Влияние сухого трения в исполнительных механизмах автоматических систем с приводным электродвигателем на их устойчивость

Автор: Шамберов В.Н.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 4 т.14, 2004 года.
Бесплатный доступ
Рассматривается задача учета сухого трения в исполнительных механизмах приборных следящих систем с приводным электродвигателем и исследуется влияние сухого трения в исполнительном механизме на возникновение автоколебательных режимов.
Короткий адрес: https://sciup.org/14264359
IDR: 14264359 | УДК: 681.5.01:
Executive mechanisms' dry friction impact on the stability of automatic control systems with electric actuating motors
The problem of dry friction causing self-oscillation in automatic control systems with electric actuating motors is considered.
Текст научной статьи Влияние сухого трения в исполнительных механизмах автоматических систем с приводным электродвигателем на их устойчивость
Впервые электрическая машина для автоматического регулирования была применена в 1871 г. русским ученым-инженером В.Н. Чеколаевым. Новшество быстро нашло распространение в военной технике благодаря стараниям выдающегося русского артиллериста В.Ф. Петрушевского и талантливого изобретателя в области минного дела и артиллерии А.П. Давыдова. В настоящее время электрические машины широко используются в современных системах автоматического управления, автоматических устройствах и приборах.
В автоматических системах электрические машины часто используются в качестве исполнительных электродвигателей, преобразующих подводимый к ним электрический сигнал в угловую скорость вращения вала. С валом связан управляющий рабочий механизм, образующий с электродвигателем исполнительный механизм автоматической системы.
Присутствие сухого трения в исполнительном механизме может вызвать автоколебательный режим и привести к аварийной ситуации. Исследование явления требует создать в рамках сформулированной задачи идеализацию этого явления в виде определенной математической модели, допускающей возможность применения известных методов исследования.
МОДЕЛИРОВАНИЕ ДИНАМИКИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ПРИ УЧЕТЕ СУХОГО ТРЕНИЯ
Уравнение динамики исполнительного механизма с приводным электродвигателем получим из уравнения равновесия моментов (1) и уравнения электрического равновесия (2):
( c м i = J дв
I
+J jр J
dQ
-+ M
d t
вн.тр.
( Q ),
где приведенный к валу двигателя динамический момент обусловлен инерционностью ротора ( J дв ) и инерционностью связанного через редуктор ( j р — передаточное число редуктора) с валом двигателя рабочего механизма ( J м); c м i = М — вращающий момент двигателя; c м — коэффициент пропорциональности; М вн тр ( Q ) — приведенный к валу двигателя момент от сил внешнего трения; Q — угловая скорость вращения вала;
L d i + Ri + c Q = U , d t е
где i — ток якоря; L — суммарная индуктивность; R — суммарное активное сопротивление; c е Q — противо-ЭДС двигателя; c е — скоростной коэффициент двигателя.
Момент от сил внешнего трения М вн тр ( Q ) представляет собой сумму двух моментов: от сил вязкого трения М втр ( Q ) = к т Q ( к т — положи -тельный коэффициент, характеризующий вязкое трение) и от сил сухого трения М с тр ( Q )
М вн.тр. = М b.tp. ( Q ) + М c.tp. ( Q ).
Для М с тр ( Q ) выполняется:
|М с лр,| < М тр.0 , если Q = 0;
М ср. = М ( Q ) сЛр^в. Sign( Q ), если Q ^ 0,
где М тр.0 — момент сил трения покоя, а М ( Q ) стрдв — момент сил сухого трения движения.
Так что для момента сил внешнего трения справедливо
|М вн.тр.| < М тр.0 , если Q = °;
М вн.тр. = к т Q + М ( Q )СЛ1МП, Sign( Q ), (3)
если Q ^ 0.
