Возможности робот-ассистированного эндопротезирования тазобедренного сустава при дисплазии

Автор: Дгебуадзе Г., Грицюк А.А., Шумский А.А., Мацакан А.М.
Журнал: Кафедра травматологии и ортопедии @jkto
Рубрика: Оригинальное исследование
Статья в выпуске: 3 (61), 2025 года.
Бесплатный доступ
Обоснование. Дисплазия вертлужной впадины создает значительные технические сложности при тотальном эндопротезировании тазобедренного сустава из-за анатомических особенностей и дефицита костной ткани для размещения компонентов эндопротеза. Применение робот-ассистированных технологий открывает новые возможности повышения точности хирургических вмешательств при данной патологии. Цель исследования. Провести сравнительную оценку эффективности робот-ассистированного и традиционного мануального методов тотального эндопротезирования тазобедренного сустава у пациентов с диспластическим коксартрозом. Материалы и методы. Проведено проспективное исследование ста операций тотального эндопротезирования тазобедренного сустава при диспластическом коксартрозе в период с 2023 по 2025 годы. Пациенты рандомизированы на две группы по пятьдесят человек. Первая группа оперирована традиционным мануальным методом, вторая с применением робот-ассистированной системы MAKO Robot через модифицированный переднебоковой доступ по Хардингу. Всем пациентам выполнялось комплексное предоперационное обследование включая оценку болевого синдрома по шкале VAS, качества жизни по опроснику SF-36, рентгенологическое исследование с определением степени дисплазии по классификации Crowe. Пациентам второй группы дополнительно проводилась компьютерная томография по специальному протоколу для трехмерного моделирования. Контрольные осмотры осуществлялись через три, шесть и двенадцать месяцев после операции. Результаты. Робот-ассистированная методика обеспечила точность позиционирования компонентов эндопротеза с отклонением не более одного миллиметра и одного градуса от предоперационного плана. Период использования костылей сократился с трех месяцев при мануальной технике до шести недель при робот-ассистированном подходе. Длительность госпитализации уменьшилась с шести до трех суток. Через год после операции показатели по шкале VAS составили ноль баллов в группе робот-ассистированного эндопротезирования против двух баллов в группе мануального метода. Качество жизни по опроснику SF-36 достигло девяноста пяти баллов против восьмидесяти баллов соответственно. Осложнений не зарегистрировано в обеих группах. Заключение. Робот-ассистированное эндопротезирование тазобедренного сустава при дисплазии демонстрирует значительные преимущества перед традиционными методами включая высокую точность позиционирования компонентов, сокращение периода реабилитации и улучшение качества жизни пациентов. Данная технология может рассматриваться как метод выбора при лечении диспластического коксартроза с перспективой широкого внедрения в клиническую практику.
Эндопротезирование тазобедренного сустава, дисплазия вертлужной впадины, робот-ассистированная хирургия, MAKO Robot, коксартроз
Короткий адрес: https://sciup.org/142246159
IDR: 142246159 | УДК: 616.728.2-089.227.84-77 | DOI: 10/17238/issn2226-2016.2025.3.7-14
Possibilities of robot-assisted hip arthroplasty in dysplasia
Background. Acetabular dysplasia creates significant technical difficulties in total hip arthroplasty due to anatomical features and bone tissue deficiency for placement of endoprosthesis components. The use of robot-assisted technologies opens up new opportunities to improve the accuracy of surgical interventions in this pathology. Objective. To conduct a comparative assessment of the effectiveness of robot-assisted and traditional manual methods of total hip arthroplasty in patients with dysplastic coxarthrosis. Materials and methods. A prospective study of one hundred total hip arthroplasty operations for dysplastic coxarthrosis was conducted from 2023 to 2025. Patients were randomized into two groups of fifty people. The first group was operated on using the traditional manual method, the second - using the robot-assisted MAKO Robot system through a modified anterolateral approach according to Harding. All patients underwent a comprehensive preoperative examination, including pain assessment using the VAS scale, quality of life using the SF-36 questionnaire, and an X-ray examination to determine the degree of dysplasia according to the Crowe classification. Patients in the second group additionally underwent computed tomography using a special protocol for three-dimensional modeling. Control examinations were carried out three, six and twelve months after the operation. Results. The robot-assisted technique ensured the accuracy of positioning of the endoprosthesis components with a deviation of no more than one millimeter and one degree from the preoperative plan. The period of using crutches was reduced from three months with the manual technique to six weeks with the robot-assisted approach. The duration of hospitalization was reduced from six to three days. One year after the operation, the VAS score was zero in the robot-assisted hip replacement group versus two points in the manual method group. The quality of life according to the SF-36 questionnaire reached ninety-five points versus eighty points, respectively. No complications were registered in either group. Conclusion: Robot-assisted hip replacement for dysplasia demonstrates significant advantages over traditional methods, including high accuracy of component positioning, shorter rehabilitation period, and improved quality of life for patients. This technology can be considered as a method of choice for the treatment of dysplastic coxarthrosis with the prospect of widespread implementation in clinical practice.
