Выбор математической модели походки человека для применения в реабилитационных устройствах

Автор: Вороной В. В., Верховод Д. П.
Журнал: Сибирский журнал клинической и экспериментальной медицины @cardiotomsk
Рубрика: Краткие сообщения
Статья в выпуске: 4 т.38, 2023 года.
Бесплатный доступ
В связи с прогрессированием заболеваний опорно-двигательного аппарата и роста количества травм позвоночника все большую актуальность приобретает применение многофункциональных реабилитационных комплексов отечественной разработки для функциональной терапии этих состояний.Цель исследования: анализ существующих моделей походки человека и выбор модели, подходящей для оптимального конструкторского и инженерного решения мехатронного реабилитационного комплекса, воздействующего на нижние конечности человека.Материал и методы. Проведен анализ существующих технических решений реабилитационных комплексов, краткий обзор основных подходов изучения походки человека, сделан выбор модели, приведено ее подробное описание для реализации в рамках разработки роботизированного реабилитационного комплекса функциональной терапии.Результаты. В результате проведенных исследований были получены данные о положении ног в процессе походки, проведена визуализация процесса ходьбы для выявления недостатков выбранной модели. Выбранная модель реализована в экспериментальном образце реабилитационного комплекса.Заключение. В дальнейшем необходимо доработать модель и провести сравнение с моделью, основанной на машинном обучении, и наиболее реалистичный вариант использовать в реабилитационных комплексах.
Математическая модель походки человека, реабилитация, функциональная терапия, восстановление двигательной активности
Короткий адрес: https://sciup.org/149144432
IDR: 149144432 | УДК: 616.8-009.18-036.82/.83-78:159.925.8:004.942 | DOI: 10.29001/2073-8552-2022-644
Selection of human gait mathematical model for use in rehabilitation devices
Due to musculoskeletal diseases progression and increase in spinal injuries, the use of domestically developed multifunctional rehabilitation complexes for functional therapy is becoming increasingly important.Aim: To analyze existing human gait patterns and select a suitable model for choosing the optimal design and engineering solution for a mechatronic rehabilitation complex, affecting the lower limbs of a person.Methodology and Research Methods. An analysis of existing technical solutions for rehabilitation complexes was carried out. Brief overview of the main approaches to studying human gait is provided. A model was selected; its detailed description is given for implementation for the robotic rehabilitation complex of functional therapy development.Results. As a result of the study, data on the position of the legs during gait was obtained and visualization of the walking process was carried out to identify the shortcomings for the selected model. The selected model is implemented in the experimental sample rehabilitation complex.Conclusion. In the future, it is necessary to refine the model and compare it with a model based on machine learning, and use the most realistic option in rehabilitation complexes.
Текст краткого сообщения Выбор математической модели походки человека для применения в реабилитационных устройствах
Высокие темпы развития современных медицинских технологий в мире требуют внедрения в российскую практику интеллектуального роботизированного оборудования, позволяющего вывести сферу здравоохранения на новый уровень. В связи с прогрессированием заболеваний опорно-двигательного аппарата пациентов, ростом травм позвоночника приобретает все большую актуальность реабилитационное оборудование. Разработка роботизированного реабилитационного комплекса для функциональной терапии нижних конечностей – это, с одной стороны, импортозамещение зарекомендовавшей себя зарубежной техники, а с другой – существенное ее развитие и расширение функционала на основе новых уникальных инженерных и научных подходов.
Достаточно молодым направлением современной медицины является клинический анализ биомеханических параметров и исследование патологии походки с использованием биомеханических моделей. Важность оценки функционального состояния опорно-двигательного аппарата, несомненно, актуальна для травматологических, ортопедических и нейрохирургических больных. Однако в настоящее время методы автоматического анализа походки и движения не получили широкого распространения и практически не внедряются в клиническую практику в отечественных лечебных учреждениях. Часто оценка функции врачом субъективна. Согласно исследованиям в области клинического анализа походки с применением специализированного оборудования, полученные данные могут быть использованы на всех этапах лечебного процесса таких пациентов. Поэтому применение анализа движений человека в травматологии и ортопедии очень важно.