Момент сил сухого трения движения — монотонно убывающая положительная функция, характеризуемая:
своим максимальным значением
М(Q)с.тр.дв. ^ Мтр.ост. при QH 0 , минимальным значением
М (Q) с.тр.дв. ^ Мтр.тт при |^Н “ , максимально отрицательным наклоном kТ = -(4(М (Q) 1 dQ| .
При этом М тр.о > М тр.ост. > М тр.т. > 0 [1, 2].
Долгое время практика моделирования сухого трения в исполнительных механизмах ориентировалась на его простейшую идеализацию М тр.о = М тр.ост. = М тр.тт > 0 , полУчившУю название кулоновской. Качественной особенностью некулоновских идеализаций является учет превышения сил трения покоя над силами трения движения: М тр.0 > М тр.ост. = М тр.тт > 0 — Учет сУХого трения по Булгакову; М тр.0 = М тр.ост > М тр mn > 0 — учет сухого трения по Хайкину; М тр 0 > М тр ост > > М тр min > 0 — уточненный учет сухого трения.
По уравнениям (1–3) получим следующую модель исполнительного механизма:
L d i = - Ri - c e Q + U ;
d t е
J ^ = 0, если Q = 0 и| c M i |< M 0;
d t
J d Q = - к т Q - M ( Q ) с .т РДВ , Sign( Q ) + c м i ,
если Q ^ 0;
J dz" = - k т Q - M ( Q ) с.тр.Дв. Sign c м i ) + c м i ’ если Q = 0 и| c м i |> M тр.0 ,
Здесь J — приведенный к валу двигателя момент всех вращающихся масс. Коэффициенты с м , с е могут быть определены по механическим характеристикам двигателя. При М тр 0 > М тр ост модель (4) относится к моделям логико-динамического класса. Переменными состояния являются угловая скорость вращения вала Q = d 0 / d t , угол поворота 0 и ток в обмотке якоря i , внешним воздействием — подводимое к якорю двигателя напряжение U .
Использование модели (4) сопряжено с существенными трудностями при аналитическом исследовании. Однако практика моделирования динамики автоматических систем с исполнительными двигателями малой мощности часто допускает пренебрежение моментом инерции ( J = 0), что позволяет применить вырожденную модель [3] исполнительного механизма в классе кусочнолинейных моделей (представлена на рис. 1 в операторном виде: p = d / d t — символ дифференцирования по времени). Коэффициент k в модели характеризует трение движения. Сухое трение учтено с помощью существенной нелинейности N ( M ) . Нелинейность соответствует учету сухого трения при М тр.0 > М тр.ост. > М тр.mi n > 0 и k т > k т .
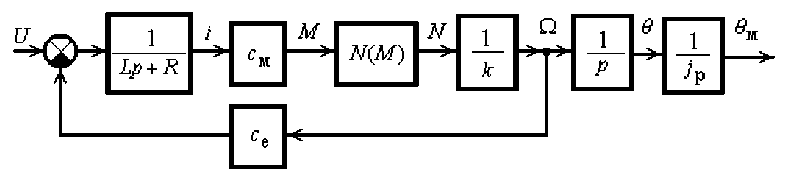
Рис. 1. Математическая модель исполнительного механизма с электроприводом
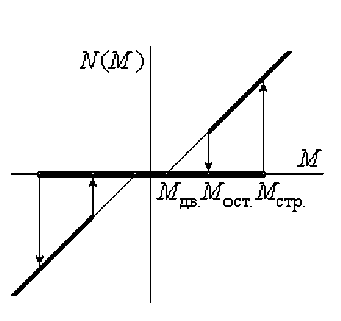
Рис. 2. Существенная нелинейность, определяющая учет сухого трения в исполнительном механизме при J = 0 и к т > к т
Здесь обозначены: M стр — страгивающий момент двигателя; M ост — остановочный момент; M дв — момент сил сухого трения при движении; N 0— предыстория состояния нелинейности N ( M ).
Геометрическая интерпретация нелинейности представлена на рис. 2.
