Выбор места расположения датчика обледенения и датчика полного давления в условиях обледенения

Автор: Нгуен Н. Ш.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 1 (53) т.14, 2022 года.
Бесплатный доступ
Датчик обледенения и датчик полного давления играют ключевую роль при обеспечении безопасности полетов гражданского самолета. Предлагается численный метод определения зоны возможного расположения этих датчиков для выполнения требования по устойчивости их работы в условиях обледенения. Приведены примеры на модели самолета CRM.
Датчик обледенения, датчики полного давления, система уравнений водности
Короткий адрес: https://sciup.org/142234873
IDR: 142234873 | УДК: 533.6 | DOI: 10.53815/20726759_2022_14_1_3
Selection of the location of the ice detector and the total pressure probe in icing conditions
The ice detector and the total pressure probe play a key role in ensuring Civil Aviation Safety. A numerical method is proposed for determining a zone of possible deployment of these sensors to meet the requirements for their self-sustainability in icing conditions. Examples of the CRM aircraft model are given.
Текст научной статьи Выбор места расположения датчика обледенения и датчика полного давления в условиях обледенения
Обледенение самолета, является чрезвычайно актуальной проблемой при обеспечении безопасности полетов. Появление ледяного слоя изменяет форму обтекаемых поверхностей, портит их аэродинамическую форму и, как следствие, уменьшает подъемную силу, увеличивает сопротивление, ухудшает управляемость и устойчивость. Кроме этого, обледенение может вызвать неточность или даже отказ в работе датчиков, приборов, агрегатов и нарушить режим работы двигателя. Для предотвращения этих негативных эффектов используется противообледенительная система (ПОС), индикатором включения которой является датчик обледенения (ДО). ДО должен дать сигнал включения ПОС до того, как на. участках внешней поверхности самолета, или на. входе в воздухозаборник двигателя, защищенных ПОС, образуются ледяные наросты недопустимого размера. Для этого скорость нарастания льда. на. ДО должна, быть быстрее, чем на. других местах. Конструкция ДО позволяет это сделать, но место расположения ДО необходимо выбирать так, чтобы на ДО попадало достаточное количество воды из набегающего потока, и статическая температура, в этом месте приблизительно равнялась температуре окружающей среды [1]. К другим датчикам системы воздушных сигналов, таким как датчик полного давления (ДПД), предъявляются требования по устойчивости их работы в условиях обледенения. Трубка ДПД должна
«Московский физико-технический институт (национальный исследовательский университет)», 2022
располагаться вне пограничного слоя и местный угол атаки на выбранном месте должен находиться в заданном допустимом диапазоне. Для работы в условиях обледенения на ДПД работает электрообогрев. Тем не менее желательно выбирать место расположения так, чтобы трубка ДПД находилась вне «зоны повышенной водности» и избегать появления «барьерного льда» перед ней, который приводит к искажению характеристик потока воздуха.
Численный метод моделирования движения водяных капель позволяет решать задачу выбора места размещения ДО и ДПД на раннем этапе проектирования самолета. Для моделирования движения капель могут использоваться метод Лагранжа [2] и метод Эйлера [3]. В работе [4] автор разработал метод Годунова для решения системы Эйлера движения капель (система водности). На этой основе была разработана численная программа на неструктурированной сетке, основанная на методе конечного объема. Эта программа используется для получения результатов в данной работе.
2. Методология предварительного выбора места расположения датчиков обледенения
Существует много типов датчика обледенения, различающихся принципом работы: механический (вибрационный), пневматический, электротермический, оптический... Самым надежным из них считается механический вибрационный. Довольно широко используют ДО Goorich (рис. 1). Часть датчика, прилегающая к поверхности самолета, имеет форму профиля высоты 40 мм, что позволяет чувствительной головке (зонд) цилиндрической формы диаметром 6,35 мм и длиной 25,4 мм находиться вне пограничного слоя. Зонд сделан из сплава никеля. Он вибрирует под магнитострикционным эффектом с собственной резонансной частотой 40 кгц. Как только толщина ледяного слой на ДО достигает 0.5±0.13 мм, частота уменьшается на 133 гц из-за увеличения массы и срабатывает сигнализация.
