Воздействие импульсных магнитных полей на объекты, движущиеся с высокими скоростями

Автор: Глущенков В.А., Юсупов Р.Ю.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 т.24, 2022 года.
Бесплатный доступ
В работе представлен результат поискового эксперимента по воздействию импульсного магнитного поля (ИМП) на движущийся с высокой скоростью объект. Подтвержден факт такого воздействия при использовании плоского и цилиндрического индукторов. Описан созданный экспериментальный стенд для регистрации изменения траектории и скорости полета пули, с обеспечением требуемой временной увязки используемой аппаратуры. Даны направления использования ИМП для управления кинематикой различного рода быстро перемещающихся объектов.
Импульсное магнитное поле, движущийся объект, индукторы, экспериментальный стенд, траектория, скорость движения
Короткий адрес: https://sciup.org/148325296
IDR: 148325296 | УДК: 62-585.3 | DOI: 10.37313/1990-5378-2022-24-3-93-99
The effect of pulsed magnetic fields on objects, moving at high speeds
The paper presents the result of an exploration experiment on the effect of a pulsed magnetic field (PMF) on objects moving at high speeds. The fact of such an effect when using a flat and cylindrical inductor has been confirmed. The created experimental stand for recording changes in the bullet trajectory and its speed of the flight with the required time matching of the used equipment is described. The lines of using the pulsed magnetic fields to control the kinematics of rapidly moving objects of various kinds are given.
Текст научной статьи Воздействие импульсных магнитных полей на объекты, движущиеся с высокими скоростями
намические силы взаимодействия ИМП с электропроводящим материалом объекта – силы Лоренса. [11]
Движущееся тело перемещаясь, например, над плоским индуктором, соединенным с магнитно-импульсной установкой (МИУ), испытывает электродинамическое воздействие F, возникающее в результате разряда батареи конденсаторов МИУ на индуктор. [12, 13] (рис. 1).
Возможно два вида взаимодействия ИМП с движущимся объектом: в первом случае – в каждый момент времени объект условно не подвижен, а ИМП – переменное; во втором случае – наоборот, магнитное поле постоянно, а объект движется, пересекая линии магнитного поля. В общем случае на движущийся объект действуют одновременно две силы Лоренса.
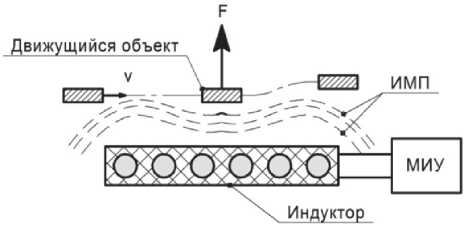
Рис. 1. Взаимодействие движущегося объекта в ИМП плоского индуктора
При первом виде воздействия переменное магнитное поле наводит в теле объекта вихревые токи, возникающие, при этом, электродинамические силы - результат взаимодействия двух полей: ИМП индуктора и магнитного поля от наведенных токов.
Во втором случае, возникающие силы Лоренса (векторная величина) зависят от угла между направлением силовых линий магнитного поля и направлением движения объекта. При совпадении направлений (синус угла равен нулю) эти силы можно не рассматривать.
Под действием ИМП движущееся тело получает электродинамического усилие F, изменяя скорость и траекторию движения. Время действия импульса пропорционально длительности разряда МИУ в диапазоне – 10-3…10-5 секунд, и должно быть согласовано с временем движения объекта над индуктором.
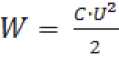
На рисунках 2 приведены примеры схем взаимодействия ИМП с движущимися объектами для цилиндрических индукторов: с активной цилиндрической и конической зоной воздействия.
Рассмотрим вариант взаимодействия ИМП с движущимся телом в цилиндрическом индукторе :
-
- во время движения тела от входа и до оси симметрии активной зоны индуктора вектор магнитной индукции ИМП направлен в противоположную сторону траектории движения, сообщая тормозящее усилие;
-
- при включении ИМП во время движения тела за осью симметрии активной зоны поле стремится вытолкнуть тело, сообщая ему дополнительное ускорение (рис. 2а).