Значения M стр. = c м i стр. , M ост. = c м i ост. могут определяться экспериментально путем замера токов якоря, при одном из которых подвижная часть механизма приходит в движение ( i стр ) и при другом — останавливается ( i ост ) соответственно. Фрикционные колебания в модели (представлены на рис. 3) будут наблюдаться при выполнении условия
c е c м kR
+1 >
M стр.
M ост.
Аналитическое описание нелинейности:
если M\ < M ост . , то N = 0;
если |M| < Mстр. и |М| > Mост. и Nо = 0, то N = 0;
если M > Mn„T и Nn * 0 или ост.0
если M > Mстр. и N0 = 0, то N = M - Мли;
дв. ’ если M < -Мп„ и Nn * 0 или ост.0
если M < -M и N = 0, стр.0
то N = M + М„„ .
дв.
для внешнего воздействия U из диапазона
R M стр. < U < M ост. R c е c м c м c м ( Rk
+ 1
)
Фрикционные колебания — быстрые скачкообразные перемещения, чередующиеся с остановками подвижной части исполнительного механизма, наблюдаются в модели механизма только при к т > к т.
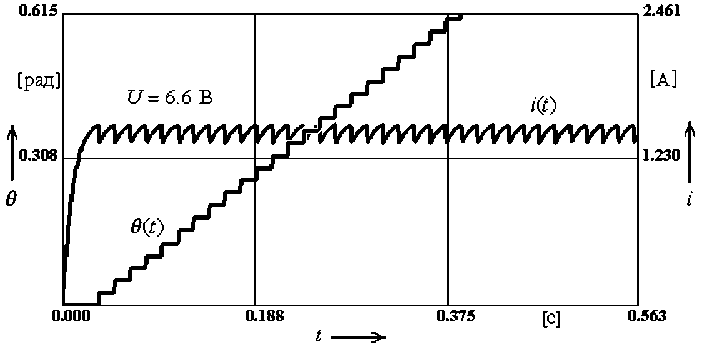
Рис. 3. Фрикционные колебания исполнительного механизма. Параметры системы: c е = 0.2 В^с/рад, c м = 1.0 Н^м/А, к = 0.1 Н^с/рад, R = 3.0 Ом, L = 0.032 Гн, M стр. = 4.00 Н^м, M ост. = 3.65 Н^м, M дв. = 0.00 Н^м
U

у
Модель исп. механизма по рис. 1
^м
Рис. 4. Математическая модель следящей системы с электроприводом
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ АВТОМАТИЧЕСКИХ СИСТЕМ С СУХИМ ТРЕНИЕМ В ИСПОЛНИТЕЛЬНОМ МЕХАНИЗМЕ
Рассмотрим некоторые примеры влияния сухого трения в исполнительных механизмах электрических следящих автоматических систем на возникновение в них автоколебаний. Простейшая следящая система с приводным электродвигателем и безынерционным усилителем с коэффициентом передачи К у [4] представлена на рис. 4.
Аналитическое описание нелинейности, учитывающей сухое трение:
Если \M\ < M дв . , то N = 0;
если |M| < Mстр. и |М| > Mдв. и Nо = 0, то N = 0;
если M > М„ и Na ^ 0 или дв. 0
если M > M стр . и N 0 = 0,
то N = M - М„„;
дв.
если M < - М„. и Na ^ 0 или дв. 0
если M < -Mстр. и N0 = 0, то N = M + Млв.
дв.
Геометрическая интерпретация нелинейности представлена на рис. 5.
Нелинейность учитывает сухое трение при М тр.0 > М тр.ост. > М тр mn > 0 , k т < k т и имеет качественные отличия от нелинейности (см. рис. 3), учитывающей сухое трение при к т > к т. При такой нелинейности (см. рис. 5) исполнительный механизм не генерирует фрикционные колебания, однако в самой автоматической системе сухое трение может вызвать автоколебания.