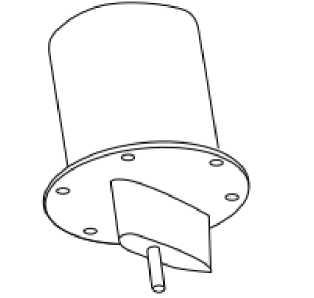
Рис. 1. Внешний вид датчика, обледенения
Для выбора, места, расположения ДО необходимо проводить расчеты для всей области ожидаемых условий эксплуатации в условиях обледенения [1]. В таблице 1 приведен список расчетных режимов для регионального самолёта. Условия окружающей среды заданы по условиям Международной стандартной атмосферы (ISA).
Рассматривается поле водности с каплями разного размера:
MV D = 10, 20, 35, 50,100 мкм.
Важным параметром для обработки данных является локальная относительная водность (RLWCY которая представляется отношением локальной водности (р) и водности в набе гающем потоке (LWC):
RLWC =
Р
LWC"
Таблица 1
Список расчетных режимов
|
Фаза палета |
Число M |
Скорость (KTAS) |
Угол атаки (град.) |
Высота [ft] |
|
Takeoff |
0.227 |
150 |
-1.0 |
0 |
|
Takeoff |
0.227 |
150 |
14.0 |
0 |
|
Hold |
0.57 |
347 |
0.5 |
22 000 |
|
Hold |
0.57 |
347 |
3.25 |
22 000 |
|
Hold |
0.57 |
347 |
6.0 |
22 000 |
|
Cruise |
0.81 |
477 |
0.5 |
30 000 |
|
Cruise |
0.81 |
477 |
3,25 |
30 000 |
|
Cruise |
0.81 |
477 |
6.0 |
30 000 |
Для проверки влияния величины абсолютной водности в набегающем потоке на значение RLWC проведена серия расчетов обтекания NACA23012 со скоростью V^ = 78.2 м/с. Размер капель задавался равным 20 мкм, водность набегающего потока варьировалась и равнялась LWC = 0.5,1.0, 2.0, 4.0 г/м3. Использовалась расчетная О-сетка.
На рис. 2 представлены поле RLWC и зависимость от водности невозмущенного потока в сечении ж = 0.1. Численные результаты показывают, что RLWC практически не зависит от водности в набегающем потоке. Для всех дальнейших расчетов задана водность набегающего потока 1 г/м3.
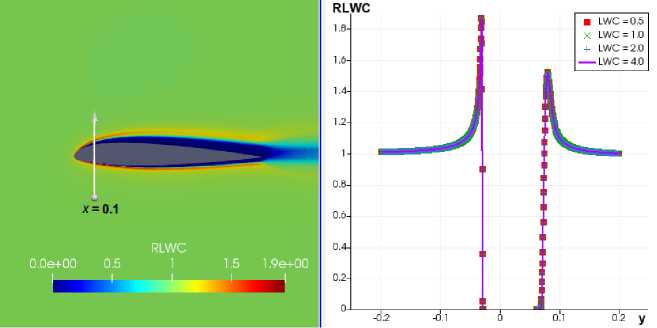
Рис. 2. Поле относительной водности вокруг NACA23012
В качестве самолета рассматривается модель CRM (NASA Common Research Model) без мотогондолы. Сетка загружена с сайта NASA. Размах крыла модели составляет 59 м. Сетка неструктурированная, количество ячеек 7 618 735 (рис. 3).
В качестве примера рассмотрим режим полета Hold (табл. 1) с углом атаки 3.25 градуса и размером водяных капель 20 мкм. Главными областями попадания капель являются носовая часть фюзеляжа, передняя кромка крыла и стабилизатора. На рис. 5 представлено поле относительной водности вокруг фюзеляжа в разных сечениях. Видно (рис. 2, 4), что на носике тела капли движутся вдоль тела, а затем вниз по течению отрываются от него, образуя «зону затенения». В этих местах водность очень мала, образуется пустой слой (синий цвет). На границе этого слоя водность повышается, образуя «зону повышенной водности» (красный цвет), а затем водность уменьшается до значения в набегающем потоке (зеленый цвет).