Текст научной статьи Возможности робот-ассистированного эндопротезирования тазобедренного сустава при дисплазии
В последние годы неуклонно растет число операций, выполняемых роботизированным методом при тотальном эндопротезировании тазобедренного сустава как в России, так и в других странах. Применение робота помогает выполнить индивидуальное предоперационное планирование, что обеспечивает точное положение компонентов эндопротеза [1, 2, 3]. Точность имплантации эндопротезов при ТЭТС современными роботами составляет до 1 мм и 1 градуса, индивидуально для каждого пациента [4, 5, 6].
Особенно важна точность робот-ассистированного эндопротезирования тазобедренного сустава при наличии дисплазии вертлужной впадины, когда мы имеем дело с «дефицитом» кости для размещения вертлужного компонента и правильного функционирования искусственного тазобедренного сустава [7, 8]. Технология робот-ассистированной тотальной артропластики включает в себя выполнение КТ по специальному протоколу, сегментацию изображения и планирование рас- положения чашки эндопротеза, интраоперационной навигации, визуализации и ассистирования роботической руки, что в совокупности помогает достигать высокой точности имплантации компонентов эндопротеза, с меньшей травматичностью и длительностью операции, достигать выравнивания длины конечности до 1 мм с контралатеральной [9, 10].
Цель клинического случая показать возможности робототехники при диспластическом коксартрозе, в сравнении с мануальной техникой эндопротезирования.
Методы исследования
Исследование проводилось на базе травматолого-ортопедического отделения в период с 2023 по 2025 годы. В ходе работы было выполнено сто операций тотального эндопротезирования тазобедренного сустава у пациентов с диспла-стическим коксартрозом. Все вмешательства были разделены на две равные группы в зависимости от применяемой хирургической техники. Первая группа включала пятьдесят операций, выполненных традиционным мануальным методом с использованием стандартного инструментария. Во второй группе проведено аналогичное количество вмешательств с применением робот-ассистированной технологии на базе хирургической системы MAKO Robot. Распределение пациентов по группам осуществлялось случайным образом с учетом сопоставимости по возрасту, полу и степени выраженности диспластических изменений.
Все пациенты в предоперационном периоде проходили комплексное обследование, включавшее клинический осмотр с оценкой амплитуды движений в тазобедренном суставе, определение степени укорочения конечности и функциональных нарушений. Болевой синдром оценивался по визуальной аналоговой шкале VAS, качество жизни определялось с помощью опросника SF-36. Рентгенологическое исследование включало выполнение обзорных рентгенограмм таза в прямой проекции с определением степени дисплазии по классификации Crowe.
Пациентам второй группы дополнительно выполнялось компьютерно-томографическое исследование по специальному протоколу для создания трехмерной модели тазобедренного сустава и планирования робот-ассистированного вмешательства. Предоперационное планирование в этой группе включало виртуальное моделирование операции с определением оптимальных размеров и позиционирования компонентов эндопротеза.
Хирургические вмешательства в обеих группах выполнялись через модифицированный переднебоковой доступ по Хардингу. В группе мануального эндопротезирования все этапы операции осуществлялись традиционными методами с использованием стандартных направителей и шаблонов. При робот-ассистированных операциях применялась система навигации с установкой позиционирующих датчиков на костные структуры таза и бедренной кости, что обеспечивало высокоточное выполнение всех этапов вмешательства в соответствии с предоперационным планом. Послеоперационное ведение пациентов включало раннюю активизацию на следующие сутки после операции с дозированной нагрузкой на оперированную конечность. Контрольные осмотры проводились через три, шесть и двенадцать месяцев после операции с оценкой клинических и рентгенологических результатов лечения. Статистическая обработка полученных данных осуществлялась с применением методов описательной статистики и сравнительного анализа показателей между группами.
