противоЭДС двигателя на процессы в ЭМС наибольший интерес представляет исследование изменения тока двигателя I. так как они определяет взаимодействия координат в ЭМС.
При исследовании влияния противоЭДС двигателя на динамику процессов в ЭП с абсолютно жесткими механическими передачами в направленном графе на рис. 1 надо исключить ветви учитывающие свойства упругих механических передач. Для этого необходимо принять передачи ветвей E y ( S ) = 0 и E M ( S ) = 0. В этом случае исследование влияния противоЭДС на ток двигателя при изменении задающего U З и возмущающего M B воздействий можно выполнить с использованием выражения:
I(S) = [RЗ1 (S) Uз (S) + Ед (S) Еэ(S)Mb (S)] х
х[У D ( S ) ] , (1)
где R З1 ( S ) = Е зи ( S ) Е фс ( S ) Е рс ( S ) Е фт ( S ) х х E PT ( S ) Е п ( S ) Е э ( S ) Е д ( S ) - операторная функция передачи ЭП с жесткими механическими передачами по задающему воздействию;
D 1 ( S ) = 1 + E 01 ( S ) + E 02 ( S ) + Е оз ( S ) - собственный оператор ЭМС с жесткими механическими передачами:
E o1 ( S ) = E pc ( S ) Е фт ( S ) Е рт ( S ) Е п ( S ) Е э ( S ) х х Е д ( S ) E OC ( S ) - петлевая передача учитывает свойства разомкнутого контура регулирования скорости (КРС) двигателя;
E 02 ( S ) = Е рт ( S ) Е п ( S ) Е э ( S ) Е от ( S ) - передача учитывает свойства условно разомкнутого контура регулирования тока (КРТ) двигателя в системе;
E 03 ( S ) = Е д ( S ) Е э ( S ) - передача учитывает влияние противоЭДС двигателя на процессы в исследуемой ЭМС.
С использованием выражения (1) оценим влияние противоЭДС двигателя на динамику процессов в ЭП с абсолютно жесткими механическими передачами.
Выполненные в [3] исследование показали, что не учет влияния противоЭДС двигателя приводит к уменьшению коэффициента передачи замкнутого КРТ, уменьшению его быстродействия и возрастанию перерегулирования переходного процесса изменения тока. Причем, влияние проти-воЭДС двигателя проявляется тем сильнее, чем меньше механическая постоянная времени привода Т Д и коэффициент относительного демпфирования двигателя С д = 0,5 [ Т д /( к Э Т Э ) ] 12 [4]. При указанных условиях влияние противоЭДС двигателя на качество работы ЭМС системы становится ощутимым и должно учитываться при настройке регуляторов СПР. При существенном влиянии противоЭДС двигателя на работу ЭП рекомендуется осуществлять ее компенсацию благодаря изменению параметров регуляторов или с помощью дополнительной положительной связи по скорости двигателя [13, 14].
Выполненные исследования показали, что в ЭП с абсолютно жесткими передачами противо-ЭДС может способствовать демпфированию колебаний скорости привода, если коэффициент усиления РС меньше, чем коэффициент передачи электродвигателя ( к PC < к Э) и полоса пропускания частот КРТ ю т < 1]Т Э . Однако на практике такое сочетание параметров ЭП встречается редко и, поэтому при синтезе СПР влияние противоЭДС обычно не учитывают. В общем случае влиянием противоЭДС двигателя в ЭП с абсолютно жесткими передачами можно пренебречь, если выполняется неравенство [ ( Т Д/ к Э ) + ( Т э/5 ) ] ^ 5 Т Ц .
Исследование влияния противоЭДС двигателя при резких изменениях нагрузочного момента M B , приложенного к валу ЭП, показало, что на изменение тока и скорости влияет в основном быстродействие КРТ и соотношение параметров k Э , Т Э , k PC . При низком быстродействии КРТ в ЭП с СПР, имеющем жесткие механические передачи, проти-воЭДС двигателя уменьшает колебания тока и скорости двигателя, вызванные изменением нагрузочного момента. Анализ процессов в СПР с учетом противоЭДС двигателя показал, что переходные процессы в ЭП становятся менее интенсивными, поэтому динамические характеристики привода при изменении возмущающего воздействия ухудшаются.