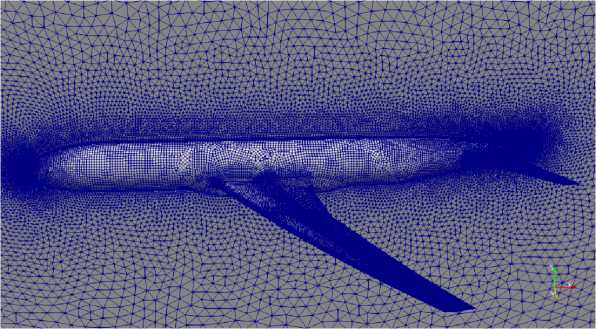
Рис. 3. Расчетная сетка, модели CRM
Рассмотрим относительную водность вдоль горизонтальной линии z = 5.3 в разных сечениях на носовой части фюзеляжа ж = 3, 4, 5 (рис. 4). На рис. 5 показаны зависимость RLWC от расстояния до поверхности фюзеляжа и положение зонда датчика обледенения на. расстояние от 40 мм до 65.4 мм. Видно, что в случае крупных капель область попадания больше, чем в случае маленьких. Это объясняется тем, что из-за большой инерции движение больших капель меньше зависит от потока, воздуха. Для маленьких капель область попадания закачивается до сечения ж = 3, для капель размера 50 мкм сечение ж = 3 ещё находится в этой области, а для капель размера 100 мкм - ж = 5. Толщины пристенного слоя нулевой водности разные в разных случаях. Если в случаях М VD = 10 и 100 мкм положение чувствительного зонда, датчика, обледенения находится в зоне повышенной водности, где RLWC > 1, то в остальных случаях он может попасть в зону малой водности, где RLWC < 1. Такой случай опасен, так как тогда скорость нарастания льда на датчике с большой вероятностью будет меньше, чем на местах, защищенных ПОС.
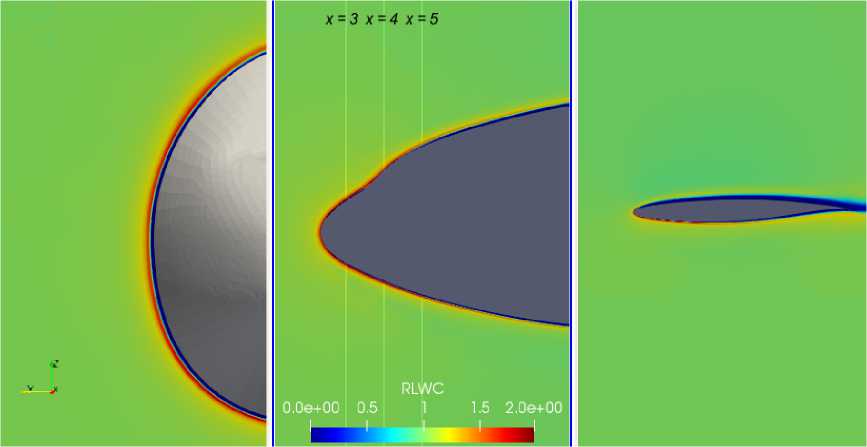
Рис. 4. Поле водности вокруг фюзеляжа.
На рис. 6 представлено поле относительной водности с каплями размера. 35 мкм на. расстоянии L = 40.0, 52.7, 65.4 мм от фюзеляжа, что соответствует началу, центру и концу цилиндра, датчика, обледенения. Это поле нарисовано с помощью программы Paraview [5]. Для этого в результате расчета, кроме локальной водности и скорости капель, необходимо сохранить расстояние до стенки dW(l//. Как показано на рис. 5, есть три главных типа профиля относительной водности на. цилиндре ДО: постояная, монотонная и выпуклая.
Поэтому, чтобы проверить условие RLWC > 1 на цилиндре, достаточно проверить его на начале и на конце цилиндра. С другой стороны, выполнение условия, например, RLWC < 3 на начале и конце цилиндра ДО не гарантирует его выполнение на участке между ними, так как на нем относительная водность может быть больше трех. Поэтому надо проверить это условие в середине цилиндра датчика. Но и это не гарантирует выполнение условия проверки на других местах цилиндра. Для повышения точности можно дополнительно проверить выполнение условия на 1/4 и 3/4 цилиндра датчика. Такой подход оказывается не точным и не эффективным.