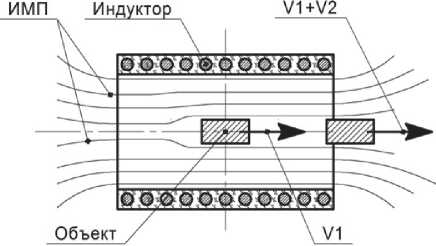
В коническом индукторе (рис. 2б), возникающая сила взаимодействия F1 раскладывается на две составляющие: горизонтальную и вертикальную. Вектор горизонтальной составляющей F2 направлен в противоположную сторону траектории движения. Конический индуктор представляет собой магнитную ловушку с «зеркальным» отражением, в которой напряженность ИМП сильно и плавно возрастает, что приводит к снижению скорости движения тела в выходной горловине индуктора. Если на траектории движения разместить несколько таких индукторов, то скорость движения можно свести до минимума.
Таким образом, взаимодействие ИМП с движущимися телами зависит: от конфигурации и размеров индуктора, от напряженности и длительности ИМП, направления и скорости движения тела, физических свойств материала тела и соотношения геометрических размеров тела и активной зоны индуктора.
СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ ВЗАИМОДЕЙСТВИЯ ИМП С ДВИЖУЩИМСЯ ОБЪЕКТОМ
При разряде емкостного накопителя энергии МИУ на индуктор, вокруг его витков формируется ИМП с напряженностью
Н = 105…107 А/м и длительностью τ = 10-3 …10-5 сек. В электропроводном теле движущегося объекта наводятся вихревые токи I2 = 10…100 кА, которые взаимодействуют с ИМП индуктора.
Энергия, запасенная в емкостном накопителе энергии МИУ, равна:
где С – емкость накопителя энергии; U – напря- жение заряда.
Величина электродинамической силы F, действующей на электропроводное тело в им- пульсном магнитном поле равна:
ri ' f2 F0 sina F = ,
2 • Jr ■ Ah
где I1 – ток в индукторе; I2 – наведенный ток в теле; l0 – длина тела; ∆h – расстояние между телом и витками индуктора; α – угол между направлением движения тела и направлением силовых линий ИМП.
Формула (2) справедлива для случая, если размер тела в направлении действия электродинамической силы F, больше глубины проникновения ИМП в материал тела, т.е больше величины скин-слоя – ∆:
∆ = , (3) ^” f^o f где ρ0 – удельное электрическое сопротивление материала тела; f – частота разрядного тока в индукторе; μ0 = 4π·10-7 – постоянная магнитная проницаемость.
(a)
Рис. 2. Схема взаимодействия ИМП с движущимся объектом при использовании: а) цилиндрического индуктор; б) конусного индуктора
ИМП
На рисунке 3 показана форма разрядного тока МИУ в индукторе, которая, в большинстве случаев, принимает форму затухающей синусоиды.
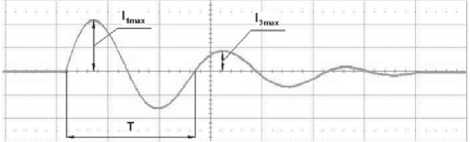
Рис. 3. Характер разрядного тока цепи: МИУ – индуктор – тело:
I1max – амплитуда 1 го полупериода тока,
I3max – амплитуда 3 го полупериода, Т – период колебаний)
Затухание тока характеризуется декрементом затухания δ и определяет характер силового воздействия на движущийся объект во времени:
δ = |^ ^imar , (4)
Ьтм
Как видно из рисунка 3, наибольший вклад на величину электродинамической силы F оказывает амплитуда первой полуволны тока – I1max, поэтому, при значительном декременте затухания тока влиянием последующих полупериодов можно пренебречь. Эффективная длительность импульса воздействующего на тело для колебательного характера разряда с небольшой погрешностью принимается равной периоду колебаний тока – Т.
Таким образом, электродинамическая сила, действующая на движущееся электропроводное тело, пропорциональна напряженности ИМП, т.е. величине тока в индукторе, длине тела и обратно пропорциональна расстоянию между телом и витками индуктора (зазору между ними).
МЕТОДИКА ПОИСКОВОГО ЭКСПЕРИМЕНТА
Цель поискового эксперимента – проверка практической реализации предложенного технического решения и оценка его эффективности.
На рисунке 4 приведена схема экспериментального стенда.
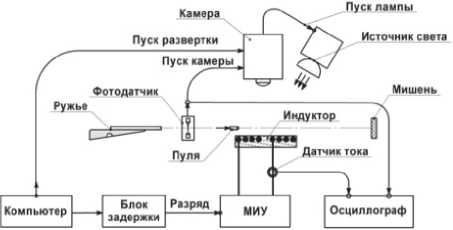
Рис. 4. Схема экспериментального стенда
Экспериментальный стенд, включает: МИУ с запасаемой энергией 10 кДж; высокоскоростную цифровую видеокамеру; импульсный источник света; бесконтактные оптические дат-

Рис. 5. Внешний вид измерительного комплекса чики синхронизации; датчик импульсного тока; цифровой запоминающий осциллограф и блок задержки запуска МИУ с регулируемой задержкой в диапазоне 10-5…10-3 секунд (рис. 5).