В общем случае при анализе и синтезе СПР ЭП имеющих абсолютно жесткие механические передачи, влиянием ЭДС двигателя на процессы в ЭМС обычно пренебрегают [4], что позволяет существенно упростить синтез регуляторов системы управления. Однако при создании качественных систем управления ЭМС влияние противоЭДС двигателя необходимо учитывать.
Влияние противоЭДС двигателя на демпфирующие свойства электропривода в ЭМС с УС
Исследование момента в УЭ механических передач при изменении задающих U З и возмущающих M B воздействий можно анализировать по выражению, полученному с помощью правила Мэйсона [12] для графа, приведенного на рис. 1:
MУ (5 ) = [RЗ (5) UЗ (5) + Rв (5) Mв (5)] x
x[V D ( 5 ) ] , (2)
где R З ( 5 ) = F 3 И ( 5 ) F oe ( 5 ) F PC ( 5 ) F 0 T ( 5 ) F PT ( 5 ) x x F n ( 5 ) /э ( 5 ) / Д ( 5 ) F y ( 5 ) - операторная функция передачи ЭМС с УС по задающему воздействию;
R в ( 5 ) = — F M ( 5 ) [ 1 + / ( 5 ) + F o 2 ( 5 ) + F 03 ( 5 ) ] -операторная функция передачи исследуемой ЭМС с УС по возмущающему воздействию;
D ( 5 ) = 1 + F 01 ( 5 ) + F 02 ( 5 ) + F 03 ( 5 ) + F 04 ( 5 ) x x[ 1 + F >2 ( 5 ) ] + F >5 ( 5 ) [ 1 + F 01 ( 5 ) + F 02 ( 5 ) + F 03 ( 5 ) ] -собственный оператор исследуемой ЭМС с УС.
F >4 ( 5 ) = F y ( 5 ) F ( 5 ) и F >5 ( 5 ) = F y ( 5 ) F m ( 5 ) -петли графа учитывают инерционные и упругодиссипативные свойства механической части системы.
В результате выполненных в работе [15] исследований показано, что при резких изменениях управляющего воздействия влияние противоЭДС двигателя в ЭМС с УС приводит к увеличению колебаний тока двигателя. Анализ переходных процессов в ЭМС с УС имеющей соотношение моментов инерции разделенных УЭ J д J M = 0,01 - 1,00 показал, что при настройке КРТ на модульный оптимум (МО) противоЭДС двигателя может увеличить перерегулирование тока якоря до 30 %, а время переходного процесса в 4–5 раз.
На практике большой интерес представляют исследования демпфирования ЭП колебаний момента в УЭ при изменении возмущающего воздействия. В этом случае необходимо рассматривать ЭМС с УС при соотношении моментов инерции J Д / J M > 1, когда собственная частота механической части системы ю У попадают в полосу частот to T пропускания замкнутого КРТ [16]. С использованием выражения (2) исследуем влияние про-тивоЭДС двигателя на динамические свойства ЭМС с УС и определим условия, при которых ЭДС двигателя способствует уменьшению колебаний механических передач.
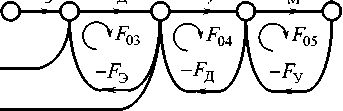
Для решения задачи исходный граф ЭМС с УС, приведенный на рис. 1, необходимо преобразовать так, чтобы получить отдельную ветвь, учитывающую влияние противоЭДС. На рис. 2 показан граф ЭМС с УС, позволяющий исследовать влияние противоЭДС двигателя на демпфирование
ЭП с СПР колебаний момента M УВ в УЭ механизма при изменении возмущающего воздействия M B .
