Возможность образования металопотоков в расплаве под воздействием импульсного магнитного поля

Автор: В.А. Глущенков, К.В. Никитин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
В статье с помощью компьютерного моделирования и поискового эксперимента показана возможность формирования металопотоков в расплаве под воздействием динамического микросекундного импульса нагружения магнитным полем. Для анализа такого процесса выбрана схема динамического воздействия на расплав через размещенную внутри вязкой среды (расплава) металлическую пластину. При моделировании процесса использовался метод погружного тела (immersed body) в программном комплексе Ansys CFX. Получены визуализационные картины течения вязкой среды под воздействием импульсного магнитного поля (ИМП), демонстрирующие сложный характер ее перемещений во времени: образование локальных турбулентных зон вокруг движущегося погружного тела, взаимодействие прямых и отраженных потоков. Поисковый эксперимент, выполненный с помощью метода «тонких нитей», размещенных внутри вязкой среды, и движущихся под действием потоков при реальном магнитно-импульсном нагружении на погружную пластину, подтвердил основные выводы компьютерного моделирования.
Импульсное магнитное поле. расплав, метало потоки, компьютерное моделирование
Короткий адрес: https://sciup.org/148333494
IDR: 148333494 | УДК: 612.74 | DOI: 10.37313/1990-5378-2026-28-2-133-139
The Possibility of Metal Flow Formation in a Melt Under the Infl uence of a Pulsed Magnetic Field
Using computer modeling and a search experiment, the possibility of forming metal flows in a melt under the influence of a dynamic microsecond loading pulse is shown in the article. To analyze such a process, a scheme of dynamic action on the melt through a metal plate placed inside a viscous medium is chosen. The process was modeled using the immersed body method in the Ansys CFX software package. Visualization pictures of the flow of a viscous medium (melt) under the influence of an IMP were obtained, demonstrating the complex nature of its movements over time: the formation of local turbulent zones around a moving submerged body, and the interaction of direct and reflected flows. A search experiment performed using the method of “thin threads” placed inside a viscous medium and moving under the influence of flows during real magnetic-impulse loading on a submerged plate confirmed the main conclusions of computer modeling.
Текст научной статьи Возможность образования металопотоков в расплаве под воздействием импульсного магнитного поля
EDN: SVDJSW
ПОСТАНОВКА ВОПРОСА
Одно из направлений промышленного применения импульсных магнитных полей (ИМП) – разработка технологий, в которых реализуется динамическое воздействие ИМП на расплавы металлов. В работах [1-5] описаны металлургические технологии, технологии литейного, сварочного производств, основанные на воздействии ИМП на расплав. Это, например, процессы перемешивания расплава с целью получения гомогенной структуры, литья, гибридной сварки плавлением, прокатки жидкого металла, плакирования изделий из порошковых композиций расплавом, процессы 3Д печати при лазерном спекании метало-порошковой композиции и другие. При этом длительность силового воздействия на расплав составляет 50 -100 мкс. При столь коротком импульсе возникают значительные инерционные силы. Поэтому остается вопрос о возможности возникновения и распространения в объеме расплава металопотоков под действием столь короткого (микросекундного) силового воздействия. Из-за значительных инерционных сил предполагается возникновение и распространение в расплаве, в основном, волн напряжений. С другой стороны, ряд технологических процессов может быть реализован только благодаря значительным перемещениям расплава. Так, формирование контактных пробок в углебло-ках электролизного производства возможно только в результате значительного перемещения расплава в каналах блока [6]. Процесс плакирования изделий из порошковой композиции также требует перемещения (заполнения пор) расплавом [7]. В работе [8] даны схемы перемешивания расплава, для развития которых должна быть уверенность в возможности формирования металопотоков под воздействием ИМП. Развитие таких технологий требует доказательства возможности возникновения в расплаве ме-талопотоков под воздействием ИМП, изучения характера их формирования и развития, возможности управления ими. Ответы на эти вопросы и являются целью настоящей работы. При этом, используется как компьютерное моделирование, так и поисковый эксперимент.
