Вопросы синтеза динамической модели для контроля и диагностики пилотажно-навигационных комплексов летательных аппаратов

Автор: Коптев А.Н., Кириллов А.В., Яковенко Н.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационно-космическое машиностроение
Статья в выпуске: 1-2 т.13, 2011 года.
Бесплатный доступ
Статья посвящена вопросам синтеза динамических моделей пилотажно-навигационных комплексов (ПНК) летательных аппаратов при их контроле и диагностике. В данной работе предложено решение некоторых вопросов диагностики систем ПНК, связанных со спецификой решаемых комплексом задач. Определены общие подходы к решению частных задач синтеза динамических моделей диагностируемых систем и агрегатов ПНК на основе тензорного анализа и теории образов.
Моделирование, пилотажно-навигационный комплекс, диагностика, динамический контроль, пространственно-временной образ, тензорный анализ сетей
Короткий адрес: https://sciup.org/148199618
IDR: 148199618 | УДК: 62.001.4
Questions of dynamic model synthesis for control and diagnostics of flying-navigating complexes for aircrafts
Article is devoted to questions of dynamic models synthesis of flying-navigating complexes (FNC) for aircrafts at their control and diagnostics. In the given work the decision of some questions of FNC systems diagnostics, connected with specificity of problems, solved by a complex is offered. The general approaches to the decision of private problems of dynamic models synthesis of diagnosed FNC systems and units on basis of tensor analysis and theory of images are defined.
Текст научной статьи Вопросы синтеза динамической модели для контроля и диагностики пилотажно-навигационных комплексов летательных аппаратов
Современные диагностические комплексы систем бортового оборудования прошли долгий путь развития, совершенствования, и представляют из себя мощные многофункциональные программируемые системы, способные выполнить в составе одного комплекса широкий спектр диагностических тестов, применительно к разным типам бортового оборудования. Несмотря на высокий технический уровень современных диагностических средств некоторые вопросы диагностики систем пилотажно-навигационного комплекса (ПНК) современных летательных аппаратов (ЛА) в силу специфики выполняемых задач остаются не решенными.
Анализ процессов контроля и диагностики ПНК показал, что лётные испытания выявляют достаточно высокий процент неисправностей, связанных с функционированием ПНК в целом в реальных динамических условиях. Однако лётные испытания не дешевы, и каждый авиапроизводитель стремится уменьшить объём внеплановых (повторных) вылетов для отработки обнаруженных дефектов. Решение этой задачи возможно на базе динамической модели всего пилотажно-навигационного оборудования как единого комплекса. Для создания такой модели и её реализации в рамках
динамической системы контроля и диагностики в наземных условиях необходимо решить ряд задач. Это позволит снизить объём летных испытаний и как следствие производственных затрат, при этом значительно повысить качество авиационной техники, обеспечив безопасность полётов.
Данная статья посвящена одному из центральных вопросов - синтезу динамической модели систем ПНК для решения задач диагностики на базе таких математических инструментов как теория образов У. Гренандера [1] и теория тензорного анализа Г. Крона [2]. Подобному подходу к решению задач диагностики посвящены труды А.Н. Коптева, В .А. При-лепского, Д.В. Гольдена, В.И. Сагунова, Г.М. Загрутдинова, Б.Г. Соловьева.
Под динамической моделью будем понимать множество регулярных конфигураций р(k) [1], где k - набор правил и ограничений, а само множество р(k) является пространственно-временным образом полной структуры ПНК, отражающим все пилотажные и навигационные задачами, выполняемыми комплексом в полёте. Таким образом, задача аппаратных средств диагностики в общей постановке сводится к сравнению полученного образа ПНК с реально существующим оригиналом. Представлением конкретной пилотажнонавигационной задачи является конфигурация ci е p(k) обладающая составом и структурой. Состав всякой конфигурации ci есть набор: Ci = {g 1,g2,gз...gn}, где g - образующая [1], являющаяся интерпретацией стандартных составных блоков и агрегатов моделируемых систем ПНК. Структура конфигурации с представляет собой множество σ соединений, существующих между всеми или некоторыми связями ω(gi) образующих, входящих в её состав. Множество σ можно задать с помощью квадратной матрицы инцидентности порядка Σω(gi), в которой единицы и нули указывают наличие или отсутствие соединения в определённых парах связей, которая ожжет быть представлена дельтой Кронекера [2].