Для демонстрации различий между методиками хирургического лечения ниже представлены два клинических примера, иллюстрирующих сравнительные возможности традиционного мануального и робот-ассистированного эндопротезирования тазобедренного сустава при диспластическом коксартрозе.
Первый случай тотального эндопротезирования тазобедренного сустава при диспластическом коксартрозе традиционным (мануальным) методом, второй случай с применением робот-ассистированного метода (хирургической системы «MAKO
Robot»). В обоих случаях пациенты до операции были информированы об особенностях хирургических вмешательств и получены разрешения на публикацию личных данных.
Случай 1 – пациентка А. в возрасте 67 лет, поступила в травматолого-ортопедическое отделение с жалобами на болевые ощущения, хромоту, ограничение движений в левом тазобедренном суставе и укорочение левой нижней конечности около 2 см. Со слов пациентки, болевые ощущения на протяжении более 5 лет, консервативное лечение не имело эффекта. Последние 6 месяцев пациентка отмечает прогрессирование болевых ощущений и ограничение амплитуды движений тазобедренного сустава.
Пациентка А. передвигается самостоятельно с опорой на трость, хромая на левую ногу. Амплитуда движений в левом тазобедренном суставе: разгибание/сгибание – 175°/40°, ротация наружная/внутренняя - 6°/0°/0°, отведение/приве-дение – 10°/0°/5°, сгибательно-приводящая контрактура. Выявлено укорочение левой ноги около 2 см. Ранее пациентке установлен тотальный эндопротез правого тазобедренного сустава, боли нет, амплитуда движений удовлетворительная.
На рентгенограммах таза в прямой проекции выявлено: Левосторонний диспластический коксартроз 3 «a» ст. по Crowe, с укорочением на 2 см. Эндопротез правого тазобедренного сустава. (Рисунок 1 а).
Тестирование по шкале VAS 9 баллов, по опроcнику качества жизни SF-36 (40 баллов): Физический компонент здоровья: 20 баллов; Психологический компонент здоровья: 20 баллов.

Рисунок 1. Рентгенограммы таза пациентки А.: а – до; б – после тотального эндопротезирования левого тазобедренного сустава
При контрольном осмотре через год после операции: результатом лечения пациентка довольна, отмечает длительный период реабилитации (3 мес. на костылях, далее еще 3 мес. курс реабилитации для полного восстановления). VAS 2 балла (при длительной нагрузке). Опросник качества жизни SF-36 (40 баллов): Физический компонент здоровья: 40 баллов; Психологический компонент здоровья: 40 баллов.
Случай 2 – пациентка Б. в возрасте 50 лет, при поступлении в травматолого-ортопедическое отделение жаловалась на болевые ощущения, хромоту, ограничение движений в левом тазобедренном суставе и укорочение нижней конечности на 2 см. VAS 9 баллов, Опросник качества жизни SF-36 (40 баллов): Физический компонент здоровья: 20 баллов; Психологический компонент здоровья: 20 баллов.
Согласно результатам опроса, боль в суставе пациентка испытывает в течение последних 15 лет, с прогрессированием боли, хромоты и ограничением амплитуды движений в последние 12 месяцев. Проведенное консервативное лечение не принесло положительного результата.
Пациентка Б. передвигается самостоятельно, без использования дополнительной опоры, прихрамывая на левую ногу. Амплитуда движений в левом тазобедренном суставе: разгибание/сгибание – 75°/40°, ротация наружная/внутренняя – 6°/0°/0°, отведение/приведение – 10°/0°/5°, сгибательно-при-водящая контрактура, движения болезненные, укорочение около 2 см.
По результатам обследования и КТ-сканирования по специальному протоколу для робота, пациентке был установлен диагноз: «М16.3. Левосторонний диспластический коксартроз 3 «а» Crowe, укорочение нижней конечности на 2 см. Рекомендовано оперативное лечение: тотальное робот-ассистированное эндопротезирование левого тазобедренного сустава.