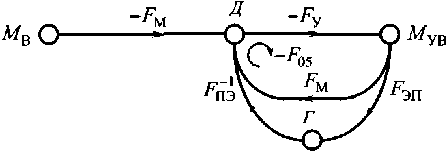
Рис. 2. Преобразованный граф ЭМС с УС
На рис. 2 ветвь графа с передачей
/ ЭП ( 5 ) =
_______ F KC ( 5 ) _______
FPC ( 5 ) FOT ( 5 ) FKT (5)
характеризует свойства ЭП без учета влияния про-тивоЭДС двигателя, а ветвь с передачей
Fra ( 5 ) =
1 + F kc ( 5 )
F pc ( 5 ) / фт ( 5 ) F p т ( 5 ) F n ( 5 )
учитывает влияние противоЭДС двигателя на процессы изменения момента в УЭ. Свойства замкнутого КРТ двигателя характеризует эквивалентная передача
F KT ( 5 ) =
F pt ( 5 ) F n ( 5 ) / э ( 5 ) 1 + F 02 ( 5 )
1 F 02 ( 5 )
------:—- •---------:—- . Fot (5) 1 + F02 (5)
а замкнутого КРС двигателя – передача
F KC ( 5 )
F pc ( 5 ) / фт ( 5 ) / Зт ( 5 ) / д ( 5 ) 1 + F 01 ( 5 )
1 F 01 ( 5 )
--------:—- 1------------: . F oc ( 5 ) 1 + F 01 ( 5 )
Исследование влияния противоЭДС на демпфирование ЭП колебаний момента в УЭ выполним, анализируя составную обратную передачу ветви /эПэ (5) = /ЭП (5) /ПЭ (5) графа ЭМС с УС, показанного на рис. 2:
F 3n3 ( 5 ) =
FPC ( 5 ) FOT ( 5 ) FKT ( 5 ) x FKC ( 5 )
x
1 +___________ F KC ( 5 ) ___________
Fpc (5) Fot (5) Fpt (5) Fn (5)
FPC (5) FOT ( 5 ) FKT (5) + FKT ( 5 )
Fkc (5) Fpt (5) Fn (5)
= / П ( 5 ) +
FKT ( 5 )
F pt ( 5 ) F n ( 5 ) .
Анализ передачи ветви
/эп (5) = Fpc (5) Fot (5) Fkt (5)/Fkc (5), учитывающей свойства ЭП без контура противо-ЭДС и передачи ветви /ЭПЭ (5) позволил опреде- лить условия, при которых влияние противоЭДС двигателя на демпфирование ЭП колебаний момента в УЭ МУВ будет наибольшим. Исследования, выполненные с использованием метода обратных частотных характеристик, изложенные в работе [11], показали, что противоЭДС двигателя будет улучшать демпфирующие свойства ЭП в ЭМС с УС, если в области резонансных частот механизма toP будет выполняться условие:
mod [ ^ ЭПЭ ( j ю)] < mod [ ^ эП ( j ю)] . (3)
Анализ показал, что при настройке КРТ и КРС двигателя на МО при приближении произведения
k
PT
k
PC к единице и выполнении дополнительного условия 1/
Т
РТ
Рассмотрим влияние противоЭДС двигателя на работу ЭП с СПР при найденных в работе [18] рациональных параметрах РС и РТ, обеспечивающих на резонансной частоте системы ( to P ) минимально возможное значение момента в УЭ М УВ ( to P ) . Исследование выполним в ЭМС с УС с параметрами неизменяемой части системы: Т П = 0,007 с; т = 0,003 с; к Э = 8,2; Т Э = 0,132 с; Т Д = 1,2 с; Т С = 0,0134 с; T d = 0,005 с; Т М = 0,38 с.
На рис. 3 и 4 приведены зависимости, показывающие влияние параметров регуляторов СПР на свойства ЭМС с УС. На рисунках сплошными линиями показано изменение момента в УЭ М ув ( to P ) при изменении возмущающего воздействия и учете влияния противоЭДС двигателя, а пунктиром – без ее учета, когда в математической модели ЭМС с УС петлевая передача F 03 графа на рис. 1 отсутствует.
На рис. 3 показано влияние на демпфирующие возможности ЭП изменения коэффициента усиления kРТ пропорционально-интегрального РТ с постоянной интегрирования ТРТ = ТЭ =0,132 с. Зависимости 1 получены при настройке пропорционального РС по общепринятым рекомендациям для ЭП с жесткими передачами, когда кРСЖ = 39,5 [4], зависимости 2 – при рекомендуемом в [18] рациональном значении кPCP = Тдtoy/V2 = 13,7, а зависимости 3 - при значении кPC = 7. Анализ показал, что влияние противоЭДС двигателя на демпфирование ЭП колебаний в ЭМС с УС возрастает при уменьшении kPT . Причем это влияние становится особенно заметно, когда kPT становится меньше рекомендуемого в [18] значения кРТР = = 2T TЭtoy /кЭ = 0,367. При значении kPC P про-тивоЭДС двигателя способствовало уменьшению резонансного значения момента в УЭ на 13 %.