ВЫБОР ТЕХНОЛОГИЧЕСКОЙ СХЕМЫ ВОЗДЕЙСТВИЯ ИМП НА РАСПЛАВ ДЛЯ МОДЕЛИРОВАНИЯ И ЭКСПЕРИМЕНТА
Чтобы более полно оценить эффекты воздействия ИМП на расплав, выбрана технологическая схема «погружного тела» (рис 1). В емкости из неметаллического материала с вязкой средой (модель расплава), установленной на индуктор [9], соединенный с магнитно-импульсной установкой [10], размещают металлическое тело (пластину).
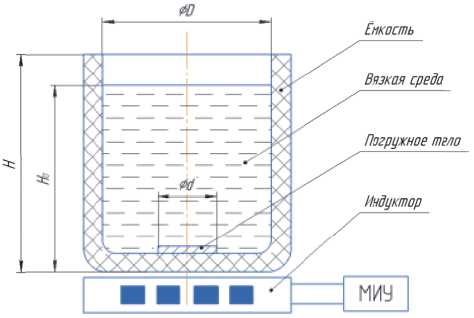
Рисунок 1. Технологическая схема «погружного тела» – динамического воздействия ИМП на расплав
При разряде батареи конденсаторов МИУ на индуктор возникающее вокруг его витков магнитное поле, свободно проникая через стенку неметаллической емкости, наводит в пластине вихревой ток, порождая электродинамическое усилие отталкивания пластины от индуктора. Таким образом, создается динамическое нагружение, передаваемое через пластину на вязкую среду. Так моделируется воздействие ИМП на расплав. Сам факт движения пластины уже будет свидетельствовать о возможности перемещения вязкой среды, т.е. возникновения ме-талопотоков. Геометрические размеры емкости, пластины, их взаимное расположение, объем вязкой среды, параметры магнитно-импульсного нагружения при выборе такой схемы по- зволяют исследовать процессы, возникающие в расплаве при различных граничных и начальных условиях. Кроме того, при выборе для моделирования схемы погружного тела появляется возможность дополнительно изучить локальные эффекты поведения вязкой среды вокруг движущейся пластины, например, образования вокруг нее турбулентных потоков. Эти эффекты помогут лучше понять механизмы возможного растворения лигатур в расплаве и использовать их, как сопутствующие, при таком методе воздействия ИМП на расплав.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ МОДЕЛИРОВАНИЯ
Для моделирования были выбраны геометрические размеры емкости и пластины при их симметричном относительно друг друга расположении , представленные на рис 1, и таблице 1.
Кинематическая вязкость среды 30 мм2/с выбиралась как можно более близкой к вязкости расплава алюминия, плотность R= 860 кг/м3. Форма импульса, прикладываемого к пластине, принималась прямоугольной с амплитудными значениями P ( 50 H и 100 Н) и длительностью t = 100 мкс (рис 2).
В исследуемых точках вязкой среды (с координатами x,y) (рис 3), определялись вектора скоростей ее движения через исследуемые промежутки времени от 0,1 до 2 с после приложения импульса.
В исследуемые моменты времени, кроме того, фиксировалось перемещение самой пластины, а также представлялась общая картина векторов скоростей вязкой среды во всем объеме при соответствующем перемещении пластины (визуализационные картины процессов) Моделирование процесса воздействия импульсного нагружения на вязкую среду основано на использовании уравнений гидромеханики [11]: Эти уравнения позволяют моделировать различные аспекты поведения вязкой среды под импульсным воздействием, в том числе эффекты турбулентности.
АЛГОРИТМ ПРОВЕДЕНИЯ CFD РАСЧЕТА
Процесс CFD расчета состоит из пяти основных этапов[12]:
-создание геометрической модели (CAD модели) исследуемого объекта, интересующей области течения вязкой среды;
- создание сеточной модели расчетной зоны (на базе CAD модели); процедура построения сеточной модели была произведена в ANSYS Mesh;
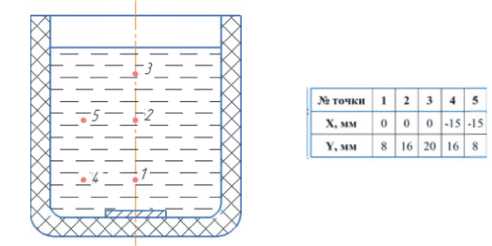
Рисунок 3. Координаты точек, в которых исследовалось поведение вязкой среды под воздействием импульса нагрузки
Таблица 1. Геометрические параметры технологического оснащения
|
0d мм |
0D мм |
Н о мм |
Н о мм |
|
10 |
50 |
25 |
30 |

t, сек
Рисунок 2. Форма и величина силового импульса воздействия на вязкую среду
-
- создание расчетной модели путем наложения на сеточную модель расчетных условий, исходя из физики процесса;
-
- поиск решения: определение значений параметров в каждой расчетной ячейке и исследуемой зоны в целом;
-
- представление результатов расчета в необходимом для анализа виде.