В начале операции в область крыла левой подвздошной кости в передней верхней части фиксировали тазовые датчики позиционирующей матрицы тремя винтами Шанца (Рисунок 2).
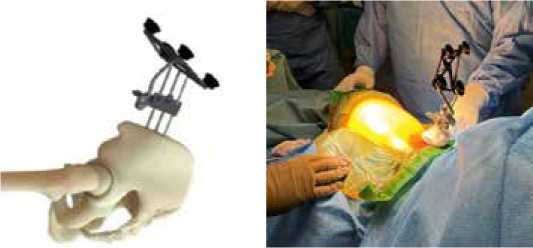
Рисунок 2. Фиксация тазовой позиционирующей матрицы в крыло подвздошной кости
Далее в области середины нижнего края левого надколенника фиксировали позиционирующую пряжку (Рисунок 3).
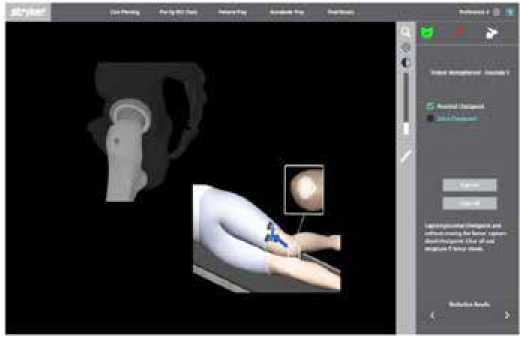
Рисунок 3. Точка фиксации позиционирующей пряжки в области середины нижнего края левого надколенника
Затем выполняли модифицированный переднебоковой доступ по Хардингу к тазобедренному суставу. В области верхнего края крыши вертлужной впадины и большого вертела бедренной кости устанавливали металлические клипсы для тестирования местоположения костных ориентиров (Рисунки 4 а и б).
аб

вг
Рисунок 4. Положение чекпоинтов: а – схема расположения в области верхнего края крыши вертлужной впадины, б – схема в области большого вертела бедренной кости; интраоперационная картина: в – точка тазового датчика, г – бедренного датчика
Вывихивали головку бедренной кости и выполняли остеотомию шейки (Рисунок 5).
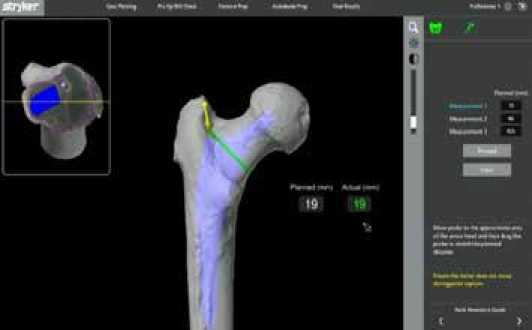
Рисунок 5. Схема выполнения остеотомии шейки бедренной кости

а
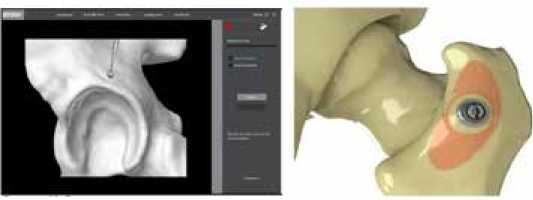
После удаления синовиальной оболочки и суставной губы обнажали край вертлужной впадины, выполняли регистрацию костных поверхностей тазобедренного сустава по схеме на экране компьютера (Рисунок 6).

