Вопросы использования БПЛА для проведения мониторинга качества береговых вод

Автор: Гумбатов Д.А., Алиева Х.С.Г.
Журнал: Природные системы и ресурсы @ns-jvolsu
Рубрика: Экология
Статья в выпуске: 1 т.14, 2024 года.
Бесплатный доступ
Исследования качества береговых вод проводятся с помощью как морских измерительных станций, так и БПЛА, оснащенных мультиспектральной и гиперспектральной аппаратурой. Результаты проведенных исследований показали, что качество береговых зон определяется в основном количеством водорослей и в частности морской капусты, основная масса которой оказывается под водой. Надводная часть обычно оценивается с помощью БПЛА оснащенной спектральной измерительной аппаратурой с большой погрешностью, так как требуется учесть влияние блеска и мутности морской поверхности. При этом учет подводной части этой растительности может быть осуществлен без влияния отраженной радиации надводной части. Для этой цели использована известная регрессионная зависимость отраженного сигнала надводной части от отношения отраженного сигнала синей части спектра к отраженному сигналу на участке перехода в краю красной зоны. Сформирована задача поиска такого вида функции зависимости радиации с края красной зоны от отражения с близкой инфракрасной зоны, при которой целевой функционал, формированный на базе указанной регрессионной зависимости и некоторого ограничительного условия, наложенного на искомую функцию, достиг бы минимума. Получено трансцендентное уравнение, решение которого позволяет определить характер искомой зависимости, при которой влияние радиации с надводной части исследуемой растительности минимально влияет на результат оценки подводной части растения.
Бпла, водоросли, отраженная радиация, качество воды, оптимизация
Короткий адрес: https://sciup.org/149146358
IDR: 149146358 | УДК: 574.576 | DOI: 10.15688/nsr.jvolsu.2024.1.4
Issues of using UAVS to monitor the quality of coastal waters
Coastal water quality studies are carried out using both marine measuring stations and UAVs equipped with multispectral and hyperspectral equipment. The results of the conducted research have shown that the quality of coastal zones is determined mainly by the amount of algae and, in particular, seaweed, the bulk of which is under water. The surface part is usually estimated using a UAV equipped with spectral measuring equipment with a large error, since it is necessary to take into account the effects of gloss and turbidity of the sea surface. At the same time, accounting for the underwater part of this vegetation can be carried out without the influence of reflected radiation of the surface part. For this purpose, the well-known regression dependence of the reflected signal of the surface part on the ratio of the reflected signal of the blue part of the spectrum to the reflected signal at the transition site at the edge of the red zone is used. The task of searching for such a type of function of dependence of radiation from the edge of the red zone on reflection from the near infrared zone is formed, in which the target functional formed on the basis of the specified regression dependence and some restrictive condition imposed on the desired function would reach a minimum. A transcendental equation has been obtained, the solution of which allows us to determine the nature of the desired dependence, in which the influence of radiation from the surface part of the vegetation under study minimally affects the result of evaluating the underwater part of the plant.
Текст научной статьи Вопросы использования БПЛА для проведения мониторинга качества береговых вод
DOI:
Хорошо известно, что беспилотные летательные аппараты (БПЛА) обладают высоким пространственным разрешением и не имеют такие проблемы, свойственные спутниковому дистанционному зондированию как влияние атмосферы, облаков [2]. БПЛА широко используются для определения качества береговых вод [3; 4; 7; 10].
Исследования качества береговых вод проводятся путем проведения с помощью как морских измерительных станций, так и БПЛА, оснащенных мультиспектральной и гиперспектральной аппаратурой. Например, как указывается в работе [11], с этой целью были использованы восемь станций, установлены в заливе Chesapeake (США). Станции были оснащены гиперспектральными измерителями, работающими в спектральном диапазоне 320–950 нм с интервалом 3,3 нм. Полученные результаты сопоставлялись с результатами измерений с применением БПЛА, оснащенными пятиканальными измерителями Mica Sense. Это устройство имеет следующие измерительные каналы: синий канал (475 нм, ширина полосы 32 нм); зеленой канал (560 нм, ширина полосы 27 нм); красный канал (668 нм, полоса пропускания 14 нм); канал края красной зоны (717 нм, полоса пропускания 12 нм); канал NIR (842 нм, с полосой 57 нм).