В нашем случае использовалась универсальная CAD система Ansys Space Claim Direct Modeler. Преимуществом данного CAD пакета является не только удобство и эффективность работы с ним, но и возможность использования функционала эскизного проектирования. С помощью простых инструментов Space Claim получена внутренняя область вязкой среды и твердотельная модель пластины. В методе погружного тела твердое тело представляется как геометрический объект, встроенный в расчетную область вязкой среды. В качестве элементов сеточной модели использовалась гекса структура. Преимущество гекса элементов по сравнению с тетра элементами в содержании в исследуемой области значительно меньшего количества элементов, что сокращает число решаемых уравнений и время расчета. При построении сеточной модели выполнялось требование совпадения размера элемента для пластины и для вязкой среды.Для задания силового воздействия использовался язык CEL, позволивший описать функцию P=f(t).
Метод погружного тела позволил использовать фиксированную сетку, не требуя ее адаптации в зависимости от движения тела, учесть влияние погружного тела на формирование потока среды, следить за изменением скоростей потока, в том числе в образующихся вокруг тела вихрях. При проведении CFD расчетов учитывались гравитационные силы. Расчет производился в нестационарной постановке.
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Исследованные режимы импульсного воздействия на вязкую среду приведены в таблице 2.
Таблица 2. Режимы моделирования.
|
№ режима |
Силовое воздействие P, н |
Количество импульсов нагружения |
Время приложения нагрузки t - 10 -6 с. |
Время между импульсами при многократном нагружении At |
|
1 |
50 |
1 |
100 |
|
|
2 |
50 |
3 |
0,1 |
|
|
3 |
100 |
1 |
||
|
4 |
100 |
3 |
0,1 |
На рисунке 4 в качестве примера приведены две визуальные картины векторных полей скоростей вязкой среды при различных режимах нагружения, перемещениях пластины и через разные промежутки времени.
Аналогичные картины получены для всех режимов нагружения и через различные промежутки времени. На приведенных рисунках виден сложный характер течения вязкой среды. Образование нескольких областей с разнонаправленным течением вязкой среды: вихревых потоков по боковым поверхностям пластины, восходящих и нисходящих потоков под и над пластиной, прямых и отраженных потоков от граничных поверхностей (стенок), их интерференции. При этом можно наблюдать изменение потоков во времени. Полученные визуальные картины наглядно демонстрируют наличие перемещения пластины и вязкой среды под действием микросекундного импульса нагружения. Так, для точки 1 (х 0, у 8) через 0.1 секунды после приложения импульса скорость среды по оси У достигает значения 0,261 м/с. Эта точка ближе всего расположена к пластине и вязкая среда в этой точке наиболее чувствительна к воздействию импульса. Но уже через 0,2 секунды скорость частиц среды в этой точке снижается до 0,03 м/сек, а через 0,5 секунды - падает практически до нуля 0,001м/с. Для точек 2 и 3 влияние импульса воздействия ослабевает, а для точек 4 и 5 определяется уже влиянием формирующихся турбулентных и отраженных потоков. Из полученных результатов видно, что увеличение амплитуды силового воздействия до 100 Н повышает начальные значения скоростей перемещения частиц вязкой среды как до, так и после перемещающейся пластины, но затухание процесса происходит более интенсивно.