бв
Рисунок 7. Компьютерная схема операции: а – роботизированная рука с фрезой вертлужной впадины, б – предоперационный план (3D модель), в – расположение вертлужного компонента в режиме реального времени
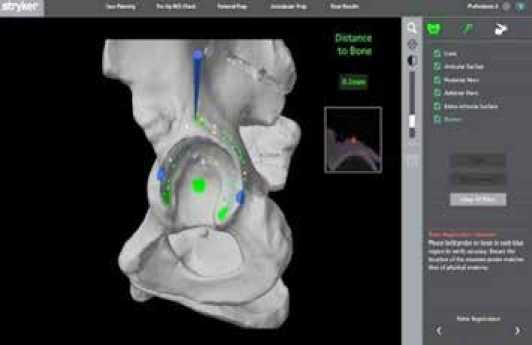
Рисунок 6. Схема регистрация костных ориентиров тазобедренного сустава
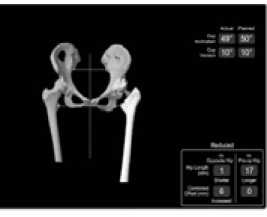
Далее выполняли имплантацию компонентов эндопротеза Stryker: ацетабулярный компонент Trident 54mm\E, бедренный компонент Accolade 3, вкладыш 32/E. После этого одевали примерочную головку и при помощи инфракрасных датчиков определяли длину конечности и офсет бедренной кости. После чего имплантировали необходимую головку COBALT CHROME 32/+4). КТ-3D снимки тазобедренного сустава пациентки Б. до и после оперативного вмешательства представлена на рисунке 8.
С помощью роботизированной руки выполняли римирование вертлужной впадины фрезой в соответствии с предоперационным планом (Рисунок 7 а-в), стоит отметить что в режиме реального времени робот позволяет нам видеть глубину посадки чашки в вертлужную впадину до 1 мм, задавать углы чашки в коронарной и аксиальной проекции, и видеть степень ее покрытия костью во время ремирования кости.

а
б
Рисунок 8. КТ-3D снимки тазобедренного сустава пациентки Б. а – до, б – после оперативного вмешательства
На следующие сутки после операции выполнена контрольная рентгенография тазобедренного сустава. Положение эндопротеза корректное (Рисунок 9).

Рисунок 9. Контрольная рентгенография таза после операции
В результате оперативного лечения длина конечности у пациентки восстановлена. Послеоперационная рана без признаков воспаления, отек отсутствует. Пациентка была активизирована на следующие сутки после выполненного тотального эндопротезирования левого тазобедренного сустава, обучена ходьбе с дозированной нагрузкой на оперированную конечность при помощи костылей, выписана на 3 сутки со дня операции в удовлетворительном состоянии.
При контрольном осмотре через год после операции: Результатом лечения пациентка довольна. VAS 0 баллов Опросник качества жизни SF-36 (95 баллов): Физический компонент здоровья: 45 баллов; Психологический компонент здоровья: 50 баллов.
Результаты и обсуждения
Представленные клинические наблюдения демонстрируют существенные различия в подходах к лечению диспластического коксартроза методами традиционного и робот-ассистирован-ного эндопротезирования. Анализ полученных результатов позволяет провести комплексную оценку возможностей современных технологий в ортопедической хирургии.
Сравнительный анализ двух клинических случаев выявляет принципиальные преимущества робот-ассистированной методики. Пациентка Б., получавшая лечение с применением системы MAKO Robot, продемонстрировала более быстрое восстановление функциональных показателей и качества жизни. Через год после операции оценка по шкале VAS составила 0 баллов против 2 баллов у пациентки А., лечившейся традиционным методом. Показатели качества жизни по опроснику SF-36 также свидетельствуют о превосходстве робот-ассистиро-ванной техники – 95 баллов против 80 баллов соответственно.
Полученные данные согласуются с результатами исследования А.Д. Герасенковой с соавт., которые установили, что отклонение в позиции компонентов от предоперационного плана при использовании роботизированной системы никогда не превышало 1° или 1 мм, в то время как при мануальной методике составило в среднем 2,7±1,0°. Такая высокая точность позиционирования компонентов эндопротеза непосредственно влияет на долгосрочные результаты лечения и снижает риск развития осложнений [11].
Особое значение имеет возможность трехмерного предоперационного планирования при робот-ассистированных вмешательствах. Как отмечают О.В. Пиманчев с соавт., создание трехмерной модели костных структур таза позволяет оптимизировать расположение компонентов эндопротеза и достичь практически идеального соответствия планируемых и фактических параметров. В представленном нами случае удалось точно восстановить длину конечности и офсет бедренной кости, что подтверждается контрольными исследованиями [12].
Анатомические особенности диспластического тазобедренного сустава, описанные В.В. Харченко с соавт., создают дополнительные технические сложности при эндопротезировании. Недоразвитие вертлужной впадины, изменение шеечно-диафизарного угла и нарушение центрации головки бедра требуют высокой точности хирургических манипуляций. Робот-асси-стированная система позволяет в режиме реального времени контролировать глубину посадки чашки с точностью до 1 мм и оптимизировать углы установки компонентов в различных проекциях [13].