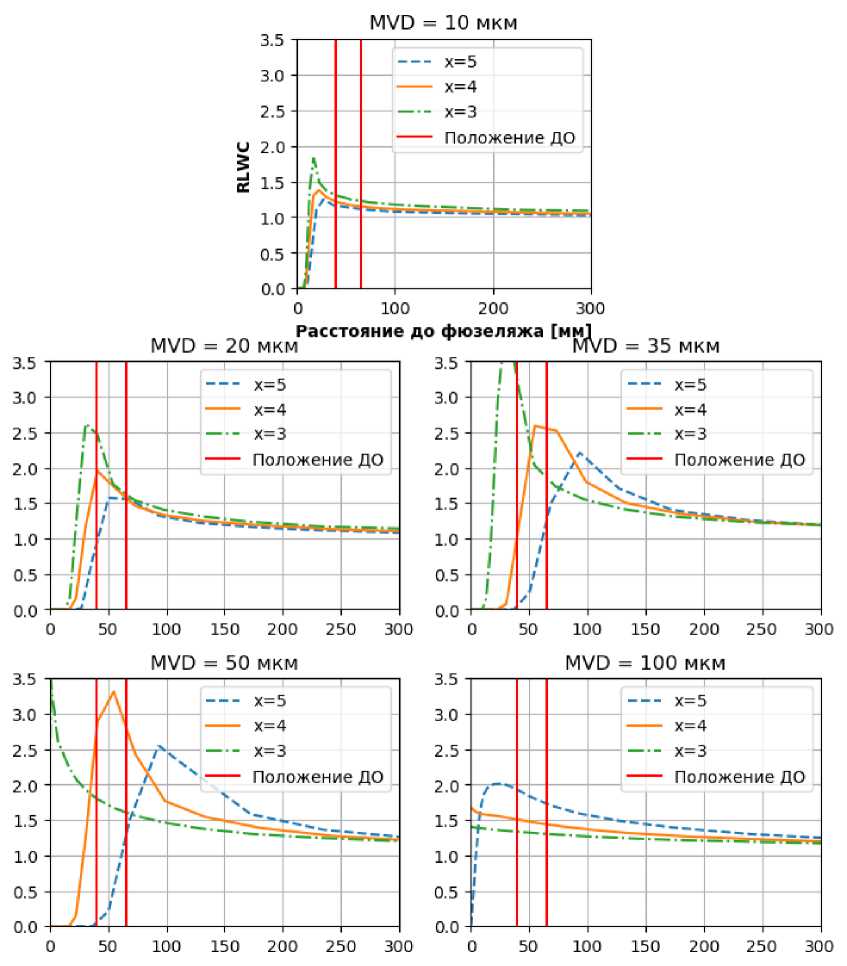
Рис. 5. Относительная водность на. расстоянии от фюзеляжа.
Для определения зоны возможного размещения ДО предлагаем использовать среднюю относительную водность на цилиндре (ARLWC), которая определяется по формуле
ARLWC = 1 [ Е RLWC dl,
Le - Ls J La где Ls = 40.0, Le = 65.4 мм.
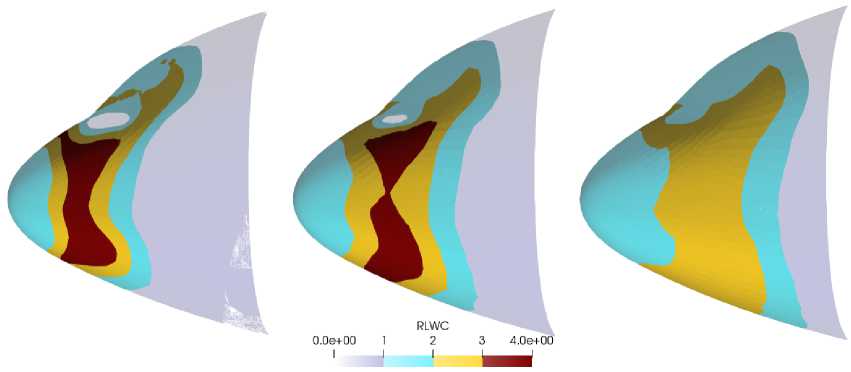
Рис. 6. Относительная водность на расстоянии L = 40.0, 52.7, 65.4 мм, MV D = 35 мкм
Интегрирование осуществляется численно, например, методом трапеций:
ARLWC =
N - 1
тV (RLWC (Д) + RLWC (Д+1)), Le Ls 2 .
i=1
где
AL =
Le — Ls N — 1 ’
N - число точек, расположенных равномерно вдоль цилиндра, Li - соответственно их расстояние до фюзеляжа. Водность в этих точках вычисляется следующим образом:
-
1. В центре грани пристенной ячейки на поверхности самолета с координатами X s опре-
- —— деляется нормальный вектор к поверхности п.
