Влияние взаимного расположения приемников ГНСС на точность определения углового положения летательного аппарата на этапе посадки

Автор: Лысов С.С., Дударев Н.В.
Рубрика: Управление в технических системах
Статья в выпуске: 1 т.26, 2026 года.
Бесплатный доступ
Полетные миссии требуют высокой точности управления аппаратом, особенно на этапах взлета и посадки. Это во многом относится к рассмотрению влияния размещения антенн ГНСС на цилиндрическом корпусе ЛА и связанной с этим точности определения углового положения, что критически важно для успешного выполнения миссии. Цель работы: повышение точности определения углового положения (крена, тангажа и рыскания) летательного аппарата на критичных этапах полета, таких как посадка, за счет оптимизации взаимного расположения антенн спутниковой навигационной системы на его цилиндрическом корпусе. Исследование направлено на минимизацию влияния шума измерений координат на результирующую ошибку вычисления углов ориентации. Материалы и методы. Для решения задачи оптимизации применялись и сравнивались два алгоритма: «жадный» алгоритм, направленный на выбор максимально удаленных друг от друга точек размещения, и RANSAC-алгоритм, основанный на устойчивой выборке случайных подмножеств. Критерием оптимизации служила минимизация стандартного отклонения ошибки определения углов Эйлера. Эффективность полученных конфигураций оценивалась методом статистического моделирования со 100 итерациями для различных уровней шума координат. Зависимость ошибки ориентации от ошибки позиционирования анализировалась с помощью линейной регрессии и коэффициента детерминации. Проведено сравнение коэффициентов передачи шума с теоретической оценкой для неоптимизированного размещения. Результаты. Проведено сравнение «жадного» алгоритма оптимизации размещения антенн приемников ГНСС и RANSAC-алгоритма. Найдена наилучшая конфигурация, обеспечивающая снижение коэффициента передачи по сравнению с теоретической оценкой. Выявлена близкая к линейной зависимость ошибки определения углов от ошибки измерения координат. Заключение. Показана важность оптимизации взаимного расположения приемников для точного определения ориентации летательного аппарата. Наиболее эффективным и надежным методом для размещения приемников на цилиндрическом корпусе признан «жадный» алгоритм. Его применение позволяет существенно повысить точность определения углового положения на этапах полета, чувствительных к ошибкам ориентации, таких как взлет и посадка. Результаты работы формируют практические рекомендации для повышения надежности систем ориентации.
Радионавигация, угловое положение, глобальные навигационные спутниковые системы, летательный аппарат, алгоритмы оптимизации, посадка, шум измерений
Короткий адрес: https://sciup.org/147253156
IDR: 147253156 | УДК: 621.391:621.396 | DOI: 10.14529/ctcr260105
The effect of the relative position of the GNSS receivers on the accuracy of determining the angular position of the aircraft at the landing stage
Flight missions require high precision control of the vehicle, especially during the takeoff and landing stages. This largely relates to the consideration of the influence of the placement of GNSS antennas on the cylindrical body of the aircraft and the associated accuracy of determining the angular position, which is critically important for the successful completion of the mission. The purpose of the work. Impro¬ving the accuracy of determining the angular position (roll, pitch and yaw) of an aircraft at critical stages of flight, such as landing, by optimizing the relative position of the satellite navigation system antennas on its cylindrical body. The research is aimed at minimizing the effect of coordinate measurement noise on the resulting error in calculating orientation angles. Materials and methods. To solve the optimization problem, two algorithms were used and compared: a “greedy” algorithm aimed at selecting the most distant placement points from each other, and a RANSAC algorithm based on a stable sample of random subsets. The optimization criterion was the minimization of the standard deviation of the error in determining the Euler angles. The effectiveness of the obtained configurations was evaluated by statistical modeling with 100 iterations for various levels of coordinate noise. The dependence of the orientation error on the positioning error was analyzed using linear regression and the coefficient of determination. The noise transmission coefficients are compared with the theoretical estimate for an unoptimized placement. Results. A comparison is made between the “greedy” algorithm for optimizing the placement of GNSS receiver antennas and the RANSAC algorithm. The best configuration has been found, providing a reduction in the transmission coefficient compared to the theoretical estimate. A close to linear dependence of the error in determi-ning angles on the error in measuring coordinates has been revealed. Conclusion. The importance of optimizing the relative position of the receivers for accurately determining the orientation of the aircraft is shown. The “greedy” algorithm is recognized as the most effective and reliable method for placing receivers on a cylindrical body. Its use makes it possible to significantly improve the accuracy of determining the angular position at flight stages sensitive to orientation errors, such as takeoff and landing. The results of the work form practical recommendations for improving the reliability of orientation systems.
