Волоконно-оптический преобразователь с увеличенным динамическим диапазоном измерения для мониторинга изменений профиля поверхности изделий машиностроения

Автор: Данилин Сергей Александрович, Чернявский Аркадий Жоржевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-1 т.18, 2016 года.
Бесплатный доступ
Рассматривается оригинальный контрольно-измерительный преобразователь, предназначенный для определения углового положения и профиля поверхности. Особенностью данного преобразователя является введение дополнительных конструктивных элементов, по сравнению с аналогичными преобразователями данного класса для достижения большего диапазона измерений.
Волоконно-оптический преобразователь, профиль, компаратор, микроконтроллер, аналого-цифровой преобразователь, излучение, электродвигатель, круговая частота, световод, перемещение
Короткий адрес: https://sciup.org/148204650
IDR: 148204650 | УДК: 531.781.2(079.4)
Fiber optic converter with increased dynamic range measurements for monitoring changes in the profile of surface engineering products
The original measurement converter, designed to determine angular position and surface profile. The peculiarity of this converter is the introduction of additional structural elements, compared with the same transducers of a given class to achieve a larger measurement range.
Текст научной статьи Волоконно-оптический преобразователь с увеличенным динамическим диапазоном измерения для мониторинга изменений профиля поверхности изделий машиностроения
Увеличение эксплуатационного ресурса изделий с криволинейными поверхностями напрямую связано с высокой точностью их изготовления, что обусловливает необходимость разработки экономичных и эффективных бесконтактных автоматизированных средств диагностики, контроля состояния профиля поверхности изделия. Мониторинг изменения профиля поверхности эксплуатируемого изделия позволяет выявить конструктивно-технологические недостатки или неисправности на ранней стадии их возникновения и принимать оперативные меры по их устранению.
В настоящее время подобные задачи решаются с помощью контактных и бесконтактных методов. Среди контактной группы методов наиболее известны щуповые измерительные приборы, отличающиеся дешевизной и простотой изготовления, но имеющие невысокую точность и значительную инерционность измерений. В качестве примера такого устройства можно привести координатно-измерительную машину [1], функционирование которой основано на использовании набора контактных датчиков, позволяющих определять расстояние от базового уровня до нескольких точек контролируемой поверхности и по результатам измерений делается заключение об угловом положении или профиле поверхности.
оптических систем при определении расстояний и перемещений, удовлетворительной крутизной преобразования информационного параметра, широким ассортиментом и доступностью излучающих и приемных полупроводниковых светодиодов и фотоприемников. Основными общими недостатками вышеперечисленных бесконтактных методов являются сложные в реализации сенсорные системы, нуждающиеся в точной юстировке, калибровке и обслуживании. Кроме этого, для параметрических, интерференционных оптических измерительных систем необходимо отметить существенную зависимость выходных параметров от отражающих свойств контролируемых поверхностей, их изменения в процессе измерения, а также существенного влияния на результаты измерений чистоты атмосферного измерительного тракта (задымленность и пыль, масляный и водяной туман).
Поэтому волоконно-оптический преобразователь для определения профиля поверхностей, обладающий всеми преимуществами оптических систем и независимый от влияния дестабилизирующих внешних факторов, предложенный в [3], требует дальнейшего развития, по крайней мере, в части расширения динамического диапазона измеряемых угловых положений поверхностей.
Для понимания сути вопроса необходимо рассмотреть основные операции способа [3] определения угловых положений поверхности объекта и элементы устройства для его осуществления. Структурная схема устройства приведена на рис. 1.