В настоящее время существует множество вариантов моделирования походки как робота, так и человека. Большинство существующих моделей разработаны для различной мультипликации и не подходят для применения в реабилитационных комплексах, так как траектории движения не настолько гладкие, а при практической реализации в реабилитационных комплексах важны траектории, описываемые математическими уравнениями хотя бы до второй производной. Кроме того, данные модели ориентированы на динамических персонажей, а в нашем случае пациенты с заболеваниями опорно-двигательного аппарата обладают малой подвижностью, и высокая плавность движений очень важна в реабилитационных целях. Также существующие модели не предоставляются в открытом доступе, а дорогостоящие лицензии на их использование ограничены для применения в медицинских целях.
Цель исследования: выбор подходящей модели для оптимального конструкторского и инженерного решения мехатронного реабилитационного комплекса, воздействующего на нижние конечности человека с возможностью их перемещения по траекториям, имитирующим ходьбу.
Материал и методы
Текущие исследования в области биомеханики показывают, что она может предложить огромный неиспользованный потенциал в биомеханическом моделировании и симуляции. Математическое моделирование походки человека исходит из биомеханической системы, и соответствующая математическая модель используется для описания характеристик опорно-двигательного аппарата человека. Этот анализ предоставляет пользователям неограниченный доступ ко всем параметрам модели. В сочетании с анализом движений человека пользователи будут стремиться выявить конкретные отклонения, указав параметры модели, которые приводят к лежащей в основе патологии. В процессе принятия решений пользователи хотят оценить наиболее вероятный результат после конкретного терапевтического вмешательства и отрегулировать эти параметры таким образом, чтобы кодировать физиологические изменения, возникающие в результате конкретного вмешательства. Эффективность этого подхода зависит от достоверности моделирования двигательных систем и физиологических процессов человека, а также от того, как протекают сами процессы, порождающие движение.
В [1] полагают, что терапевтический эффект обусловлен генерацией сигналов периферической нервной системы, сходных с возникающими при ходьбе. Соответственно, мехатронный комплекс должен как минимум ассистировать периферической нервной системе человека.
В настоящее время принято [2] разделять существующие комплексы на две категории (рис. 1):
-
1) концевые приводы (в оригинале «end effectors»), которые механически соединены со ступнями пациента [3];
-
2) экзоскелеты, которые жестко закреплены на бедрах и голенях человека и обеспечивают перемещение конечностей [4, 5];
Схематически сравнение двух групп устройств показано на рисунке 1.
При выборе между представленными схемами авторы не располагали данными об эффективности возбуждения нервных окончаний конечностей и сравнении паттернов нейроактивности при различных механических воздействиях. Известны только сравнительные элек-тромиелографические данные при естественной и ас-систивной ходьбе [6], и в последнее время выполнены единичные работы [7], косвенным методом оценивающие нейроэффекты механостимуляции. Ориентируясь на сравнительные показатели возможностей их реализации и вероятных показателей удобства эксплуатации, а также учитывая габариты и массы комплексов, была выбрана общая кинематическая схема.
Далее выбор конструктивных решений приводов определяется требованиями к их кинематическим и динамическим параметрам: реализуемым траекториям движения конечностей, располагаемым скоростям и ускорениям. Из общих соображений [1] необходимо как минимум реалистичное воспроизведение паттерна ходьбы. Траектории и скорости движения ступней при ходьбе неоднократно изучены, например, в [8, 9, 18]. Нами ранее также были получены аналогичные данные, а также данные по кинематике ступней во время подъема и спуска по лестнице, перешагивания через препятствия. Эти виды локомоторной активности также должны ассистироваться комплексом. Дополнительное расширение диапазона перемещений и действующих усилий также может быть необходимо. Еще в [6] отмечались существенные различия при миелографическом анализе групп мышц нижних конечностей при использовании аппаратов Lokomat® (схема экзоскелета), Gait Trainer® (схема конечного привода) и при естественной ходьбе. При разработке нового реабилитационного комплекса необходимо адаптировать траектории движения ног с целью максимального приближения миелографического отклика к отклику при естественной ходьбе, что может потребовать значительного расширения диапазона перемещений. Современному уровню тренажеров соответствует, например, комплекс GEOL разработки REHA Technology [3].
Траектория шага жестко запрограммирована и регулируется только по длине и высоте, локомоторный паттерн показан на рисунке 2 (красная линия показывает траекторию центра стопы, синяя – угол поворота стопы в голеностопном суставе).