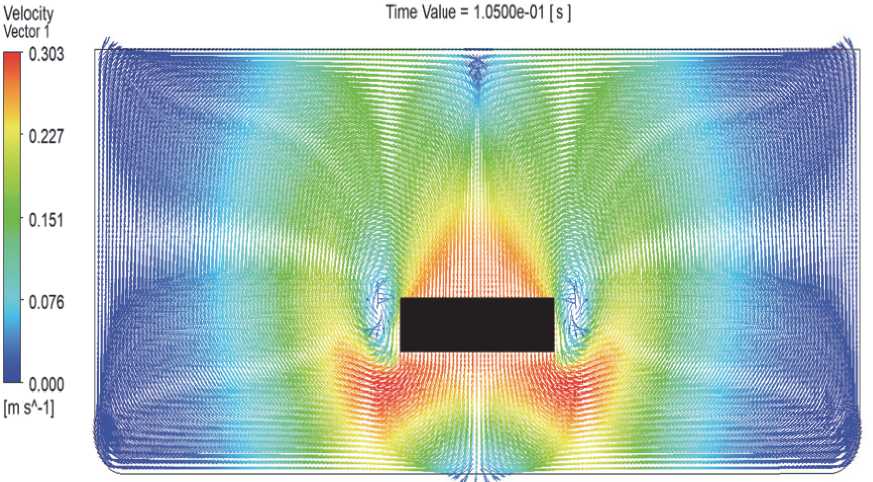
Режим нагружения P=50H, вр е мя t=0,1 с п осле возде й ствия одн о то импульс а (n=1)
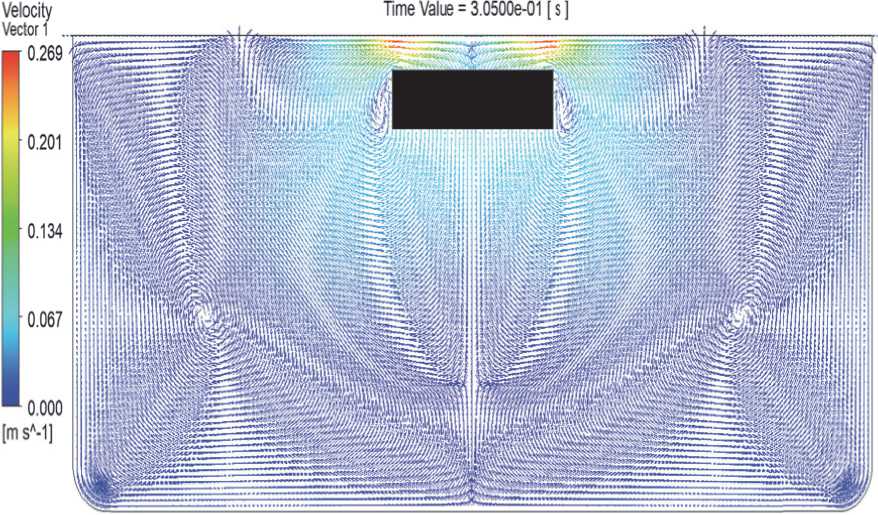
Режим нагружения P =50 H,. вре м я t=0,3 c после воздей с твия треть е го импуль с а (n=3).
Рисунок 4. Примеры визуализационных картин изменения векторных полей скоростей перемещения вязкой среды под импульсным воздействием
Количество импульсов нагружения слабо отражается на визуализационных картинах полей скоростей из за ослабевающего влияния последующих импульсов в связи с увеличивающимся расстоянием пластины от источника нагружения.
Обработка визуализационных картин применительно к исследуемым точкам 1-5 позволила получить изменение значений скоростей перемещения вязкой среды в фиксируемые промежутки времени для разных значений амплитуды нагружения. Пример таких изменений приведен в таблице 3.
Таким образом, программа численного эксперимента позволила:
-
1) оценить характер течения частиц среды в исследуемых точках объема через различные промежутки времени после приложения импульса нагрузки разной величины;
-
2) изучить влияние нескольких импульсов при тех же режимах нагружения.
ОБСУЖДЕНИЕ РЕЗУЛЬТАТОВ
МОДЕЛИРОВАНИЯ
Полученные результаты компьютерного моделирования поведения вязкой среды (расплава) под воздействием импульсного микросе-кундного нагружения с использованием модели «погружного тела» позволили увидеть сложную картину формирования металопотоков, их развития и взаимодействия во времени во всем объеме расплава в процессе перемещения пластины. Предложенная методика моделирования позволяет отследить перемещения частиц вязкой среды в Эйлеровской и Лагранжевой постановках, определить не только вертикальные, но и горизонтальные составляющие скоростей дви
Таблица 3. Изменения скоростей перемещения вязкой среды (Vу) во времени
после приложения импульса P= 50H
Исследуемые
точки
V y (t) м/с
t=0,1c
t=0,2c
t=0,3c
1
0,265
0,03
0,002
2
0,149
0,007
0,045
3
0,002
0,003
0,003
4
0,062
0,043
0,015
5
0,075
0,0005
0,003
жения частиц. Установлена довольно высокая эффективность такого воздействия при столь низких силовых параметрах. Полученные визуализационные картины движения вязкой среды открывают путь к управлению движением, определяют точки и время приложения последующих импульсов.