Текст научной статьи Влияние взаимного расположения приемников ГНСС на точность определения углового положения летательного аппарата на этапе посадки
Современные аэрокосмические задачи предъявляют исключительно высокие требования к точности и надежности управления полетом. Ключевым аспектом их успешного решения является непрерывный и высокоточный мониторинг параметров движения аппарата. В частности, наибольшее внимание к отслеживанию и мониторингу состояния летательного аппарата (ЛА) требуется на этапах взлета и посадки. Наряду с определением местоположения критически важным становится знание углового положения (ориентации) ЛА в пространстве, описываемого углами крена, тангажа и рыскания. Точность определения этих параметров напрямую влияет на эффективность работы системы управления, корректность выполнения маневров, расход топлива и, в конечном счете, на успех всей миссии [1, 2].
Основ н ым и н с труме н т ом д ля решения навигационных задач на этапах взлет а и п осад к и я в л яе т с я г лобальн а я на в и г а ц и он ная спутниковая система (ГНСС). Однако ст а н д ар тн ые Г НС С-приемники п ре дос т а вля ю т д а н н ы е исключительно о координатах и скорости с во е й а н те н н ы, чт о н едос та т очн о д ля п о лн оце н н ого определения ориентации объекта. Для получе н и я и н фо р м а ц и и об у г ловом п о лож е н и и п ри м е н яют с я фу н к ц и он ал ьн ые д оп о лне н и я, а и ме н н о – алгоритмы простран ств ен ного кин ем а ти че ск о го п ози ционирования, использующие данные с неско ль к и х а н те н н , ж е стко з ак ре пле н н ых н а ко рп у се л етательного аппарата. Взаимное расположен и е э ти х а н те н н фор ми р уе т т а к н а зы в ае мы е ба зы, а н а ли з ра зн ос ти ф а з с и гн ал ов и ли и х квазидальностей на которых п озво ляе т с в ысок ой точнос тью вы чи с ли т ь у г лы ор и е н т а ц и и ап п а р а т а .
Точн ос т ь опре де л е н и я у глового положения оказывается в прямой зависи мос ти о т д ву х ос н ов н ых фак т ор ов : у ров н я ш умов измерений координат самими приемниками и г е оме т ри че с к ог о фактора – вза и мн о го расп о ло ж е ния этих приемников на конструкции ракеты-носителя [3]. Дан н ое и с сле д ова н и е п ос вя щ е н о а н ализу второго фактора. В работе моделируе т с я вли ян и е ра злич н ы х кон фигурац ий ра з м еще н и я антенн ГНСС на цилиндрическом корпусе рак еты-носителя на итог ову ю точн ос ть оц е н ива н и я е е углов Эйлера, что является критически ва жн ым для обес пе ч е н и я н а д ежн ого кон т ро ля н а э т ап а х взлета и посадки летательных аппаратов [4 ] .
Моделирование расположения приемников ГНСС на борту ЛА
Т е л о ЛА, на кот ором мож н о разме ст и ть приемники ГНСС, в приближении можно рассматри ва ть ка к ц и ли н д р. В озьм ем в ка ч естве примера цилиндр радиуса 275 см и длин ы 3000 с м.