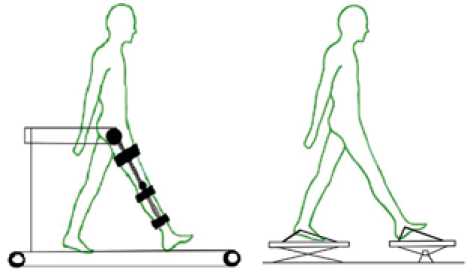
Рис. 1. Схематичное представление реабилитационных комплексов Fig. 1. Schematic view of rehabilitation complexes
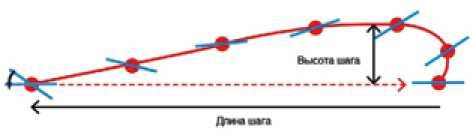
Рис. 2. Схема локомоторного паттерна
Fig. 2. Locomotor pattern diagram
На наш взгляд, при выборе диапазона перемещений для разрабатываемого тренажера не следует ограничивать его траекторией стопы при ходьбе с невысокой скоростью, менее 3 км/ч. Существует как минимум несколько соображений в пользу расширения диапазона линейных и угловых перемещений стоп.
Как было показано выше [6], ассистивное следование стандартной траектории ходьбы не обеспечивает воспроизведения паттерна мышечного тонуса и, вероятно, нейроотклика со стороны конечности. Регулирование тонуса скелетной мускулатуры, очевидно, потребует как расширения диапазона перемещений ступни, так и увеличения диапазона углов наклона (для дополнительного раздельного стимулирования сгибателей и разгибателей в разных фазах шага). Так, дополнительного изменения угла наклона стопы на ± 10 … 15 достаточно для «переключения» тонуса между передней и задней группами мышц голени [7].
Дополнение локомоторных траекторий паттернами подъема и спуска по лестнице, а также перешагивания через препятствие с сохранением равновесия потребует соответствующего увеличения высоты шага. Имитация невысокой (150–200 мм) ступени увеличивает потребную высоту рабочей зоны привода ступни как минимум до 350 мм. Измерение траекторий, выполненное в [6], подтверждает это значение. В работе [10] также проведена оценка необходимой скорости перемещения ног. Показано, что терапевтический эффект значимо улучшается при ассистировании ходьбы со скоростью до 1 м/с.
Исходя из вышесказанного, целесообразно расширить зону перемещения до высоты шага не менее 350 мм и обеспечить скорость перемещения ступней пациента, соответствующую паттерну ходьбы со скоростью до 3,5 км/ч.
Большая часть описанных в статьях моделей фокусируется на применении генерации походки к робототехнике, что приводит к появлению особенностей, не свойственных человеческой походке, например, отсутствию коленных суставов [13] или отсутствию ступней в модели [14].
Простейшая модель для изучения походки – обратный маятник. Эта модель предполагает, что центр масс движется за опорной ногой по арковидной траектории. Центр масс тела в этой модели соответствует грузу маятника, а центр давления на ступне – его опоре.
На рисунке 3 изображена схема данной модели и траектория движения центра масс. Модель состоит из невесомого стержня длины l , обозначающего ногу, и массы m , закрепленной на конце стержня, обозначающей центр масс человека.
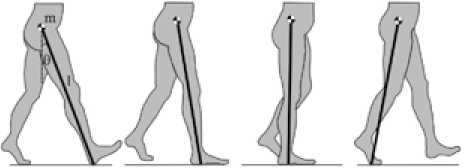
Рис. 3. Модель обратного маятника
Fig. 3. Reverse pendulum model
Баллистическая модель моделирует фазу переноса ноги. Исследование [16] показывает, что перемещение ноги вперед может быть совершено без сокращения мышц для создания механических сил – достаточно лишь набора кинематических условий и ограничений, таких как задание скорости перемещаемой ноги в момент поднятия носка.
На рисунке 4 продемонстрировано схематическое представление модели. Числа 1, 2 и 3 показывают положение модели при касании пятки, поднятии носка и следующем касании пятки соответственно. Каждая нога в данной модели представляется в виде твердого тела с распределенной массой.