В эксперименте в качестве движущегося тела использовалась медная и свинцовая пуля, выпущенная из пневматического ружья. Начальная скорость пули: 150…170 м/сек. Медная пуля выполнена в виде цилиндра Ø4 мм, длиной 10 мм. Свинцовая пуля из стандартного комплекта ружья с размерами Ø4 х 8 мм.
Для воздействия ИМП на пулю использовались плоский (рис. 6) и цилиндрический (рис. 7) индукторы.

Рис. 6. Плоский индуктор
Плоский индуктор выполнен в виде спирали Архимеда и содержит 10 витков токопровода из медной шины 4 х 8 мм. Наружный диаметр индуктора 80 мм.
Цилиндрический индуктор представляет собой полую катушку, намотанную из 5 витков медной шины с внутренним диаметров 50 мм и рабочей зоной 30 мм.

Рис. 7. Цилиндрический индуктор
Ружье закреплялось жестко, обеспечивая стабильное направление полета пули над вит- ками плоского индуктора и по оси цилиндрического индуктора.
Траектория полета пули над плоским индуктором регистрировалось цифровой видеокамерой «Cordin 505» со скоростью 9000 кадров в секунду в режиме «отраженного света». Длительность свечения импульсной лампы подсветки – 3·10-3 сек.
Изменение траектории полета пули оценивалось по величине отклонения следа от пули на мишени. Изменение скорости пули сквозь цилиндрический индуктор рассчитывалось по обработке покадровой кинограммы на входе и выходе из индуктора.
На рисунке 8 представлен алгоритм управления аппаратурой стенда.
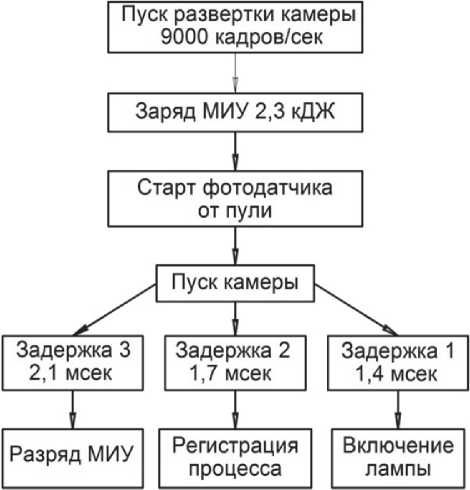
Рис. 8. Алгоритм работы экспериментального стенда
Синхронизация аппаратуры обеспечивалась оптическим датчиком в момент пересечения светового потока датчика летящей пулей с необходимыми задержками. Регулируя время задержки включения видеокамеры, регистрировались фрагменты полета пули на разном временном этапе. Одновременно измерялись электрические параметры силового воздействия: напряженность магнитного поля и разрядный ток в индукторе.
Запасаемая энергия МИУ регулировалась в пределах 2…5 кДж. Заряд накопителя энергии МИУ до заданного уровня осуществлялся заранее, затем МИУ находилась в ждущем режиме. Команда на разряд подавалась автоматически от компьютера с необходимой задержкой на время подлета пули к индуктору. Временная диаграмма работы основных элементов стенда показана на рисунке 9.
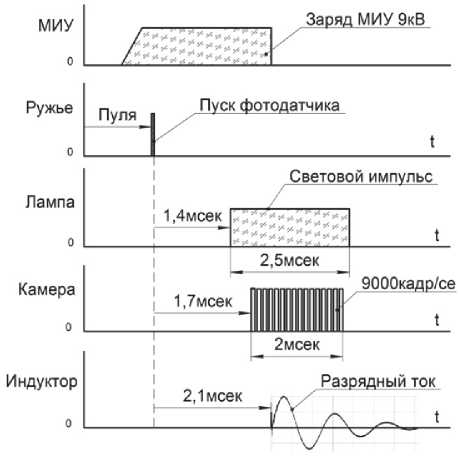
Рис. 9. Временная диаграмма работы экспериментального комплекса
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЯ
На рисунках 10 и 11 представлены фрагменты покадровой киносъемки траектории полета пули при воздействии импульсным магнитным полем плоского и цилиндрического индукторов.