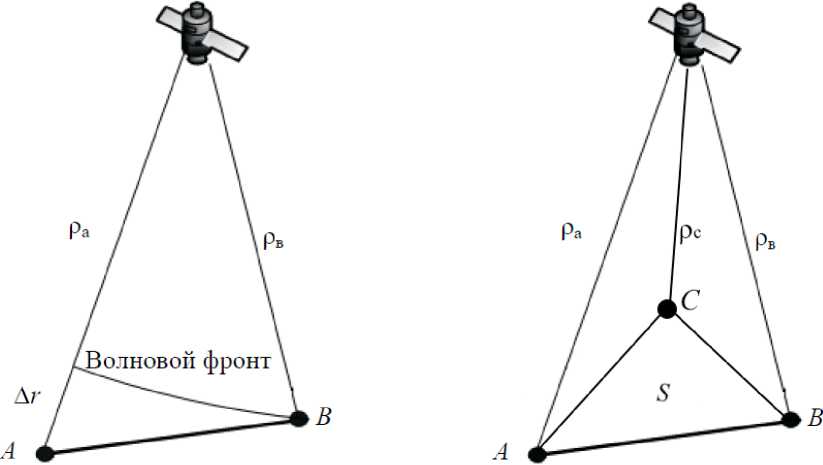
На б ор т у ЛА н е о б х о д и м о расположить 3 приемника ГНСС в заранее оп р ед е л е н н ых т оч ка х та к и м обра з ом , чт обы р ас с т ояни е меж д у лю быми двумя соседними приемниками ГНСС, назы вае мо е б а з ой , б ы ло бо ль ш е с р еднеквадратичного отклонения (СКО) измерен и й п о все м т ре х к о о рдин а та м, и п ри э т о м три п ри емника не должны находиться на одной лин и и ( ри с . 1а , b) [5]. В примерах на рис. 1 прием н и к и A , B , C образуют базы AB , BC , CA и векторную плоскость S .
a) b)
Рис. 1. Базы приемников: а – база двух приемников; b – базы трех приемников Fig. 1. Axis of receivers: a – axis of two receivers; b – axis of three receivers
Тог да необ х о д и мо п о д о бра ть б а зы трех приемников таким образом, чтобы они давали наи мень ш у ю п огр е ш н ос ть в оп ред е лении угловых положений ЛА, то есть углов Э й ле р а [ 6 ] . Д ля э то го не обх о д и м о п ри ме н и т ь ал горитмы оптимизации размещения приемников Г НС С н а п ове рхн о сти те ла ЛА с к ри тери е м оп ти миза ции – наименьшее влияние шума определения координат на шум определения углов Эйлера:
О ф, у ,е = f(G x,y,z ) ^ min, (1)
где оф ,у,0 - СКО шума определения углов Эйлера ЛА; ox y z - СКО шума определения координат приемников ГНСС в системе координат ENU: East – Восток (координата x ), North – Север (координата y ), Up – Верх (координата z ).
Были применены два алгоритма: «жадный» алгоритм и RANSAC-алгоритм. В результате были подобраны по три точки на теле ЛА, где будет наилучшим образом выполняться критерий (1).
Описание «жадного» алгоритма [7, 8] .
Требуется выбрать три неколлинеарные опорные точки, максимально удаленные друг от друга. Алгоритмические шаги:
-
1. Выбор первой точки A . Берется точка с минимальной координатой x :
-
2. Выбор второй точки B . Берется наиболее удаленная от первой точки A точка:
-
3. Выбор третьей точки C . Выбирается точка, которая, во-первых, максимизирует минималь-
- ное расстояние до первых двух точек, во-вторых, неколлинеарна с ними:
А = arg(min i (x i )), (2)
где x i – координата i -й точки перебора; arg(min( f ( x )) – значение минимума функции.
В = агд(тах(|р ( -рл|), (3)
где P i - координаты i -й точки перебора; рА - координаты точки A ; arg(max( / ( x )) - значение максимума функции.
С = arg ^m^Cmin^lP i — Р А II, llP i -РвЮ)^ ,
где рв - координаты точки B .
Описание алгоритма RANSAC [9] .
Требуется найти тройку точек, которая дает наилучшее совмещение с шумными данными через максимизацию числа инлайеров.
Инлайеры – это точки, для которых евклидово расстояние между преобразованной точкой N и ее зашумленной версией меньше заданного порога τ:
-
^^(p i - ^ оп ) + ^ шум - Q i ^ < т, (5)
где т - заданный порог. В работе принимается равным 5 как единица шага полигональной сетки тела ЛА; ^оп - опорная точка; ^шум - зашумленная точка; R - матрица поворота; P i - преобразованная матрицей поворота точка ^оп; Q i - преобразованная матрицей поворота точка ^шум.
Алгоритмические шаги:
-
1. Для каждой итерации k = {1, …, N } случайно выбирается тройка точек Τ k = { i , j , l }, где i , j , l – значения x , y , z точки T k в системе координат ENU.