В указанных морских станциях проводятся контактные измерения хлорофилла и общего количества взвешенных частиц (TSS).
Вместе с тем, применительно к береговым зонам элементами загрязнения морских вод считаются водоросли, или морская капуста (kelp), которая является трехморным высокопродуктивным морским растением, представляющим экономическую ценность для населения прибрежной зоны [6; 8]. Указанный фактор актуализирует исследование к оценки потенциала этого растения как его надводной, так и подводной компоненты. Учет объема надводной части с использованием ее излучения в NIR области затрудняется наличием морским блеском в поверхности воды, мутностью воды [1; 9].
Традиционным образом, учет и исследование состояния растений осуществляется применением сигналов спектральной зоны «край красной зоны» (670–750 нм).
В общем случае, суммарный сигнал NIR диапазона, регистрируемый спектрометрами БПЛА определяется как
R uas ( NIR ) = R rs ( NIR ) + p ( NIR ) + '1 , (1)
Ed где RRS(NIR) – сигнал NIR диапазона, извлекаемая с поверхностной части растительности; ρ(NIR) – компонента NIR диапазона из-за блеска поверхности воды; Lsky – небесное излучение; Ed – пере излучения из глубин воды.
Маскирование ρ ( NIR ) согласно [11] может быть осуществлено методом «темного»
Lsky пикселя, а компонента определяется с ис-Ed пользованием модели радиационного переноса [6]. Компоненты Rrs(NIR), может быть оп- ределена с помощью нелинейного регрессионного уравнения [5].
С учетом (3) и (4) напишем
R rs ( NIR ) = 0,025exp
- 3,469 - R uas ( blue ) . Ruas ( red edge ) .
+ 0,00013. (2)
R r2s ( NIR ) = 0,025 Urs ( NIR ) exp
- 3,469 - R uas ( blue ) R UAS ( red edge X R rs ( NIR ) )
+ 0,00013 R rs ( NIR ).
+
Регрессионная функция (2) графически изображена на рисунке. Таким образом, задача обеспечения уменьшения доли сигнала RUAS ( NIR ) в сигнале RUAS ( red edge ) сводится к уменьшению влияния Rrs ( NIR ). При этом следует определить такую взаимосвязь между и при которой такое влияние могло бы быть приведено к минимуму.
Материалы и методы
Для решения указанной задачи можно ввести на рассмотрение функциональную зависимость
R UAS ( red edge) = R UAS ( red edge) ( R rs ( NIR )) (3)
Рассмотрим сценарий, когда БПЛА исследует множество точек в зоне береговых вод в количестве n . Из полученных результатов измерений можно сформировать два множества:
Rrs(NIR) = {Rrs(NIR)}; i = 1,n ;(6)
RUAS (red edge) = {RUAS (red edge)} }; J = 1, n .
Будем считать, что множество Rrs ( NIR ) является упорядоченным, то есть элементы удовлетворяют условию
Rrs (NIR) = Rrs (NIR),-, + ARrs (NIR), где 'ARrs (NIR) = const; Rrs (NIR)0 = 0.
И далее вычислить такой вид функции (3), при которой некоторый функционал, характеризующий мощность сигнала Rrs ( NIR ) достиг бы минимума.
Рассмотрим возможность формирования функционала, характеризующего мощностные характеристики Rrs ( NIR ) по множеству исследуемых береговых зон, загрязненных водорослью типа «морская капуста». Умножим каждую из сторон выражения (2) на Rrs ( NIR ). Получим
С учетом (5) и (8) составим дискретную сумму Fg , где
F g = E n = i 0,025 U rs ( NIR ), exp
3,469 - R uas ( blue )
RUAS ( red edge ) ( Rrs ( NIR )).
R s ( NIR ) = 0,025 Rrs ( NIR ) exp
- 3,469 - R uas ( blue ) . Ruas ( red edge )
+ 0,00013 Rrs ( NIR ).