В соответствии со структурной схемой рассматриваемый способ осуществляется следующим образом. В некоторый момент времени световод 5 оптической насадки 4, приводимой в движение электродвигателем 9 с круговой частотой ω , займет положение, показанное на рис. 1. Поток источника 2 излучения по одному
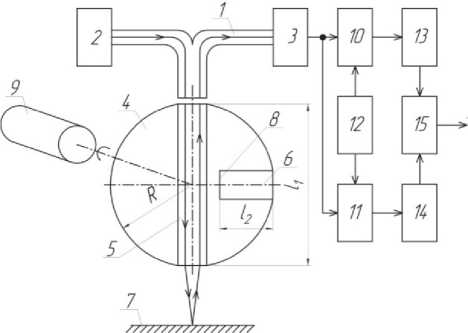
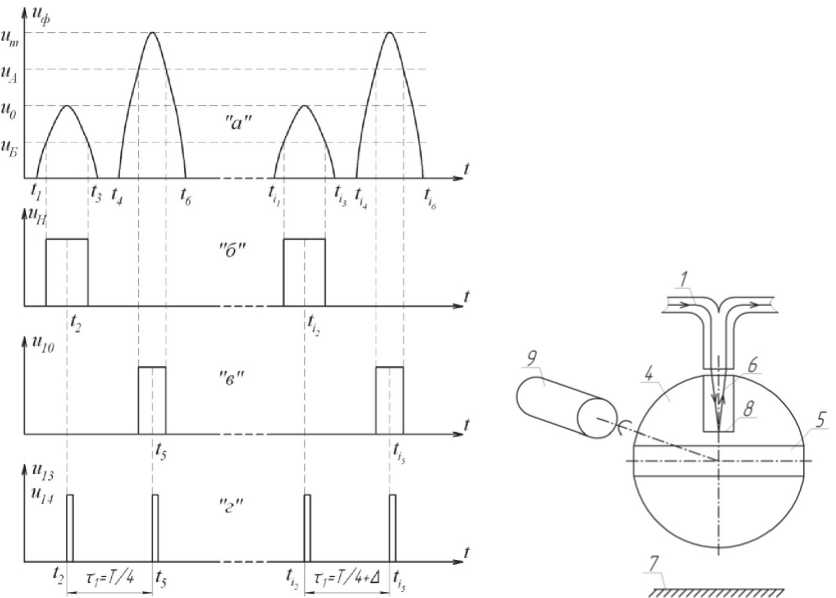
Рис. 1. Структурная схема устройства для реализации способа определения углового положения поверхности объектов из отводов светопроводящей системы 1 с ее приемно-передающего коллектора поступает в световод 5, пройдя который, излучается в направлении отражающего участка 7 контролируемой поверхности. Часть отраженного от участка 7 потока попадает обратно в световод, поступает на приемно-передающий коллектор светопроводящей системы 1 и подается на фотоприемник 3. Информационный электрический сигнал с фотоприемника 3, амплитуда которого u0 сравнивается в моменты времени t1 и t2 с уровнем компарирования uБ (рис.2д, диаграмма «а»)
формирователя 12 уровней компарирования, и компаратор 11 вырабатывает прямоугольный электрический импульс (рис.2 д , диаграмма «б»), середина которого соответствует моменту времени t2 , формируемого в блоке 14 определения середины электрических импульсов.
Через четверть периода вращения ротора электродвигателя 9 оптическая насадка 4 займет положение, приведенное на рис. 2 е . Поток от источника 2 излучения по одному из отводов светопроводящей системы 1 с приемно-передающего коллектора поступает в световод 6, пройдя который попадает на образцовую зеркально-от-ражающую поверхность 8, отражается от нее и через световод 6 отраженный поток попадает на приемно-передающий коллектор светопроводящей системы 1. Затем канализируется по второму отводу светопроводящей системы 1 и поступает на фотоприемник 3, где преобразуется в электрический сигнал, соответствующий потоку, отраженному от образцовой поверхности 8 и являющийся опорным электрическим сигналом. Опорный электрический сигнал фотоприемника 3, имеющий амплитуду um сравнивается в моменты времени t4 и t6 с уровнем компарирования uА (рис. 2 д , диаграмма «а») формирователя 12 уровней компарирования и компаратор 10 вырабатывает прямоугольный электрический импульс (рис. 2 д , диаграмма «в»), временная отметка середины которого соответствует времени t5 и формируется
д
е
Рис. 2. Временные диаграммы электрических сигналов, поясняющих реализацию способа определения углового положения поверхности объектов и элемент структурной схемы устройства для реализации способа определения углового положения поверхности объектов
в блоке 13 определения середины электрических импульсов. Так как амплитуда информационного импульса в несколько раз меньше опорного, то разделить их можно, используя различные уровни компарирования. В блоке 15 измеряется и регистрируется временной интервал τ 1 между временными отметками t2 и t5 (рис. 2, диаграмма «г»). Затем полученный временной интервал сравнивается с известным временным интервалом Т/4. Если τ 1 = Т/4, то угол отклонения контролируемой поверхности равен 0. В случае ее отклонения на некоторый угол α максимум диаграммы направленности потока, отраженного зеркально от участка 7 также отклоняется на угол α . Поэтому середина электрического импульса (рис. 2 д , диаграммы «б», «в») фотоприемника 3, соответствующая максимуму диаграммы направленности потока, отраженного от контролируемой поверхности, сдвигается во времени на величину ∆ ~ α относительно середины опорного импульса, условия формирования которого не меняются. Аналогично в i-момент времени в блоке 15 измеряется и регистрируется временной интервал τ 2 между временными отметками ti2 и ti5 (рис.2 д , диаграмма «г»). После этого, по временному расхождению ^ = т 2 — T /4 делается заключение о величине α ∼ k ∆ . Следует, отметить, что представленный способ и устройство для его реализации имеют узкий диапазон измеряемых угловых положений контролируемой поверхности, обусловленный ограниченностью длительности совместного существования излученного и отраженного световых потоков, что в свою очередь определяется конструктивно-технологическими соотношениями размеров приемно-передающего коллектора и световода оптической насадки.