-
2. С помощью алгоритма Кабсха вычисляется матрица поворота Rk между опорными точками p i , p j , p l и зашумленными точками q i , q j , q l [10]:
Коп=1^ЕТкРт;(6)
In
^шум ^ХтеТ^Чг;
Н = Хт£Т^(рт - ^оп) (qt - Млум) ;(8)
Н = ^УТ;(9)
Я = ™Tl det(B>-i ;
Я = У
(0 1 0 VI
V О 0 det^)/ Цй> -1
.
(6), (7) – центрирование точек;
-
(8) – ковариационная матрица H ;
-
(9) – SVD-разложение ковариационной матрицы H на матрицы U , Σ, V ;
-
3. О ц е н к а ин л а йе ров и с охр анение троек точек с наибольшим числом инла й еро в :
(10), (11) – вычисление матрицы поворота R .
Q i — ^(P i ^ оп ) + ^ шум ; (12)
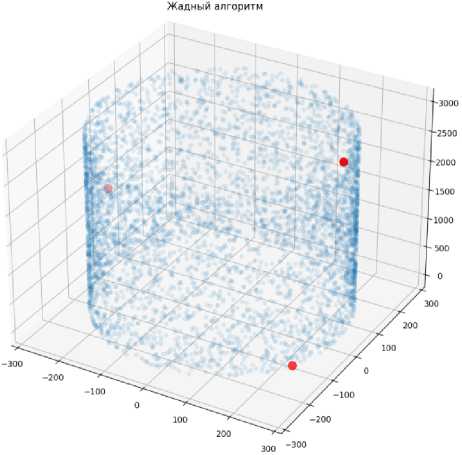
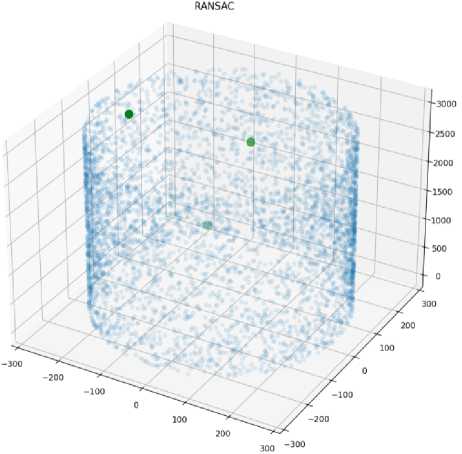
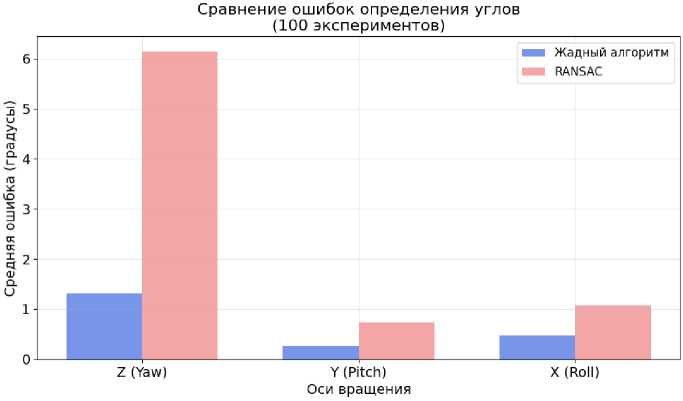
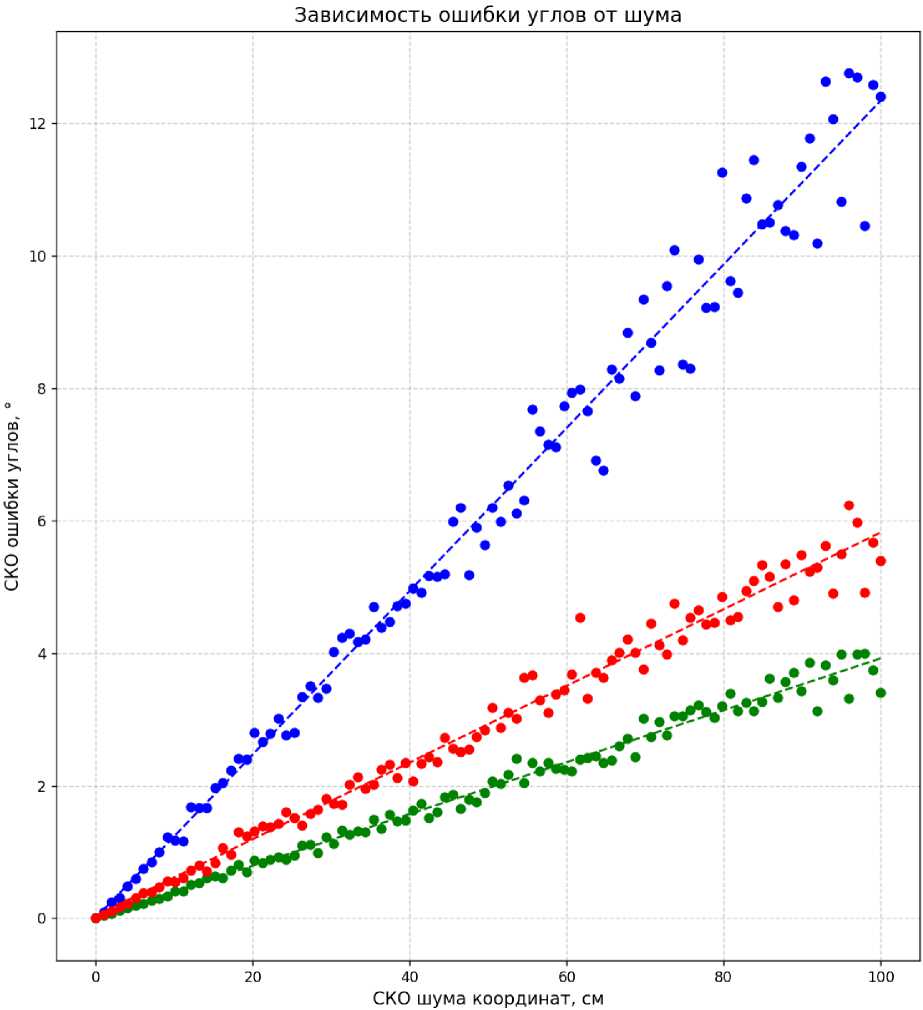
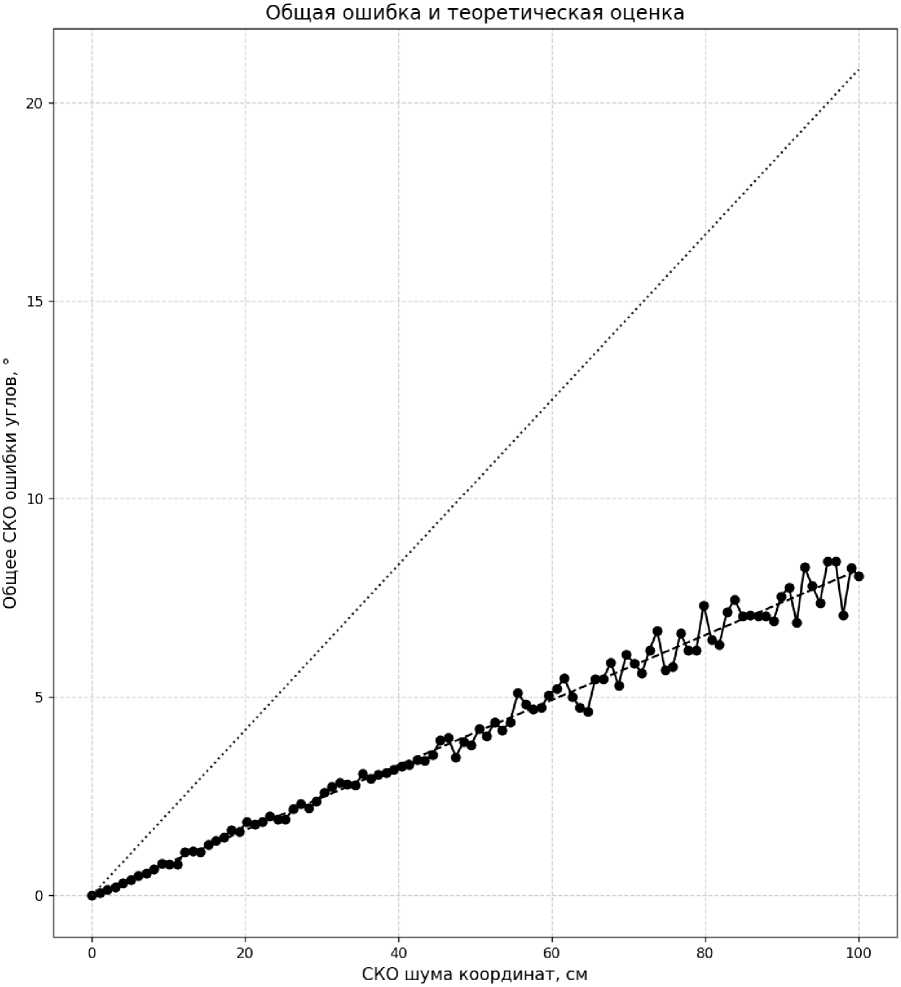
/ = 2ИЖ -Qi| где Qi - преобразованная зашумленная i-я точка; I - инлайер. При моделировании бралось тело ЛА, поверхность которого была представлена в виде массива точек. При применении двух алгоритмов, «жадного» и RANSAC, к телу ЛА получены две картины расположения приемников ГНСС (рис. 2а, b). a) Рис. 2. Применение алгоритмов оптимизации размещения приемников ГНСС: а – применение «жадного» алгоритма; b – применение RANSAC-алгоритма Fig. 2. Application of algorithms for optimizing the placement of GNSS receivers: a – application of the “greedy” algorithm; b – application of the RANSAC algorithm b) Тогда можно сравнить СКО ошибки определения углов Эйлера ЛА после применения данных алгоритмов (рис. 3). Рис. 3. Сравнение ошибок определения углов Эйлера ЛА после применения «жадного» алгоритма и RANSAC-алгоритма Fig. 3. Comparison of errors in determining Euler angles after applying the “greedy” algorithm and the RANSAC algorithm Путем компьютерного моделирования после ста применений двух алгоритмов было выяснено, что «жадный» алгоритм достаточно устойчив и показывает схожие друг с другом результаты, в то время как RANSAC-алгоритм абсолютно неустойчив и каждый раз выдает абсолютно разные и непредсказуемые результаты выбора трех точек для размещения приемников