Влияние сухого трения на устойчивость приборов с автоматическим уравновешиванием

Автор: Шамберов В.Н.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 3 т.14, 2004 года.
Бесплатный доступ
Рассматривается аналитическая задача настройки прибора на устойчивый режим при наличии сухого трения в его подвижной части.
Короткий адрес: https://sciup.org/14264350
IDR: 14264350 | УДК: 620.178.162:
Dry friction impact on the stability of automatic balance devices
An analytical task of stability adjustment of devices with dry friction elements is considered.
Текст научной статьи Влияние сухого трения на устойчивость приборов с автоматическим уравновешиванием
Сухое трение в подвижной части прибора не только определяет его нечувствительность к измеряемой величине, но также может вызывать автоколебательный режим, что часто является недопустимым при эксплуатации прибора. Влияние сухого трения на устойчивость прибора с уравновешиванием рассмотрим на примере прибора для измерения силы [1].
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ПРИБОРА
При построении математической модели прибора очень важно правильно учесть сухое трение в подвижной части прибора, что определяется целью исследования. Для рассматриваемого случая необходимо учитывать сухое трение при его некулоновской идеализации [2]. Структурно-функциональная схема типового прибора представлена на рис. 1.
Звено 1 преобразует разность сил f = f вх - f ос в перемещение x (см. рис. 1). Динамическая характеристика звена 1, преобразующего силу f в перемещение x , определяется способом крепления подвижной части. При закреплении подвижной части в подшипниках движение звена (с уче-
Рис. 1. Структурно-функциональная схема прибора том сухого трения) может быть представлено следующим описанием:
d2 x _ d x _ ы „
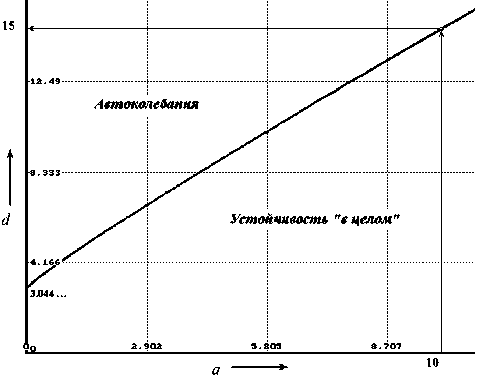
M-jT=0если 0 и f dt2d d2x dxd M —- + T — = f, если —^ 0 или(1) dt2 dtd если dx = 0 и И - FтP.0, dt где Md2 x /dt2 — даламберова сила (сила инерции); Tdx /dt — сила демпфирования; Ftp0 — сила трения покоя (сцепления), существующая до момента движения (страгивания) подвижной части прибора; M — масса подвижной части (н • с2 / м); T — коэффициент успокоения (н • с2 / м); x — перемещение подвижной части (м); f = fвх - fос — разность измеряемой и уравновешивающей сил ( н ). Звено 2 обычно включает в себя модулятор (преобразователь недокомпенсации с коэффициентом передачи Kпн), усилитель (с коэффициентом передачи Kус) и демодулятор (с коэффициентом передачи Kд). Пренебрегая инерционностью звена, можно считать, что u = Kx, где K = Kпн K ус Kд .(2) В приборе без корректирующих звеньев динамические свойства звена 3 определяются уравнением _ „ . , т d i„ d u = Ri + L--E —,(3) dtd где u — напряжение на входе звена (B); i — ток на выходе звена (A); R — активное сопротивление выходной цепи (Ом); L — индуктивность выходной цепи (Гн); E — электродвижущая сила, индуктируемая в обмотке обратного преобразова- теля при движении подвижной части (В). Звено 4, преобразующее ток i на выходе звена 3 (см. рис. 1) в уравновешивающую силу fос , является безынерционным и характеризуется коэффициентом передачи Kос . При проектировании приборов данного типа стремятся уменьшить параметр M (массу подвижной части прибора) по сравнению с параметром T (коэффициентом успокоения) и увеличить глубину уравновешивания Kос . Пренебрегая инерционными свойствами подвижной части прибора (M = 0) и используя в уравнениях (1)–(3) символ дифференцирования p = d / dt, динамику прибора можно охарактеризовать кусочно-линейной моделью [3] вида, представленного на рис. 2. Существенная нелинейность N ( f ) (см. рис. 2) определена учетом сухого трения в подвижном элементе прибора при пренебрежении его инерционными свойствами. Аналитическое описание нелинейности следующее N(f) = 0, если |f| < Fф.