Выбор местоположения станций при наземном лазерном сканировании зданий и сооружений

Автор: Ворошилов Александр Прокопьевич, Караченцев Юрий Анатольевич
Рубрика: Экспертиза и оценка объектов недвижимости
Статья в выпуске: 16 (149), 2009 года.
Бесплатный доступ
Рассмотрены точностные характеристики процесса наземного лазерного сканирования для целей планирования местоположения станций и производства съемки зданий и сооружений сканирования.
Наземное лазерное сканирование зданий и сооружений, лазерный сканер, планирование работ, геодезическая съемка
Короткий адрес: https://sciup.org/147154209
IDR: 147154209 | УДК: 528.7
Choice of station location at surface laser scanning of buildings and constructions
The article considers the precision characteristics of the process of surface laser scanning for the purpose to plan the station location and to survey the buildings and constructions of scanning.
Текст научной статьи Выбор местоположения станций при наземном лазерном сканировании зданий и сооружений
Для съемки пространственного положения строительных объектов и их конструкций наиболее перспективны в настоящее время наземные лазерные сканирующие системы. Сканирование, управляемое специальной программой с компьютера, производится с высокой скоростью и большой плотностью снятых точек. Обеспечивает определение пространственных координат х, у, z с хорошей точностью. Это позволяет проводить необходимые измерения по облаку точек, импортировать данные в системы автоматизированного проектирования, выявлять деформации и смещения элементов конструкций.
При съемке сканер устанавливается на специальном устойчивом штативе на выбранных заранее станциях. Для сканирования сложных объектов применяют систему станций, что позволяет при последующей обработке объединить отдельные сканы в общее облако точек. На рис. 1 показаны шесть станций лазерного сканирования объекта: «Фасад северной трибуны стадиона Центральный» г. Челябинск.
Выбор местоположения станций относительно сканируемого объекта является одним из основных факторов подготовительных работ, определяющих точность сканов и их соответствие требованиям к геодезическим съемкам пространственных конструкций. Вместе с тем, к настоящему времени нет научно обоснованных рекомендаций по этому поводу.
Рис. 1. Фасад северной трибуны
-
1. Факторы, влияющие на точность сканов
При выборе положения станций относительно снимаемого объекта необходимо учитывать комплекс факторов:
-
- точностные характеристики сканирования и последующего определения пространственных координат точек;
-
- удаление станций от снимаемых объектов;
-
- размеры зон сканирования по горизонтали и по вертикали;
Ворошилов АЛ., Караченцев Ю.А.
-
- обеспечение зон перекрытий соседних сканов;
-
- увеличение детальности и точности сканирования на отдельных фрагментах зон;
-
- «видимость» и доступность для сканирования, отсутствие помех для сканирующего лазерного луча;
-
- коэффициент отражения снимаемой поверхности.
-
2. Точностные характеристики сканирования
Учет этих факторов зависит от расположения объекта, его высоты, требуемой точности, загруженности деталями, наличия свободных площадей на прилегающих территориях. Однако при точных работах особое внимание должно быть уделено точностным характеристикам сканирования.
В технических характеристиках сканеров обычно указывается точность измеряемого им расстояния, фиксации горизонтального и вертикального углов, определения пространственного положения точки на определенном расстоянии (например, на 50 м для сканеров Leica Geosystems). Каких-либо других оценок и расчетных формул не приводится.
Пространственные координаты снимаемой точки г объекта в заданной системе определяются по формулам:
-
X, = хс+2), cos(a0+Д);
-
У, = ус + Dj sin(a0 + Д ); (1)
z, = zc+Sisinvl -vlc, где xc, yc, zc - пространственные координаты станции в условной или геодезической системе координат; а0 - дирекционный угол начального направления; 8Х - наклонное расстояние; Dt - горизонтальное расстояние; Д - горизонтальный угол между начальным и снимаемым на точку направлением луча сканера; vt - угол наклона луча сканера; 1С - высота сканера над точкой станции.
Средняя квадратическая погрешность (СКП) планового положения точки г определяется на базе формул (1). Так как х, и у, являются функциями измеренных расстояний S и заданных углов поворота Д сканирующего луча, то после дифференцирования выражений (1) получим: / х2
Шх. = тХ ^mD COs2 Pi + ( “ ] S^2 Pi^P7
mX = ^C + ^ ЫН2 Pi +II cos2 Pi^p '
где mXc, тУс - СКП координат станции; mD - СКП измерения расстояний; тр - СКП углов Д; р = 206265”.
Приведенные оценки выполнены для одиночных станций. При увязке стоянок прибора в одну
Выбор местоположения станций при наземном лазерном сканировании зданий и сооружений систему координат и объединении сканов в единые области точек, погрешности тх и ту возрастут из-за влияния погрешностей определения координат станций и погрешностей сшивки сканов. Вместе с тем, данные табл. 1 позволяют так подобрать местоположение станций прибора, чтобы координаты снятых точек были определены достаточно точно.