В режиме свободных движений динамика автоматической системы будет соответствовать модели
U + g 1 U = - d 1 N (U ) - d 2 N (U ). (6)
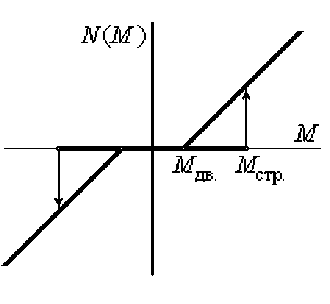
Рис. 5. Существенная нелинейность, определяющая учет сухого трения в исполнительном механизме при
J = 0 и к т < к т
Динамическая модель (6) была исследована методом точечных отображений [5, 6]. Результаты исследования: модель устойчива "в целом", если выполняются условия:
а) при ( g 1 + d 1 ) 2 > 4 d 2
( A + 1 - D ) Q > ( D - 1) exp f- - A - In D -l ) ; (7)
I A - 1 D - A J
б) при ( g 1 + d 1 ) 2 < 4 d 2
(2 - D ) Q >
V(1 - D )2 + A 2 ехр
A 1
( 1 - D arctg——
A
в) при ( g 1 + d 1 ) 2 = 4 d 2
+ n ]
J
(2 - D ) Q > ( D - 1)exP
D - 1 J
В выражениях (7–9) обобщенные параметры A > 1; A1 > 0; D, Q > 1 определяются как A1 = - в / a, A = a1/ a, D = - d 1 / a. При этом в и а (при определении параметра A1) — соответст- венно мнимая и вещественная части комплексносопряженных корней Х12 = а ± je уравнения Я2 + (g 1 + d 1)Я + d2 = 0, а а = Я1 и а1 = Х2 (при определении A ) — вещественные корни (причем а > а1) этого же уравнения. Качественный учет сухого трения характеризует обобщенный параметр Q = (Mс1р. + Mдв.)/(MсТр. - Mдв.): с увеличением Q область устойчивости расширяется. Структура разбиения пространства в соответствии с условиями (7–9) на области устойчивости и области автоколебаний представлена на рис. 6 (значение параметра Q зафиксировано).
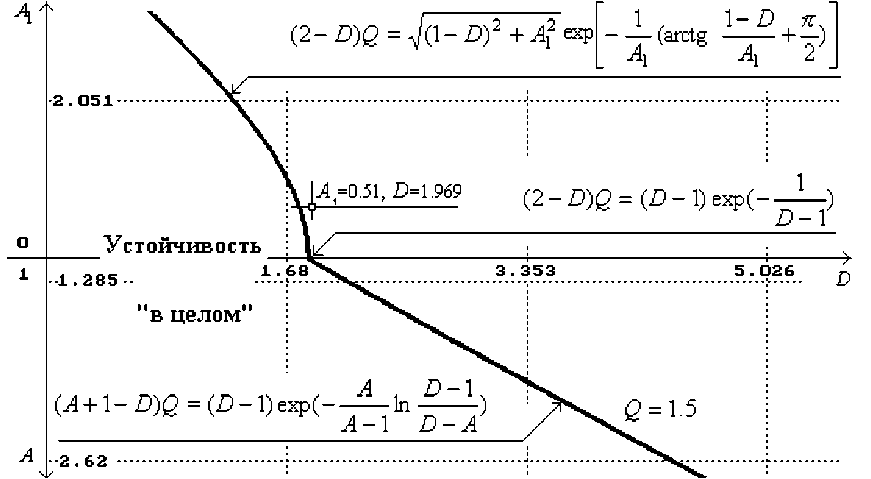
Рис. 6. Структура разбиения пространства обобщенных параметров A , A 1 , D, Q на области устойчивости и автоколебаний
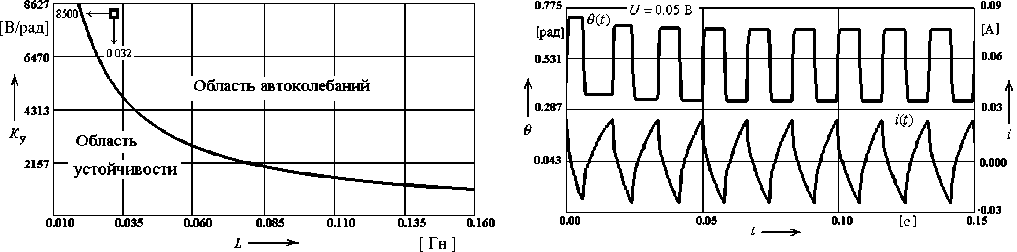
Рис. 8. Автоколебания в следящей автоматической системе с параметрами:
c e = 0.2 В^с/рад, с м = 1.0 Н^м/А, к = 0.01 Н-м-с/рад, R = 3.2 Ом, L = 0.032 Гн, М стр. = 1.00 Н^м, М ост. = = 0.25 Н^м, K у = 8500 В/рад
Рис. 7. Структура разбиения пространства исходных параметров (коэффициентов) на области устойчивости и автоколебаний при константных значениях:
R = 3.0 Ом, к = 0.01 Н-м-с/рад, c e = 0.2 В^с/рад, с м = = 1.0 Н-м/А, М стр. = 1.00 Н^м, М ост. = 0.25 Н^м
Невыполнение любого из условий (7-9) вызовет в модели автоколебания. Параметры обобщенной модели (6) определяются через исходные коэффициенты системы согласно выражениям: d 1 = c е c м / L k ; d 2 = K у c м / Lkj р ; g 1 = R / L . Структуру разбиения можно представить и в исходных параметрах (коэффициентах), например на плоскости K у и L при фиксированных остальных параметрах (представлено на рис. 7).
Зададим параметрам Ky, L значения из облас ти существования автоколебаний K у = 8500, L = 0.032 (см. рис. 7), или А1 = 0.51, D = 1.969 (см. рис. 6). При начальных условиях, соответствующих области притяжения предельного цикла, в системе возникают автоколебания (представлены на рис. 8).
Рассмотрим пример [4] следящей системы, в которой используется пассивное дифференцирующее звено (рис. 9) с параметрами T 1 и T , при T > T 2 .
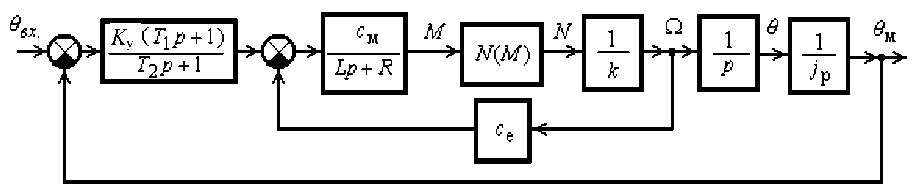
Рис. 9. Математическая модель следящей системы с пассивным дифференцирующим звеном
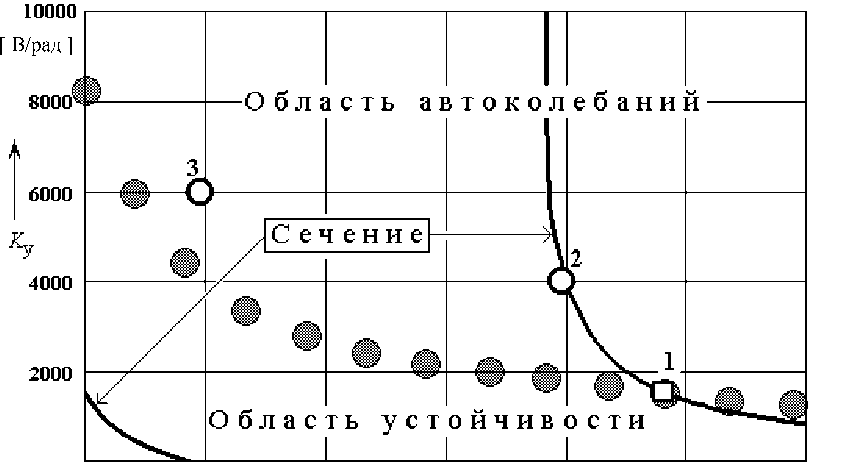
Рис. 10. Структура разбиения пространства исходных параметров следящей системы с дифференцирующим звеном на области устойчивости и автоколебаний
[ Гн ]
Следящая система с дифференцирующим звеном в отличие от системы рис. 4 является моделью 3-го порядка, однако и к ней (при L ^ RT 2 ) можно применить условия (7–9), определяющие ее устойчивость для определенного соотношения (сечения) ее параметров.