Конечный результат эксперимента можно оценить по следам пули на мишени на рисунках
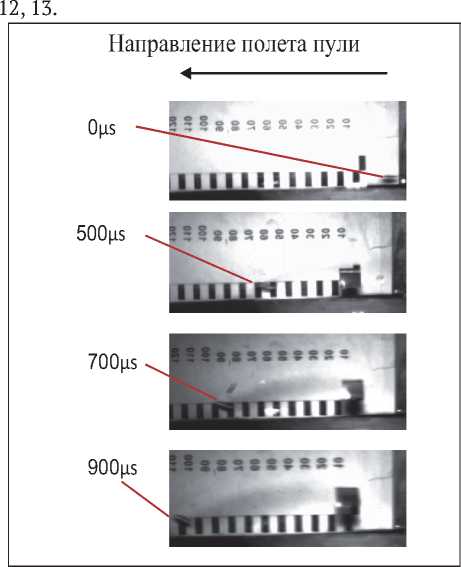
Рис. 10. Фрагменты киносъемки траектории полета пули с плоским индуктором под воздействием ИМП
На рисунке 11 фрагменты киносъемки полета пули сквозь внутреннюю полость цилиндрического индуктора
Направление полета пули
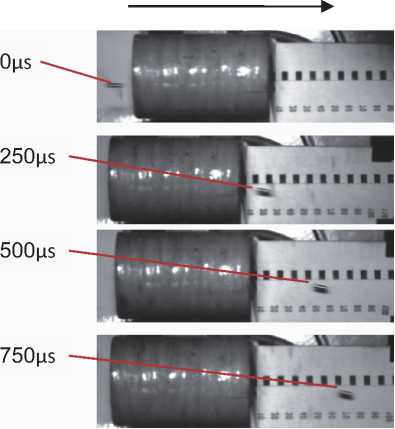
Рис. 11. Фрагменты киносъемки траектории полета пули с цилиндрическим индуктором
Мишень
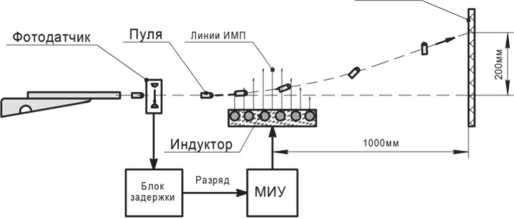
Рис. 12. Схема изменения траектории полета пули и ее взаимодействие с мишенью
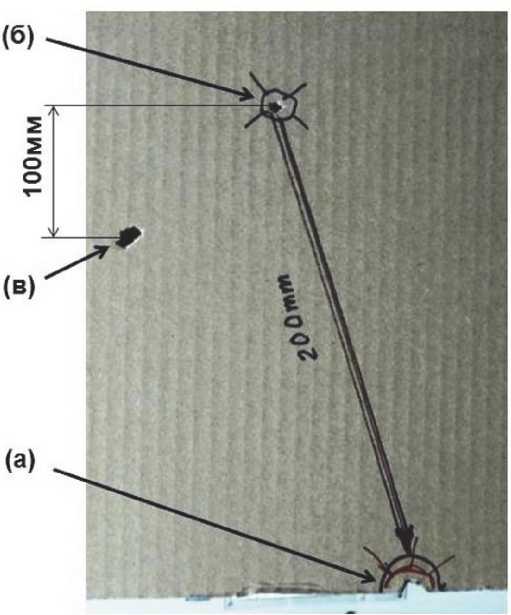
Рис. 13. Следы пули на мишени, установленной на расстоянии 1000 мм от индуктора (а) – без воздействия ИМП;
(б, в) – с воздействием ИМП)
В экспериментах с цилиндрическим индуктором скорость полета пули возрастала со 150 м/ сек до 180 м/сек при энергии заряда МИУ – 3,5 кДж.
При использовании конусного индуктора зафиксировано замедление полета пули.
Кроме того, как видно из кадров видеозаписи воздействие ИМП не только изменяет скорость и траекторию движения тела, но вызывает его вращение вокруг центра масс, как результат неравномерности распределения магнитного поля вдоль траектории полета, а также возможного исходного смещения центра тяжести пули.
ВЫВОДЫ
Возможные направления использования управляемого воздействия ИМП на движущиеся с высокими скоростями объектов:
Для защиты особо важных объектов с возможностью быстрого автоматического многократного воздействия, бесшумного регулирования степенью воздействия, применение в закрытых помещениях и др. [14]
Применение в различного рода испытательной технике на динамическую нагрузку. [15]
В устройствах технологического применения: импульсная клепка, дорнование, пробивка отверстий и др. [2…4]
При создании средств обеспечения защиты летательных аппаратов от внешних летящих с высо -кими скоростями тел (осколков, микрометеоритов).