-
2. Координаты точки на цилиндре ДО определяются по формуле Хр = X s + Li • —.
-
3. Определяется ячейка расчетной сетки, в которой находится рассматриваемая точка путем поиска наименьшего расстояния между точкой и центром каждой ячейки WdX W = цХр — XcW. —
-
4. Вычисляется водность в точке по формуле рр = рс + Vpc • dX , где V рс - градиент водности в центре ячейки.
— —
Третий шаг требует большого количества времени, поэтому зона поиска ограничивается носовой частью с помощью условия Х.ж() < ж*.
Таким образом, на фюзеляже можно определить поле средней относительной водности на цилиндре ДО. На рис. 7 представлено такое поле в случае MVD = 35 мкм, с количеством точек N = 20. Это поле используется для определения зоны возможного расположения ДО.
Допустим следующие требования к поиску места положения датчика обледенения:
ж < 6; 1 < ARLWC < 3.
Первое ограничение ж < 6 связано с тем, что при ж > 6 ДО может попасть в «зону затенения», что неприемлемо. Такое условие может дополнительно уменьшить зону поиска и ускорить процесс определения областей рационального расположения ДО. Условие A RLWC > 1 гарантирует, что на ДО попало достаточное количество воды из набегающего потока. Ограничение ARLWC < 3 ставится для того, чтобы уменьшить чрезмерную частоту вызова ПОС, что не выгодно с точки зрения экономии энергии. Используя Paraview для визуализации поля ARLWC, можно наглядно изобразить подходящие области. На рис. 8 представлены найденные области и изолинии для случаев MVD = 20, 35, 50 мкм. Пересечение этих областей является зоной возможного размещения ДО на данном рассматриваемом режиме полета (рис. 9).
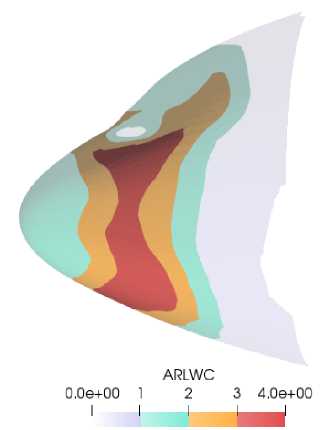
Рис. 7. Средняя относительная водность, MVD = 35 мкм
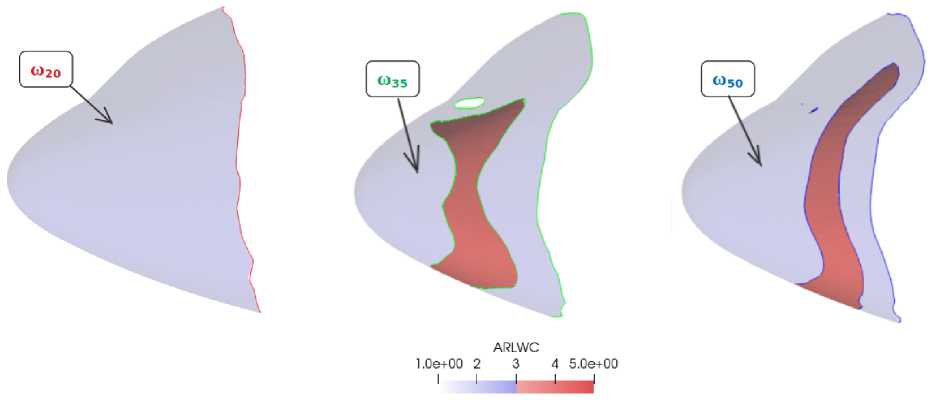
Рис. 8. Подходящие области 1 < ARLW С < 3 пр и MVD = 20, 35, 50 мкм
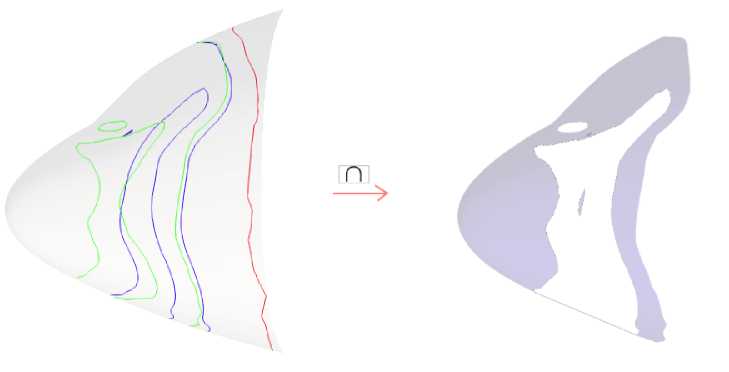
Рис. 9. Пересечение найденных областей
Аналогично для других размеров капель, в конечном результате, пересечение всех найденных областей является зоной возможного размещения для данного режима полета ДО. Таким образом, для каждого режима полета подходящая область определяется как
^Кг = Ш10 О Ш20 О Ш35 О W50 О Шщо-
Проводя данную процедуру для всех режимов, получаем зону возможного размещения ДО:
^ = ^R1 О ^R2 О ... О ^RN .