В соответствии с методом сечений пространства параметров [7, 8], для системы рис. 9 можно получить одно сечение, которое определяется уравнением
K y
Rc e i p ( L - RT 2 ) L ( L - RT 1 )
.
На плоскости параметров Kу , L сечение вы- глядит в виде двух линий (рис. 10). При выполнении равенства (10) условия устойчивости автоматической следящей системы 3-го порядка совпадают с условиями устойчивости системы 2-го порядка, для которой g 1 = 1/ T2, d 1 = cе cм / Lk, d2 = Kуcм / RkjрT2. Применение метода показало, что для точек сечения при L < RT2 система (6) всегда устойчива, для точек сечения при L > RT1 условия устойчивости (отсутствия автоколебаний) — L > 0.1267.., Kу < 1552 (квадратная точка 1, см. рис. 10).
Остальные точки граничной линии (овальные заштрихованные на рис. 10) получены методом машинного моделирования. Граничная линия раз- деляет плоскость параметров Kу , L на область устойчивости и область автоколебаний (графики автоколебаний для точек 2 и 3 сходны с графиком рис. 8).
ЗАКЛЮЧЕНИЕ
Исследование влияния сухого трения в исполнительном механизме приборной следящей системы осуществлено в результате сочетания методов: теории релаксационных (разрывных) колебаний, сечений пространства параметров, точечных отображений и численного интегрирования уравнений динамической модели, что вполне соответствует новой технологии научного познания — совместному использованию строгого анализа и численной машинной математики.
Список литературы Влияние сухого трения в исполнительных механизмах автоматических систем с приводным электродвигателем на их устойчивость
- Шамберов В.Н. Моделирование динамики элемента с трением//Фундаментальные и прикладные проблемы теории точности процессов, машин, приборов и систем: Труды 6-й сессии Международной научной школы (Фридлендеровские чтения). СПб.: Институт проблем машиноведения РАН, 2003. С. 98-105.
- Шамберов В.Н. Метод аналитического исследования влияния сухого трения на поведение авторегулируемых динамических систем//Научное приборостроение. 2003. т. 13, № 3. с. 77-83.
- Мищенко Е.Ф., Розов Н.Х. Дифференциальные уравнения с малым параметром и релаксационные колебания. М.: Наука, 1975. 248 с.
- Васильев Д.В., Чуич В.Г. Системы автоматического управления (примеры расчета). М.: Высшая школа, 1967. 419 с.
- Шамберов В.Н. Исследование типовой промышленной системы автоматического регулирования с некулоновой моделью сухого трения. Автореф. дис. … канд. техн. наук. Л.: ЛГУ, 1988. 16 с.
- Камачкин А.М., Шамберов В.Н. Существенно нелинейные автоматические системы. СПб.: Изд. центр СПбГМТУ, 1995. 74 с.
- Нелепин Р.А. Об исследовании методом сечений пространства параметров одного класса систем управления//Изв. АН СССР, Техническая кибернетика. 1965. № 4. С. 126-133.
- Нелепин Р.А., Камачкин А.М., Туркин И.И., Шамберов В.Н. Алгоритмический синтез нелинейных систем управления/Под ред. Р.А. Нелепина. Л.: ЛГУ, 1990. 240 с.