На рис. 4 приведены зависимости, характеризующие демпфирование ЭП колебаний момента в УЭ М УВ ( to P ) при изменении коэффициента усиления пропорционального РС.
Зависимости 1 получены в ЭП с жесткими передачами при параметрах пропорциональноинтегрального РТ к РТЖ = 0,78, Т РТ = 0,132 с [4]; зависимости 2 – при настройке РТ в соответствии с рекомендациями, приведенными в [18], когда рациональные значения параметров РТ к РТР = 0,367, Т РТ = Т Э = 0,132 с обеспечивают минимальные значения момента в УЭ; зависимости 3 - при значениях к РТ = 0,13, Т РТ = 0,132 с.
Сопоставление зависимостей 2 показало, что учет влияния противоЭДС двигателя приводит к возрастанию резонансного значения момента в УЭ на 8 %. Анализ зависимостей 2 и 3 показал, что при параметрах к РС = 29,2, к РТ = 0,13, Т РТ = 0,132 с произошло уменьшение момента в УЭ на 19 %, однако для этого потребовалось уменьшить быстродействие КРТ.
Выполненные исследования показали, что
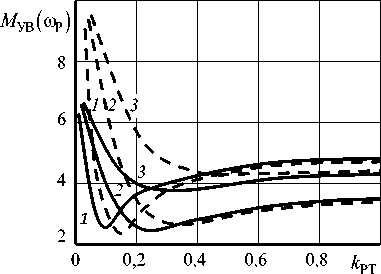
Рис. 3. Влияние противоЭДС двигателя и коэффициента усиления РТ на резонансные значения момента в УЭ
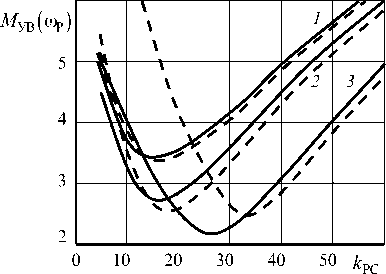
Рис. 4. Влияние противоЭДС двигателя и коэффициента усиления РС на резонансные значения момента в УЭ
при значении k PC = к РСР, обеспечивающем М УВ ( ю р ) = min, противоЭДС увеличивает демпфирующее действие ЭП, обеспечивая уменьшение амплитуды резонансных колебаний М УВ , однако при значении к PC > к РСР влияние противоЭДС двигателя приводит к повышению колебаний момента в УЭ механических передач.
Предложенные подходы к исследованию ЭМС и результаты выполненных исследований применены при создании и модернизации систем управления электроприводов технологических аппаратов химических производств [19–21], многосекционных стеклоформовочных машин [4, 22], тяговых приводов электроподвижного состава [23], копающих механизмов карьерных экскаваторов [24, 25], сбалансированных и грузоподъемных манипуляторов [2, 5, 6, 26, 27], стендов для отработки на Земле космической техники [28], тренажеров для подготовки космонавтов к работе в невесомости [29, 30]. Опыт наладки и эксплуатации ЭП показал, что учет и компенсация влияния противо-ЭДС двигателя на работу электроприводов позволяет улучшить качество управления ЭМС различных производственных механизмов.
Заключение
Выполненные исследования позволили сделать следующие выводы:
-
1. Влияние противоЭДС двигателя на работу ЭМС определяется в основном значениями электромагнитной и механической постоянных времени электропривода (ЭП).
-
2. В электроприводах с жесткими механическими передачами при малых значениях электромагнитной и механической постоянных времени двигателя и низком быстродействии контура регулирования тока противоЭДС двигателя уменьшает колебания тока и скорости двигателя, вызванные изменением нагрузочного момента.
-
3. В электромеханических системах с упругими связями (ЭМС с УС), имеющих инерционные механизмы при изменении управляющего воздействия противоЭДС двигателя увеличивает колебания тока двигателя.
-
4. При уменьшении быстродействия контура регулирования тока в ЭП с жесткими и гибкими механическими передачами влияние противоЭДС двигателя на работу систем подчиненного регулирования координат ЭМС возрастает.
