Вопросы оптимизации функционирования лазерного сканера в режиме измерения деформаций

Автор: Ганиева Сачлы Абдулхак Гызы, Вердиев Сафаиль Багир Оглы
Рубрика: Градостроительство, планировка сельских населенных пунктов
Статья в выпуске: 2 т.19, 2019 года.
Бесплатный доступ
Статья посвящена вопросам оптимизации функционирования лазерного сканера в режиме измерения деформаций. Сформулирована задача учета эффекта обратного рассеивания лазерного луча при оценке количества различимых градаций в отраженном лазерной луче, а следовательно, и при оценке информационных характеристик лазерного сканера при проведении деформационных измерений. Решение сформулированной оптимизационной задачи управления мощностью луча с учетом налагаемого ограничительного условия на искомую функцию показало, что при наличии линейной функциональной зависимости между мощностью луча и расстоянием до исследуемого объекта информативность проводимых циклических измерений достигает минимума. Указанный факт диктует необходимость реализации на практике функции адаптивного управления с обратной зависимостью мощности лазерного луча от расстояния лазера до объекта исследования.
Лазерный сканер, измерения, деформации, оптимизация, информативность, мощность луча
Короткий адрес: https://sciup.org/147232130
IDR: 147232130 | УДК: 528.7:528.5 | DOI: 10.14529/build190203
Issues on optimization of the laser scanner functioning in the deformation measurements regime
The article is devoted to the issues of optimization of the laser scanner functioning in the regime of deformation measurements. The task is formulated on taking into account the effect of back scattering of laser beam during assessment of the quantity of recognizable gradations in the reflected laser beam, and therefore, during evaluation of information characteristics of the laser scanner when performing deformation measurements. The solution to the formulated optimization task on controlling the laser beam power, with consideration to the limitation condition imposed on the sought-for function, does show that in case of linear functional dependence between the beam power and the distance to the studied object, the informativity of the carried out cycled measurements can reach the minimum value. This fact indicates to the necessity of practical realization of the function of adaptive control with inverse dependence of the laser beam power on the distance between the laser and the studied object.
Текст научной статьи Вопросы оптимизации функционирования лазерного сканера в режиме измерения деформаций
Как отмечается в работе [1], лазерные сканеры, обладая большой информативностью, позволяют осуществлять 3D-измерения с миллиметровой точностью. Согласно [1] при проведении туннельных измерений с помощью сканера типа Leica HDS 6100 на расстоянии 6 м была получена погрешность порядка 0,4 мм. В работе [2] сообщается о достижении точности 0,7 мм на расстоянии 16 м.
В общем случае использование лазерных сканеров в режиме деформационных измерений осуществляется по схеме автосинхронизированной триангуляции, реализация которой показана на рис. 1 [3].
Система позволяет осуществлять трехмерные деформационные измерения объектов на расстоянии от 0,5 м до 100 м при угле обзора 36 ° х40 ° .
Система позволяет получить два изображения: изображение интенсивности и изображение кодированной глубины. Система предусматривает измерение мощности лазера, а также разрешения получаемого изображения.
Следует отметить, что традиционно исследуется точность подобных систем с учетом расстояния удаленности исследуемого объекта. При этом делается упор на геометрические показатели, а влияние радиометрических показателей рассматривается без учета эффекта обратного рассеяния, возникающего в среде распространения лазерного луча.
Хорошо известно, что при распространении лазерного луча в атмосфере происходит обратное рассеивание излучения из-за отражения с газовых молекул и аэрозольных частиц. Вместе с тем в основном режиме функционирования геодезических лазерных сканеров, каковым является измерение расстояний информативным сигналом, яв- ляется отраженное с исследуемого объекта излучение. Следовательно, актуальным оказывается вопрос об оценке влияния обратно рассеянного сигнала на достоверность проводимых измерений расстояния с применением лазеров [4, 5]. В целом данный вопрос может быть охарактеризован в качестве оценки влияния радиометрического качества измерений на качество проводимых геометрических измерений [6]. Настоящая статья посвящена исследованию влияния сигналов обратного расстояния на информативность лазерных сканеров в режиме сканирования поверхности удаленных объектов.
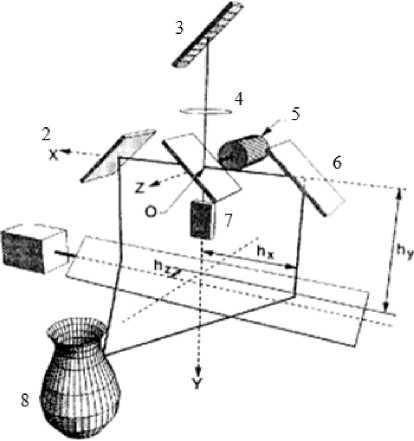
Рис. 1. Схема реализации принципа автосинхронизи-рованной триангуляции: 1 – сканер но оси Y ; 2 – фиксированное зеркало; 3 – фотоприемник типа ПЗС;
4 – собирающая линза; 5 – сканер по оси Х; 6 – фиксированное зеркало; 7 – лазер; 8 – объект
Материалы и метод
Прежде всего рассмотрим вопрос об оценке шумов в системе. Как показано в работе [6], сигнал обратного рассеивания лазерного луча нелинейно растет с ростом интенсивности самого луча, и как результат – отраженные с объекта сигналы сканеров могут быть измерены с более высокой достоверностью при использовании маломощных лазеров. Как видно из рис. 2 [6], среднее квадратическое отклонение (СКО) сигнала обратного рассеивания имеет тенденцию нелинейного роста с увеличением интенсивности исходного лазерного излучения.