На основе обобщённого понятия образующей и понятии о конфигурации, с учётом правил и ограничений, строим конфигурации для представления определённых контуров систем ПНК. В качестве примера конфигурации можно привести задачу поддержания ЛА на заданной траектории полёта на примере самолёта Ан-140 (рис. 1). В рамках решения поставленной задачи системы ПНК взаимодействуют следующим образом. Траектория полёта со всеми промежуточными пунктами предварительно программируется в бортовой системе приёма спутниковой навигационной информации СН-3301. По сигналам СНС ГЛОНАСС и GPS, а, также используя значение истинной воздушной скорости ( V ист ) от системы ИК ВСП и текущего курса ( φ тек ) от БСФК, аппаратура СН-3301 формирует и выдаёт в САУ сигнал заданного угла крена γ зад = f(z,z & , Δ ЗПУ ) , где: z & = W z – составляющая вектора путевой скорости, β – угол сноса. Получая значение γ зад , вычислитель САУ определяет закон управления по каналу крена δ эл = f ( γ зад ). Самолёт совершает эволюции, приводящие к возврату на траекторию полёта, определяя тем самым обратную связь всего процесса регулирования.
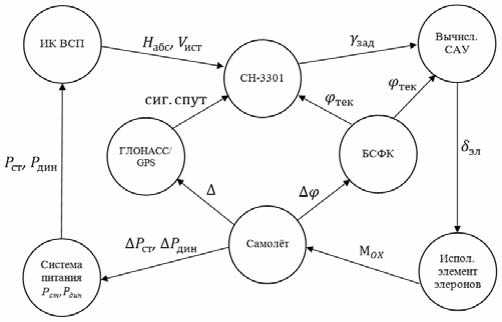
Рис. 1. Стабилизация ЛА на заданной траектории
При составлении образов любых систем бортового комплекса оборудования очевидно, что в составе полного изображения [1] временным изменениям подвержены только показатели связи введенных образующих:
β ij = f(t) .
Таким образом, введём дополнительное условие: X = R 3 x Rt , где Rt – пространство времени. В новом опорном пространстве Rt будем рассматривать полное множество показателей связи как множество временных образов. В целях синтеза временного образа введём три новых вида образующих и рассмотрим их свойства.
up up up
-
1. g i ( f i ( t), τ i ) – интерпретация увеличения, возрастания значения показателя связи β i по отношению к исходному состоянию. Данная образующая характеризуется двумя признаками: f iup (t) - функция времени, определяющая характер процесса восстановления. В качестве fi up (t) может выступать любая возрастающая функция, в том числе и скачёк. Второй признак τ iup характеризует длительность процесса возрастания в каких-либо единицах времени.
-
2. g i ( f i ( t), τ i ) – интерпретация
-
3. gi con ( Yi, τ i con ) , признаками которой являются длительность неизменного состояния Y i , τ i con - текущее значение, существующее в con
dow dow dow
уменьшения, снижение значения βi от уровня исходного состояния. Образующая gidow является противоположной в отношении образую-up щей gi и характеризуется аналогичными признаками: – законом fidow(t) и длительностью τidow процесса уменьшения. Двух введенных образующих недостаточно для формирования конфигурации временного образа. Не хватает ключевого звена – точки начала отсчёта, стартового уровня, характеризующего текущее положение показателя связи βi. Эту роль выполняет образующая.
течении времени τ i и являющееся значением показателя связи. На базе заданных образующих получена обобщённая временная конфигурация (рис. 2).