о и N(f) —= 0; N(f) = f, если N(f) - * 0 или (4) если N(f) — = 0 и |f| > Fтр.0. ВЛИЯНИЕ СУХОГО ТРЕНИЯ НА ВОЗНИКНОВЕНИЕ АВТОКОЛЕБАНИЙ Динамическая модель данного вида (см. рис. 2) была исследована методом точечных отображений на трехлистной фазовой плоскости [4]. Применительно к рассматриваемой задаче результаты исследования следующие. Динамическая модель устойчива "в целом" (при любых начальных условиях все движения притягиваются состояниями равновесия), если а) при (TR + KосE)2> 4TLKосK выполняется условие f А D — X \ A + 1 - D > (D - 1)exp|--ln----- ( A -1 D - A J б) при (TR + Kос E)2 < 4TLKосK выполняется условие 2 - D > > 7(1 - D)2+ Ai2 ехр A1 | arctg I 1 - D A1 +211 /J в) при (TR + KосE)2= 4TLKосK) — условие D < 1.782..., (7) где N(f) _ — предыстория состояния элемента с трением. где D = 1.782... определяется из выражения 2 - D = (D - 1)exp| D -1 В выражениях (5)–(7) обобщенные параметры A, A1, D определяются как A1 = - в / a, A = a1 / a, D = KосE / aLT. При этом в и а (при определении параметра A1 ) — соответственно мнимая и вещественная части комплексно-сопряженных корней Я1 2 = а ± je уравнения TL^ + + (TR + KосE)Л + KосK = 0; и а = Х1, а1 = Х2 (при определении параметра A) — вещественные корни (причем а > а1) этого же уравнения. При невыполнении любого из условий (5)–(7) сухое трение вызовет в модели автоколебания. В пространстве других параметров (a,d ) условия представлены на рис. 3, где a = KосE / TR ; d = = Kос (KL - ER)/TR2. Допустим, что исходные коэффициенты (за исключением коэффициента K ) определены так, что a = 10, d = 0.25K -10 = 15, тогда значение коэффициента K должно быть выбрано K < 100 (см. рис. 3). Условия (5)–(7) для принятой модели являются необходимыми и достаточными. При учете в законе сухого трения, помимо силы трения покоя (сцепления) также и силы трения движения (скольжения), условия являются достаточными. Рис. 3. Структура разбиения пространства параметров модели на области качественно различного динамического поведения Условия (5)–(7) сохраняются для любых значений Fтр.0 . ЗАКЛЮЧЕНИЕ Достаточно распространенное моделирование сухого трения в виде кулоновской идеализации (не учитывающей превышение сил трения покоя над силами трения движения) не позволяет выявить причину возникновения автоколебательных режимов. Решение задачи по влиянию сухого трения на возникновение автоколебательных режимов с помощью некулоновской идеализации можно осуществить аналитически, если допустимо пренебречь инерционными свойствами подвижного элемента прибора. Этот прием и продемонстрирован в статье.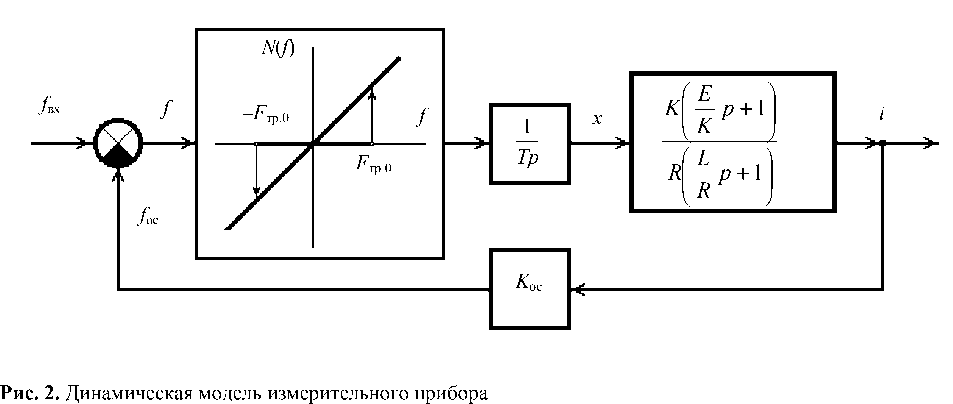
Список литературы Влияние сухого трения на устойчивость приборов с автоматическим уравновешиванием
- Туричин А.М. Электрические измерения неэлектрических величин (4-е издание)/Под общей ред. П.В. Новицкого. М.-Л.: Энергия, 1966. 690 с.
- Шамберов В.Н. Моделирование динамики элемента с трением//Фундаментальные и прикладные проблемы теории точности процессов, машин, приборов и систем: Труды 6-й сессии Международной научной школы (Фридлендеровские чтения). СПб.: Институт проблем машиноведения РАН, 2003. С. 98-105.
- Шамберов В.Н. Метод аналитического исследования влияния сухого трения на поведение авторегулируемых динамических систем//Научное приборостроение. 2003. Т. 13, № 3. С. 77-83.
- Шамберов В.Н. Исследование типовой промышленной системы автоматического регулирования с некулоновой моделью сухого трения. Автореф. дис. … канд. техн. наук. Л.: ЛГУ, 1988. 16 с.