Рассмотрим задачу выбора такого вида функции R uas ( red edge ) ( Rrs ( NIR )) , при которой Fg достигает минимума, то есть суммарный вклад отраженной ближне-инфракрасной радиации от надводной части морского растения достигает минимума и в основном извлекается RUAS ( red edge ), то есть извлекается информация о подводных частях этого растения.
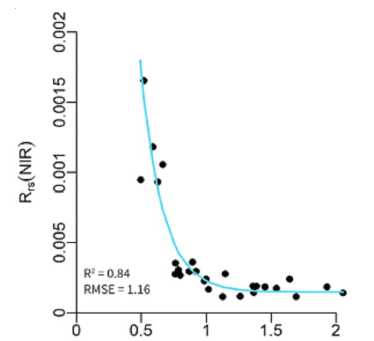
RuAs(blue)/RUAS(rededge)
Кривая нелинейной регрессионной функции взаимосвязи между отношением
R UAS ( blue ) R uas ( red edge )
и Rrs ( NIR )
Для решения указанной задачи в первом приближении осуществим переход от дискретной модели (9) на непрерывную модель в виде непрерывного функционала FH , где
F H = j O' rs ( NIR ) 'ax 0,025Urs ( NIR ) exp
3,469 • R uas ( blue ) R uas ( red edge )( R rs ( NIR )).
X d ( Urs ( NIR )).
X
Решение непрерывной оптимизационной задачи (10) может быть осуществлено по методу вариационного анализа при выполнении одного условия, суть которого заключается в наложении к искомой функции определенного ограничительного условия. Рассмотрим случай, когда указанное ограничительное условие F огр имеет вид
F orp = f U rs ( NIR) ""R uas ( red edge 1 x x ( Rrs ( NIR )) d ( R rs ( NIR )) = C , где C = const .
Из (15) находим
J 3,469 • R UAS ( blue 1 =
[ R UAS ( red edge X Rrs ( NIR )).
^R uAA rededge^
0.025U rs ( NIR 1 3,469 • R uas ( blue 1 '
Таким образом, полученное выражение (16) является трансцендентным уравнением относительно искомой функции R uas ( red edge ) ( Rrs ( NIR ^ Задача нахождения оптимального вида этой функции не имеет аналитического решения и может быть решена вычислительным путем при заданных значениях Rrs ( NIR ) и RUAS ( blue ).
Решение задачи удовлетворит условие достижения минимума функционала (10), так как вторая производная интегранта в функционале (14) по искомой функции оказывается положительной величиной.
Заключение
Отметим, что смысл ограничения (11) заключается в сужении пространства непрерывных и дважды дифференцируемых функций до некоторого подпространства, элементы которого удовлетворяют условию (11). С учетом (10) и (11) составим целевой функционал F 0 безусловной вариационной оптимизации по следующей схеме:
F o = F h + ^ [ F OrP — C ]■ (12)
С учетом (10), (11), (12) получим
F 0 = j 0 rs ( NIR 1 "ax 0,025 Urs ( NIR ) exp
3,469 • R uas ( blue ) R UAS ( red edge X R rs ( niR ))
X
X d ( Urs ( NIR )) + (13)
+ 4 Urs ( NIR 1 -Ruas ( red edge X R rs ( NIR )) d ( R rs ( NIR )) - C ] .
Решение оптимизационной задачи (13) должно удовлетворить условию:
d j o,O25 U „ ( NIR )exp [-
3,469 • R UAS ( blue ) 1
R A ( red edge X R s ( NIR 1Ц
- ^ R UAS ( red edge X R„ ( NIR 11
dR UAS ( red edge X R„ ( NIR 11
= o. (14)
С учетом (14) получим
0,025 Urs ( NIR 1 exp
3,469 • R uas ( blue 1
Ruas (red edge1(Rrs (niR 11.