3. Выбор места расположения датчиков системы воздушных сигналов
Существует достаточно большое количество работ, в которых рассматриваются вопросы допустимых границ расположения датчиков воздушных сигналов (ДВС) [1], [6]. В этих работах основное внимание уделяется таким факторам, как отсутствие отрывов, возможность построения простых и надежных аппроксимационных зависимостей между локальными параметрами и параметрами набегающего потока и т.д. В этом случае датчики системы воздушных сигналов и, в частности, датчики полного давления обычно находятся в передней части фюзеляжа под кабиной экипажа [1], [6] (рис. 10). Такой выбор места расположения датчиков обеспечивает выполнение стандартных требований к их установке.
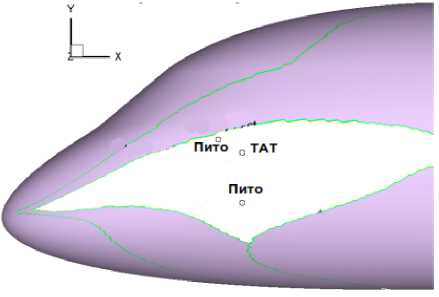
Рис. 10. Зона, возможного размещения ДПД [1]
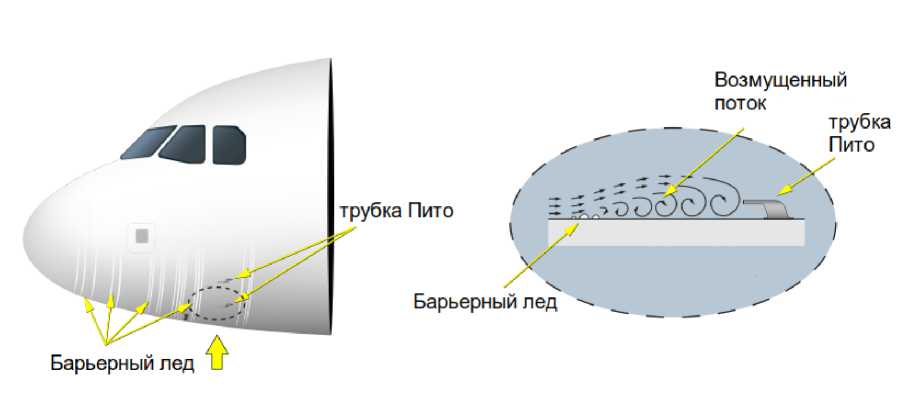
Рис. 11. Эффект влияния «барьерного льда» на. показания ДПД [6]
В данном разделе рассматриваются дополнительные ограничения размещения датчиков воздушных сигналов для выполнения требований по устойчивости работы в условиях обледенения. Можно выделить две разнотипные проблемы.
-
1. Влияние барьерного льда, возникающего при обогреве кабины экипажа, на показания датчика полного давления. Данная проблема рассмотрена в работе [7]. «Барьерный лед» может появиться на носовой части фюзеляжа перед взлетом, когда самолет находится в условиях наземного обледенения, или даже при полете и после полета. Возможной причиной данной ситуации являются неудаление снежно-ледяных отложений на передней части фюзеляжа перед взлетом, таяние снега от обогрева остекления кабины пилотов при отрицательной температуре наружного воздуха. Образование «барьерного льда» перед датчиками полного давления приводит к искажению воздушного потока (рис. 11) и, как следствие, к недостоверным данным о воздушной скорости.