ГНСС. Более того, СКО ошибки определения углов Эйлера у «жадного» алгоритма в абсолютном большинстве случаев ниже, чем у RANSAC-алгоритма, а разброс значений данных СКО у «жадного» алгоритма в абсолютном большинстве случаев гораздо меньше, чем у RANSAC [11]. На основании выводов после многократного применения двух алгоритмов можно выдвинуть гипотезу о том, что неустойчивость RANSAC-алгоритма в данном случае связана с отсутствием выраженных особенностей геометрии на цилиндре, которым в исследовании приближают тело ЛА. «Жадный» алгоритм, напротив, использует глобальные геометрические свойства поверхности, что делает его более стабильным в таких условиях. Таким образом, в данных условиях наиболее применим «жадный» алгоритм нахождения точек для крепления приемников ГНСС на борту ЛА. Его следует использовать в работе. Дальнейшие операции с алгоритмами определения углового положения ЛА в пространстве будут происходить после применения именно «жадного» алгоритма. Нахождение зависимости СКО определения углов Эйлера от СКО шума координат Далее требуется определить и аппроксимировать влияние шума определения координат приемников на СКО шума определения углов Эйлера. Также нахождение данной зависимости поможет оценить, как работает алгоритм нахождения оптимального расположения приемников ГНСС и каков его результат [12]. Для каждого уровня СКО шума определения координат приемников ГНСС просчитывается среднее значение СКО шума определения углов Эйлера на 100 итераций: °ФХ,в = l^^i=ifi(.°x,y,z), (14) где Оф,^ - среднее СКО шума определения углов Эйлера ЛА; i - итерация. СКО шума определения углов Эйлера вычисляется по формуле [13] О = ^УУФ?, (15) где Oi - i-й угол Эйлера. Аппроксимация зависимости СКО определения углов Эйлера от СКО шума координат вычисляется по методу линейной регрессии с параметрами k и b на основе метода наименьших квадратов. Этот метод минимизирует сумму квадратов отклонений между наблюдаемыми значениями у и предсказанными значениями у , используя ковариацию между x и у и дисперсию их массивов, которые вычисляются по формуле [14] у' = кх + Ь; b = у' — кх', где х' - среднее значение массива значений x; у' - среднее значение массива значений у. Линейность определенной выше зависимости численно выражается с помощью коэффициента детерминации R2, равного квадрату коэффициента корреляции г [15]: R2 = г2 =( Cov(x,y) ^Var(^)^Var(y) ) Принято считать значение коэффициента детерминации R2 > 0,98 достаточным для констатации линейности зависимости x от y [16]. Зависимости СКО определения углов Эйлера от СКО шума координат, линейной регрессии и коэффициента детерминации представлены на рис. 4. Анализ рис. 4 показывает, что полученные во время моделирования данные хорошо аппроксимируются линейной зависимостью, коэффициент детерминации построенных регрессионных моделей составляет R2 > 0,98. Рис. 4. Зависимости СКО определения углов Эйлера от СКО шума координат, линейная аппроксимация этих зависимостей и коэффициент детерминации (линейности) Fig. 4. The dependence of the SD of the determination of the Euler angles on the SD of the noise of the coordinates, the linear approximation of these dependencies and the coefficient of determination (linearity) В таблице представлены параметры и коэффициенты выявленных линейных зависимостей. Параметры и коэффициенты зависимостей Parameters and coefficients of dependencies Угол Эйлера Аппроксимированная функция Коэффициент k Коэффициент b Коэффициент R2 Крена y = 0,123x + 0 0,123 0 0,981 Курса y = 0,039x + 0,01 0,039 0,01 0,985 Тангажа y = 0,058x + 0,04 0,058 0,04 0,982 Общая ошибка определения углового положения ЛА в пространстве теоретически определяется формулой [17] ^теор = arctg Q) • ^l2, (19) где r = 275 см – радиус цилиндра, приближающего тело ЛА. После применения «жадного» алгоритма оптимизации размещения приемников ГНСС на ЛА получим приближенную линейную функцию зависимости СКО определения углов Эйлера от СКО шума координат приемников и сравним ее с теоретической (рис. 5). Рис. 5. Общая ошибка и теоретическая оценка Fig. 5. General error and theoretical assessment На рис. 5 пунктиром показана теоретическая линейная функция