Таблица 1 Средние квадратические погрешности плановых координат при сканировании
|
D, м |
тх, мм |
ту, мм |
||||
|
углы отклонения у |
углы отклонения у |
|||||
|
0° |
30° |
60° |
0° |
30° |
60° |
|
|
10 |
0,6 |
2,1 |
3,5 |
4,0 |
3,5 |
2,0 |
|
20 |
1,2 |
2,2 |
3,5 |
4,0 |
3,5 |
2,1 |
|
30 |
1,8 |
2,5 |
3,6 |
4,0 |
3,6 |
2,2 |
|
40 |
2,4 |
2,9 |
3,7 |
4,0 |
3,7 |
2,3 |
|
50 |
3,0 |
3,3 |
3,8 |
4,0 |
3,8 |
2,5 |
|
60 |
3,6 |
3,7 |
3,9 |
4,0 |
3,9 |
2,7 |
|
80 |
4,8 |
4,6 |
4,2 |
4,0 |
4,2 |
3,1 |
|
100 |
6,0 |
5,6 |
4,6 |
4,0 |
4,6 |
3,6 |
|
120 |
7,2 |
6,6 |
5,0 |
4,0 |
5,0 |
4,1 |
При съемке здания применяется условная система координат (рис. 2), в которой ось х направлена по нормали к снимаемой поверхности объекта. В таком положении сканирующего луча (нормальный случай съемки) угол Д = 90° и cos Д = 0, поэтому влияние СКП расстояний (mD) на тх и влияние СКП углов (тр) на ту будет в этом положении теоретически отсутствовать, что следует учитывать при выборе станций. При этом возрастает влияние тр на тх и ту с увеличением отстояния D станции от снимаемого объекта. Существенное значение оказывает и величина угла у, особенно на координату х.
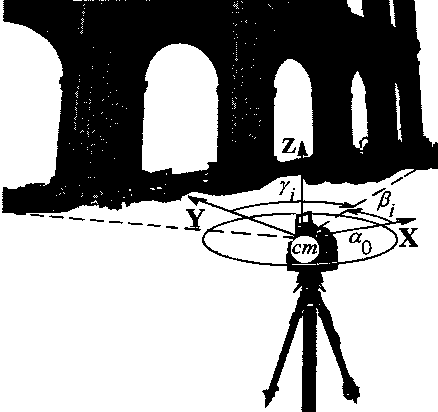
Рис. 2. Условная система координат
Серия «Строительство и архитектура», выпуск 8
Экспертиза и оценка объектов недвижимости
В сканерах Leica Geosystems по паспортным данным СКП ms = 4 мм, а СКП углов равна 60 микрорадианам, что составляет ^=12,4”. Для этих параметров оценены по формулам (2) значения тх и ту при углах отклонения от нормали у, равных 0°; 30°; 60°. Результаты такой оценки приведены в табл. 1.
Анализ табл. 1 показывает, что тх и ту при сканировании в общем случае определяются неравноточно и зависят от расстояния D и углов у, что необходимо учитывать при выборе станции сканера.
Высотное положение отсканированной точки определяется относительно начального высотного направления, имеющего угол наклона у0, по формуле z, = z0 +Sf sin у, -So siny0, (3)
где z0 - координата z начального высотного направления при сканировании объекта.
На основе дифференцирования выражения (3) получим (при условии mZQ = 0 и у0 = 0° ) формулу оценки СКП высотного положения точки i с л2 СЧ V т^ = тс sin2 vz+1 — I cos2 vtm2 + —- I m2 (4)
~ \P) Vp)
где mv - СКП определения сканером угла наклона сканирующего луча.
Оценка точности определения высотного положения точек при наземном лазерном сканировании для различных расстояний от станции и углов наклона луча, выполненная на основе выражения (4), приведена в табл. 2.
Таблица 2 Оценка СКП высотного положения отсканированных точек
|
S, м |
mz, мм, при углах наклона у |
|||
|
0° |
30° |
60° |
90° |
|
|
10 |
0,8 |
2,2 |
3,6 |
4,0 |
|
20 |
1,7 |
2,5 |
3,7 |
4,2 |
|
30 |
2,5 |
3,1 |
4,0 |
4,4 |
|
40 |
3,4 |
3,8 |
4,4 |
4,7 |
|
50 |
4,2 |
4,4 |
4,8 |
5,0 |
|
60 |
5,1 |
5,2 |
5,3 |
5,4 |
|
80 |
6,8 |
6,6 |
6,4 |
6,2 |
|
100 |
8,4 |
8,2 |
7,6 |
7,2 |
|
120 |
10,0 |
9,7 |
8,8 |
8,2 |
Анализ табл. 2 показывает, что наивысшая точность определения планового положения (0,8...3,0 мм) обеспечивается при коротких расстояниях 5 и малых углах наклона v . Для расстояний S < 50 м тх и ту не превысят 4 мм, а т. не превысит 5 мм.
Заключение
При выборе местоположения станций наземного лазерного сканирования рекомендуется учитывать точностные характеристики определения положения снимаемых точек на основе предрасче-та СКП тх, ту и т= по формулам (2) и (4), а также по данным табл. 1 и 2.
При высоких требованиях к точности сканирования следует сократить расстояние 5 и учитывать значения горизонтальных углов отклонения ( у ) и углов наклона ( у ) лазерного луча.