-
2. Но при таком расположении возникает другая проблема: датчики могут находиться в зоне повышенной водности, что приводит к сильному обледенению датчиков. Как показано в задаче выбора места размещения датчика обледенения, толщина зоны повышенной водности уменьшается вблизи носовой части фюзеляжа. Поэтому, если датчик воздушного давления достаточно высокий, его зонд будет находиться в набегающем потоке вне зоны повышенной водности.
Неверные показания ДПД из-за образования «барьерного льда» перед ними приводят к отключению многих авиационных систем, в том числе автопилота [7], что очень опасно при плохих погодных условиях или в случае слабо обученного экипажа. Чтобы уменьшить вероятность появления такой ситуации, предлагается размещать датчики давления на носовой части перед кабиной экипажа.
В качестве примера рассмотрим датчики компании Collins Aerospace. Для измерения полного давления можно использовать три типа датчиков: датчик полного давления (ДПД, Pitot Probe, модель 0851 ДПД), датчик полного статического давления (ДПСД, Pitot-Static Probe, модель 0856 ДПСД), многофункциональный датчик (МФД, Multi-Function Probe, 0858 МФД). Последний датчик предназначен для определения разных параметров, таких как полное и статическое давление, угол атаки и угол скольжения (рис. 12). Высота этих датчиков соответственно равна 67.0, 150.0 и 137.0 мм.

Рис. 12. Внешний вид датчиков полного давления
Посмотрим обтекание модели CRM на режиме полета Hold (табл. 1) с углом атаки 3.25 градусов и размером водяных капель 20 мкм. Будем рассматривать относительную водность в разных сечениях, имеющих координаты ж = 3,4, 5. Положение датчиков давления в поле водности с разными размерами капель MV D = 10, 20, 35, 50, 100 мкм представлено на рис. 13. На рис. 14 показано поле относительной водности в случае MVD = 35 мкм на расстояниях L = 67.0,137.0,150.0 мм от фюзеляжа, что соответствует положению приведенных выше датчиков. Видно, что ДПД с небольшой высотой часто попадает в зону повышенной водности. Датчики ДПСД и МФД с большей высотой находятся за границей зоны повышенной водности и чем ближе к носовой части фюзеляжа, тем лучше оказывается их положение.
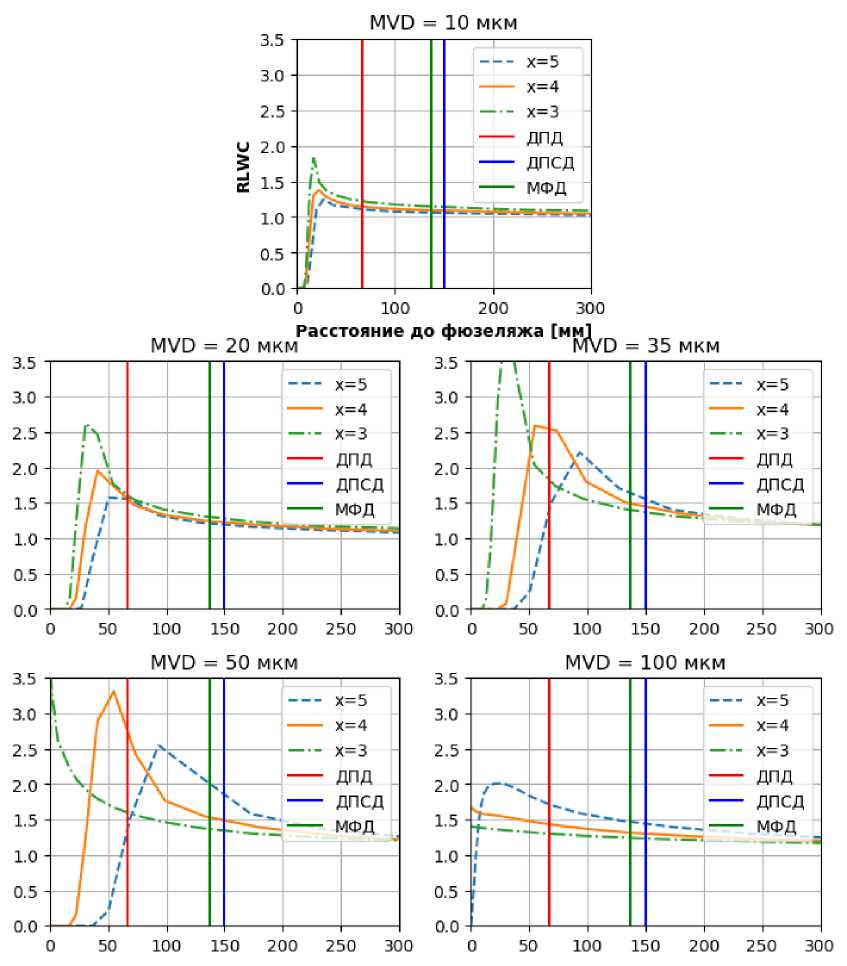
Рис. 13. Положение ДПД
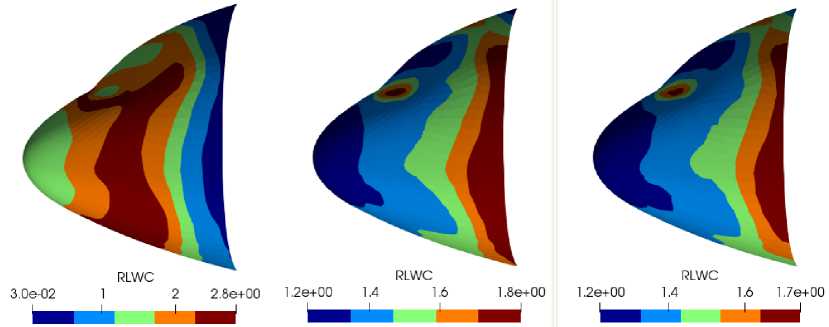