-
5. При изменении возмущающего воздействия в ЭМС с УС, имеющих малоинерционные механизмы с уменьшением быстродействия контура тока способствует уменьшению максимальных значений усилий в упругих механических передачах на 15–20 %.
-
6. Учет влияния позволяет улучшить качество управления ЭМС с УС.
Результаты работы получены при поддержке проекта № 2878 «Развитие теории и практики создания электротехнических систем тренажерных комплексов и мобильных объектов», выполняемого в рамках базовой части государственного задания № 2014/143.
Список литературы Влияние противоЭДС двигателя на колебания электромеханических систем
- Пятибратов, Г.Я. Принципы построения и реализации систем управления усилиями в упругих передачах электромеханических комплексов/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -1998. -№ 5-6. -С. 73-83.
- Пятибратов, Г.Я. Создание и внедрение систем управления усилиями в упругих передачах и исполнительных устройства электромеханических комплексов/Г.Я. Пятибратов, О.А. Кравченко//Изв. вузов. Электромеханика. -2008. -№ 1. -С. 45-56.
- Гарнов, В.К. Унифицированные системы автоуправления электроприводом в металлургии/В.К. Гарнов, В.Б. Рабинович, Л.М. Вишневецкий. -М.: Металлургия, 1977. -192 с.
- Ремшин, Б.И. Проектирование и наладка систем подчиненного регулирования электроприводов/Б.И. Ремшин, Д.С. Ямпольский. -М.: Энергия, 1975. -182 с.
- Пятибратов, Г.Я. Реализация систем регулирования усилий электромеханических комплексов с упругими связями/Г.Я. Пятибратов, О.А. Кравченко, А.А. Денисов//Изв. вузов. Электромеханика. -1997. -№ 3. -С. 51-54.
- Пятибратов, Г.Я. Исследование электромеханических систем взаимосвязанных электроприводов многосекционных стеклоформовочных машин с учетом упругих связей и люфтов передач/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -1996. -№ 5-6. -С. 46-53.
- Пятибратов, Г.Я. Оптимизация пассивного демпфирования электроприводом упругих колебаний исполнительных органов сбалансированных манипуляторов/Г.Я. Пятибратов, И.В. Хасам¬биев//Изв. вузов. Электромеханика. -2007. -№ 3. -С. 29-34.
- Пятибратов, Г.Я. Возможности применения электроприводов для активного ограничения колебаний упругих механических передач/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -1990. -№ 10. -С. 89-93.
- Пятибратов, Г.Я. Активное демпфирование электроприводом упругих колебаний исполнительных механизмов сбалансированных манипуляторов/Г.Я. Пятибратов, И.В. Хасамбиев//Изв. вузов. Электромеханика. -2007. -№ 4. -С. 55-61.
- Принципы построения и реализации систем компенсации силы тяжести/О.А. Кравченко, Г.Я. Пятибратов, Н.А. Сухенко, А.Б. Бекин//Изв. вузов. Северо-Кавказ. регион. Техн. науки. -2013. -№ 2. -С. 32-35.
- Пятибратов, Г.Я. Методология комплексного исследования и проектирования электромеханических систем управления усилиями в упругих передачах механизмов/Г.Я. Пятибратов. -Новочеркасск: ЮРГТУ (НПИ), 1999. -154 с.
- Абрахамс, Дж. Анализ электрических цепей методом графов/Дж. Абрахамс, Дж. Каверли. -М.: Мир, 1967. -175 с.
- Бычков, В.П. Компенсация внутренней обратной связи двигателя постоянного тока в системах электропривода с подчиненным регулированием/В.П. Бычков, К.М. Вега//Электричество. -1970. -№ 11. -С. 36-38.
- Полищук, В.И. Системы подчиненного регулирования с компенсацией внутренней обратной связи по ЭДС двигателя/В.И. Полищук//Изв. вузов. Электромеханика. -1983. -№ 8. -С. 28-34.
- Шестаков, В.М. Влияние внутренней обратной связи по ЭДС двигателя на динамику систем подчиненного регулирования электроприводов с упругими механическими передачами/В.М. Шес¬таков//Электротехническая промышленность. Сер. Электропривод. -1974. -Вып. 6 (32).