Расширение диапазона измеряемых угловых положений поверхностей, соответственно и диапазона профилей, достигается за счет установки дополнительных световодов в оптическую насадку устройства [4]. Дополнительные световоды располагаются диаметрально в различных сечениях оптической насадки таким образом, что каждый последующий световод повернут в диаметральной плоскости оптической насадки относительно предыдущего на угол β . Геометрические построения и соотношения для определения углового расстояния между смежными световодами оптической насадки показаны на рис. 3 . Величина угла β определяется выражением:
β ≈ 2(l+r)/R, где l – радиус приемно-передающего коллектора; r – радиус световода; R – радиус оптической насадки.
Расположенные таким образом световоды формируют зондирующие излучения, которые следуют друг за другом и перекрывают тем самым необходимый диапазон изменения угловых положений поверхности.
Структурная схема волоконно-оптического бесконтактного преобразователя с расширенным динамическим диапазоном контроля профиля поверхности приведена на рис. 4. Здесь в электронном блоке А1 компараторами формируются прямоугольные импульсы, соответствующие информационному и опорному потокам. Блоки выделения середин электрических импульсов (БВСЭИ) вырабатывают временные отметки середин прямоугольных импульсов, которые в блоке регистрации временных интервалов (БРВИ) преобразуются в код информационного временного интервала. Если угловое положение локальной зоны превосходит по величине диапазон измерения канала, то отраженный световой поток не попадает обратно в первый световод и соответствующий прямоугольный импульс не формируется, что приводит к отсутствию информационного кода с выхода БРВИ-1. В этом случае микроконтроллер переходит к анализу состояния информационного кода следующего блока А2, который функционирует аналогично А1. Опрос каналов микроконтроллера производится последовательно до тех пор, пока в рабочем диапазоне угловых положений поверхности не будет зафиксирован информационный код контролируемой локальной зоны. Далее полученный информационный код поступает в микроконтроллер, который производит вычисление углового положения локальной зоны контролируемой поверхности. Результаты всех замеров в конкретных сечениях поверхности передаются на ПК, где в виде, удобном для пользователя, формируется графическое отображение изменения профиля контролируемой поверхности и в табличном виде – для документирования и хранения.
ВЫВОДЫ
Представленный волоконно-оптический преобразователь с тремя дополнительно введенными световодами и электронными блоками А1, А2, А3 позволяет расширить диапазон измеряемых угловых положений контролируемых поверхностей в 3 раза.
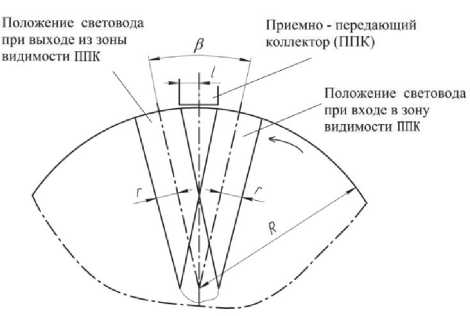
Рис. 3. Геометрические построения, определяющие угловое расстояние β между световодами, формирующими зондирующее излучение
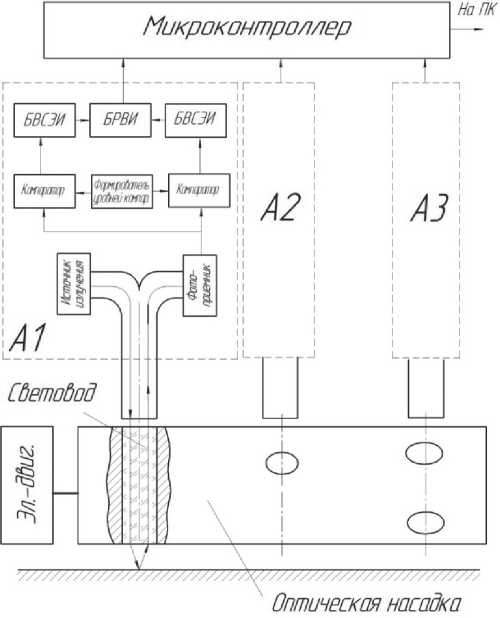
Рис. 4. Структурная схема волоконно-оптического бесконтактного преобразователя углового положения поверхности с расширенным динамическим диапазоном
Список литературы Волоконно-оптический преобразователь с увеличенным динамическим диапазоном измерения для мониторинга изменений профиля поверхности изделий машиностроения
- Неразрушающий контроль и диагностика: справочник/В.В. Клюев, Ф.Р. Соснин, А.В. Ковалев ; под ред. В.В. Клюева. 3-е изд., перераб. и доп. М.: Спектр: Машиностроение, 2005. 656 с.
- Данилин А.И. Бесконтактные измерения деформационных параметров лопаток в системах контроля и управления турбоагрегатами. Самара: Изд-во Самарского научного центра РАН, 2008. 218 с.
- Данилин А. И., Медников В.А., Прохоров С.П., Медников А.Г. Способ определения угловых положений поверхности объекта и устройство для его осуществления: авторское свидетельство СССР №1682784; опубл.07.10.1991; бюл. №37.
- Данилин А.И., Данилин С.А. Устройство определения угловых положений поверхности объекта: патент РФ №2555505; опубл.10.07.2015; бюл. №19.