Рис. 14. Поле RLWC на расстояниях L = 67.0,137.0,150.0 мм от фюзеляжа
4. Заключение
-
1. Использование разработанной программы на основе численного метода моделирования поля водности [4] с помощью вышеописанной упрощенной методологии позволяет определить зону возможного расположения датчика обледенения на раннем этапе проектирования самолета. Методология состоит из следующих шагов:
-
• Расчет поля воздуха и поля водности для расчетных режимов самолёта (таблица 1).
-
• Определение полей средней по датчику ДО относительной водности и их проекция на поверхность самолета.
-
• Определение зон возможного размещения ДО для типового набора размеров капель и каждого режима полета (табл. 1).
-
• Поиск пересечения найденных областей, что является итоговой зоной возможного размещения ДО.
-
2. Размещение датчиков полного давления с большой высотой (ДПСД, МФД) вблизи носовой части фюзеляжа перед кабиной экипажа уменьшает вероятность образования «барьерного льда» перед ними, их зонд находится вне зоны повышенной водности и вне пограничного слоя.
Список литературы Выбор места расположения датчика обледенения и датчика полного давления в условиях обледенения
- Шевяков В.И. Разработка теоритических основ и практических методов реализации аэродинамического совершенства самолетов транспортной категории с учетом выполнения сертификационных требований по безопасности полета: диссертация на соискание ученой степени доктора технических наук, МГТУ ГА. 2017.
- Trontin P., Kontogianis A., Blanchard G., Villedieu P. Description and assessment of the new ONERA2D icing suite IGLOO2D // AIAA Paper. 2017-3417. 2017.
- Bourgault Y., Habashi W.G., Dompierre J., Baruzzi G.S. A Finite Element Method Study of Eulerian Droplets Impingement Models // International Journal for Numerical Methods in Fluids. 1999. V. 29.
- Нгуен Н.Ш. Численный метод ля модели Эйлера движения переохлажденных капель в условиях обледенения // Труды МФТИ. 2021. Т. 13, № 3.
- ParaView 5.6. The ParaView Guide. Kitware Inc., 2019.
- Зленко Н.А. Определение границ допустимых областей установки датчиков системы воздушных сигналов // Ученые записки ЦАГИ. 2018. Т. XLIX, № 3. C. 54-67.
- Airbus. Look out for Ice Ridges on the Lower Nose Fuselage. Airbus Safety first. 2018.