ПОИСКОВЫЙ ЭКСПЕРИМЕНТ
Цель поискового эксперимента установить факт возможности физического возникновения потоков вязкой среды под воздействием реального по форме и длительности магнитно-импульсного нагружения на погружное тело. Для фиксирования движения вязкой среды предложено использовать метод «тонких нитей». На дне прозрачного стеклянного стакана с вязкой средой (конденсаторным маслом) размещалась пластина из хорошо электропроводного материала (меди). Стакан устанавливался на много витковый индуктор, соединенный с магнитно-импульсной установкой. На крышке стакана закреплялись тонкие нити, на конце которых крепились микрогрузики, обеспечивающие нитям исходную вертикальность. Нити разной длины располагались с определенным шагом в диаметральной плоскости. Технологическая схема эксперимента приведена на рисунке 5.
При воздействии ИМП на погружную пластину форма нитей должна искажаться в соответствии с направлением и интенсивностью возникающего движения вязкой среды. Процесс отклонения нитей от вертикального их положения в результате движения вязкой среды фиксировался с помощью видео съемки. На рисунке 6 в качестве примера показан один стоп-кадр из снятого видеоряда процесса движения нитей, иллюстрирующий искажение нити в соответствии с развивающимся в объеме движением вязкой среды под влиянием перемещающейся пластины.
Наблюдаемое искажение формы нити служит доказательством возникновения потоков вязкой среды под силовым воздействием ИМП. Характер искажения нитей в какой то степени соответствует полученным с помощью компьютерного моделирования визуализационным картинам перемещения вязкой среды.
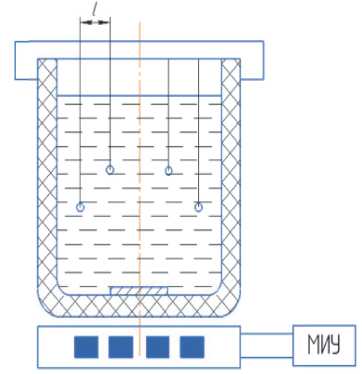
Рисунок 5. Технологическая схема поискового эксперимента
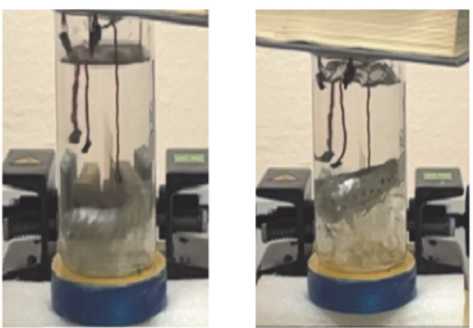
Рисунок 6. Видеокадр процесса искажения формы нитей под возникающим перемещением вязкой среды в результате воздействия ИМП на погружное тело
ВЫВОДЫ
Предложена и опробована компьютерная модель процессов формирования, развития и взаимодействия потоков вязкой среды, возникающих в ней под импульсным воздействием. Использовался метод погружного тела в программном комплексе Ansys CFX.
Получены визуализационные картины изменений движения частиц вязкой среды во времени во всем рассматриваемом объеме, в том числе с учетом возможного образования турбулентных зон, взаимодействия прямых и отраженных потоков, их взаимодействия. Представлены соответствующие векторные поля скоростей частиц вязкой среды во взаимосвязи с перемещением погружного тела.
Оценено влияние основных факторов (геометрических и силовых) на развиваемые скорости перемещения частиц в характерных точках, открывая путь управления процессом: определением интенсивности, местом, временем и количеством таких воздействий с целью образования в расплаве необходимых металопотоков.
Показана возможность и эффективность микросекундного силового воздействия на расплав.
Опробована методика экспериментального исследования перемещений частиц вязкой среды внутри исследуемого объема с помощью метода «тонких нитей».
Результат поискового эксперимента подтверждает факт образования потоков частиц вязкой среды под воздействием на нее погружного тела.