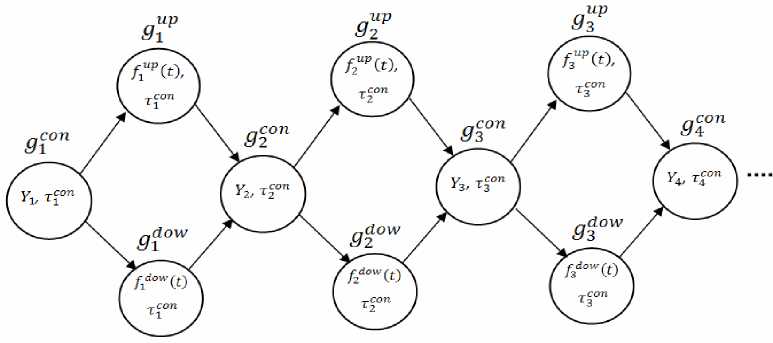
Рис. 2. Обобщённая временная конфигурация
Любой процесс начинается с исходного положения У/, которое существовало сколь угодно долгое время Tc° (образующая gcn). Далее наступает изменение У либо в сторону увеличения по закону flup (t), либо в направлении уменьшения по закону fi°w (t). По истечению времён соответственно либо т“р, либо Т0 параметр У/ приобретает новое значение У2, в котором будет находиться в течении вре-con мени Т2 (образующая gcn). На следующей итерации фигурантами подобного процесса выступают образующие g2р, g2°, g™" и т.д. В общем случае при t^^ временная конфигурация (рис. 2) устремляется в бесконечность:
^: 0(тир+т^+td=^
В частных случаях конфигурация (рис. 2) имеет количество из n итераций, в рамках которых завершается представляемое действие, происходящее в течении времени тп у” /-up , -d°w , con
^i=0(Ti + Ti + Ti ) = Tn
.
Сочетание конфигурации типового процесса (рис. 1) и временной конфигурации (рис. 2) позволяет формировать пространственновременные образы, применяемые в целях динамического моделирования систем ПНК любых ЛА при контроле и диагностике.
С общих позиций задачи диагностики можно свести к следующей постановке (рис. 3). Аппаратные средства контроля и диагностики (АСКД), скомплектованные в единый проверочный комплекс, имеющий в своём составе все необходимые элементы, обеспечивающие формирование и подачу оптимального множества воздействий:
X = { x1,x2,x3,...,xn } ,
на вход проверяемых систем и агрегатов ПНК и на вход, синтезированной в виде пространственно-временного образа, модели ПНК.

Рис. 3. Алгоритм диагностики
Отрабатывая входные возмущения сис-
,...
темы и агрегаты ПНК формируют множество:
УГ = {yl ,У2,Уз,-,yrm } выходных парамет ров. Так же пространственно - временная модель, испытывая деформации [1], формирует Yim im im im im
= {У1 ,y2 ,y3 ,...,ym }, являющееся идеальной реакцией, соответствующей полностью исправному ПНК. Далее мно-im r жества У и У сравниваются в анализаторе, который выполняет операцию: yr - yim > Ai, где Ai - пороговое значение, заданное для каждого контролируемого параметра технической документацией на объект контроля и диагно- стики.
Выводы: разработанный алгоритм контроля и диагностики обладает большой гибкостью и функциональностью, так как разработчик диагностических тестов вправе сам выбирать состав множество исходных воздействий X. И поскольку пространственно-временная модель ввиду полного соответствия способна отразить все режимы работы ПНК, то на базе одних и тех же АСКД, используя различные 1. модели, можно выполнять как оперативные 2 тесты, так и полную динамическую диагности ку современных пилотажно-навигационных 3. комплексов для оценки их состояния.
Список литературы Вопросы синтеза динамической модели для контроля и диагностики пилотажно-навигационных комплексов летательных аппаратов
- Гренандер, У. Лекции по теории образов. Том 1. Синтез образов. -М.: Мир, 1979. 383 с.
- Крон, Г. Тензорный анализ сетей. -М.: Советское радио, 1978. 720 с.
- Коптев, А.Н. Монтаж, контроль и испытания электротехнического оборудования ЛА/А.Н. Коптев, А.А. Миненков, Б.Н. Марьин, Ю.Л. Иванов. -М.: Машиностроение, 1998. 296 с.