ЗАКЛЮЧЕНИЕ
-
1. Подтвержден факт эффективности влияния импульсного магнитного поля на скорость и траекторию быстро-перемещающихся электропроводных тел.
-
2. Установлен эффект сопутствующего влияния ИМП на перемещающееся тело – придание вращательного движения, из-за неравномерности поля в индукторе и смещения центра масс тела.
-
3. Определены основные факторы управления магнитно-импульсным воздействием на быстро перемещающиеся тела: энергия разряда МИУ; кинематика движения; физические свойства тел; длительность импульса воздействия; напряженность магнитного поля и др.
-
4. Определены области применения метода воздействия ИМП на быстро перемещающиеся тела.
Отклонение траектории движения медного цилиндра с размерами Ø4 х 10 мм, перемещающегося со скоростью 150 м/сек над поверхностью плоского индуктора под воздействием импульсного магнитного поля напряженностью 105 А/м, составило 200 мм на расстоянии 1000 мм от индуктора.
При движении сквозь цилиндрический индуктор «на обжим» скорость движения тела увеличилась со 150 м/сек до 180 м/сек при энергии воздействия 3,5 кДж.
При использовании индуктора с конусной активной зоной «на обжим» с углом конусности α = 20о, скорость полета пули на выходе снизилась на 20 м/сек.
Список литературы Воздействие импульсных магнитных полей на объекты, движущиеся с высокими скоростями
- Пихтовников, Р.В. Штамповка листового металла взрывом / Р.В. Пихтовников, В.И. Завьялова. – М.: Машиностроение, 1964. – С.175 .
- Синельников А.Я. Устройство для магнитно-импульсной клепки// Патент на полезную модель РФ №100739, МПК B21J 15/24, 2010. Бюл. № 36
- Лысенко Ю.Д., Устинов Д.С. Одноударный магнитно-импульсный молоток. Патент SU № l564839, B21J 15/24, 1999, Бюл. №18.
- Бондалетов, В.Н. Магнитно-импульсный инструмент для клепки и методика его расчета / В.Н. Бондалетов, А.В. Воронов, В.А. Тютькин // Кузнечно-штамповочное производство. – 1984. – № 7. – С. 24-26.
- Чернов Е.Н., Однорал А.П., Тютькин В.А. Быстродействующий привод коммутационного аппарата. А.с. №514362, 1978, Бюл. №18.
- Балтаханов A.M., Буйнов А.Л., Тютькин В.А., Филистович В.М. Быстродействующий коммутационный аппарат. А.с. №1429187, 1988.
- Андреев, А.Н. Индукционное ускорение проводников и высокоскоростной привод / А.Н. Андреев, В.Н. Бондалетов // Электричество. – 1973. – № 10. – С. 36-41.
- Бондалетов, В.Н. Торможение массивных проводников импульсным магнитным полем / В.Н. Бондалетов, В.А. Тютькин // Электричество, 1979. - № 2. - С. 42-45.
- Бельков, В.А. Криминалистическое исследование огнестрельного оружия / В.А. Бель-ков, В.Т. Халапханов – Иркутск, 2016. – 206 с.
- Глущенков В.А., Юсупов Р.Ю. Способ активного изменения траектории движения ме-таллических тел, перемещающихся с высокой скоростью // Патент РФ № 2710963, МПК F41H 11/00, 2020. Бюл. № 2.
- Кнопфель, Г. Сверхсильные импульсные магнитные поля / Г. Кнопфель. – М.: Мир, 1972. – 392 с.
- Глущенков, В.А. Технология магнитно-импульсной обработки материалов / В.А. Глущенков, В.Ф. Карпухин. – Самара: Издательский дом «Федоров», 2014. – 208 с.
- Глущенков, В.А. Индукторы для магнитно-импульсной обработки материалов / В.А. Глущенков. – Самара: Учебная литература, 2013. – 148с.
- Татмышевский К.В. Магнитно-импульсные метательные средства поражения для систем активной защиты объектов особой важности / К.В. Татмышевский, С.Н. Марычев, С.А. Козлов // Современные технологии безопасности. – 2005. – №4. – С. 8-11.
- Татмышевский, К.В. Магнитно-импульсные установки для испытаний изделий авиа-космической техники на ударные воздействия / К.В. Татмышевский, С.А. Козлов // Авиакосмическое приборостроение. – 2005. – №12. – С. 52.