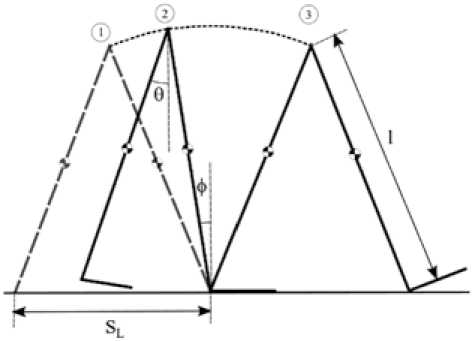
Рис. 4. Схема баллистической модели
Fig. 4. Ballistic model scheme
Результаты и обсуждение
Обычно реабилитационный комплекс представляет собой массивный фиксированный стол, условно разделяемый на две половины: плоский стол, на который крепится торс пациента, и экзоскелет, на который крепятся ноги. Микроконтроллер подает сигналы на экзоскелет, меняя положение ног. Предполагается, что экзоскелет будет имитировать реальную походку, тем самым помогая пациенту вновь обрести навыки ходьбы. Подобные методы активно изучаются врачами и применяются на практике [11, 12].
Для реализации в реабилитационном аппарате может быть выбрана модель, описанная в статье [15], поскольку она позволяет задать множество антропологических параметров, а также моделирует поворот ступней. В выбранной модели ноги человека представлены в виде соединенных между собой отрезков (рис. 5). Голова, руки и туловище для удобства представляются в виде единого целого. Предполагается, что человек не машет руками при ходьбе слишком сильно [17]. Такая модель считается хорошим компромиссом между сложностью и реалистичностью.
Цикл шага состоит из четырех фаз:
От касания пола правой пяткой ( RHS , от англ. rightheel-strike ) до отрыва левого носка ( LTO , от англ. left-toe-off ). Правая пятка и левый носок опираются на пол.
От LTO до касания правым носком ( RFF , от англ. rightfoot-flat ). Только правая нога опирается на пол.
RFF . Правая нога не двигается, оставшиеся 6 сегментов опираются на правую ногу.
От отрыва правой пятки ( RHO , англ. right-heel-off ) до касания левой пятки. Только правый носок опирается на пол.
Разные фазы шага описываются двумя различными математическими моделями. Первая модель описывает фазу 1, в которой 6 переменных, описывающих ноги, зависимы друг от друга. Фазы 2, 3 и 4 между собой различаются незначительно, положение ног описывается с помощью углов относительно уровня пола.
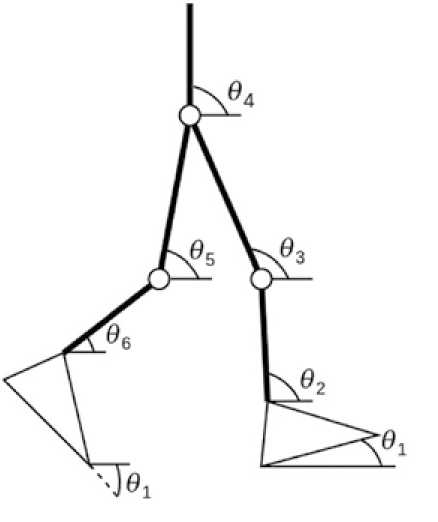
Рис. 5. Визуальное представление модели ног
Fig. 5. Leg model visual representation
Выбранная модель реализована в экспериментальном (опытном) образце реабилитационного комплекса. Предполагается, что экзоскелет будет имитировать реальную походку, тем самым помогая пациентам, перенесшим травмы либо инсульт, вновь обрести навыки ходьбы.
В дальнейшем можно провести сравнение с моделью, основанной на машинном обучении, и наиболее реалистичную использовать в реабилитационных комплексах, воздействующих на нижние конечности человека.
Заключение
В результате проведенных исследований были получены данные о положении ног в процессе походки, проведена визуализация процесса ходьбы для выявления недостатков выбранной модели. В настоящее время выбранная модель реализована в экспериментальном образце реабилитационного комплекса, воздействующего на нижние конечности человека и находится в стадии доработки как механической части комплекса, так и программной.
Список литературы Выбор математической модели походки человека для применения в реабилитационных устройствах
- Fuchs E., Flügge G. Adult neuroplasticity: more than 40 years of research. Neural. Plast. 2014;2014:541870. https://doi.org/10.1155/2014/541870.