зависимости СКО шума в определении углов Эйлера от СКО шума определения местоположения приемника ГНСС, сплошной линией – результат моделирования при определении данной зависимости, а штриховой линией – аппроксимация данной зависимости, полученной в результате моделирования: у = 0,082% + 0,01; R2 = 0,993. (20) Моделирование наглядно показывает, что после применения оптимизации размещения приемников ГНСС по «жадному» алгоритму удалось уменьшить влияние шума данных о координатах более чем в 2,5 раза по сравнению с теоретической оценкой, что явно свидетельствует о работоспособности и эффективности выбранных алгоритмов. Заключение Моделирование показало, что «жадный» алгоритм, основанный на выборе максимально удаленных друг от друга точек расположения антенн приемников ГНСС, демонстрирует высокую устойчивость и повторяемость результатов. В отличие от него, RANSAC-алгоритм оказался абсолютно неустойчивым для данной геометрии, выдавая каждый раз различные и непредсказуемые конфигурации точек. Установлено, что зависимость ошибки определения углов Эйлера от ошибки измерения координат является линейной. Наилучшая конфигурация, найденная «жадным» алгоритмом, позволила более чем в 2,5 раза уменьшить коэффициент передачи шума по сравнению с теоретической оценкой для неоптимизированного размещения. Проведенное исследование демонстрирует критическую важность оптимального взаимного расположения приемников для точного определения ориентации. Наиболее эффективным и надежным методом для размещения приемников ГНСС на цилиндрическом корпусе ракеты-носителя является «жадный» алгоритм. Его применение позволяет существенно повысить точность определения углового положения ЛА на критичных этапах полета, таких как взлет и посадка. Авторы выражают искреннюю признательность А.Л. Шестакову за профессиональное руководство по государственному заданию, ценные рекомендации и внимание к деталям на всех этапах работы. Особую благодарность авторы адресуют Е.Н. Прохоровой за стилистическое выверение и аккуратное оформление текста, повысившие качество представленного материала.