X 3,469 • R UAS ( blue 1 - л = 0
R UAS ( red edge 1( R rs ( NIR 11 2
Сформулирована и решена задача оптимального использования БПЛА для мониторинга качества береговых вид. Отмечена, что качество береговых зон определяется в основном количеством водорослей и в частности морской капусты в береговых водах. При этом основная масса этой растительности оказывается под водой. Надводная часть обычно оценивается с большой погрешностью методами дистанционного зондирования так как требуется учесть влияния блеска и мутности морской поверхности. Таким образом, учет подводной части водорослей должен быть осуществлен путем такой оценки RUAS ( red edge ), которая в минимальной степени подвержена влиянию Rrs ( NIR ). Для этой цели использована известная регрессионная зависимость Rrs ( NIR ) от отношения RUAS ( blue )/ RUAS ( red edge ). Введена на рассмотрение функция RUAS ( red edge ) ( Rrs ( NIR )) и сформирована задача поиска такого вида этой функции, при которой целевой функционал, формированный на базе указанной регрессионной зависимости и некоторого ограничительного условия наложенного на искомую функцию, достиг бы минимума. Получено трансцендентное уравнение, решение которого позволяет определить характер искомой зависимости.
Список литературы Вопросы использования БПЛА для проведения мониторинга качества береговых вод
- Cavanaugh K.C., Bell T., Costa M., et al. A Review of the Opportunities and Challenges for Using Remote Sensing for Management of Surface- Canopy Forming Kelps. Front. Mar. Sci., 2021, vol. 8. DOI: https://doi.org/10.3389/fmars.2021.753531
- Anderson K., Gaston K.J. Lightweight Unmanned Aerial Vehicles Will Revolutionize Spatial Ecology. Front. Ecol. Environ., 2013, vol. 11, no. 3, pp. 138-146. DOI: http://dx.doi.org/10.2307/23470549
- Arango J.G., Nairn R.W. Prediction of Optical and Non-Optical Water Quality Parameters in Oligotrophic and Eutrophic Aquatic Systems Using a Small Unmanned Aerial System. Drones, 2019, vol. 4, no. 1, pp. 1-10. DOI: http://dx.doi.org/10.3390/drones4010001
- Dugdale S.J., Kelleher C.A., Malcolm I.A., et al. Assessing the Potential of Drone-Based Thermal Infrared Imagery for Quantifying River Temperature Heterogeneity. Hydrol. Process., 2019, vol. 33, no. 7, pp. 1152-1163. DOI: http://dx.doi.org/10.1002/hyp.13395
- Siegel D.A., Wang M., Torena M.S., Robinson W. Atmospheric Correction of Satellite Ocean Color Imagery: The Black Pixel Assumption. Appl. Opt., 2000, vol. 39, no. 21, pp. 3582-3591. DOI: http://dx.doi.org/10.1364/AO.39
- Druehl L.D., Wheeler W.N. Population Biology of Macrocystis Integrifolia from British Columbia, Canada. Mar. Biol., 1986, pp. 173-179. DOI: https://doi.org/10.1007/BF00569124e00683
- Johnston D.W. Unoccupied Aircraft Systems in Marine Science and Conservation. Annu. Rev. Mar. Sci., 2019, vol. 11, pp. 439-463. DOI: https://doi.org/10.1146/annurev-marine-010318-095323
- Kain M.J. Patterns of Relative Growth in Neurocytes Luetkeana (Phaeophyta). J. Phycol, 1987, pp. 181-187. DOI: http://dx.doi.org/10.1111/j.00223646.1987.00181.x
- Schroeder S.B., Dupont C., Boyer L., et. al. Passive Remote Sensing Technology for Mapping Bull Kelp: A Review of Techniques and Regional Case Study. Glob. Ecol. Conserv., 2019, no. 19. DOI: https://doi.org/10.1016/j.gecco.2019
- Lee E., Yoon H., Hyun S.P., et al. Unmanned Aerial Vehicles (UAVs)-Based Thermal Infrared (TIR) Mapping a Novel Approach to Assess Groundwater Discharge into the Coastal Zone. Limnol. Oceanogr. Methods, 2016, vol. 14, no. 11, pp. 725-735. DOI: http://dx.doi.org/10.1002/lom3.10132
- Windle A.E., Silsbe G.M. Evaluation of Unoccupied Aircraft System (UAS) Remote Sensing Reflectance Retrievals for Water Quality Monitoring in Coastal Waters. Front. Environ. Sci., 2021. DOI: https://doi.org/10.3389/fenvs.2021.674247