- Пятибратов, Г.Я. Эффективность параметрических способов демпфирования упругих колебаний механизмов/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -2013. -№ 2. -С. 29-33.
- Пятибратов, Г.Я. Влияние противоЭДС двигателя на демпфирование электроприводом колебаний упругих механизмов/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -2001. -№ 3. -С. 53-59.
- Пятибратов, Г.Я. Оптимизация систем подчиненного регулирования электроприводов при учете упругости механических передач/Г.Я. Пятибратов//Изв. вузов. Электромеханика. -1986. -№ 6. -С. 72-82.
- Денисов, А.А. Опыт наладки и эксплуатации комплектных тиристорных электроприводов постоянного тока в условиях химпроизводств/А.А. Денисов, Г.Я. Пятибратов, В.И. Надтока//Промышленная энергетика. -1987. -№ 9. -С. 9-11.
- Пятибратов, Г.Я. Модернизация электропривода отжимного пресса, имеющего упругие механические передачи/Г.Я. Пятибратов, А.Н. Курочка. -Новочеркасск: НГТУ, 1997. -19 с. -Деп. в ВИНИТИ 25.08.97, № 2727-В97.
- Дебда, Д.Е. Проблемы модернизации электропривода вальцев при учете упругости механических передач/Д.Е. Дебда, Г.Я. Пятибратов. -Новочеркасск: ЮРГТУ(НПИ), 1999. -24 с. -Деп. в ВИНИТИ 30.12.99, № 3930-В99.
- Пятибратов, Г.Я. Модернизация основного электропривода многосекционных стеклоформовочных машин/Г.Я. Пятибратов, А.А. Денисов, В.Г. Ваганов//Автоматизация и современные технологии. -1994. -№ 4. -С. 4-6.
- Пятибратов, Г.Я. Система автоматического регулирования усилий тягового электропривода с компенсацией противоЭДС двигателя/Г.Я. Пятибратов, А.Г. Никитенко, О.А. Кравченко//Состояние и перспективы развития электроподвижного состава: тез. докл. II Междунар. конф. (4-6 июня 1997 г., Новочеркасск). -Новочеркасск, 1997. -С. 75-76.
- Левинтов, С.Д. Ограничение динамических нагрузок копающих механизмов карьерных экскаваторов/С.Д. Левинтов, Г.Я. Пятибратов, Б.В. Ольховиков//Изв. вузов. Горный журнал. -1980. -№ 7. -С. 100-104.
- Пятибратов, Г.Я. Повышение эффективности применения быстродействующих электроприводов копающих механизмов карьерных экскаваторов/Г.Я. Пятибратов, А.М. Борисов//Известия Тульского государственного университета. Сер. Технические науки. -Тула, 2010. -Вып. 3, ч. 3.-С. 138-144.
- Сухенко, Н.А. Совершенствование систем управления сбалансированных манипуляторов/Н.А. Сухенко, Г.Я. Пятибратов//Изв. вузов. Электромеханика. -2010. -№ 5. -С. 77-81.
- Пятибратов, Г.Я. Электромеханические силокомпенсирующие системы подъемно-транспортных манипуляторов/Г.Я. Пятибратов, Н.А. Сухенко//Вестник ЮУрГУ. Серия «Энергетика». -2014. -Т. 14, № 4. -С. 65-75.
- Состояние, проблемы и пути совершенствования систем имитации невесомости для наземной отработки изделий космической техники/Г.Я. Пятибратов, В.П. Папирняк, В.Г. Полежаев, А.И. Супчев//Изв. вузов. Северо-Кавказ. регион. Техн. науки. -1995. -№ 3-4. -С. 39-49.
- Кравченко, О.А. Создание и опыт эксплуатации силокомпенсирующих систем, обеспечивающих многофункциональную подготовку космонавтов к работе в невесомости/О.А. Кравченко, Г.Я. Пятибратов//Изв. вузов. Электромеханика. -2008. -№ 2. -С. 42-47.
- Принципы построения и реализации систем компенсации силы тяжести/О.А. Кравченко, Г.Я. Пятибратов, Н.А. Сухенко, А.Б. Бекин//Изв. вузов. Северо-Кавказ. регион. Техн. науки. -2013. -№ 2. -С. 32-35.