Сокращение периода госпитализации также демонстрирует преимущества современной технологии. Пациентка Б. была выписана на третьи сутки после операции, в то время как при традиционном методе госпитализация составила 6 суток. Это согласуется с данными Д.А. Насирли, который отмечает сокращение периода реабилитации при использовании малоинвазивных технологий [14]. Необходимо учитывать период освоения робот-ассистированной методики. По данным А.Д. Герасенковой с соавт., для достижения оптимальных временных показателей при тотальном эндопротезировании тазобедренного сустава требуется выполнение 7 операций. Однако точность позиционирования компонентов остается стабильно высокой с первых вмешательств, что является критически важным фактором для долгосрочного успеха лечения [11].
Экономическая эффективность робот-ассистированного метода проявляется не только в сокращении сроков госпитализации, но и в снижении вероятности ревизионных вмешательств благодаря высокой точности первичной операции. Исследования Д.А. Дегтяревой и В.Г. Самодая подтверждают важность оптимизации хирургических подходов для улучшения функциональных результатов и снижения общих затрат на лечение [15].
Представленные результаты свидетельствуют о том, что робот-ассистированное эндопротезирование тазобедренного сустава при дисплазии обеспечивает более высокие стандарты точности, сокращает период восстановления и улучшает качество жизни пациентов. Внедрение данной технологии в клиническую практику представляется перспективным направлением развития современной ортопедической хирургии.
Выводы
Проведенное исследование робот-ассистированного эндопротезирования тазобедренного сустава при дисплазии убедительно демонстрирует значительные преимущества данной технологии перед традиционными методами хирургического лечения. Анализ ста операций, выполненных в период с 2023 по 2025 годы, подтверждает высокую эффективность применения системы MAKO Robot при коррекции диспластических изменений тазобедренного сустава. Применение роботизированной системы MAKO Robot позволяет значительно сократить длительность использования костылей пациентами в послеоперационном периоде по сравнению с мануальной техникой эндопротезирования.
Робот-ассистированная методика обеспечивает исключительную точность позиционирования компонентов эндопротеза с отклонением не более одного миллиметра и одного градуса от предоперационного плана. Такая прецизионность достигается благодаря трехмерному моделированию костных структур и интраоперационной навигации, что принципиально важно при работе с анатомически измененными структурами диспластического тазобедренного сустава. Возможность визуализации глубины посадки чашки и контроля степени костного покрытия в режиме реального времени позволяет оптимизировать результаты лечения и минимизировать риск развития осложнений. Существенным преимуществом робот-ассистированного подхода является значительное сокращение периода реабилитации пациентов. Длительность использования костылей после операции уменьшается с трех месяцев при традиционном методе до шести недель при применении роботизированной системы. Данное обстоятельство обусловлено меньшей травматичностью вмешательства и более точным восстановлением биомеханических параметров тазобедренного сустава, включая длину конечности и офсет бедренной кости.
Клинические результаты лечения демонстрируют превосходство робот-ассистированной технологии по всем оцениваемым параметрам. Болевой синдром через год после операции практически отсутствует у пациентов, оперированных с использованием роботизированной системы, в то время как при мануальной технике сохраняются остаточные болевые ощущения при повышенных нагрузках. Показатели качества жизни по опроснику SF-36 возрастают до 95 баллов против 80 баллов при традиционном подходе, что свидетельствует о более полном восстановлении функциональной активности пациентов.
Сокращение периода госпитализации с шести до трех суток и ускорение реабилитационного процесса обеспечивают не только медицинские, но и экономические преимущества робот-ассистированного метода. Снижение вероятности ревизионных вмешательств благодаря высокой точности первичной операции дополнительно подтверждает клиническую и экономическую целесообразность внедрения данной технологии.
Полученные результаты позволяют рекомендовать робот-ассистированное эндопротезирование в качестве метода выбора при лечении диспластического коксартроза. Внедрение данной технологии в широкую клиническую практику будет способствовать повышению стандартов ортопедической помощи и улучшению качества жизни пациентов с дисплазией тазобедренного сустава.