- Cheng P.-Y., Lai P.-Y. Comparison of exoskeleton robots and end-effector robots on training methods and gait biomechanics. Intelligent Robotics and Applications: 6th International Conference, ICIRA 2013, Busan, South Korea, September 25-28, 2013, Proceedings, Part I 6. Springer; 2013: 258-266. https://doi.org/10.1007/978-3-642-40852-6_27.
- REHA Technology G-EOL Brochure. Electronic resource. URL: https://rehatechnology.com/wp-content/uploads/181130a_Brochure_G-EOL_En_Web_cm_in.pdf (16.11.2023).
- Hocoma Lokomat Pro. Functional Robotic Gait Therapy. URL: https://www.hocoma.com/solutions/lokomat (17.11.2023).
- Motorika High-Level Gait Training Platform - ReoAmbulator. URL: https://motorika.com/reoambulator (17.11.2023) .
- Morone G., Iosa M., Tamburella F., Muzzioli L., Pisotta I., Moreno J.C. et al. An EMG pattern comparison of exoskeleton vs. end-effector robotic device for assisted walking training. In book: Replace, Repair, Restore, Relieve - Bridging Clinical and Engineering Solutions in Neurorehabilitation: Proceedings of the 2nd International Conference on NeuroRehabilitation (ICNR2014), Aalborg, 24-26 June, 2014. Springer; 2014:563-567. https://doi.org/10.1007/978-3-319-08072-7_82.
- Simis M., Sato J.R., Santos K., Fregni F., Battistella L.R. Using functional near infrared spectroscopy (FNIRS) to assess the effect of transcranial direct-current stimulation (TDCS) on spinal cord injury patient, during robot-assisted gait. Ann. Phys. Rehabil. Med. 2018;61(Suppl.):e80-e81. https://doi.org/10.1016/j.rehab.2018.05.172.
- Cunningham D.A., Rechnitzer P.A., Pearce M.E., Donner A.P. Determinants of self-selected walking pace across ages 19 to 66. J. Gerontol. 1982;37(5):560-564. https://doi.org/10.1093/geronj/37.5.560.
- Fang J., Vuckovic A., Galen S., Conway B.A., Hunt K.J. Foot trajectory approximation using the pendulum model of walking. Med. Biol. Eng. Comput. 2014;52(1):45-52. https://doi.org/10.1007/s11517-013-1117-7.
- Козлов В.И. (ред.). Анатомия человека: учеб. для студ. инст. физ. культ. Москва: Физкультура и спорт; 1978:187.
- Bortole M., del-Ama A.J., Rocon E., Moreno J.C., Brunetti F., Pons J.L. A robotic exoskeleton for overground gait rehabilitation. 2013 IEEE International Conference on Robotics and Automation. IEEE; 2013:3356-3361. https://doi.org/10.1109/ICRA.2013.6631045.
- Beyaert C., Vasa R., Frykberg G.E. Gait post-stroke: Pathophysiology and rehabilitation strategies. Neurophysiol. Clin. 2015;45(4-5):335-355. https://doi.org/10.1016/j.neucli.2015.09.005.
- Asano F., Yamakita M., Kamamichi N., Luo Z.-W. A novel gait generation for biped walking robots based on mechanical energy constraint. IEEE Transactions on Robotics and Automation. 2004;20(3):565-573. https://doi.org/10.1109/TRA.2004.824685.
- Rokbani N., Alimi A. M. IK-PSO, PSO inverse kinematics solver with application to biped gait generation. International Journal of Computer applications (IJCA). 2012;58(22):33-39. https://doi.org/10.48550/arXiv.1212.1798.
- Onyshko S., Winter D.A. A mathematical model for the dynamics of human locomotion. J. Biomech. 1980;13(4):361-368. https://doi.org/10.1016/0021-9290(80)90016-0.
- Mochon S., McMahon T.A. Ballistic walking. J. Biomech. 1980;13(1):49-57. https://doi.org/10.1016/0021-9290(80)90007-x.
- Cavagna G.A., Kaneko M. Mechanical work and efficiency in level walking and running. J. Physiol. 1977;268(2):467-481. https://doi.org/10.1113/jphysiol.1977.sp011866.