В общем случае, как указывается в [6], сигнал обратного рассеивания в лазерных сканерах зависит от следующих факторов:
-
1) расстояние до объекта r ;
-
2) отражаемость поверхности объекта р ;
-
3) угол падения луча а .
Следовательно, имеет место функциональная зависимость
I = f ( R , р , а ) , (1)
Вместе с тем, если схема проводимых измерений не предусматривает измерения а , а среда является гомогенной, т. е. р = сonst, и изменению подлежит только R , то появляется возможность оптимизации серии проводимых измерений. Геометрическая схема проводимых измерений объекта с различных расстояний R = var показана на рис. 3.
Модельные исследования
Рассмотрим предлагаемую математическую модель информационной оптимизации циклических измерений исследуемой поверхности, находящейся на расстоянии R i ; i = 1, n , от лазерного сканера (рис. 3)
С учетом экспериментальных результатов, полученных в [6], будем считать, что шумы обратного рассеяния о о . р пропорциональны квадрату мощности излучателя, т. е.
о о . р = к 1 I о2 . (2)
Количество различимых градаций в отраженном сигнале лазерного сканера определим как m =
k 2 I 0 / R 2
V о о.р +о м
где ом - шумы оптоэлектронного узла обработки приемной части. С учетом (2) и (3) получим m =
k 2 I 0 / R 2
V k i I 02 +о м
Количество информации, извлекаемое при сканировании геометрической дистанции, соот- ветствующей углу сканирования а и расстоянию R, определим как
2 R tg а M = 2log 2 log 2
k 2 I 0 / R 2
7 ( k i I о 2 )2 + о ;2
Если условно принять, что множество дистанций проводимых измерений Ri содержит все значения R в интервале 0– Rm , то количество информации, извлекаемое при проведении циклических измерений, определим как
R m 2 r tg а
Mц = J .r log2 log2 0 A L k2I0/R2 dR. (6)
( k i I о 2)2 +о м
Введем на рассмотрение функцию адаптивно- го управления мощностью лазерного луча:
I о = 1 0 ( R ) - (7)
Согласно (7) мощность лазерного луча, используемого при измерениях, должна быть изменена в зависимости от расстояния между лазерным сканером и объектом.
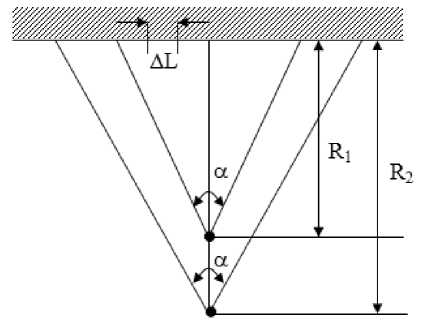
Рис. 3. Геометрическая схема проводимых циклических измерений
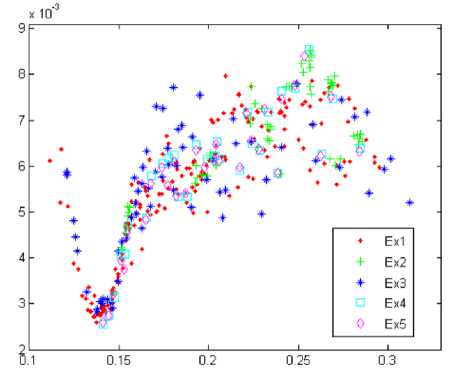
Рис. 2. Графическое отображение нелинейного роста СКО сигнала обратного рассеивания при увеличении интенсивности исходного лазерного излучения [6]
Список литературы Вопросы оптимизации функционирования лазерного сканера в режиме измерения деформаций
- Application of laser scanning for deformation measurements; a comparison between different types of scanning instruments / T. Nuttens, A. de Wulf, G. Deruyter et al. // Proceedings of the FIG Working Week 2012 Knowing to manage the territory, protect the environment, evaluate the cultural heritage Rome, Italy, 6-10 May 2012. - https:// www.researchgate.net/publication/259004269_Application_of_laser_scanning_for_deformation_ measurements_a_comparison_between_different_types_ of_scanning_instruments
- Pospisil, J. Using Laser scanning technologies for deformation measuring / J. Pospisil, B. Koska, N. Kremen. - http://k154.fsv.cvut.cz/~koska/publikace/ soubory/Zurich_AJ.pdf
- Beraldin, J.A. Practical Range Camera Calibration / J.A. Beraldin, S.F. El-Hakim, L. Cournoyer // SPIE Conference, Video metrics II, Massachusetts, September 9-10, vol. 2067. - P. 21-31.
- First experiences with the Trimble GX scanner / K. Hanke, P. Grussenmeyer, A. Grimm-Pitzinger, Th. Weinold // IAPRS XXXVI/5, Dresden, Germany, 2006.
- Valanis, А. Automatic target identification for laser scanners / А. Valanis, M. Tsakiri // IAPRS XXXV, Istanbul, Turkey. 2004. - https:// www.researchgate.net/publication/242037767_Investigating_terrestrial_laser_scanning_intensity_data_ quality_and_functional_relations
- Investigating terrestrial laser scanning intensity data: Quality and functional relations / N. Pfeifer, P. Dorninger, A. Haring, H. Fan. - https:// www.researchgate.net/publication/242037767_Investigating_terrestrial_laser_scanning_intensity_data_ quality_and_functional_relations
